
Abstract
In this work, integration by parts formulas for variable-order fractional operators with Mittag-Leffler kernels are presented and applied to study constrained fractional variational principles involving variable-order Caputo-type Atangana–Baleanu’s derivatives, where the variable-order fractional Euler–Lagrange equations are investigated. A general formulation of fractional Optimal Control Problems (FOCPs) and a solution scheme for such class of systems are proposed. The performance index of a FOCP is taken into consideration as function of state as well as control variables.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

1 Introduction
Fractional calculus represents a generalization of the classical differentiation and integration of nonnegative integer order to arbitrary order. This type of calculus has recently gained its importance and popularity because of the significant and interesting results which were obtained when fractional operators were utilized to model real-world problems in diversity of fields, e.g., physics, engineering, biology, etc. [1, 6, 12,13,14, 16, 23,24,25,26,27,28,29,30,31, 35, 37,38,39, 42, 43, 46, 47].
The Lagrangian and Hamiltonian mechanics are an alternate of the standard Newtonian mechanics. They are important because they can be used for the sake of solving any problem in the traditional mechanics. It is worth mentioning that in the Newtonian mechanics, the conception of force is needed. While, in the Lagrangian and Hamiltonian systems, the terms of energy are required.
Riewe [44, 45] was the first to consider the Lagrangian and Hamiltonian for a given dissipative system in the frame of fractional operators. Agarwal and Baleanu made significant contributions to the concept of fractional variational principles in [2,3,4,5, 19, 21].
In [2, 4, 20, 21, 40, 41], variety of optimization problems embodying constant order fractional control problems were considered. In [2, 4], the author proposed a general formulation for fractional optimal control problems and presented a solution scheme for such problems. This formulation was based on variation principles and Lagrange multipliers technique. In [40, 41], the authors extended the classical control theory to diffusion equations involving fractional operators in a bounded domain with and without a state constraints. These works were advanced in to a larger family of fractional optimal control systems containing constant orders in [11, 17]. Other contributions to this field were discussed in [18, 32, 33] and the references therein. Nevertheless, to the last extent of our knowledge, the area of calculus of variations and optimal control of fractional differential equations with variable order has been paid less attention than the case where fractional derivatives with constant orders. (see [15, 22, 36, 37]). This work is an attempt to fill this gap.
Motivated by what was mentioned above, we discuss the Lagrangian and Hamiltonian formalism for constrained systems in the presence of fractional variable order in this work.
Recently, in order to overcome the disadvantage of the existence of the singular kernels involved in the traditional fractional operators, Atangana and Baleanu [8] proposed a derivative with fractional order. The kernel involved in this derivative is nonlocal and nonsingular. Many researches have considered several applications on this fractional derivative (see e.g [7, 9, 48] and the references therein).
In this study, we use the aforementioned fractional derivative with variable order and propose to generalize the concept of equivalent Lagrangian for the fractional case. For a certain class of classical Lagrangian, there are several techniques to find the Euler–Lagrange equations and the associated Hamiltonians. However, the fractional dynamics depending on the fractional derivatives are used to construct the Lagrangian to begin with. Therefore, the existence of several options can be utilized to deal with a certain physical system. From this point of you, applications of the fractional derivative proposed by Atangana and Baleanu to the fractional dynamics may adduce new advantages in studying the constrained systems primarily because of the fact that there exist left and right derivatives of this kind. Addition, the fractional derivative of a function is given by a definite integral and it depends on the values of the function over the entire interval. Therefore, the fractional derivatives proposed are suitable to model systems with long-range interactions in space and/or time (memory) and process with many scales of space and/or time involved.
This work is organized as follows: In Sect. 2, we go over some concepts and definitions, and then we present the integration by parts formula in the framework of variable-order Atangana–Baleanu fractional time derivative. Section 3 includes a tabloid review of the fractional Lagrangian and Hamiltonian approaches in the frame of the proposed variable-order fractional derivatives and some detailed examples. In Sect. 4, we discuss constrained systems in the frame of the proposed derivative and investigate some example in details. In Sect. 5, the Fractional Optimal Control Problem (FOCP) is presented. Section 6 is dedicated to our conclusions.
2 Preliminaries
In this section, we present some definitions and notions related to Atangana–Baleanu fractional derivatives.
Let \(L^2(\varOmega )\) be the usual Hilbert space fitted to the scalar product (., .) and let \(H^m(\varOmega )\), \(H^m_ 0 (\varOmega )\) denote the usual Sobolev spaces.
First, lets recall the Mittag-Leffler function \(E_{\alpha (x),\beta }(u)\) for variable \(\alpha (x) \in (0,1)\) that is used in a great scale in this work and given below
where \(\varGamma (.)\) denotes the Gamma function defined as
It can be easily noticed that the exponential function is a particular case of the Mittag-Leffler function. In fact,
A more generalized form of the Mittag-Leffler function is the Mittag-Leffler function with three parameters defined as
where, \((\lambda )_{k}\) denotes the familiar Pochhammer symbol.
First of all, we present a new approach in defining variable-order Riemann–Liouville fractional integrals different from those in [10].
Definition 1
Let \(\phi (x)\) be an integrable defined on an interval [a, b] and a let \(\alpha (x)\) be function such that \(0<\alpha (x)\le 1\). We define the left Riemann–Liouville fractional integral of order \(\alpha (x]\) as
and
In the right case, we have
and
To define fractional integral type operators with variable order, we follow [34].
Definition 2
Similarly, we define the right generalized fractional integral as
We define the following operators as well:
and
Now, we present the definitions of the fractional integrals and derivatives of variable order in the point of view of Atangana–Baleanu [7].
Definition 3
For a given function \(u\in H^{1}(a, b), b > a\), \(\alpha (x) \in (0,1)\), the Atangana–Baleanu fractional integrals (AB integral) of variable order \(\alpha (x)\) of a given function \(u\in H^{1}(a, b), b>x> a\) (where A denotes Atangana, B denotes Baleanu) with base point a is defined at a point \(x\in (a, b)\) by
and
and
Once one takes \(\alpha (x) =0\) in (9), (10) we recover the initial function and when \(\alpha (x) =1\) is considered in (9), (10) we recover the ordinary integral.
The Atangana–Baleanu fractional derivatives in the Riemann–Liouville sense (ABR derivative) of variable order \(\alpha (x)\) for a given function \(\varphi (x)\in H^{1}(a, b), b>x> a\) (where R denotes Riemann) with base point a is defined at a point \(x\in (a, b)\) by
and the Caputo Atangana–Baleanu fractional derivatives (ABC derivative) of variable order \(\alpha (x)\) for a given function \(\varphi (x)\in H^{1}(a, b), b>x> a\) (where C denotes Caputo) with base point a is defined at a point \(x\in (a, b)\) by




