
Abstract
With the continuous refinement of multi-GNSS and multi-frequency data processing, there is an increasing interest for the observation model based on uncombined (UC) strategy. Ambiguity resolution is an important issue in the field of GNSS. The ambiguity fixing of wide-lane (WL) is based on the MW combination of pseudo-range and carrier phase observations, with the geometry-free and ionospheric-free (IF) characteristic. A significant disadvantage of MW combination is that it is contaminated by pseudorange observations. This study proposes a method that does not need to use MW combination to derive the WL ambiguity. Instead, the original UC float ambiguity is used to obtain the WL ambiguity. The float ambiguity obtained through parameter adjustment is measured using the carrier phase observation, which is more accurate than the MW combination observations. The new method is applied to the dual-frequency UC precision orbit determination experiment. The residual distribution of WL DD ambiguity is first analyzed, and results show that the new method is closer to the integer value than the residual distribution of the MW strategy. Then use the GPS observation data of about one month to verify orbital accuracy of the new method, and compare with results of the UC and IF strategies, respectively. Results show that the orbit and clock products obtained by the new method receive the best accuracy. The new method is also applicable to other UC ambiguity resolution situations, such as UC precise positioning.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
The global navigation satellite system (GNSS) has entered the multi-system and multi-frequency era. In order to make full use of the observations at each frequency, the uncombined (UC) observation model, i.e. the raw GNSS observation equation is used and no linear combination is processed, has attracted more and more attention. The UC strategy facilitates the unification of observation models, and is suitable for low-cost single-frequency applications, high-precision multi-frequency applications with the strong scalability. Keshi et al. [1] first studied the observation model of the UC strategy, and pointed out that the ionospheric-free (IF) combination ignored time-varying characteristics of the ionospheric delay. Zhang [2] compared the advantages and disadvantages of the two strategies of IF and UC in detail, and verified the positioning performance. Li [3] studied the real-time precise positioning method based on UC strategy and fixed the ambiguity. Schönemann et al. [4] showed that the difference or linear combination of observations would cause information loss. In recent years, the research on UC observational models has been deepened and applied more widely. Gu et al. [5, 6] used a UC observation model to fix the ambiguity and model the ionospheric delay. Li et al. [7] and Xiao et al. [8] analyzed the three-frequency ambiguity fixing method of UC model. When using three linear combinations for calculating fractional code bias (FCB), they used UC float ambiguities to derive the wide-lane ambiguity, rather than MW combination observations.
For UC precise orbit determination (POD), Strasser et al. [9] used UC strategy to evaluate GPS orbital accuracy during the period of 2003–2017. Results showed that comparable products accuracy was derived comparing to other analysis centres. Zeng et al. [10] proposed a UC POD method to improve the computational efficiency for the problem of huge ionospheric parameters.
This study proposes a new method to derive WL ambiguity. The observation model of satellite precise orbit determination is given first, then a new ambiguity fixation strategy is introduced. The new method is verified, and following that is the conclusion. The work is carried out based on the software of satellite positioning and orbit determination system (SPODS) [11].
2 Methodology
The observations model is first given and then the ambiguity resolution method is described.
2.1 Satellite Precise Orbit Determination Model
Assume that the ground station r receives the pseudorange P and carrier phase L of a satellite s at the frequency i. The observation equations are
where \( \rho_{r}^{s} \) the station-satellite geometric distance, \( \lambda \) the wavelength, \( \varphi \) the carrier phase measurement (in the unit of cycle), \( \delta t_{r} \) and \( \delta t^{s} \) the receiver and satellite clock offset, c the speed of light. \( T_{r} \) is the tropospheric delay mapping function from the zenith of the station to line of sight and \( I_{r,1}^{s} \) is the coefficient of the fist-order ionospheric delay for the frequency i = 1. \( B_{r,i}^{{}} \) and \( B_{i}^{s} \) is the pseudorange hardware delay for the receiver and satellite, respectively. \( b_{r,i}^{{}} \) and \( b_{i}^{s} \) is the carrier phase hardware delay for the receiver and satellite, respectively. \( N_{r,i}^{s} \) is the ambiguity. \( \varepsilon_{r,i}^{s} \) and \( \xi_{r,i}^{s} \) is the pseudorange and phase noise. It should be noted that there are still some error terms that are not listed when establishing the observation equation, including the antenna phase center error, the station zenith tropospheric dry delay, and tide correction.
Define the following formulas
where \( m,n \) denote the frequency. The differential code bias (DCB) is in the unit of meter.
