
Abstract
Change in autoreaction happens through the geometrical metamorphosis of one or more parts within the system. From the selection of the geometrical features of the system, it depends on multiple factors that have consequences on its dynamic and energetic efficiency. The choice of fitting morphological features and their integration with all other mechanical and energetic factors is therefore essential to achieve an optimized design. This chapter describes the frames of reference used to represent geometries and motion, the physical parameters of the morphologies and the morphological dimensions involved in common movements.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


The morphology or the shape of a moving system is much more complex to represent, to understand and to design than that of a static object as it changes in time, in space and sometimes also in function.
In this chapter, the aspects concerning the morphosis, or the “shaping”, of the autoreactive system are discussed, from the spatial framework (the morphospace) within which the change happens, the geometry (morphology), the process of shape change (the morphosis), to the capacity of the shape and the motion features to add a new dimension and unique identity to the artefact.
2.1 Morphospace
The morphospace is, in evolutionary biology, an imaginary multi-dimensional space where different organisms can be compared through their different morphological parameters, represented on different axes (Valentine 2004). In a technical context, the morphospace is rather seen as the special trajectories that a body’s shape follows through space and time (Steadman and Mitchell 2010). The morphospace, therefore, defines all the positions that the object will assume acting along specific planes and paths from the starting morphology to its final morphology.
Defining and describing the parameters of a body in motion within that morphospace is essential, not only to understand and shape the morphology of an autoreactive system, but also to control its movement.
2.1.1 Frame of Reference
To describe the geometrical features of an element, a frame of reference is needed as the body can have different shape and kinetic proprieties depending on how it is oriented. A shared coding system is also necessary to describe relationships of parts within the system itself, and ultimately to represent the movement in the best way.
The virtual space used to represent a movement often resembles the body’s own morphology, for an intuitive and straightforward description and understanding of the movement. In music, the staff is divided symmetrically according to the mode of the execution (a staff for the right hand and one for the left hand for the piano), while dance notation is characterized by symmetrical features which recall the structure of the body which performs the movement (Maletic 1987).
In the context of kinetic man-made artefacts, planar geometric right-angle projections are typically used, as in the case when representing static elements. Descriptive geometry allows to represent three-dimensional objects in two dimensions by creating planar geometric right-angle projections of the object within a Cartesian coordinate system, with plan, elevation and sections as outcome. This method of representation, however, presents some major flaws when aiming to fully describe a movement.
First of all, depending on the geometry of the object and the movement performed, variations in the virtual space might be more suitable: in the case of a kinetic five-pointed star element, a pentagrammic representation might be more suitable than a two-dimensional Cartesian coordinate system.
Secondly, the same movement can appear very differently depending on the point of view it is observed from. To be fully able to describe a movement within a system, and the relationship between the moving parts and the static parts within that system, it is important to use a single frame of reference to distinguish between planes of projection of the movement.
To fully describe the complexity of the movements relatively to each other, inspiration is taken from the anatomical planes—an abstract concept used to describe human and animal body anatomy in a coordinate system. The anatomical planes are four imaginary planes that pass through a body, following its geometry, that are then used to describe anatomy, location and movements (Ogele 2013). In the context of autoreactive systems, an adaptation of this same concept is made to describe the geometrical features and their movements. The virtual planes are (Fig. 2.1):

Virtual planes used to describe moving geometries in autoreactive systems
-
Median plane (Anat. sagittal plane), the single vertical plane that passes through the main axis of symmetry of the body, dividing it into right and left halves. In bodies with more than one axis of symmetry, the median plane is the first reference to be set, as all other planes then refer to it;
-
Paramedian planes (Anat. parasagittal planes) will be used to refer to all other planes that are parallel to the median plane, but do not divide the body on its main axis of symmetry;
-
Frontal planes (Anat. coronal planes) are all the planes at right angles to the median plane passing through the body, dividing it into front and back portions. In those bodies, where a specific axis of symmetry identifies front and back, the frontal plane passing through that axis will be referred to as mid-frontal;
-
Horizontal planes (Anat. transverse planes) are all the planes at right angles to the median and the frontal plane passing through the body, dividing it into top and bottom. In those bodies, where a specific axis of symmetry identifies top and bottom, the horizontal plane passing through that axis will be referred to as mid-horizontal.
Additional terms used to describe the virtual planes above more in detail are:
-
View, when the plane does not intersect with the body;
-
Section, when the plane intersects with the body.
As can be noticed looking at many examples, the frontal view is one of the most commonly used views to represent the geometry of a man-made artefact. To represent a specific movement, however, the views of the planes where the action occurs are usually represented: human running, for instance, occurs in the median and the horizontal planes, while jumping occurs in the median and frontal planes.
2.1.2 Keeping Track of Movements
Reversible moving systems, which are the object of focus in this context, can generally be described and controlled by defining at least three of its moving stages (Fig. 2.2):

