
Abstract
To maintain reliable and secured power system operation, relays are designed to operate at a faster rate so as to provide an appropriate tripping signal to circuit breakers under any abnormal transient condition. During swing phenomenon, operation of a relay is required to block with the help of PSB function so that any nuisance operation can be avoided. Unblocking operation can easily be issued by the relay in case of an unsymmetrical fault, but detection of symmetrical fault is a difficult task. A novel approach to discriminate three-phase fault from power swing using the root mean square (RMS) value of superimposed current signal is proposed in this paper. Superimposed current signal is estimated by taking the difference between two consecutive cycles considering the recursive window approach. The index is then computed by estimating the RMS value from the one-cycle superimposed current components. The generated index helps the relay to discriminate symmetrical fault from power swing. To verify the response of proposed method, a 400 kV, 50 Hz WSCC 9-bus test system is considered and simulated with different fault cases. The power system model is simulated using PSCAD/EMTDC software, and results indicate the robustness of the proposed algorithm.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Power swing condition may arise in power system due to the occurrence of fault, line outages, generator outages and abrupt change in the load [1]. Distance relay is designed to generate trip command whenever quantified apparent impedance enter into its operating characteristics and remains in it. But for non-fault cases like power swing, switching event, etc., the apparent impedance may likewise go into the operating zone causing undesirable tripping of the relay. Specially to handle relay operation during power swing phenomenon, PSB (power swing blocking) function is provided [2]. Unblocking of PSB function is crucial if any fault occurs during swing so that an immediate clearance of the fault is possible. Availability of sequence components for any unsymmetrical fault during power swing can easily be detected, but these components are absent in stable conditions. Detection of symmetrical fault during the power swing is an arduous task to perform by the relay. Different schemes have been suggested by the researchers to mitigate the symmetrical fault-swing discrimination issue [3,4,5,6,7,8,9,10,11,12,13,14,15,16,17]. These techniques can be categorized as signal processing-based, analytical-based, intelligence-based methods and decomposition techniques.
Other techniques such as wavelet transforms [3, 4], Prony analysis [5], DFT [6] and LES-based approaches [7] are also utilized to discriminate three-phase (symmetrical) fault from power swing contingent upon the extraction of high-frequency content presents in transient signal. The methods were capable of detecting the fault accurately within a power cycle. But it requires more sampling rate, and computational burden is also very high. Further, few analytical approaches were additionally developed to discriminate symmetrical fault from power swing. Some of them are autoregression analysis [8], moving average technique [9], transient monitor index-based method [10], phase space method [11] and Teager–Kaiser energy operator-based method [12]. In these methods, the threshold requires to discriminate the required events is system dependent and may fail during different critical situations like high-resistance fault, with presence of noise in input signal and under varying fault location. A wide area measurement-based technique is proposed in [13]. Furthermore, Teager–Kaiser energy operator combined with HHT in [14] and zero filtering technique using Hilbert transform [15] can detect symmetrical fault from swing. However, they are suitable and have high computational complexity. The review of all the techniques and the merits and demerits is described clearly in [16].
The paper presents a novel approach by which symmetrical fault can be easily and accurately discriminated from power swing that is proposed. The method uses superimposed current signal to estimate the RMS value. For study, the WSCC 9-bus test system is considered and simulated using EMTDC/PSCAD software. For result analysis, the influence of high fault resistance and the effect of variation of fault distance on the response of proposed method are considered. Results show that the proposed method provides accurate results of different fault cases, and the speed of operation is high irrespective of the severity of the event.
The paper is organized as follows: Sect. 2 briefly discusses the proposed methodology and Sect. 3 provides the result analysis part followed by conclusions in Sect. 4.
2 Proposed Methodology
A novel technique is implemented to detect symmetrical fault during power swing which is proposed using superimposed current components of three-phase signals. This technique utilizes three-phase current signals at relay end, and then the superimposed components are estimated. One-cycle superimposed current components are utilized to estimate the RMS index which helps to distinguish the fault from swing phenomenon.
2.1 Superimposed Current Component (SCC)
One-cycle superimposed current signal can be estimated using two consecutive cycles as (1)
where \( I_{{{\text{scc}}_{n} }} \) and In denote the set of superimposed current components and measured current signal for nth phase, suffix n represents the phases A, B and C, respectively, k represents the (2 N)th sampling instant, and N specifies the number of samples over one cycle.
One-cycle superimposed current signal is then used to estimate the RMS index.
2.2 Root Mean Square (RMS) Index
For generating the RMS index using one-cycle superimposed current component, the index term of superimposed current components of nth phase (\( I_{{{\text{scc}}_{n} }} \) index’) is calculated by considering three successive samples from superimposed current component samples of nth phase as given in Eq. (2).
Each index value is iteratively updated until the termination criteria of end of each cycle. By considering the obtained index from Eq. (3), the RMS index can be calculated as
where \( I_{{{\text{scc}}_{n} }} {\text{rms}}\,{\text{index}} \) represents superimposed current components of nth phase signal. Using the RMS index as mentioned in Eq. (3), fault-swing discrimination task can be performed. The RMS index values of the superimposed current signal of each phase will be significantly higher during symmetrical fault and approximately zero during the swing phenomenon. But to avoid relay maloperation, a threshold (h) is selected to accomplish the detection and discrimination task correctly. As per the rule,
In order to validate the merit of the proposed method, response for different fault and swing cases is tested considering standard power system model.
3 Simulation Results
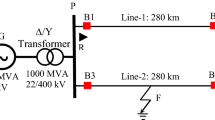
The efficacy of proposed method, three-phase fault detection during swing phenomenon, is tested for different fault situation by varying fault location and fault resistance. In this work, WSCC 9-bus system [17] shown in Fig. 1 is considered and simulated using EMTDC/PSCAD software. A distributed transmission line model with 50 Hz nominal frequency is considered for the study. The sampling rate of current signal is maintained at 1 kHz.