Remark 1
If one replace \(\alpha (x)\) in (5) and (6) by \(\alpha (x-s)\) and replaces each \(\alpha (s)\) in (7) and (8) by \(\alpha (x-s)\), then the ABR and ABC fractional derivatives with variable order can be expressed in the convolution form. Analogously, if one replaces \(\alpha (x)\) in (9) and (10) by \(\alpha (x-s)\) and replaces each \(\alpha (s)\) in (11) and (12) by \(\alpha (x-s)\), then the second part of the AB fractional integrals with variable order can be expressed in the convolution form.
Lemma 1
For functions u and v defined on [a, b] and \(0<\alpha (x)\le 1\) we have
Proof
Using Definition 1 and changing the order of integration, we have
On the other side, again using Definition 1 and changing the order of integrations, we get
Now, benefiting from Lemma 1 we can show that the following integration by parts formulas hold.
Theorem 1
(Integration by parts for AB fractional integrals) Let \(\alpha (x)>0,\, p\ge 1,\, q\ge 1\), and \(\frac{1}{p}+\frac{1}{q}\le 1+\alpha (x)\) for all t. Then for any \(u(x)\in L^{p}(a,b),v(x)\in L^q(a,b)\), we have
Proof
From Definition 3 and by applying the first part of Lemma 1, we have
The proof of the formula in (24) can be done similarly, once we use the second part of Lemma 1.
Lemma 2
Let u(x) and v(x) be functions defined on [a, b] and let \(0<\alpha (x)\le 1\). Then, we have
Proof
The proof can be executed using some definitions and changing the order of integrations. In fact, we have
\(\displaystyle \int _a^b u(x)\mathbf E _{\alpha (x), 1, \frac{-\alpha (x)}{1-\alpha (x)},a^+}v(x) dx\)
\(\displaystyle =\int _a^b u(x) \frac{B(\alpha (x))}{1-\alpha (x)} \left( \int _a^x v(s) E_{\alpha (x)}(\frac{-\alpha (x)}{1-\alpha (x)} (x-s)^{\alpha (x)})ds\right) dx\)
\(\displaystyle = \int _a^b v(s) \left( \int _s^b \frac{B(\alpha (x))}{1-\alpha (x)} E_{\alpha (x)}(\frac{-\alpha (x)}{1-\alpha (x)} (x-s)^{\alpha (x)})u(x)dx\right) ds\)
\(\displaystyle =\int _a^b v(s) \mathscr {E}_{\alpha (s), 1, \frac{-\alpha (s)}{1-\alpha (s)},b^-}u(s) ds\).
The formula in (26) can proved similarly.
Theorem 2
Let u(x) and v(x) be functions defined on [a, b] and let \(0<\alpha (x)\le 1\). We have



