
Abstract
In this literature, different islanding and their detection techniques are overviewed of the power system network consisting of distribution system along with distributed generator (DG). Penetration of renewable energy utilization and DG is increasing continuously. Islanding detection methods (IDMs) are divided as remote and local methods. Remote methods are based on communication while local methods are again categorized into three types: active, passive and hybrid methods. Active methods are based on direct interaction with the power system operation via perturbation, and passive methods are based on the utilization of local parameters while hybrid methods are the amalgamation of active and passive. Remote and passive IDMs for DG are described and analysed as per detection time, advantage, disadvantage, non-detection zone (NDZ) and power quality issues. Paper will give the broad idea for selecting the better one of IDMs.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
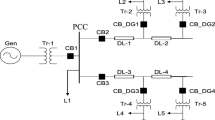
With the rising global power uses and risk of exhausting of traditional combustible, addition of DG set becomes important [1], and for that, advancement in the technology is needed. Advances in technologies as fuel chargeable cells, diesel engines, small wind, hydropower and solar power as well as new developments in the power electronics, deregulation of the energy market, consumer demand for improved power quality (PQ) and reliability; most important environmental issues are pushing the power industry towards the distributed generation. DGs can be described as generation units, other than utility units, which are generally located near to consumers end. By rising the DGs in the electrical system, it can reduce the distribution and transmission losses and improves the voltage (V) profile and power quality [2]. Before the DGs are added to the grid, various obstacles should be resolved. Such concerns include frequency stabilization, voltage stability, renewable resource intermittency, and problems with power quality. Major problem of the distribution system caused during the disconnecting of the central grid, the disconnection of the central grid is called islanding, i.e. shown in Fig. 1, where load is able to get the power from DG only, which might be intentional or unintentional. Intentional islanding is that although they are isolated from the main grid, DGs still supply electricity efficiently to local load. This is a controllable mode of operation, and mostly, this is done for the maintenance purpose, but unintentional islanding is an unacceptable phenomenon due to line tripping, malfunction of metres, etc. [3], and this is an uncontrollable mode of operation.

Power islanding condition
The unintentional islanding of DG leads to several problems like safety issue, fluctuation of the voltage and frequency, stability issue and many more. Hence, it has to be detected as soon as possible within a specified NDZ and DG standards given in Table 1, so that the distributed generators must detect islanding and immediately disconnect, called anti-islanding (AI) detection.
As due to many problems like safety concern, instruments/equipments concern, etc, this paper looks in depth of islanding detection (ID) of remote and passive methods with their pros and cons and also very helpful to researchers when choosing an appropriate ID technique for future islanding detection.
2 Indices/Parameters of Islanding Detection Methods
NDZ became the primary cause for failing of IDMs. NDZ is mainly due to slight power difference between DG and load utilization that leads to variation in V, I and f but not significantly [6]. Detection time also plays an important role, expound as time interval between (b/w) the disconnecting of the central grid and detecting islanding by IDMs, and during islanding events power quality should be maintained as per standard.
3 Islanding Detection Methods (IDMs)
Different IDMs given till now, but these are mainly classified as remote islanding detection (RID) and local islanding detection (LID) methods. RID techniques are concerned with realization on central side, while LID methods are concerned with realization on DG side [7]. LID methods are further categorized as passive islanding detection (PID), active islanding detection (AID) and hybrid islanding detection (HID) methods.
3.1 Remote Islanding Detection Methods
RID approaches are planted as interaction with the power grid and DGs. RID methods work adequately having better reliability than LID methods and also have very negligible NDZ. The main drawbacks of communication-based IDMs are high computational burden, higher cost and complexity in their operations [8]. A transmitter and receiver are used for the communication, i.e. shown in Fig. 2.

Power line of remote islanding consisting of transmitter and receiver
PLC method. In power line communication (PLC) method, continuous signal is broadcasted from the main grid to DGs using power line as the path of the signal. Here, there would be need of the signal transmitter and receiver unit. Signal transmitter is equipped with the grid and signal receiver at the DGs. Generally, the transmitting signal is optimized for the 4 successive cycles and if signal vanishes for 2 or more cycles, islanding events get realized [9]. Due to the rising costs and other complexities, system is ideal for large-scale distributed power networks.