A 400 kV, 50 Hz WSCC 3-machine, 9-bus system
The performance of the proposed method is verified under swing phenomenon, symmetrical fault is initiated on line 9–6 at 1.0 s, and breakers ‘B3’ and ‘B4’ are opened (at 1.3 and 1.45 s) to clear the fault. As a consequence, the relay observes stable and unstable swing. During such phenomena, the distance relay ‘R’ located at bus 7 needs to be blocked. When a symmetrical fault occurs during either stable or unstable power swing, then the relay R should be unblocked to detect the fault.
3.1 Result for Symmetrical Fault During Stable and Unstable Power Swing
To validate the performance of the proposed method under fault during stable and unstable power swing, a three-phase fault is initiated on the line 7–8 at 4.85 s. The response of this method is illustrated in Figs. 2 and 3. From Figs. 2a and 3a, it is observed that the relay R experiences stable and unstable power swings in the current signals. Also observed that the maximum swing frequencies are 0.7 Hz for stable and 6.6 Hz for unstable. Conversely, the proposed RMS index is computed and compared with the fixed threshold ‘h’. During stable and unstable power swings, the index is well below the threshold ‘h’ and exceeds the threshold during three-phase fault as observed from Figs. 2b and 3b. Symmetrical fault is detected at 4.854 s during stable swing and at 4.856 s during unstable swing. Thereafter, the relay R generates a TRIP command as shown in Figs. 2c and 3c to the corresponding circuit breaker, respectively. This clearly demonstrates the effectiveness of the proposed method.

Result of three-phase fault detection during the stable power swing (0.7 Hz), a three-phase current signal, b RMS index values and c relay output

Result of three-phase fault detection during the unstable power swing (6.6 Hz), a three-phase current signals, b RMS index values and c relay output
3.2 Result for Close-in Symmetrical Fault During Power Swing
To elucidate the performance of the proposed method under close-in symmetrical fault during the power swing, a three-phase fault is simulated at 10 km from relay R with fault inception time of 4.68 s. The results are shown in Figs. 4 and 5.

Result of close-in symmetrical fault under stable swing, a three-phase current signals, b RMS index values and c relay output

Result of close-in symmetrical fault under unstable swing, a three-phase current signals, b RMS index values and c relay output
The magnitudes of the three-phase fault currents that measured at the relay location significantly differ from swing condition as shown in Figs. 4a and 5a. During symmetrical fault, the proposed index value is large enough as compared with the swing scenario. This identifies and discriminates the symmetrical fault and swing condition. From Figs. 4b and 5b, it is disclosed that the fault is accurately detected during both stable and unstable swing at 4.684 and 4.686 s, respectively. Accordingly, the corresponding TRIP signals are initiated to clear the fault as shown in Figs. 4c and 5c. From the result, it is concluded that the fault detection is achieved within a half cycle.
3.3 Result for Far-End Symmetrical Fault During Power Swings
To assess the presentation of proposed technique at far-end symmetrical fault case during power swing, a three-phase fault is created at 85% of the line between the buses 7–8 at 3.35 s. The output for this case is depicted in Figs. 6 and 7.

Result of far-end symmetrical fault under stable swing, a three-phase current signals, b RMS index values and c relay output

Result of far-end symmetrical fault under unstable swing, a three-phase current signals, b RMS index values and c relay output
From Figs. 6a and 7a, it is observed that the relay R measures the three-phase current signals under far-end three-phase fault during stable and unstable power swing. Figures 6b and 7b represent the proposed RMS index computation and compared with the threshold ‘h’. Also, it is noticed that the index value lies below the specified value during stable and unstable power swing, whereas it exceeds the specified value during a three-phase fault. Therefore, symmetrical fault is detected at 3.356 s during stable swing and at 3.357 s during unstable swing. Later, the relay R generates a TRIP command as shown in Figs. 6c and 7c. Thus, the proposed method gives an accurate fault detection within a half cycle after fault initiation.
3.4 Impact of High-Resistance Symmetrical Faults During Power Swing
To check the validity of the proposed method for this case, a symmetrical fault with 500 ohms high fault resistance is considered during a power swing condition.
The fault is incepted at 5.5 s during swing with a distance of 50 km from relay end. The assessment results of the presented method are shown in Figs. 8 and 9, respectively. From Figs. 8a and 9a, it is shown that the relay R measures the current signals at high-resistance fault during power swing with stable and unstable condition. Conversely, the proposed RMS index is computed and compared with the fixed threshold ‘h’. During stable and unstable power swing, the index lies below the threshold ‘h’ and exceeds the threshold ‘h’ during three-phase fault as observed from Figs. 8b and 9b. The symmetrical fault is detected at 5.505 s during stable swing and at 5.506 s during unstable swing. Thereafter, the relay R generates a TRIP command to the corresponding circuit breaker as shown in Figs. 8c and 9c. In this regard, proposed method is able to detect the symmetrical fault within a half cycle after fault inception during the power swing.