At present, the clock products released by IGS are based on the reference of dual-frequency IF code combination. Since
Taylor series expansion of the observation equation to take the first order term, and parameter reorganization of (1) can be obtained
where
\( \rho_{0} \) the approximate geometric distance, \( \varvec{u}_{r}^{s} { = }\left[ {\begin{array}{*{20}c} {u_{x} } & {u_{y} } & {u_{z} } \\ \end{array} } \right]^{T} \) the partial derivative of the geometric distance \( \rho = \sqrt {(x^{s} - x_{r} )^{2} + (y^{s} - y_{r} )^{2} + (z^{s} - z_{r} )^{2} } \), corresponding to the station coordinate, \( \varvec{x} = \left[ {\begin{array}{*{20}c} {dx_{r} } & {dy_{r} } & {dz_{r} } \\ \end{array} } \right]^{T} \) the coordinate correction parameter. In the observation equation, the satellite position, velocity and force model parameters are omitted. It is obvious that the partial derivative is \( - u_{x} , - u_{y} , - u_{z} \) multiplying the state transition matrix to the satellite position, and multiplying the sensitivity matrix to the force model parameters.
It can be seen that after using the IF combined satellite clock datum (i.e. \( \overline{\delta t}^{s} \)), the pseudorange hardware delay is absorbed by the satellite clock, the receiver clock, the ionospheric delay and the ambiguity parameters, respectively, without need to additionally estimate the code delay parameters. There is no pseudorange delay parameter in the phase observation. In order to maintain the consistency of the clock reference and ionospheric parameters to pseudorange equation, the ambiguity parameter absorbs the code delay combination \( B_{{IF_{12} }}^{s,Q} \) and \( B_{{r,IF_{12} }}^{Q} \) from the clock and \( \gamma_{i}^{Q} \cdot \beta_{12}^{Q} \left( {DCB_{r,12}^{Q} - DCB_{12}^{s,Q} } \right) \) from the ionospheric parameter.
2.2 Traditional Ambiguity Resolution Method
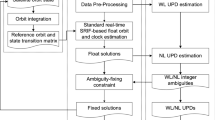
Ambiguity resolution (AR) is the key problem for the GNSS precise data processing. The AR method of IF observation model for the POD is to use the double-differenced (DD) method. The baseline network is set up by using IF undifferenced (UD) float ambiguities to obtain the IF DD ambiguities, and the IF ambiguities are decomposed of WL- and NL-DD ambiguities. WL- and NL-DD ambiguities are fixed sequentially. The UD ambiguity is fixed with the DD constraint. The AR idea of UC POD is basically the same as that of the IF strategy. The difference is the ambiguity parameter contains the code combination \( \gamma_{i}^{Q} \cdot \beta_{12}^{Q} \left( {DCB_{r,12}^{Q} - DCB_{12}^{s,Q} } \right) \) from the ionospheric delay. However, it can decompose into WL and NL to fix the ambiguity, where the ionospheric-related code combination can be eliminated. Ignoring the satellite and receiver identification, the MW observation reads
where \( L_{MW} \) contains the UD WL ambiguity \( N_{w} \) with the wavelength \( \lambda_{w} = c/(f_{1} - f_{2} ) \). bias contains the observations noise and multipath error. In order to reduce the effect of error item, the WL ambiguity must be averaged over a consecutive data arc. The formula is
where \( \left\langle {N_{w} } \right\rangle_{i} \) the average values of MW observations in a continuous arc, \( N_{wi} \) the WL ambiguity in the ith epoch, \( \sigma_{w,i} \) the standard derivation (STD) of WL ambiguities. Assuming that the DD operator is \( {\mathbf{d}} \), the WL DD ambiguity can be derived \( N_{(r,q),w}^{(s,l)} = {\mathbf{d}}N_{w} \), where \( r \) and \( q \) are two stations, \( s \) and \( l \) are two satellites. The probability decision function is used to calculate the rounding success rate. If it passes, the integer WL DD ambiguity value \( \hat{N}_{(r,q),w}^{(s,l)} \) is obtained.
Assuming that the ambiguity parameters of L1 and L2 frequency in the unit of meter are \( n_{r,1}^{s} \) and \( n_{r,2}^{s} \), then
Assuming NL ambiguity \( N_{r,n}^{s} = N_{r,2}^{s} \), the NL DD ambiguity \( N_{(r,q),n}^{(s,l)} \) and its STD \( \sigma_{n}^{D} \) can be expressed as
where \( \sigma_{1}^{D} \) and \( \sigma_{2}^{D} \) are the STD of DD ambiguities \( n_{(r,q),1}^{(s,l)} \) and \( n_{(r,q),2}^{(s,l)} \). Similarly, the probability decision function is used to obtain the integer value \( \hat{N}_{(r,q),n}^{(s,l)} \) of NL DD ambiguity. The fixed value of the DD ambiguity of the original frequency can be obtained.