Transfer trip (TT) method. TT method is tangled islanding realization method having additional control of DG via the main grid is attained [10]. Generally, TT method is incorporated into the SCADA program for controlling the running switches while maintaining good synchronization between MG and utility. These processes have almost zero NDZs and giving fast realization of islanding, but limitations are high cost, hardware implementation, etc [11].
Supervisory control and data acquisition (SCADA) method. It is planted as the regular tracking of breaker, recloser, switching device and their control circuit. In a SCADA system, sensitive sensors monitor electrical data such as V, I and f to detect any alteration or failure in the network. When islanding event happens, the grid data are changed immediately, so relay operates and disconnects the DG sources [11].
3.2 Passive Islanding Detection Methods
These methods operate on the principle of measuring of local data such as V, f and power variation as well as harmonic distortion at PCC. These data vary significantly when utility grid is isolated from the integrated power distribution networks or DGs or microgrid. A threshold value has to be set so that islanding and non-islanding (disturbance, slight load variation, etc.) conditions are recognized clearly. PID methods are fast and do not have any issue on power quality but having the large NDZ [12, 13], i.e. the main drawback of passive IDMs. The basic flowchart of PID methods is shown in Fig. 3, and after that various passive IDMs are discussed briefly.

Flowchart of passive IDMs
Over/Under voltage and Over/Under frequency (OUV/OUF). Methods of OUV and OUF allow the realization of islanding phenomena by measuring the V and f at PCC or DG terminals and subsequently compared with the threshold values for the proper operation [14]. Active power difference leads to V variation, while large fluctuation in the f is due to reactive power difference \((\Delta Q \ne 0)\) b/w supply (DG) and demand (load). Approach has reasonable cost, no influence on PQ, and limitations of this approach are having large NDZ. Prediction of detection time is difficult as \(\Delta t\) varies from 4 to 2000 ms, sometime may be more [15].
Rate of change of frequency (ROCOF). Efficiency of passive ROCOF method is centred on frequency measurement at PCC. During sudden power imbalance, the ROCOF \(\left( {df/dt} \right)\) is analysed continuous for the five cycles to abolish the false detection due to the present of transients and compared with the threshold value for generating the trip signal [16]. Generally, it is said that a large system has small ROCOF while a small system has large ROCOF as \(df/dt\) has inverse relation to the moment of inertia and generation capacity. Detection time is up to 24 ms [17], and it is highly efficient.
Rate of change of power output (ROCOP). Principle of ROCOP \(\left( {dP/dt} \right)\) depicts as detection of the changes in the output power of DG network. Owing to loss of main grid, changes in the output power are much greater than the non-islanding case. Realization time of this practice is nearly 24–26 ms [18]. This practice is very responsive when the microgrid has unbalanced burden in lieu of balance load.
Rate of change of frequency over active power (ROCOFOAP). In small generation network, it is shown that \(df/dP\) value is bigger compared to the larger capacity network. ROCOFOAP uses the same concept to determine the islanding condition. A slight change in the power mismatch leads to higher \(df/dP\) value, and thus, it is more sensitive, having smaller NDZ and has lower error detection ratio as well as higher reliability. Expected detection is about 100 ms [19]. Difficulty with this method is in selecting the threshold limit as both things (ROCOF and ROCOP) are required.
Rate of change of frequency over reactive power (ROCOFORP). Among entire PID methods, it is said to be the best one [20]. Approach discriminates the islanding and non-islanding conditions perfectly, but in case of OUV/OUF, ROCOF, ROCOP perfectly discrimination is not possible [21]. Whenever ROCOFORP crosses the preset threshold value, islanding gets detected. It has very narrow NDZ and can say almost zero NDZ.
Phase jump detection (PJD). PJD involves checking for a sudden “jump” of the phase difference between the inverter V & I [22]. In usual mode, the current waveform of inverter is proportioned to the V of the power grid with the help of phase-locked loop (PLL). Whenever phase difference becomes more than threshold value, then islanding detects [23].
The phase difference phenomena occur because only the inverter current is controlled, that is why PCC voltage may deviate their path while current not.
Figure 4 shows the variation of voltage when DG operates just after disconnection of the main grid. Key benefits are easy in implementation and fast detection within 10–20 ms [24]. Yet problem will come during selection of preset value, as phase may be changed during load switching generally motor load.