and

Proof
The proof follows from Definition 3, Lemma 2 and the classical integration by parts. Bellow, we prove (27) only. The proofs of the rest of the formulas are analogous. Actually, using Definition 3 and applying the first part of Lemma 2 and the traditional integration by parts, we have

3 Fractional Variational Principles in the Frame of Variable-Order Fractional Atangana–Baleanu’s Derivatives
In this section, we present Euler–Lagrange and fractional Hamilton equations in the frame of the fractional variable-order Atangana–Baleanu derivatives are.
Theorem 3
Let J[z] be a functional of the form

defined by the set of functions which have continuous variable-order Atangana–Baleanu fractional derivative in the Caputo sense on the set of order \(\alpha (x)\) in [a, b] and which satisfy the boundary conditions \(z(a)=z_{a}\) and \(z(b)=z_{b}\). Then a necessary condition for J[z] to have a maximum for given function z(x) is that z(x) must satisfy the following Euler–Lagrange equation:

Proof
To obtain the necessary conditions for the extremum, we assume that \(z^{*}(x)\) is the desired function. Let \(\varepsilon \in R\) define a family of curves
where, \(\eta (t)\) is an arbitrary curve except that it satisfies the homogeneous boundary conditions; that is
To obtain the Euler–Lagrange equation, we substitute equation (34) into Eq. (32) and differentiate the resulting equation with respect to \(\varepsilon \) and set the result to 0. This leads to the following condition for extremum:

Using Eqs. (30), (36) can be written as

We call  , the natural boundary condition. Now, since \(\eta (x)\) is arbitrary, it follows from a well established result in calculus of variations that
, the natural boundary condition. Now, since \(\eta (x)\) is arbitrary, it follows from a well established result in calculus of variations that

Equation (38) is the Generalized Euler–Lagrange Equation GELE for the Fractional Calculus Variation (FCV) problem defined in terms of the variable-order Atangana–Baleanu Fractional Derivatives ABFD. Note that the Atangana–Baleanu derivatives in the Caputo and Riemann–Liouville sense appears in the resulting differential equations.
Example 1
Consider the following Lagrangian:

then independent fractional Euler–Lagrange equation (38) is given by

Example 2
We consider now a fractional Lagrangian of the oscillatory system

where m the mass and k is constant. Then the fractional Euler–Lagrange equation is

This equation reduces to the equation of motion of the harmonic oscillator when \(\alpha (x) \rightarrow 1\).
3.1 Some Generalizations
In this section, we extend the results obtained in give some Theorem 3.1 to the case of n variables \(z_1(x), z_2(x),..., z_n(x)\). We denote by \(\mathscr {F}_n\) the set of all functions which have continuous left ABC fractional derivative of order \(\alpha (x)\) and right ABC fractional derivative of order \(\beta \) for \(x\in [a, b]\) and satisfy the conditions
The problem can be defined as follows: find the functions \(z_1,z_2,...,z_n\) from \(\mathscr {F}_n\), for which the functional

has an extremum, where \(L(x,z_1,...,z_n,y_1,...,y_n,w_1,...,w_n)\) is a function with continuous first and second partial derivatives with respect to all its arguments. A necessary condition for \(J[z_1,z_2,...,z_n]\) to admit an extremum is that \(z_1(x), z_2(x),..., z_n(x)\) satisfy Euler–Lagrange equations:

Example 3
Lets consider the system of two planar pendula, both of length l and mass m, suspended from the same distance apart on a horizontal line so that they are moving in the same plane. The fractional counter part of the Lagrangian is 