The fixed DD ambiguity information is constrained to the original UD observation equation, and all unknown parameters are updated to obtain the parameter estimation result of AR.
2.3 New Ambiguity Resolution Method
Different from the previous method, the new method does not need to use formulas (6)–(7), but uses UC float ambiguities to obtain WL DD ambiguities.
The following strategy is used to judge whether the ambiguity can be fixed: if \( \left| {N_{(r,q),w}^{(s,l)} - round(N_{(r,q),w}^{(s,l)} )} \right| < 0.2 \), then it is considered that the WL ambiguity can be fixed, and the rounding success rate is assumed to be 1. The integer value \( \hat{N}_{(r,q),w}^{(s,l)} = round(N_{(r,q),w}^{(s,l)} ) \) of WL DD ambiguities can be obtained. After the WL DD ambiguity is obtained, the following AR strategy is the same as Sect. 2.2.
2.4 Equivalence Proof of Two AR Methods
In order to verify the equivalence of two methods, double-difference calculations are performed for MW combination observation
Since the MW combination eliminates the geometric distance and first-order term of ionospheric delay. Seeing formula (4), after using the MW linear combination, only the re-parameterized ambiguity remains
The above formula is equal to formula (11), which verifies that the ambiguity parameter obtained by the MW combination is consistent with UC float ambiguity parameter. The difference is mainly reflected in the way of the acquisition. The MW combination uses the original pseudorange and carrier phase observation data to obtain the WL ambiguity, while in the new method the UC float ambiguity is calculated through parameter adjustment with only high-precision carrier phase observations used. Therefore, it can be seen that the accuracy of WL ambiguity obtained from the new method should be higher.
3 Results Verification and Analysis
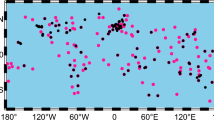
In order to verify the new method, a comparative analysis is performed from two aspects: the residual distribution of WL ambiguity and the results of POD. Since the new AR method uses 0.2 weeks as a threshold, i.e. the WL DD ambiguity with fractional part smaller than the threshold is forced to fix the integer and the rounding success rate is assumed to be 1. Therefore, whether new method is better than traditional method, which needs experimental verification. Because GPS precise products have the best products accuracy, satellite status has been solidified, and various error models are processed well, GPS satellites are selected for experimental verification. In the experiment, a total of 12 GPS BLOCK IIF satellites and about 60 IGS ground stations are used for POD. The time period is 1 to 35 days in 2018. The station distribution is shown in Fig. 1. The processing strategy of observation model and force model is shown in Table 1. The POD arc length is 1d. Three POD schemes are processed: POD with IF model (IF), POD with UC model, POD with UC model using the new AR method (UC-new).

Ground station distribution map
3.1 Wide Lane Residual Distribution
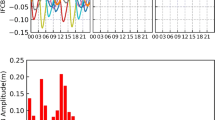
Figure 2 plots the residual distribution of all WL DD ambiguities derived over 35d, and Table 2 gives the percentage of each interval 0.1 cycle. Compared with the WL DD ambiguity derived using the MW strategy, the distribution of new UC method is closer to the integer value. The percentage of residuals within 0.2 weeks was 5.8% more, an increase of about 7.6%. This shows that the accuracy of the WL DD ambiguity obtained by the new method is higher than that of the MW strategy.

Residual distribution of wide-lane double-differenced ambiguities
3.2 Validation of POD Results
Also use this period for processing POD, the orbit and clock results are compared to the final product of IGS, and the average value of all satellites in each arc is obtained. The orbital accuracy of GPS satellites in radial (R), tangential (T) and normal (N) direction is shown in Fig. 3. Figure 4 gives the STD and RMS of clocks. Table 3 lists the overall mean of all POD arcs. Among them, the G26 satellite is abnormal in the result of the 17th day, and the result of that day is excluded.

Orbit comparing results of each POD arc

Clock comparing results of each POD arc
-
(1)
Compared with the UC scheme, the orbit and clock accuracies of the UC-new scheme are better. The accuracy of GPS orbits is improved by about 3% in each direction. The clock STD is improved by 4.3% and the clock RMS is improved slightly.