Principle used in PJD operation
Voltage unbalance (VU). Whenever islanding occurs, DG has the burden of their local load. If the changes in the V, f and phase displacement are large at the PCC, then islanding is detected easily but not effective during small changes. So during small change, VU topology used, as it varies despite of the small changes [7, 25, 26]. VU is planted as the deviation of V at time \(t\) during unbalance and steady state. If VU of 3-phase voltage output of microgrid exceeds the threshold value, then islanding detected. The VU at the time t is described as the proportion of negative and positive sequence voltage.
where \({\text{NSV}}_{t}\) and \({\text{PSV}}_{t}\) are degree of negative (-ve) and positive (+ve) sequence voltages at time \(t\). The realization time is around 53 ms [27]. Problem will come during selection of preset value as −ve sequence V is changed by sudden spike too.
Total harmonic distortion (THD) of voltage and current. Method implements the measure of harmonics in AC signal. During integrated mode, there is almost perfect sinusoidal wave generated, and thus, their THD is near to zero. Due to change in impedance of the load, whenever main grid gets disconnected, large changes occur in their waveform, and hence, THD value rises, after comparing to the threshold value, a trip signal is generated and islanding gets detected [28]. Method is effective for multi-DGs. Drawback is that sometimes nuisance tripping occurs due to nonlinear load switching as THD is sensitive to perturbation.
Voltage unbalance (VU) and THD. Whenever two or more passive parameters are used their accuracy get improved, sometimes NDZ also reduced [29]; thus, effectiveness of the THD method gets increased when THD of current combined with VU method. Additionally, it utilized the voltage magnitude as well. Whenever average voltage get lowered/above more than preset value (around 5%), then it makes immediate trip signal for islanding. Otherwise, it measures \(\Delta {\text{THD}}\) and \(\Delta {\text{VU}}\) in a specified sampling time, and if both exceed their preset value simultaneously, then islanding get detected [30]. This method is capable of detection of islanding correctly.
Rate of change of reactive power (ROCORP) and THD. Practice is based on ROCORP and THD of current. Parameters are measured at DG’s output, orderly to decide islanding and non-islanding events. ROCORP is measured at the first stage, and their threshold value is taken small. Whenever ROCORP exceeds their threshold value, then the analysis would be done on current harmonic, if current THD also crosses their preset value then islanding gets detected [31].
Change in impedance. By computing of V and I at the PCC, impedance can be obtained. Usually, impedance at the utility grid is lesser compared to the microgrid. Whenever the main grid is getting disconnected, the impedance rise suddenly and thus by continuously monitoring of the source impedance, islanding or non-islanding events get detected [7, 32].
Rate of change of voltage and change in power factor (ROCOV and CPF). It is based on the parameters \(\left( {dv/dt} \right)\) and \(\left( {\Delta pf} \right).\) Method is particularly helpful in case of the DG having capacity close to the main generator, it is also helpful in detection of the loss of the parallel feeders. Whenever utility grid disconnected from the integrated distribution network, variation in the voltage degree and power factor occurred at PCC, and thus islanding realized. Its realization time is around 35 ms [33].
Rate of change of negative sequence voltage/current (ROCONSV/C). By the help of sequence analyser, components +ve, -ve and zero sequence of V and I might be separated. The +ve sequence component remains in both (islanding and grid-connected) modes, and −ve sequence component remains during the islanding operation. After comparing the ROCONSV/ROCONSC with their respective set value, an islanding event is being realized easily [34].
Rate of change of positive sequence voltage/current (ROCOPSV/C). As +ve sequence components of V and I are present in all the modes, hence its magnitude will play the role of islanding detection. Positive sequence components are being computed by sequence analyser and compared to the preset defined value; if ROCOPSV/ROCOPSC value crosses that defined value, then balanced islanding condition is realized with zero NDZ [35]. This method will eradicate the switching events and islanding condition perfectly.
ROCO(PSV and PSC). This PID technique is the union of rate of change of +ve sequence V and I. Island gets realized if both ROCOPSV and ROCOPSC exceed the set threshold value. Some of the passive approaches are not capable of detecting islanding condition at low power mismatch, but this method is capable of islanding even at very low power mismatch. Method eliminates islanding condition and non-islanding condition easily. Realization time is also low, i.e. around 10 ms [36].