To obtain the fractional Euler–Lagrange equation, we use

It follows that

These equation reduces to the equation of motion of the harmonic oscillator when \(\alpha (t) \rightarrow 1\).
4 Fractional Variational Principles and Constrained Systems in the Frame of Variable-Order Atangana–Baleanu’s Derivatives
Lets now consider the following problem: Find the extremum of the functional

subject to the dynamical constraint

with the boundary conditions
In this case, we define the functional
where

and \(\lambda \) is the Lagrange multiplier. Then Eq. (38) in this case takes the form

which can be written as

Example 4
Lets consider

with the boundary conditions
Then we have

where \(\lambda _1, \lambda _2\) are the Lagrange multipliers. Then Eq. (48) takes the form

5 Fractional Optimal Control Problem Involving Variable-Order Atangana–Baleanu’s Derivatives
Find the optimal control v(t) for a that minimizes the performance index
subject to the dynamical constraint

with the boundary conditions
where z(x) is the state variable, x represents the time, and F and G are two arbitrary functions. Note that Eq. (51) may also include some additional terms containing state variables at the end point. This term in not considered here for simplicity. When \(\alpha (x) = 1\), the above problem reduces to the standard optimal control problem. To find the optimal control we follow the traditional approach and define a modified performance index.
Lets define the functional

where \(\lambda \) is the Lagrange multiplier. The variations of Equation (54) give


where \(\delta z(0) = 0\) or \(\lambda (0) = 0\), and \(\lambda z(1) = 0\) or \(\lambda (1) = 0\). Because z(0) is specified, we have \(\delta z(0) = 0\), and since z(1) is not specified, we require \(\lambda (1)=0\). Using these assumptions, Eqs. (55) and (56) become

Since \({\mathscr {J}}[v]\) and consequently J(v)) is minimized, \(\delta z, \delta v\), and \( \delta \lambda \) in Eq. (57) are all equal to zero. This gives

and
Observe that Eq. (58) contains Left Atangana–Baleanu in Caputo sense FD, whereas Eq. (59) contains Right Atangana–Baleanu in Caputo FD. This clearly indicates that the solution of optimal control problems requires knowledge of not only forward derivatives but also backward derivatives to count on the end conditions. In classical optimal control theories, this issue is either not discussed or they are not clearly stated. This is largely because the backward derivative of order 1 turns out to be the negative of the forward derivative of order 1.
Example 5
Consider
where \(a(x)\ge 0\), \(b(x)> 0\), and,

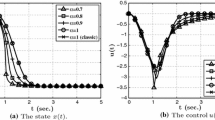
This linear system for \(\alpha (t)= 1\) and \(0< \alpha (t)< 1\) was considered before in the literature and formulations and solution schemes for this system within the traditional Riemann–Liouville and Caputo derivatives are addressed in many books and articles (see e.g. [2, 3]. Here, we discuss the same problem in the framework of Atangana–Baleanu fractional derivatives. For \(0< \alpha (t)< 1\), the Euler–Lagrange Equations (58) to (60) gives (63) and
and

Thus, z(x) and \(\lambda (x)\) can be computed from (64) and (66).
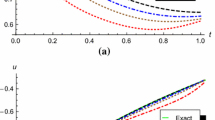
Example 6
Consider the following time-invariant problem.
Find the control v(x) which minimizes the quadratic performance index
subject to