-
(2)
Comparing the results of the traditional IF strategy and the UC strategy, the orbits and clocks obtained using the two observation models are basically equivalent. The UC results are slightly better than the IF results.
-
(3)
From the results of each POD arc, the new scheme is worse in some arcs. The possible reason is that the method of deriving the integer WL DD ambiguity needs to be improved. The strategy used in the new method is that if the fractional part of WL DD ambiguity is within 0.2 weeks, then it is regarded as a fixable ambiguity. However, the original method to derive the wide-lane double-difference ambiguity is to use MW strategy, where the rounding success rate are determined by the probability decision function according to the standard derivation of MW observations series.
4 Conclusion
This study proposes an improved AR solution of UC POD, that is, the WL DD ambiguity is derived without using the original MW observations, but using UC float ambiguities from parameter adjustment. The residual distribution of WL DD ambiguities shows that the new method has higher accuracy, with residuals less than 0.2 weeks being about 5% higher than the traditional MW method. GPS satellites are used for POD verification, with IF, UC and UC-new three schemes. Results show that the new method is slightly better than the old method, although the overall results are basically the same. The reason why the improvement is slight is that when the WL DD ambiguity is less than 0.2 weeks, it is fixed directly. The rounding success rate is assumed to be 1. The rounding strategy still needs to be improved and further research is needed.
References
Keshin, M.O., Le, A.Q., van der Marel, H.: Single and dual-frequency precise point positioning: approaches and performance. In: Proceedings of the 3rd ESA Workshop on Satellite Navigation User Equipment Technologies, NAVITEC 2006, Noordwijk, The Netherlands, pp. 11–13 (2006)
Zhang, B., Ou, J., Yuan, Y., et al.: Precise point positioning algorithm based on original dual-frequency GPS code and carrier-phase observations and its application. Acta Geodaetica Cartogr. Sin. 39(5), 478–483 (2010). (Ch)
Li, X., Ge, M., Zhang, H., et al.: A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geodesy 87(5), 405–416 (2013)
Schönemann, E., Becker, M., Springer, T.: A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J. Geodetic Sci. 1(3), 204–214 (2011)
Gu, S., Shi, C., Lou, Y., et al.: Ionospheric effects in uncalibrated phase delay estimation and ambiguity-fixed PPP based on raw observable model. J. Geodesy 89(5), 447–457 (2015)
Gu, S., Lou, Y., Shi, C., et al.: BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J. Geodesy 89(10), 979–992 (2015)
Li, P., Zhang, X., Ge, M., et al.: Three-frequency BDS precise point positioning ambiguity resolution based on raw observables. J. Geodesy 92(12), 1357–1369 (2018)
Xiao, G., Li, P., Gao, Y., et al.: A unified model for multi-frequency PPP ambiguity resolution and test results with Galileo and BeiDou triple-frequency observations. Remote Sens. 11(2), 116 (2019)
Strasser, S., Mayer-Gürr, T., Zehentner, N.: Processing of GNSS constellations and ground station networks using the raw observation approach. J. Geodesy 93(7), 1045–1057 (2019)
Zeng, T., Sui, L., Xiao, G., et al.: Computationally efficient dual-frequency uncombined precise orbit determination based on IGS clock datum. GPS Solutions 23(4), 105 (2019)
Ruan, R., Jia, X., Wu, X., Feng, L., Zhu, Y.: SPODS software and its result of precise orbit determination for GNSS satellites. In: China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume III, pp. 301–312. Springer, Heidelberg (2014). https://doi.org/10.1007/978-3-642-54740-9_27
Acknowledgements
IGS MGEX is gratefully acknowledged for providing GPS data and products. The research was substantially funded by National Natural Science Foundation of China (Grant Nos. 41674016, 41704035, 41874041, 41904039) and by State Key Laboratory of Geo-Information Engineering, NO. SKLGIE2018-M-2-1.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zeng, T., Qin, X., Sui, L., Ruan, R., Jia, X., Xiao, G. (2020). A New Ambiguity Resolution Method Applied to Uncombined Precise Orbit Determination. In: Sun, J., Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC) 2020 Proceedings: Volume II. CSNC 2020. Lecture Notes in Electrical Engineering, vol 651. Springer, Singapore. https://doi.org/10.1007/978-981-15-3711-0_13
Download citation
DOI: https://doi.org/10.1007/978-981-15-3711-0_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-3710-3
Online ISBN: 978-981-15-3711-0
eBook Packages: EngineeringEngineering (R0)