Example of the rigid movement in an object using a planar geometric right-angle projection showing the movement trajectories, the point of attachment to the main body and the free end with three moving stages p0, pn and plim
-
The starting position (p0), which is the position or shape taken as reference before the system is set into motion. It is generally identified as a resting position for the system, such as a closed door which perfectly fits its frame;
-
The limit position (plim), which is usually the position furthest away from the starting position, where the system needs to be returned to, such as a door fully opened to its widest point at 180 degrees;
-
One or more intermediate positions (pn), helping to identify the nature of the movement in between the starting and the limit position. Many movements move from p0 to plim and then reverse the same identical movement to return to p0, while others proceed with a new movement to return to p0. In the second case, more than one intermediate position might be necessary to define the movement.
2.1.2.1 Transition Between Morphologies
When representing moving three-dimensional elements, the projection where the change of shape is the most representative is generally chosen and the different shapes undertaken at regular time intervals are overlapped. This type of representation mostly focuses on the geometric aspects within the movement, aiming to display their evolution rather than describing the parameters of the movement itself.
2.1.2.2 Trajectories
The most common way of describing a geometry in motion is to identify in each movable part, a point of attachment to the main body (or to other body parts) and at least one free end. Theoretically, the maximum movement is performed at the free end while no movement is performed at the point of attachment. The free end is moving relatively to its point of attachment in a specific direction described by a direction symbol. Key points on the moving part can also be identified and followed by drawing the trajectory of these specific points (Fig. 2.2).
Further variables to take into account, such as folding and bending points, variating degrees of contraction and elongation, etc. can be described with appropriately defined symbols.
2.1.2.3 Centre of Gravity
Keeping track of how the centre of gravity (G) changes during the transition from one geometry to another in the body is a key issue to control the mobility of the body, as well as its balance, and kinetic potential (these aspects are further discussed in Chap. 3) (Fig. 2.3).

From Ji et al. (2014)
Representation of how the centre of gravity (G) shifts during the slow walking gait of a a gecko, b a stinkbug and c a spider. The dots highlight the shifting of (G), while the lines indicate feet-holding positions.
Generally, the possible phases that the centre of gravity can undergo are five in number:
-
1.
G does not move, which means that either the whole body remains static, or parts of the body move so as to neutralize each other;
-
2.
G is shifted, which means that its location is adjusted within the space occupied by the body so as to improve on a specific performance;
-
3.
G is transferred, which relates to a displacement of the body in space;
-
4.
G can be identified but no part of the body actually carries the weight, which happens during jumps or flight phases;
-
5.
G rotates.
2.1.2.4 Timeframe
The timeframe is a central aspect in the description of a motion. It is therefore surprising how few time-related parameters are found in technical representations of kinetic systems.
Ideally, the virtual space representing the movement is subdivided in sections representing a time unit. The bars that set the basic time unit use a constant amount of space or can be flexible depending on the amount of information that needs to be indicated in between two time units. This way, the movements described inside that frame are given a specific duration (Fig. 2.4).

Modified from Hudson et al. (2012)
Biomechanical example of a movement described within a specific timeframe: comparison of the footfall patterns in a greyhound (dark grey) and a cheetah (light grey)—non-lead forelimb (NLFL), lead forelimb (LFL), non-lead hindlimb (NLHL) and lead hindlimb (LHL).
Within the defined timeframes representing successive movements, patterns of one or more factors can be identified as repeating themselves (geometries, movements, sounds, etc.). Controlling and shaping these patterns is a powerful tool to create unity within a work, but also to make the work dynamic by providing recognizable milestones for the observer to measure the change with. This opens up to completely different parameters that characterize the movement, the perception of the scene and conveying of emotions.
The pace of a movement strongly defines a personality and character in objects by conveying sensations and emotions to the observer. Speed gives sensations of excitement, stress, effectiveness while slower movements provide feelings of control, relaxation and encourage observation. This is why some types of movements can also be a bad or a good choice in terms of user experience. For instance, the fast and aggressive movements of a car are purposefully designed to give the impression of dealing with an organism of higher intelligence such as an animal, while slower movements reminding more of a plant’s slow reactions might fit a building skin better.
Similarly, the transition between phases, movements or gaits modulates the dynamic flow, accompanying the movement into a new pattern ensuring a smooth and effective transition between states. This happens during the slow in and slow out: in technology as in nature, systems need to go through different gaits, or gears, to allow the system to efficiently slow down before reaching a complete stop or speed up reaching full speed. The design of these stages is important from an energetic point of view, but it also enhances the feeling of the observer for the movement.
2.1.2.5 Relationship Between Parts
The relationships between movements within specific timeframes are comparatively used less in design and engineering and are much more developed in other fields such as biomechanics, music or dance, where these parameters have a recognized fundamental importance. It is however through the design and control of these kinds of relationships that a great number of characteristics of a movement are controlled, in terms of function, energy efficiency and aesthetics alike.
The arrangement and frequency of repetition of movement patterns in time, whether it is referred to as rhythm (music) or gait (biomechanics), and characterizes a great number of fundamental functions that are an intrinsic part of moving patterns (Fig. 2.5).