and the initial condition
Note that from (5), we have
and
6 Conclusions
In this work, we have tackled some types of optimal control problems in the presence of the newly proposed nonlocal and nonsingular fractional derivatives that involve Mittag-Leffler functions as kernels. In order to obtain Euler–Lagrange equations, we exploited the techniques mentioned in several books and the fractional integration by parts formulas. It turned out, the formulation shewed and the obtained equations are analogous with the ones when the classical variation principles are used; but with slight differences. That is, all the concepts of the classical calculus of variation can be carried to fractional calculus of variation in the frame of either the traditional fractional operators with singular kernels or the newly defined operators involving nonsingular kernel. However, since there is a little advance that has been done in the theory of fractional operators with variable order, there is no big progress in the calculus of variation in the presence of such operators. Therefore, we believe in the need of tackling such operators and that this work may initiate the interest of researches and them as they can also be used in modeling some problems considered in various fields of sciences.
References
Abdeljawad, T., Baleanu, D.: Integration by parts and its applications of a new nonlocal fractional derivative with Mittag-Leffler nonsingular kernel. J. Nonlinear Sci. Appl. 10, 1098–1107 (2017)
Agrawal, O.P.: Formulation of Euler-Lagrange equations for fractional variational problems. J. Math. Anal. Appl. 272, 368–379 (2002)
Agrawal, O.P.: A general formulation and solution scheme for fractional optimal control problems. Nonlinear Dyn. 38, 323–337 (2004)
Agrawal, O.P., Baleanu, D.: Hamiltonian formulation and direct numerical scheme for fractional optimal control problems. J. Vib. Control 13(9–10), 1269–1281 (2007)
Agarwal, R.P., Baghli, S., Benchohra, M.: Controllability for semilinear functional and neutral functional evolution equations with infinite delay in Frechet spaces. Appl. Math. Optim. 60, 253–274 (2009)
Ahmad, B., Ntouyas, S.K.: Existence of solutions for fractional differential inclusions with four-point nonlocal Riemann-Liouville type integral boundary conditions. Filomat 27(6), 1027–1036 (2013)
Atangana, A.: Non validity of index law in fractional calculus: A fractional differential operator with Markovian and non-Markovian properties. Phys. A. 505, 688–706 (2018)
Atangana, A., Baleanu, D.: New fractional derivatives with non-local and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20(2), 763–769 (2016)
Atangana, A., Gomez-Aguilar, J.F.: Decolonisation of fractional calculus rules: breaking commutativity and associativity to capture more natural phenomena. Eur. Phys. J. Plus 133, 166 (2018)
Atanackovic, T.M., Pilipovic, S.: Hamilton’s principle with variable order fractional derivatives. Fract. Calc. Appl. Anal. 14(1), 94–109 (2011)
Bahaa, G.M.: Fractional optimal control problem for variational inequalities with control constraints. IMA J. Math. Control Inform. 33(3), 1–16 (2016)
Bahaa, G.M.: Fractional optimal control problem for differential system with control constraints. Filomat 30(8), 2177–2189 (2016)
Bahaa, G.M.: Fractional optimal control problem for infinite order system with control constraints. Adv. Differ. Equ. (2016). https://doi.org/10.1186/s13662-016-0976-2
Bahaa, G.M.: Fractional optimal control problem for differential system with delay argument. Adv. Differ. Equ. (2017). https://doi.org/10.1186/s13662-017-1121-6
Bahaa, G.M.: Fractional optimal control problem for variable-order differential systems. Fract. Calc. Appl. Anal. 20(6), 1447–1470 (2017)
Bahaa, G.M., Tang, Q.: Optimal control problem for coupled time-fractional evolution systems with control constraints. J. Differ. Equ. Dyn. Syst. (2017). https://doi.org/10.1007/s12591-017-0403-5
Bahaa, G.M., Tang, Q.: Optimality conditions for fractional diffusion equations with weak Caputo derivatives and variational formulation. J. Fract. Calc. Appl. 9(1), 100–119 (2018)
Baleanu, D., Agrawal, O.P.: Fractional Hamilton formalism within Caputo’s derivative. Czech. J. Phys. 56(10–11), 1087–1092 (2000)
Baleanu, D., Avkar, T.: Lagrangian with linear velocities within Riemann-Liouville fractional derivatives. Nuovo Cimnto B 119, 73–79 (2004)
Baleanu, D., Jajarmi, A., Hajipour, M.: A new formulation of the fractional optimal control problems involving Mittag-Leffler nonsingular kernel. J Optim. Theory. Appl. 175, 718–737 (2017)
Baleanu, D., Muslih, S.I.: Lagrangian formulation on classical fields within Riemann-Liouville fractional derivatives. Phys. Scr. 72(2–3), 119–121 (2005)