Rate of change of exciter voltage, over reactive power (ROCOEVORP). Within this method, exciter voltage and power (reactive) are chosen for islanding realization as exciter voltage and reactive power are proportionally vary with the variation of excitation and not depend upon inertia constant, while frequency and active power depend upon inertia constant but not with excitation variation [37]. The affectivity of reactive power and excitation for a variety of excitement is very quick. After measuring of voltage excitation and reactive power, ROCOEVORP \(\left( {dE/dQ} \right)\) is obtained and compared with the preset value for islanding detection [38]. On the basis of exciter voltage, one more technique is used, and name is given as rate of change of exciter voltage with circuit breaker switching strategy (ROCOEV with CBSS). For detection, this technique takes more time compared to ROCOF, OUV/OUF. Advantage is having the small NDZ [39].
Phase angle between negative sequence voltage and current (PANSVNSC). This practice is established upon the principal of phasor estimation of negative sequence V and I by least squares method. The NSV and NSC are obtained by sequence analyser. Absolute phase angle is symbolized as
If the absolute value of phase angle crosses the set point, hence islanding is realized. Advantage of this technique is fast detection, and it works also on zero power imbalance, and hence, NDZ is reduced [40].
Forced Helmholtz oscillator (FHO). This islanding detection method uses the modified frequency at the PCC. In the proposed literature [41], inverter and synchronous-based DGs are used. Method uses chaos concept principle, and forced Helmholtz oscillator, oscillator input is modified frequency. Change between chaotic motion and normal motion has their own advantage of this oscillator. This method detects the \(\pm\) 0.4% active power mismatch, and hence, their NDZ is negligible.
4 Comparison of IDMs
After reviewed of many islanding detection methods, a healthy comparison is made among the RID and PID methods on the basis on (NDZ), detection time and PQ, i.e. shown in Table 2. Every technique has its own merits and demerits. There is no any IDM which will work accurately in all conditions, but according to need, IDM can be chosen. On the basis of cost, IDMs can also be classified as, generally PID has lowest cost, RID has highest cost, AID and HID cost are in between the two. Comparisons are made according to the prescribed references.
5 Conclusion
In this paper, different kinds of IDMs (remote, passive) have been described for the utility connected microgrid system. The IDMs comparison is made on the basis of standards of Table 1. Remote methods are based on the communication scheme, that is why cost is high and most reliable, as NDZ is zero and no power quality issue. But in case of local methods, these indices vary as per the different kinds of local methods named as passive, active and hybrid. Passive technique does not cause any problem on power quality and has high NDZ, but the modified or integrated passive has somehow less NDZ; i.e. why integrated passive IDMs are more beneficial. Generally, passive detection time is low compared to other methods. Due to the high cost and complexity during installation, RID methods are not chosen. After being the above-mentioned limitation of PID methods, still it is chosen over RID due to their lesser cost and easy implementation, but PID and modified PID are more suitable for the small microgrid system. For large system, RID is best. Hence, this literature is providing a good concept over islanding detection, and it will be helpful for the future research.