Chronophotographic sequence of the rhythmic pendulum-like walking pattern of a man (from Marey 1884). The sequential movement of the head, the upper and lower limbs are identified through markings on the body
A gait (biomechanics) is defined by the timing and frequency with which an animal performs a specific movement (footfall) pattern: such as jumping, crawling, walking, skipping or running. Changing gait, as a machine changes gear, is a way for a system to adapt to different speeds, terrain, manoeuvres, etc. and guarantee energetic efficiency. Specific gaits are used for specific speeds: as fast walking becomes strenuous for the organism we intuitively switch to running where a different oscillating system allows a more efficient energetic return at a lower energy input (Persiani 2018).
We have evolved an innate sensitivity and attraction to rhythms. Falling into a specific rhythm or beat is an exciting active experience for humans, which often closely relates to beauty, wherein a variation is also essential. One manifestation of this tendency is entrainment, a sort of magnetic effect with which one rhythm creates an attraction upon another rhythm, influencing its frequency and drawing the phases to change timing until they couple to the same frequency (Bush and Clarac 1985). This happens as people walking next to each other fall into the same walking frequency, or when music influences coordinated motion, such as during treadmill walking, running and dancing (Leman et al. 2013).
Among the many variations that can be identified within patterns of action and can also help the description of the effect(s) achieved, two examples are:
-
Pitch (much used in music) which is a subjective sensation of reaching a high or low peak in a succession of actions. In a physical movement, this can be reflected by the maximum or minimum expression of a movement. In all contexts, the design of the way (modus) of reaching the climax is of extreme importance for maximizing the aesthetic and energy expression of the movement;
-
Climax, which individuates the building up of energy in the pattern (through acceleration, succession of size change, sound, accumulation, etc.) to reach the highest or a high point in the overall movement. In energy terms, this kind of pattern will be connected to a specific kinetic design, while in aesthetic terms, it reflects in a building up of expectations from the part of the observer which is connected to the comprehension of the overall pattern and anticipation of the rising of defined parameters.
2.2 Morphology
Motion strongly depends upon the geometrical features of the elements it is made of. Factors such as inertia, weight, energy absorption and balance depend on geometry. Therefore, the choice of fitting morphological features, as well as an integrated development of morphological, mechanical and energetic factors is of fundamental importance to design systems with an optimized capacity to move.
In nature, where kinetic systems have developed and been selected over millions of generations and trials, morphology, movement type and movement control have co-evolved exploiting the morphological features in energetic and mechanical contexts to the utmost (Pfeifer 2000). If we assume that each one of these combinations of physical, mechanical and geometrical features have adapted to the specific physical conditions it operates in at a maximum output and a minimum energetic input, then the observation of the combination of these features is enormous evolutionary advantage in technical terms (Persiani et al. 2016).
In the following section, fundamental parameters defining morphological typologies and the dynamic potentials or drawbacks that are the consequence of using these features are discussed.
2.2.1 Symmetry
Engineering structures as well as most organisms in nature are often built with some degree of symmetrical or geometrically organized body plan.
Symmetrical features not only simplify design and construction processes, as a way of forming patterns and connections through the repetition of simple sets of information (Gruber 2011; Persiani 2018), but often also represent an optimum in terms of efficiency (Várkonyi and Domokos 2007).
Setting aside the graphic or aesthetic use of symmetric and asymmetric features, the design of the body shape strongly affects the kinetic characters of a system. Correlation between morphological symmetry and locomotive efficiency has been indirectly demonstrated in biology and technology, as systems with a higher degree of symmetry tend to exhibit greater locomotive efficiency than organisms with higher asymmetry (Persiani 2018; Valentine 2004).
There are mainly three types of symmetry—reflection, rotation and translation symmetry—and a number of possible combinations of these.
2.2.1.1 Reflection Symmetry
Reflection symmetry is also known as linear or bilateral symmetry. A figure has reflection symmetry if it can be divided into two identical, mirrored halves by a single line identifying the axis or the plane of symmetry.
Linear symmetry suggests an almost monodimensional mirroring along the median plane, and partially along the horizontal plane, reproducing a sequence of similar elements along the central body axis (Fig. 2.6).

Linear symmetry in the Paddington Basin Rolling Bridge, top and side view. The bridge would display perfect linear symmetry if it was not for its kinetic operation, which enables the bridge to roll up only on one side of the canal (see also case study in Chap. 6)
In biological terms, bilateral symmetry is so important that in Linnaean taxonomy (the science naming, defining and classifying groups of biological organisms based on their shared characteristics), organisms displaying “bilateral” symmetry are classified into one same monophyletic group—which include most animal species apart from sponges, medusae, polyps, comb jellies and basal multi-cellular organisms (Maiorana and Van Valen 2020).
In this context, the axis of reflection is generally identified with the median plane (see Sect. 2.1.1. Frame of reference) (Fig. 2.7).

Bilateral symmetry in a corkscrew
Typical kinetic characteristics of systems displaying reflection symmetry are:
-
Directionality of motion. The symmetry axis often identifies the preferred direction of motion, which can also be further subdivided into a “forwards” and a “backwards” direction, meaning that motion happens mainly in one of the two directions highlighted by the axis, the opposite direction (when enabled) being used mainly to enable manoeuvres;
-
Differentiation of functional body parts. As the parts allotted for locomotion can specialize on locomotion in one prevalent direction, other body parts are freed for other uses;
-
Fluid dynamic proprieties. As anything that moves around on our planet needs to move through at least one medium, and mostly a fluid such as air or water, the body shape is also important in terms of fluid dynamics. Fluid dynamic shapes are in fact mostly directional (with a front and a rear) and exhibit reflection symmetry at least in one dimension.
2.2.1.2 Rotation Symmetry
Rotation symmetry is developed multi-laterally and equidistantly starting from a central point. It can be further subdivided into radial and spherical symmetries.
Radially symmetrical shapes are developed bi-dimensionally, circularly or along axes (tri-, tetra-, penta-, hexa-, octa-merism) (Fig. 2.8). In some cases, radial symmetry does not present any mirroring axis, but is rather the product of the rotation of an asymmetrical shape. Asymmetrical radial shapes are very common in mechanics, and especially in gearing, where the asymmetrical proprieties of the teeth confer different proprieties to the mechanism depending on the direction of rotation of the gear (see also Chap. 3).