Result of high-resistance fault during stable swing, a three-phase current signals, b RMS index values and c relay output

Result of high-resistance fault during unstable swing, a three-phase current signals, b RMS index values and c relay output
4 Conclusions
In this paper, a novel power swing-symmetrical fault discrimination approach is proposed which computes the superimposed current signal first, and using three consecutive values, an index is developed. Next, based on recursive window, one-cycle calculated indices are used to estimate the RMS index. This RMS index is a reliable index to detect symmetrical fault during power swing. The RMS index is negligible during power swing irrespective of swing frequency and significantly higher during symmetrical fault. The magnitude of this RMS index is influenced by fault location, fault resistance and fault inception time. From the reported results, it can be concluded that the method is fast as detection time is less than half cycle and reliable enough to accomplish the assign task. The method is very simple, reliable and fast, and as it is based on recursive window, the future study will be performed to check the performance of the method is other dependable situations so that it can be tested in a real power networks.
References
Power System Relay Committee (2005) Power swing and out-of-step considerations on transmission lines. IEEE PSRC Working Group D6, New York
Kundur P (1994) Power system stability and control. Tata McGraw-Hill, New York
Brahma SM (2007) Distance relay with out-of-step blocking function using wavelet transform. IEEE Trans Power Deliv 22(3):1360–1366
Dubey R, Samantaray SR (2013) Wavelet singular entropy based symmetrical fault-detection and out-of-step protection during power swing. IET Gener Transm Distrib 7(10):1123–1134
Lotfifard S, Faiz J, Kezunovic M (2010) Detection of symmetrical faults by distance relays during power swings. IEEE Trans Power Deliv 25(1):81–87
Mahamedi B, Zhu J (2012) A novel approach to detect symmetrical faults occurring during power swing using frequency components of instantaneous three-phase active power. IEEE Trans Power Deliv 27(3):1368–1375
Rao JG, Pradhan AK (2016) Accurate phasor estimation during power swing. IEEE Trans Power Deliv 31(1):130–137
Rao JG, Pradhan AK (2012) Differential power-based symmetrical fault detection during power swing. IEEE Trans Power Deliv 27(3):1557–1564
Rao JG, Pradhan AK (2015) Power swing detection using moving averaging of current signals. IEEE Trans Power Deliv 30(1):368–376
Khodaparast J, Khederzadeh M (2015) Three-phase fault detection during power swing by transient monitor. IEEE Trans Power Syst 30(5):2558–2565
Dubey R, Samantaray SR, Panigrahi BK, Venkoparao VG (2016) Phase-space based symmetrical fault detection during power swing. IET Gener Transm Distrib 10(8):1947–1956
Kumar J, Jena P (2017) Solution to fault detection during power swing using Teager–Kaiser energy operator. Arab J Sci Eng 42:1–11
Kundu P, Pradhan AK (2014) Wide area measurement based protection support during power swing. Int J Elect Power Energy Syst 63:546–554
Biswal S, Biswal M (2018) Fault-swing discrimination using Hilbert-hung transform integrated discrete Teager-Kaiser energy operator. IET Sci Meas Technol 12(7):829–837
Prabhu MS, Nayak PK, Pradhan G (2018) Detection of three-phase fault during power swing using zero frequency filtering. Int Trans Electr Energy Syst 1–15
Andanapalli K, Nagaraju KV, Biswal M (2018) Symmetrical fault detection during power swing: a comparative study. In: Proceedings of the EECCMC international conference on electrical, electronics, computers, communication, mechanical and computing
Nayak PK, Pradhan AK, Bajpai P (2013) A fault detection technique for the series compensated line during power swing. IEEE Trans Power Deliv 28(2):714–722
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Andanapalli, K.R., Biswal, M. (2020). Symmetrical Fault—Swing Discrimination Using RMS Index-Based Superimposed Current Signals. In: Mehta, A., Rawat, A., Chauhan, P. (eds) Advances in Electric Power and Energy Infrastructure. Lecture Notes in Electrical Engineering, vol 608. Springer, Singapore. https://doi.org/10.1007/978-981-15-0206-4_2
Download citation
DOI: https://doi.org/10.1007/978-981-15-0206-4_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-0205-7
Online ISBN: 978-981-15-0206-4
eBook Packages: EngineeringEngineering (R0)