
Abstract
Position difference, Doppler observation and time-differenced carrier phase (TDCP) are three commonly used velocity estimation methods. Since the average velocity of two epochs is obtained both in the position difference and TDCP velocity estimation, the accuracy is affected by the carrier’s kinematics, large deviation will appear in high dynamic velocity estimation field. While the carrier’s real velocity can be obtained in real time utilize the Doppler velocity estimation method, consequently, this method is widely adopted in navigation fields such as vehicle, shipboard and airborne. The accuracy of Doppler velocity estimation will be affected by positioning error through the direction cosine matrix between the receiver and satellite, therefore, high precision position information is the premise to obtain the accurate carrier velocity. The principle of heterogeneous constellations based BDS PPP Doppler velocity estimation is proposed in this paper, and the influence of various errors on the velocity estimation accuracy is analyzed. Based on the high precision position estimated by BDS PPP, the Doppler velocity estimation method is analyzed. The static experimental results show that the velocity estimation accuracy based on BDS PPP position difference is mm/s level, while the Doppler velocity estimation accuracy is cm/s level. In the vehicle dynamic experiment, the velocity estimation results are compared with high precision GNSS/INS integrated navigation results. The results show that the coincidence between the BDS PPP Doppler velocity estimation results and the integrated navigation is cm/s level, while the BDS PPP position difference based velocity estimation is significantly affected by carrier’s kinematics, and the coincidence with the integrated navigation results is dm/s level. The Doppler velocity estimation method is recommended in high dynamic applications, the position difference velocity estimation is recommended in low dynamic or low acceleration situations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
BeiDou Navigation Satellite System (BDS) is a self-constructed and independently operated satellite navigation system in China. Its positioning accuracy is better than 10 m, the velocity estimation is better than 0.2 m/s, and the timing is better than 50 ns [1]. High-precision velocity information is especially important in many areas such as autonomous driving [2], seismic monitoring [3], and GNSS/INS integrated navigation [4].
As for the research on BDS positioning method and precision [5], domestic and foreign scholars have done relatively few studies on BDS velocity estimation method and precision research. The satellite velocity estimation methods mainly include position differential velocity estimation, Doppler velocity estimation and TDCP velocity estimation [6, 7]. Position difference method and TDCP velocity estimation method obtain the average velocity between epochs, and the accuracy is subject to carrier motion. The influence of the state is large and cannot meet the accuracy requirements of the high maneuvering velocity estimation field. The Doppler velocity estimation method calculates the instantaneous velocity of the carrier by the original observation of the Doppler shift obtained by the receiver tracking loop in real time, of which the result is not affected by the motion state of the carrier.
In this paper, the principle of position difference and Doppler velocity estimation based on BDS PPP is given. The influence of various errors on the accuracy of velocity estimation and the correction method in Doppler velocity estimation method are analyzed. The two methods were analyzed by taking advantage of two sets of experimental data.
2 Principle and Error Analysis of BDS PPP Velocity Estimation
2.1 Principle of Position Differential Velocity Estimation
Assuming that the receiver sampling interval is \( \Delta t \), the velocity of the receiver at time \( t \) can be expressed as
Where \( {\mathbf{P}} \) is the position vector of the receiver. The velocity obtained by the above formula is the average between two epochs, and if \( \Delta t \) approaches zero, it is the instantaneous velocity.
2.2 Principle of Doppler Velocity Estimation
The linearized Doppler velocity equation can be expressed as:
where \( \lambda \) is the wavelength and BDS B1 carrier is 0.192 m. \( D_{k}^{j} \) is the original Doppler shift obtained by the receiver, \( {\mathbf{v}}^{j} \) stands for the satellite velocity vector, \( {\mathbf{v}}_{k} \) for the receiver velocity vector, \( c \) is the velocity of light in a vacuum, \( d\dot{\tau }_{k} \) and \( d\dot{\tau }^{j} \) represent the receiver clock drift and the satellite clock drift, respectively. \( \dot{I} \) is the ionospheric delay rate, \( \dot{T} \) is the tropospheric delay rate, \( \varepsilon \) is multipath and receiver noise, \( {\mathbf{e}}_{k}^{j} \) represents the directional cosine vector between the receiver and satellite and is given by:
where \( {\mathbf{r}}^{j} \) and \( {\mathbf{r}}_{k} \) represent the satellite and receiver positions, respectively.
It can be seen from Eqs. (1) and (2) that the three-dimensional velocity of the receiver and the receiver clock rate variability are four unknowns, and at least four satellites can be solved, and four or more satellites are solved by a least squares algorithm.
2.3 Error Analysis
The accuracy of the position differential velocity estimation method is mainly related to the positioning error and the motion state of the carrier. The Doppler velocity estimation method is mainly affected by satellite position and velocity error, receiver position error, ionospheric and tropospheric delay variation rate, relativistic effect, the satellite clock speed and the observation noise. The satellite clock difference can be corrected by broadcasting ephemeris parameters. Since the velocity estimation is completed in a short time, the influence of the rate of change of the ionosphere and the troposphere on the velocity estimation can be negligible.
2.3.1 Satellite Position and Velocity Error
The satellite position and velocity affect the velocity estimation result by the cosine vector of the station star direction. If the error of the BDS satellite position in the broadcast ephemeris is 36 m, the IGSO and the MEO are 10 m, the influence on the velocity estimation is 1–2 mm/s. Precise ephemeris can be used for calculation in post processing. The velocity of the broadcast ephemeris calculation satellite and the velocity of the precision ephemeris are within 1 mm/s, so the velocity of the satellite can be calculated in real time using the broadcast ephemeris.
Unlike GPS satellites, BDS satellites are heterogeneous constellations, including MEO, GEO, and IGSO. The calculation method of MEO and IGSO satellite velocity is the same as that of GPS satellite. The specific calculation formula can refer to the literature [8], and the GEO satellite orbital inclination is close to 0 degree. It needs to be calculated by coordinate rotation method. The specific calculation method is as follows. The meaning of each symbol can be referred to the literature [9].
-
(1)
Near-point angle change rate
-
(2)
Rate of change of the pitch angle of the ascending node
-
(3)
Corrected latitude change rate, corrected distance change rate, corrected orbital inclination change rate
-
(4)
Ascending node longitude change rate
-
(5)
The velocity of the satellite in the orbital plane coordinate system
-
(6)
The velocity of the satellite in the geocentric fixed-angle coordinate system
Where
\( {\dot{\mathbf{X}}} \) is the derivative of \( {\mathbf{X}} \).
2.3.2 Receiver Position Error
The receiver position error further affects the velocity estimation result by affecting the cosine vector of the station star direction. Using static data for simulation calculation, when the positioning error is 50 m, the effect on velocity can reach 1 cm/s. At present, the BDS single point positioning error is within 20 m, and the influence on the velocity estimation is on the order of mm/s. If the BDS PPP position result is used, the influence on the velocity estimation can be ignored.
2.3.3 Relativistic Effects
The relativistic effect is caused by the difference in the velocity of movement of the satellite clock and the receiver clock in the inertial space and the difference in gravity of the Earth [8]. The ranging error caused by relativity is:
Where \( a \) is the long axis of the satellite orbit; \( \mu \) is the Earth’s gravitational constant, and its value is \( \mu = 3.986004418 \times 10^{14} m^{3} /s^{2} \); \( e \) is the satellite orbital eccentricity; \( E \) is the near-point angle. The equation for the influence of relativity on the velocity estimation can be obtained from the above equation:
3 Analysis of the Experiment and Results
3.1 Static Experiment
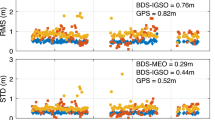
The static experiment is 50 min data collected on June 12, 2018 in an open place in Liaoyang City, Liaoning Province, with a sampling interval of 5 s. The average PDOP value is 2.83, and the number of satellites is 10. The true value of the velocity under static conditions is 0, and the calculated velocity value is the error. Figure 1 shows the error of the BDS PPP positioning result, and the positioning accuracy after convergence can reach cm level. Figures 2 and 3 show the BDS PPP position differential velocity estimation error and PPP-based Doppler velocity estimation error. Table 1 shows the error statistics of the two methods. It can be seen that the BDS PPP position differential velocity estimation method can achieve a velocity estimation accuracy of mm/s after the convergence of the positioning results. The accuracy of the Doppler velocity estimation method based on BDS PPP is cm/s, and the elevation direction is slightly worse than the horizontal direction. The relationship between the spatial positional accuracy factor and the three-dimensional velocity accuracy can be expressed as:

BDS PPP positioning error

BDS PPP position differential velocity estimation error

Doppler velocity estimation error based on BDS PPP
In the formula, \( M_{v} \) is the velocity estimation error; \( M_{\rho } \) is the sum of the errors of the error to the pseudo-range rate, and \( M_{\rho } \) can be calculated as 1.9 cm/s, indicating that the Doppler observation noise of this type of receiver is about 1.9 cm/s.
3.2 Dynamic Experiment
The land vehicle experiment was carried out in Fuxin City on 2017-06-07. The data acquisition time was 1 h 30 min and the data recording frequency was 1 Hz. Using the velocity result of the post-processing of the MP-POS520 integrated navigation device as a reference, the velocity estimation accuracy is 0.02 m/s. The experimental environment and trajectory are shown in Fig. 4. Figures 5 and 6 are the horizontal comparison of BDS PPP position differential velocity estimation (PPPvel), BDS PPP-based Doppler velocity estimation results (DOPvel) and POS520 velocity results. It can be seen that the BDS PPP-based Doppler velocity estimation results. Obviously better than the position differential velocity estimation results, Fig. 5 shows that the difference between the carrier velocity changes, the difference can reach several m/ s, and the Doppler velocity estimation results are not greatly affected. The two methods are different from the POS velocity results. The statistical results are shown in Table 2. It can be concluded that the Doppler velocity estimation based on BDS PPP and the high-precision POS velocity result are in the accuracy of cm/s, and the BDS PPP position differential velocity is consistent. The accuracy is at the dm/s level.

Experimental environment and trajectory

Position differential velocity comparison

Doppler velocity comparison
4 Conclusions
In this paper, the principle of position difference and Doppler velocity estimation based on BDS PPP is given. The influence of various errors on the accuracy of Doppler velocity estimation and the correction method are analyzed. Through static and sports car experiments, the BDS PPP position differential velocity estimation method and the BDS PPP-based Doppler velocity estimation method are compared and analyzed, turning out that the Doppler velocity estimation method is not affected by the carrier motion state, and the accuracy can reach cm/s level, but the position-difference velocity estimation method is greatly influenced by the motion state of the carrier, with the error even reaching several m/s under high maneuver. It is recommended to use the Doppler velocity estimation method in high dynamic applications, while position-difference velocity estimation method in low dynamic or low acceleration fields. With the continuous improvement of the BDS satellite system, the accuracy of the velocity estimation can be further improved.
References
The State Council Information Office of the People’s Republic of China: China’s BeiDou Navigation Satellite System. People’s Publishing House, Beijing
Yang F (2014) Development status and prospects of driverless cars. Shanghai Auto 3:35–40
Zhang XH, Guo BF (2013) Real-time tracking the instantaneous of crust during earthquake with a stand-alone GPS receiver. Chin J Geophys 56(6):1928–1936
Yan K, Zhang T, Niu X et al (2017) INS-aided tracking with FFT frequency discriminator for weak GPS signal under dynamic environments. GPS Solutions 3(21):917–926
Shi J, Huang Y, Ouyang C et al BeiDou/GPS relative kinematic positioning in challenging environments including poor satellite visibility and high receiver velocity. Surv Rev. https://doi.org/10.1080/00396265.2018.1537227
Sun W, Duan SL, Ding W et al (2017) Comparative analysis on velocity determination by GPS single point. J Navig Positioning 5(1):81–85
Freda P, Angrisano A, Gaglione S et al (2015) Time-differenced carrier phases technique for precise GNSS velocity estimation. GPS Solutions 2(19):335–341
Sun W, Duan SL, Kong Y et al (2017) Velocity and acceleration of doppler calculation for carrier based on GPS broadcast ephemeris. Chin J Sens Actuators 30(11):1630–1635
Li ZH, Huang JS (2012) GPS surveying and date processing. Wuhan University Press, Wuhan
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Duan, S., Sun, W., Shi, J., Ouyang, C. (2019). Analysis of Velocity Estimation Methods Based on BDS PPP. In: Sun, J., Yang, C., Yang, Y. (eds) China Satellite Navigation Conference (CSNC) 2019 Proceedings. CSNC 2019. Lecture Notes in Electrical Engineering, vol 562. Springer, Singapore. https://doi.org/10.1007/978-981-13-7751-8_37
Download citation
DOI: https://doi.org/10.1007/978-981-13-7751-8_37
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-7750-1
Online ISBN: 978-981-13-7751-8
eBook Packages: EngineeringEngineering (R0)