Radial symmetry in a pocket watch (left) and a close to spherical symmetry in an armillary sphere
Spherical symmetries are, on the other hand, three-dimensional, meaning that the system can be cut into two identical halves through any cut that runs through the geometrical centre (Fig. 2.8).
Typical characteristics of systems displaying rotation symmetry are:
-
Multi-directionality of motion. Ideally, systems with rotation symmetry are able to move, function or operate in more than one direction in the plane where they exhibit rotation symmetry;
-
Multi-functional body parts. As all radial body parts resemble each other, the functional specialization of body parts is no longer possible, and several functions need to cohabit and be managed by each segment;
-
Dynamic stability in the planes that do not show any radial symmetry; dynamic rotational potential in the planes that show radial symmetry, with a centred centre of gravity.
Depending on how extreme the rotation symmetry in the body is, and whether it presents any reflectional symmetrical elements, the kinetic characters that can be achieved are very varied. An example is animals with more than four legs which, although properly bilateral, exhibit radial kinetic proprieties as the ability to move sideways as well as in the direction of their heads (Biewener 2007; Cruse and Graham 1985).
2.2.1.3 Translation Symmetry
In translation symmetry, a geometry is reproduced in another position while maintaining its general or exact orientation. The intervals between the geometries do not have to be equal in order to maintain the translational symmetry, but generally bind the shapes together by respecting some kind of proportion. Translational symmetry is very important in nature and artefacts alike, as it is used for multiplication principles such as segmentation and pattern-creation.
Segmentation often combines the translation symmetry with a linear symmetrical development: more or less identical subunits are used to form a structure, as in the bones of a spinal cord. A great number of mechanical systems, and in particular chain systems, are created using this technique (Fig. 2.9).

Translation symmetry in two cylindrical roller bearings (1–2); (3) radial organization of the segmented translation of the roller spheres
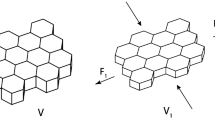
In pattern-creation, the translation happens in a bi-dimensional or three-dimensional dimension rather than in a monodimensional one. What is mostly interesting, from a dynamic perspective, in these patterns is—more than the overall geometry of the system itself, the connections that exist between the reproduced geometries and the intervals that binds each part together with its neighbour (Fig. 2.10).

Example of pattern-creation of a metallic fabric out of a simple element with four connections
Typical characteristics of systems displaying translation symmetry are:
-
Directionality of motion mostly happens in the planes orthogonal to the translation plane, as the latter locks the single parts together to some extent;
-
Single elements tend to be monofunctional, but the system has a potential for creating complexity and emergence of behaviour on a larger scale.
2.2.1.4 Symmetry Combinations
Systems combining two or three base-symmetries also exhibit a mix of the dynamic characters of these.
The bi-radial symmetry is a particular combination of a radial and a bilateral symmetry that can be found in some natural systems such as comb jellies. In this case, the system exhibits reflection symmetry on the median plane and radial symmetry on the horizontal plane, through a succession of different elements (Fig. 2.11). Bi-radial symmetry is very common in mechanical systems, where gear trains and turbines can display this type of symmetry.

Bi-radial symmetry in the design of a sectioned turbine
Spiral symmetries can be seen as a combination of the radial and the segmentation symmetries, where the geometry is constantly reproduced along a line, around a fixed central point/axis individuated outside the physical boundaries of the organism, at a continuously increasing or decreasing distance from the point. Natural systems using the spiral of Archimedes, the logarithmic spirals and Fibonacci sequences are quite common as this type of shape formation is a way to preserve energy and proportions of an organism during growth (Wolpert et al. 2011) (Fig. 2.12).