References
Dutta, S., Sadhu, P.K., Reddy, M.J.B., Mohanta, D.K.: Shifting of research trends in islanding detection method-a comprehensive survey. Protect. Control Modern Power Syst. 3(1), 1 (2018)
Acharya, N., Mahat, P., Mithulananthan, N.: An analytical approach for DG allocation in primary distribution network. Int. J. Electric. Power Energy Syst 28(10), 669–678 (2006)
Chiang, W.J., Jou, H.L., Wu, J.C.: Active islanding detection method for inverter-based distribution generation power system. Int. J. Electr. Power Energy Syst. 42(1), 158–166 (2012)
Basso, T.S.: IEEE 1547 and 2030 Standards for Distributed Energy Resources Interconnection and Interoperability with the Electricity Grid; National Renewable Energy Laboratory: Golden, vol. 15013. CO, USA (2014)
CH, R.R., Reddy, K.H.: Islanding detection techniques for grid integrated DG–A review. Int. J. Renew. Energy Res. 9(2), 960–977 (2019)
Ye. Z., Kolwalkar, A., Zhang, Y., Du. P., Walling, R.: Evaluation of anti-islanding schemes based on nondetection zone concept. IEEE Trans. Power Electron. 19(5), 1171–6 (2004)
Mahat, P., Chen, Z. and Bak-Jensen, B.: Review of islanding detection methods for distributed generation. In: Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, pp. 2743–2748. IEEE (2008)
Rumbayan, M.: Development of power system infrastructure model for the island communities: a case study in a remote island of Indonesia. In: International Conference on Advanced Mechatronic Systems, pp. 515–518 (2017)
Wang, W., Kliber, J., Zhang, G., Xu, W., Howell, B., Palladino, T.: A power line signaling based scheme for anti-islanding protection of distributed generators: Part II: Field test results. IEEE Trans. Power Deliv 22, 1767–1772 (2007)
Raza, S., Mokhlis, H., Arof, H., Laghari, J.A., Wang, L.: Application of signal processing techniques for islanding detection of distributed generation in distribution network: A review. Energy Conversion Manag. 96, 613–624 (2015)
Kim, M.S., Haider, R., Cho, G.J., Kim, C.H., Won, C.Y., Chai, J.S.: Comprehensive review of islanding detection methods for distributed generation systems. Energies 12(5), 837 (2019)
Bikiran, G., Rami, J.H., Youakim, K.: A novel passive islanding detection technique for converter based distributed generation systems. In: IEEE Power & Energy Society Innovative Smart Grid Technologies Conference, pp: 1–5 (2015)
Zhao, J., Zhang, D., He, J.: A passive islanding detection method based on inter harmonic impedance. In: IEEE Conference on Energy Internet and Energy System Integration pp. 1–6 (2017)
IEEE 929. IEEE recommended practice for grid interface of photovoltaic (PV) systems. New York, NY: Institute of Electrical and Electronics Engineers; April, (2000)
Jones, R.A., Sims, T.R., Imece, A.F.: Investigation of potential islanding of a self-commutated static power converter in photovoltaic systems. IEEE Trans. Energy Convers. 5(4), 624–631 (1990)
Gupta, P., Bhatia, R.S., Jain, D.K.: Active ROCOF relay for islanding detection. IEEE Trans. Power Deliv. 32(1), 420–429 (2016)
Guha, B., Haddad, R.J., Kalaani, Y.: A passive islanding detection approach for inverter-based distributed generation using rate of change of frequency analysis. In South east Conference, pp 1–6. IEEE (2015)
Nasir aghdam, H., Ghadimi, N., Farhadi, P., Hashemi, F., Ghadimi, R.: Detecting the anti-islanding protection based on combined changes of active and reactive output powers of distributed generations. In: 2011 3rd International Conference on Computer Research and Development, pp. 285–289. Shanghai (2011)
Nikolovski, S., Baghaee, H.R.: Islanding detection of synchronous generator-based DGs using rate of change of reactive power. IEEE Syst J 13(4), 4344–4354 (2019)
Raza, S., Mokhlis, H., Arof, H., Mohamad, H., Laghari, J.A.: Prioritization of different passive parameters for islanding detection on the basis of response analysis. IEEE International Conference on Power and Energy (PECon), pp. 615–619. Melaka (2016)
Raza, S., Mokhlis, H., Arof, H., Laghari, J.A., Mohamad, A.: A sensitivity analysis of different power system parameters on islanding detection. IEEE Trans. Sustain. Energy 7(2), 461–470 (2016)
Hu, W., Sun, Y.: A compound scheme of islanding detection according to inverter. Asia-Pacific Power and Energy Engineering Conference, pp. 1–4. Wuhan (2009)
Khichar, S., Lalwani, M.: An analytical survey of the islanding detection techniques of distributed generation systems. Technol Econ Smart Grids Sustain Energy 3, 10 (2018)