Bota, C., Caruntu, B.: Analytic approximate solutions for a class of variable order fractional differential equations using the polynomial least squares method. Fract. Calc. Appl. Anal. 20(4), 1043–1050 (2017)
Djida, J.D., Atangana, A., Area, I.: Numerical computation of a fractional derivative with non-local and non-singular kernel. Math. Model. Nat. Phenom. 12(3), 4–13 (2017)
Djida, J.D., Mophou, G.M., Area, I., Optimal control of diffusion equation with fractional time derivative with nonlocal and nonsingular mittag-leffler kernel (2017). arXiv:1711.09070
El-Sayed, A.M.A.: On the stochastic fractional calculus operators. J. Fract. Calc. Appl. 6(1), 101–109 (2015)
Frederico Gastao, S.F., Torres Delfim, F.M.: Fractional optimal control in the sense of Caputo and the fractional Noether’s theorem. Int. Math. Forum 3(10), 479–493 (2008)
Gomez-Aguilar, J.F.: Space-time fractional diffusion equation using a derivative with nonsingular and regular kernel. Phys. A. 465, 562–572 (2017)
Gomez-Aguilar, J.F., Atangana, A., Morales-Delgado, J.F.: Electrical circuits RC, LC, and RL described by Atangana-Baleanu fractional derivatives. Int. J. Circ. Theor. Appl. (2017). https://doi.org/10.1002/cta.2348
Gomez-Aguilar, J.F.: Irving-Mullineux oscillator via fractional derivatives with Mittag-Leffler kernel. Chaos Soliton. Fract. 95(35), 179–186 (2017)
Hafez, F.M., El-Sayed, A.M.A., El-Tawil, M.A.: On a stochastic fractional calculus. Frac. Calc. Appl. Anal. 4(1), 81–90 (2001)
Hilfer, R.: Applications of Fractional Calculus in Physics. Word Scientific, Singapore (2000)
Jarad, F., Maraba, T., Baleanu, D.: Fractional variational optimal control problems with delayed arguments. Nonlinear Dyn. 62, 609–614 (2010)
Jarad, F., Maraba, T., Baleanu, D.: Higher order fractional variational optimal control problems with delayed arguments. Appl. Math. Comput. 218, 9234–9240 (2012)
Kilbas, A.A., Saigo, M., Saxena, K.: Generalized Mittag-Leffler function and generalized fractional calculus operators. Int. Tran. Spec. Funct. 15(1), 31–49 (2004)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J., Theory and Application of Fractional Differential Equations. North Holland Mathematics Studies, vol. 204. Amsterdam (2006)
Liu, Z., Zeng, S., Bai, Y.: Maximum principles for multi-term space-time variable-order fractional diffusion equations and their applications. Fract. Calc. Appl. Anal. 19(1), 188–211 (2016)
Lorenzo, C.F., Hartley, T.T.: Variable order and distributed order fractional operators. Nonlinear Dyn. 29, 57–98 (2002)
Machado, J.A.T., Kiryakova, V., Mainardi, F.: Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 16(3), 1140–1153 (2011)
Magin, R.L.: Fractional Calculus in Bioengineering. Begell House Publishers, Redding (2006)
Mophou, G.M.: Optimal control of fractional diffusion equation. Comput. Math. Appl. 61, 68–78 (2011)
Mophou, G.M.: Optimal control of fractional diffusion equation with state constraints. Comput. Math. Appl. 62, 1413–1426 (2011)
Ozdemir, N., Karadeniz, D., Iskender, B.B.: Fractional optimal control problem of a distributed system in cylindrical coordinates. Phys. Lett. A 373, 221–226 (2009)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Riewe, F.: Nonconservative Lagrangian and Hamiltonian mechanics. Phys. Rev. E 53, 1890–1899 (1996)
Riewe, F.: Mechanics with fractional derivatives. Phys. Rev. E 55, 3581–3592 (1997)
Ross, B., Samko, S.G.: Integration and differentiation to a variable fractional order. Integr. Transform. Spec. Funct. 1, 277–300 (1993)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives: Theory and Applications. Gordon and Breach, Yverdon (1993)
Tateishi, A.A., Ribeiro, H.V., Lenzi, E.K.: The role of fractional time-derivative operators on anomalous diffusion. Front. Phys. 5, 1–9 (2017)
Acknowledgements
The second author would like to thank Prince Sultan University for funding this work through research group Nonlinear Analysis Methods in Applied Mathematics (NAMAM) group number RG-DES-2017-01-17.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bahaa, G.M., Abdeljawad, T., Jarad, F. (2019). On Mittag-Leffler Kernel-Dependent Fractional Operators with Variable Order. In: Daftardar-Gejji, V. (eds) Fractional Calculus and Fractional Differential Equations. Trends in Mathematics. Birkhäuser, Singapore. https://doi.org/10.1007/978-981-13-9227-6_3
Download citation
DOI: https://doi.org/10.1007/978-981-13-9227-6_3
Published:
Publisher Name: Birkhäuser, Singapore
Print ISBN: 978-981-13-9226-9
Online ISBN: 978-981-13-9227-6
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)