Spiral, helical and screw symmetries in different designs for wind turbines
Helix symmetries combine the radial and linear symmetries by developing, turning around the axis while moving parallel to the axis. Double-helix symmetries add a rotated translation to the normal helix (Fig. 2.12).
Screw-like symmetries combine the spiral symmetry and the linear symmetry to obtain a helix where the distance from the centre of rotation increases or decreases at a constant rate (Fig. 2.12).
2.2.1.5 Asymmetry
An asymmetric system presents no symmetric proprieties at all throughout its overall body structure, and in all three dimensions.
Total asymmetry is relatively rare, both in nature and in man-made things. Generally, systems with higher asymmetry present several handicaps among which:
-
Difficulty of use (for tools). A totally asymmetric tool is not only more difficult for a user to grasp (while on the other hand, a tool’s symmetrical features give clues about its possible function) and therefore also to use;
-
In kinetic terms, highly asymmetric bodies tend to have erratic and deviating movements, therefore, requiring a higher energy expenditure to counterbalance and stabilize motion (Wolpert et al. 2011; Arthur 1997).
Partial asymmetry, on the other hand, meaning small deviations from the perfect geometrical symmetry, is extremely common in nature—from opposable thumbs to the asymmetric placement of important organs such as the heart. Generally, these exceptions are connected to a functional propriety or specialization of that body part (Valentine 2004).
Partial asymmetry is much less common in engineering problems, where asymmetrical proprieties are often correctly interpreted as un-optimal and imperfect. The use of small localized geometrical perturbations to improve on the response of engineering structures has, however, been theorized and suggested (Várkonyi and Domokos 2007).
2.2.2 Scale
Similar geometries are often used across very different scales, however, the size of moving parts in relation to their function and to their means of operation have a determining effect on the complexity of the kinetic system in terms of interaction with the surrounding medium, structural sizing, energetic and locomotive parameters. These geometries are here called sibling geometries, meaning they exhibit the same geometry but at different scales in size.
In fact, as the design of a mechanical system (natural or artificial) is copied and reproduced at a different scale, its dimensions and proprieties cannot be uniformly sized up or down: there are structural and functional consequences to the changes made to the linear, areal and volumetric dimensions. As these are scaled at different rates, all processes from structural design to energy balance are strongly affected by these parameters.
When the same geometry is applied to dimensionally different scales, three basic design parameters must co-evolve together with the geometry to ensure a successful kinetic outcome (Schmidt-Nielsen 2004):
-
Dimensions, as structures grow progressively thicker and bulkier as the size grows;
-
Materials, which typically need to be progressively replaced, from lighter and flexible materials at small scales to more rigid alternatives at larger scales;
-
Design, changing the structural behaviour of the system, such as from compression to tension elements.
These three aspects need to be integrated so as to solve different issues at different scales while ensuring the system’s efficient operation, according to the end purpose. Three of the most recurrent size-related changes in conditions are here further discussed.
2.2.2.1 Medium of Motion
The medium of locomotion is defined as the type of environment that the system moves through or on: aquatic (in or on water), terrestrial (on ground or other surfaces), fossorial (underground) or aerial (in the air).
The nature and proprieties of the medium play an important role in the design of the movement, which it influences it in different ways on different scales. This, for instance, becomes very obvious on very small scales, such as in microstructures of one centimetre or smaller. Very small autoreactive systems moving in fluids (air, water or other fluids) at low Reynolds numbers, need to be designed considering that viscous forces dominate rather than turbulent ones. As turbulence is absent, the aerodynamic or fluid dynamic shape of the system becomes largely irrelevant and even counterproductive as the ability to move through the fluid is more bound to the body’s capacity to reduce friction drag (Biewener 2007). As any symmetrical movements would cancel each other out, these systems must rely on more asymmetrical kinetics to achieve propulsion.
It is, therefore, important in these contexts to distinguish between systems where a perfect kinetic performance is not vital and success can be achieved, although the system does not unfold at its best, and systems where the good kinetic performance is inseparable from the task to be performed. The first case is, for instance, a system where the reaction is mainly aimed at unlocking a specific potential—as in remotely activated biomedical devices performing drug delivery (Genchi et al. 2017). Here, the dynamics of the kinetic reaction are secondary to the timing of the reaction: what is important is that the content is delivered at the right moment. The second case is when the dynamics of the movement itself are central to the task to be performed—as in self-folding mobile microrobots where not only the folding sequence and coordination is important to achieve the intended shape but also to enable the robot to move around and carry loads (Hardesty 2015). In this latter case, the medium becomes a main parameter in the device’s design.
2.2.2.2 Weight of the System
An aspect that radically limits the design of kinetic system is the size and the weight of the system itself. As the size of the design grows, large-scale constructions typically present bulkier structural frameworks that weigh more and take up proportionally larger areas. This affects the body’s inertia (see Sect. 3.1.4. Principle of Inertia for the definition), the physical propriety of all bodies to resist changes in their state of motion, which, becoming exponentially high as the size and the weight of the system grows, affects its capacity to move and be handled.
It is, therefore, not surprising that dynamic systems are rarely achieved on very big scales at all—unless strictly necessary. The dynamic proprieties are rather integrated by introducing smaller kinetic parts that consume in proportion less energy and are easier to handle and maintain (Fig. 2.13).

As anticipated, there are some context-specific cases where the size of the moving parts becomes an advantage rather than a drawback. This is, for instance, the case of wind turbines, where the amount of energy that can be extracted at a given wind speed is proportional to the size of the rotor—more exactly, to the cube of the wind velocity and to the square of the rotor radius (Gipe 2009). This means that a small increase in rotor diameter significantly increases the power generation of turbines. In this case, the manoeuvrability of the kinetic system is secondary to the speed of rotation and hence of the power output of the turbine.
2.2.2.3 Manoeuvrability Versus Speed
The manoeuvrability of a system—or in other words how easily it allows to be moved and directed—depends on the previously mentioned inertia of a body. This biomechanical principle can also be seen in natural systems, where, for instance, a bird’s wing shape influences their patterns of flight. Long and narrow wings allow stable long-distance flights with little energy expenditure while short and stubby wings require a more energetic flight mode but allow very quick changes in direction (Biewener 2007).
The most movable systems are those that can make sharp and sudden changes of direction, while being characterized by low centres of mass, narrow and tendentially more varied shapes. As the weight is not too much of an issue in kinetic systems with a contained size, a bigger variation in shape can be achieved without significant losses in terms of energy efficiency.
The narrowness of the shape, on the other hand, although it reduces the body’s inertia, therefore, increasing manoeuvrability has important consequences on the speed of the motion. Since stride length (or the length of a lever) is a clue factor in speed, systems with small body shapes have in fact limited possibilities to achieve speed compared to larger body structures. Low speed is, therefore, the other side of the coin of manoeuvrability, and vice versa: objects travelling at fast speeds increase their inertial mass, resisting change and becoming less manoeuvrable.
2.3 Morphosis
The morphosis is a concept that describes the change of a shape in time and space—it therefore no longer describes one shape, but a whole process of transformation from one shape to another. While in biological terms, the morphosis involves a physical formation or development through an irreversible additive process, in this context only reversible changes are taken into consideration.
In morphological terms, reversible mechanisms (mechanisms that can be returned to their initial shape before the action) are most often connected to specific geometries which accommodate and embed an intrinsic potential for change (Persiani 2018).
Overlapping is a way to organize, condense and protect a set of similar or identical geometrical shapes by allowing them to slide over one another until they take up the smallest surface possible. Overlapping geometries are often accompanied by a hinge system or similar, which allows to keep the shapes moving parallelly to each other (Fig. 2.14).