Singam. B., Hui, L.Y.: Assessing SMS and PJD schemes of anti-islanding with varying quality factor. IEEE International Power and Energy Conference, pp. 196–201. Putra Jaya (2006)
Mahat, P., Chen, Z., Bak-Jensen, B.: Review on islanding operation of distribution system with distributed generation. IEEE Power and Energy Society General Meeting, pp. 1–8. Detroit, MI, USA (2011)
Sung-Il, J., Kwang-Ho, K.: An islanding detection method for distributed generations using voltage unbalance and total harmonic distortion of current. IEEE Trans. Power Deliv. 19(2) 745–752 (2004)
Tzelepis, D., Dyśko, A., Booth, C.: Performance of loss-of-mains detection in multi-generator power islands. 13th International Conference on Development in Power System Protection (DPSP), pp. 1–6 Edinburgh (2016)
Jose, B.K., Vincent, G.: Harmonic current based islanding detection for grid connected PV systems. 2017 IEEE International Conference on Circuits and Systems (ICCS), pp. 191–195. Thiruvananthapuram (2017)
Zeineldin, H.H., Kirtley, L.A.: A simple technique for islanding detection with negligible nondetection zone. IEEE Trans. Power Deliv. 24(2), 779–786 (2009)
Laaksonen, H.: New multi-criteria-based algorithm for islanding detection in smart grids. 3rd IEEE PES, (ISGT Europe), pp. 1–8. Berlin (2012)
Danandeh, A., Seyedi, H., Babaei, E.: Islanding Detection Using Combined Algorithm Based on Rate of Change of Reactive Power and Current THD Techniques. 2012 Asia-Pacific Power and Energy Engineering Conference, pp. 1–4. Shanghai (2012)
Jun, L., Xue-liang, H., Xiao-hu, C., Miao, X., Wen, X.: Two islanding detection circuits based on the impedance variation for the micro-grid. The 2nd International Symposium on Power Electronics for Distributed Generation Systems, pp. 859–863. Hefei (2010)
Salman, S.K., King, D.J., Weller, G.: New loss of mains detection algorithm for embedded generation using rate of change of voltage and changes in power factors (2001)
Kumar, K.M., Naresh, M., Singh, N.K. and Singh, A.K.: A passive islanding detection approach for distributed generation using rate of change of negative sequence voltage and current. IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics Engineering pp. 356–360. IEEE, (2016)
Rostami, A., Jalilian, A., Naderi, S.B., Negnevitsky, M., Davari, P., Blaabjerg, F.: A novel passive islanding detection scheme for distributed generations based on rate of change of positive sequence component of voltage and current. Australasian Universities Power Engineering Conference, Melbourne, VIC, pp. 1–5 (2017)
Reddy, C.R., Reddy, K.H.: An efficient passive islanding detection method for integrated DG system with zero NDZ. (IJRER), 8, pp. 1994–2002 (2018)
Rostami, A., Bagheri, M., Naderi, S.B., Negnevitsky, M., Jalilian, A., Blaabjerg, F.: A novel islanding detection scheme for synchronous distributed generation using rate of change of exciter voltage over reactive power at DG-Side. Australasian Universities Power Engineering Conference, Melbourne, VIC, 2017, pp. 1–5 (2017)
Naveen, G., Reddy, K.H., Reddy, C.R., Ramakrishna, B., Bramaramba, P., Reddy, L.B.: Passive islanding detection method for integrated DG system with balanced islanding. Int.J. Pure Appl. Maths 120(06), 4041–4058 (2018)
Rostami, A., Jalilian, A., Hagh, M.T., Muttaqi, K.M., Olamaei, J.: Islanding detection of distributed generation based on rate of change of exciter voltage with circuit breaker switching strategy. IEEE Trans. Ind. Appl. 55(1), 954–963 (2018)
Bashir, J., Jena, P., Pradhan, A.K.: Islanding detection of a distributed generation system using angle between negative sequence voltage and current. In Eighteenth National Power Systems Conference (NPSC), pp. 1–5. IEEE (2014)
Bakhshi, M., Noroozian, R., Gharehpetian, G.B.: Novel islanding detection method for multiple DGs based on forced helmholtz oscillator. IEEE Trans. Smart Grid 9(6), 6448–6460 (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Shastri, R., Samadhiya, A., Namrata, K. (2021). A Comprehensive Review of Remote and Passive IDMs of Utility Grid Integrated MG System—Part I. In: Gupta, O.H., Sood, V.K. (eds) Recent Advances in Power Systems. Lecture Notes in Electrical Engineering, vol 699. Springer, Singapore. https://doi.org/10.1007/978-981-15-7994-3_45
Download citation
DOI: https://doi.org/10.1007/978-981-15-7994-3_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-7993-6
Online ISBN: 978-981-15-7994-3
eBook Packages: EnergyEnergy (R0)