Overlapping geometry in a wooden hand fan
The main advantages for which this type of motion geometry is used are:
-
Chain reaction. In some cases, the shapes have a defined range of motion relatively to one another, resulting in the movement of the first shape to drive the sliding in all the successive parts;
-
Fast deployment. The geometry is particularly high-efficient from an organizational and technical point of view, allowing the element to deploy in very short time lapses, without any risk of being jammed.
-
Stability. Overlapping single areas can also be a way to effectively introduce a system-based surface stability, as in the case of a hand fan or in birds’ wings.
Folding subdivides a broader surface in two or more areas (the faces) linked to one another through common bending edges (the folds) that can behave like rotational hinges or localized bending regions during folding (Fig. 2.15).

Adapted from Lee et al. (2013). Thanks to the folding geometry, the size of the wheels can be manipulated through actuated folding and unfolding, allowing the robot to move in smaller spaces if needed
Example of a Miura folding sequence (1–3); (4) application of a folded sheet into a wheel structure for a mini robot.
The main advantages for which this type of motion geometry is used are:
-
Storage. As the faces are made to rotate relatively to one another following the folds, and successively packed upon one another following pre-determined folding schemes, the initial surface can be compactly and efficiently stored before the folding sequence is inverted and the surface deployed anew. These characters make folding structures among the most researched geometries in the context of self-deployable systems in engineering, allowing to attain a theoretically endless number of possible end-shapes using conventional origami folding techniques (Peraza Hernandez et al. 2019).
-
Structural proprieties. A second typical use that is made of folding geometries derives from the added structural proprieties that can be embedded within a light and thin surface by introducing folding: the capacity of changing the structural stability, rigidity and capacity to resist to mechanical loads.
Bending is closely related to the folding principle, with the exception that the folding axis is found outside the physical boundaries of the organism, resulting in a more or less evident curving of the body (Fig. 2.16).

Bending of a springboard
The main advantages for which this type of motion geometry is used are:
-
Structural flexibility. This is a strategy that is often used in elastic systems to gather up kinetic energy within the geometrical structure. It is also a useful and simple movement in uniform body structures made of materials or substances that cannot integrate a hinge or folding point for different reasons;
-
Dynamic flexibility. In some systems using bending geometries, the areas where the bending geometrically occurs are not always pre-determined, enabling the system itself to adaptively change the position and the magnitude of the bending itself.
Rolling is a way to organize large surfaces and slender structures, obtaining a compact shape of circular section (Fig. 2.17).

Rolling of a wire around the axis of a yo-yo
The main advantages for which this type of motion geometry is used are:
-
Structural rigidity. Rolled-up shapes have a structural function, using the multi-directional load-bearing proprieties of the circular shape allowing to move large surfaces into their final position without deforming the surface during motion, and only successively deploying it—as in the growth of many leaf structures;
-
Fast deployment. The geometry is particularly high-efficient from an organizational and technical point of view allowing the element to deploy in very short time lapses, without any risk of being jammed;
-
Protection. In the rolled-up shape, the area of the surface that is in direct contact with the exterior is minimal, making it therefore an optimal way to protect the inner parts.
Twisting is obtained in elongated structures where a flexible plane passing through the structure’s rigid axis is longer than the axis itself, resulting in a helical deformation of the plane (Fig. 2.18).

Twisting in the paper wrapping a candy
The main advantages for which this type of motion geometry is used are:
-
Structural proprieties. Twisting geometries with a helical shape provide multi-directional load-bearing proprieties in combination with an extremely light structure;
-
Protection of the inner surfaces;
-
Structural flexibility.
Buckled, undulated or crumpled shapes are a way to compact mono and bi-dimensional surfaces by shortening the prevalent dimensional extension of the element by occupying as much space as possible in the other dimensions (Fig. 2.19).

Shredded paper packaging of a box with eggs. The crumpled and undulated paper surfaces are used as a dampening
The main advantages for which this type of motion geometry is used are:
-
No pre-defined geometry. The main typical characteristic of this type of shape is that no specific geometry or folding system needs to be pre-determined for this type of folding to be achieved;
-
Flexible folding. By organizing a surface occupying a larger area, the geometry does not need to use folding lines that can damage the surface. Rather, the surface gets a little crumpled but avoids sharp bending edges.
Thinning extension and thickening compression are the two geometrical extremes of a constant volume subject to linear change in dimensions: contraction and decrease in one of its dimensions result in an increase in another dimension (Fig. 2.20).

Extension and thinning of a knitted surface with an enlargement showing the deformation of the pattern
The main advantages for which this type of motion geometry is used are:
-
Wide array of deformations. By controlling the various dimensions and parts of the body, many possible geometric deformations can be achieved, locally and in the overall system;
-
Change in stiffness. Structural stiffening of the structure can be modulated and controlled in detail by locally controlling the boundaries of the volume.
Expansion and shrinking geometries are capable of multiplying and dividing the volume they occupy by enabling change in one or more of their dimensions, in some cases also independently from change in the other dimensions. If these systems have a fix surface boundary, it needs to be very flexible to accommodate the change in volume (Fig. 2.21).

Frontal view and section of an auxetic surface. This kind of geometry allows localized shrinking and expansion, accommodating to any underlying shape
The main advantages for which this type of motion geometry is used are:
-
Change in physical proprieties. Change in volume means change in the physical dimensions of a system and hence being able to modulate factors such as inertia, mass and shape.
-
Sealing. Closing and opening of passages or views.
2.4 Identity
Designing motion is not only a matter of engineering the successive stages of metamorphosis in an object—from the initial shape, passing through intermediate shapes, and back. It is also a highly creative process responsible for the beauty of the movement performed, which ultimately impacts not only its perception, but can also be reflected in a higher functionality and desirability of the product—giving it an identity and a soul with a variety of expressions.
A movement that is poetic goes beyond the purely practical. It is invested with aspects of conscious emphasis that heighten its potential beyond the purely technical. This apparent addition does not necessarily imply higher costs or lower efficiency, but what it can achieve if implemented successfully is an increase in usefulness and inherent value—becoming part of our cultural identity—and therefore also increasing its long-term sustainability (Schumacher et al. 2010).
Beauty does not come automatically as a by-product of its practical optimization but must be consciously embedded. A growing use is made of motion as a powerful and creative way of conferring anthropomorphic qualities to inanimate systems as a way to attract and keep the users’ attention. In that sense, designers more than any other professionals in the field of the engineering sciences are trained to highlight the aesthetic potential of motion in objects, as is well represented in the smoothness of the movements and sounds connected to the design of modern vehicles in general. These are far from being casual and are instead the result of a very careful design and programming.
Without venturing into all the relevant multi-sensory aspects involved in the perception of motion, some factors impacting the aesthetic quality of the motion are briefly discussed. These concepts and principles are borrowed from the field of graphical animation, where a few of these key concepts have been identified and used for more than a century (Thomas and Johnston 1997).
Staging relates to the way the kinetic concept is presented. It is a way for the designer to direct what is being communicated to the observer by stressing one or more aspects of a movement while putting other actions in the background. It is a way to catch the observer’s attention and help him focus on the movement so that part of the kinetic effect is not lost.
Emphasizing motion is an effective way of communicating to the user the physical proprieties of the bodies involved in the movement. There are many possible ways of emphasizing a movement. Most techniques consist in slightly exaggerating certain effects to give additional physical information. One such way is, for instance, the design of vibration and sound, which are among the major qualities in the attributes that customers look for in a sports car. These are part of the communication of power and reliability to the driver (Gupta et al. 2016).
Anticipation introduces a small action in the opposite direction of the main movement in the instants before it starts. It gives the observer a clue of what is going to happen next and in this way enhances the movement.
Supporting actions. If the “primary movement” refers to the main action performed (a bird flying), the “supporting actions” are all other movements that happen as an effect of the primary action (bird’s feathers moving). Although the autoreactive mechanical design might be focused on the main action, secondary details and characters can be added to the system to highlight the overall qualities of the movement.
2.5 Conclusions
This chapter has reviewed a series of aspects that are central to an efficient morphological kinetic design. The parameters have been broken down into four main aspects that define the features as well as the effect of the kinetic action. These aspects are:
-
The morphospace or the special trajectories that a body’s shape follows through space and time. It is defined as the virtual frame of reference and the conventions used to describe the transition between morphologies;
-
The morphology, or the geometrical categories of features the moving parts are made of;
-
The morphosis, which refers to the process of shape change in time and space. Specific geometries which accommodate and embed an intrinsic potential for change are discussed with their strengths;
-
The identity, which is an additional quality that can be conferred through designing a specific movement. It is responsible not only for the beauty of the movement performed but can also give access to a higher functionality.
As a brief inventory of conceptual tools, these single aspects need to be combined and skilfully matched with the aspects described in the other chapters in order to achieve smart and efficient autoreactive designs.
References
Arthur W (1997) The origin of animal body plans: a study in evolutionary developmental biology. Cambridge University Press, Cambridge, UK. https://doi.org/10.1017/CBO9781139174596
Attia S (2016) Evaluation of adaptive facades: the case study of Al Bahr Towers in the UAE. In: Q science proceedings, Qatar green building conference 2016 the action, vol 2016, no 8. Hamad bin Khalifa University Press (HBKU Press). https://doi.org/10.5339/qproc.2016.qgbc.8
Biewener AA (2007) Animal locomotion. Oxford University Press, Oxford, UK. ISBN 978-0-19-850022-3
Bush BMH, Clarac F (1985) Introduction. In: Bush BMH, Clarac F (eds) Coordination of motor behaviour. Cambridge University Press, Cambridge, pp 1–7. ISBN 978-0521264259
Cruse H, Graham D (1985) Models for the analysis of walking in arthropods. In: Bush BMH, Clarac F (eds) Coordination of motor behaviour. Cambridge University Press, Cambridge UK. ISBN 978-0521264259
Genchi GG, Marino A, Tapeinos C, Ciofani G (2017). Smart materials meet multifunctional biomedical devices: current and prospective implications for nanomedicine. Front Bioeng Biotechnol 5(80). https://doi.org/10.3389/fbioe.2017.00080
Gipe P (2009) Wind energy basics: a guide to home and community-scale wind-energy systems, 2nd edn. Chelsea Green Publishing. ISBN 9781603582278
Gruber P (2011) Biomimetics in architecture, architecture of life and buildings. Springer, Wien. ISBN 978-3-7091-0331-9
Gupta A, Sharma S, Narayan S (2016) Vehicle noise and vibration. In: Gupta A, Sharma S, Narayan S (eds) Combustion engines: an introduction to their design, performance, and selection. Scrivener Publishing LLC, pp 103–119. https://doi.org/10.1002/9781119284543
Hardesty L (2015) Centimeter-long origami robot. Controlled by magnetic fields, tiny robot climbs inclines, swims, and carries loads twice its weight. MIT News, MIT News Office, 12 June 2015. Retrieved 12 Apr 2020 from http://news.mit.edu/2015/centimeter-long-origami-robot-0612
Hudson PE, Corr SA, Wilson AM (2012) High speed galloping in the cheetah (Acinonyx jubatus) and the racing greyhound (Canis familiaris): spatio-temporal and kinetic characteristics. J Exp Biol 215:2425–2434. https://doi.org/10.1242/jeb.066720
ICD (2013) HygroSkin: meteorosensitive pavilion, ICD research buildings/prototypes. Institute for Computational Design and Construction. Retrieved 21 Apr 2020 from https://www.icd.uni-stuttgart.de/projects/hygroskin-meteorosensitive-pavilion/
Ji A, Lei Y, Wang J, Ni Y, Dong B, Dai Z (2014) Variation in spatial and temporal kinematics of level, vertical and inverted locomotion on a stinkbug Erthesina fullo. Chin Sci Bull 59(26):3333–3340. https://doi.org/10.1007/s11434-014-0310-x
Lee D-Y, Kim J-S, Koh J-S, Cho K-J (2013) The deformable wheel robot using magic-ball origami structure. In: Proceedings of the ASME 2013 international design engineering technical conferences and computers and information in engineering conference IDETC/CIE. American Society of Mechanical Engineers, New York
Leman M, Moelants D, Varewyck M, Styns F, van Noorden L (2013) Activating and relaxing music entrains the speed of beat synchronized walking. PLoS ONE 8(7). https://doi.org/10.1371/journal.pone.0067932
Maiorana VC, Van Valen LM (2020) Bilateria: an organ-level of organisation. Animal. Encyclopaedia Britannica, Inc. Retrieved 10 Apr 2020 from https://www.britannica.com/animal/animal/Animal-diversity#ref405227
Maletic V (1987) Body, space, expression: the development of Rudolf Laban’s movement and dance concepts. de Gruyter W (ed). ISBN 9783110107807
Marey EJ (1884) Geometric chronophotograph of a man in a black suit. In: Jensenius AR (ed) Some video abstraction techniques for displaying body movement in analysis and performance, vol 46, issue 1. Journal of International Society for the Arts, Sciences and Technology, Leonardo, pp 53–60 (2013)
Ogele TA (2013) Anatomical terms, anatomical planes. OpenStax, Rice University. Retrieved 7 Apr 2020 from https://cnx.org/contents/Gko70fNo@1/Anatomical-Terms
Peraza Hernandez E, Hartl DJ, Lagoudas DC (2019) Active origami. Modeling, design, and applications. Springer, Cham, Switzerland. ISBN 978-3-319-91865-5
Persiani SGL (2018) Biomimetics of motion, nature-inspired parameters and schemes for kinetic design. Springer, Cham, Switzerland. https://doi.org/10.1007/978-3-319-93079-4
Persiani SGL, Molter PL, Aresta C, Klein T (2016) Mapping of environmental interaction and adaptive materials for the autoreactive potential of building skins. In: Proceedings of the 41st IAHS World Congress on Sustainability and Innovation for the Future, Albufeira, Portugal
Pfeifer R (2000) On the role of morphology and materials in adaptive behavior. In: Meyer J-A et al (eds) From animals to animats 6, proceedings of the sixth international conference on simulation of adaptive behavior. The MIT Press, Cambridge, UK. ISBN 978-0262632003
Schmidt-Nielsen K (2004) Scaling, why is animal size so important? 1st edn., 1984. Cambridge University Press, Cambridge, UK. ISBN 0-521-31987-0
Schumacher M, Schaeffer O, Vogt MM (2010) Move. Architecture in motion—Dynamic components and elements. Birkhaüser, Basel. ISBN 978-3764399863
Steadman P, Mitchell L (2010) Architectural morphospace: mapping worlds of possible built forms. Environ Plan 37:197–220. https://doi.org/10.1068/b35102t
Thomas F, Johnston O (1997) Illusion of life: disney animation, disney editions, pp 47–69. ISBN 978-0786860708
Valentine JW (2004) On the origin of phyla. The University of Chicago Press, Chicago and London. ISBN 0-226-84548-6
Várkonyi PL, Domokos G (2007) Imperfect symmetry: a new approach to structural optima via group representation theory. Int J Solids Struct 44(14–15):4723–4741. https://doi.org/10.1016/j.ijsolstr.2006.11.047
Wolpert L, Tickle C, Lawrence P, Meyerowitz E, Robertson E, Smith J, Jessell T (eds) (2011) Principles of development, 4th edn. Oxford University Press. ISBN 978-0199549078
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Persiani, S.G.L. (2020). Morphosis of Autoreaction. In: Design of Autoreaction. Design Science and Innovation. Springer, Singapore. https://doi.org/10.1007/978-981-15-6178-8_2
Download citation
DOI: https://doi.org/10.1007/978-981-15-6178-8_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-6177-1
Online ISBN: 978-981-15-6178-8
eBook Packages: EngineeringEngineering (R0)