
Abstract
The inspection procedure of Chinese high voltage power grid is mainly based on human inspection for many years. This is not only time-consuming and difficult, but the inspection results are also not objective and complete. Aiming at these problems, this paper gives a research method based on UAV-borne laser scanning. By taking the orthophotos of the power line corridor area and using the overlapping feature points of the image, the orientation elements of each photo are inversely calculated. According to the principle of aerial triangulation, the pixel matching algorithm is used to calculate the dense point cloud data of the survey area, and the power line point in the point cloud is selected to simulate the complete power line. By calculating the Euclidean distance between the power line and the power line protection area, the calculated result is compared with the power line safety specification to obtain information such as a tree barrier point or an early warning point. It can effectively identify many important defects such as wire-vegetation, wire-building, wire-crossing, etc., and greatly improve the quality and efficiency of the inspection process of existing high-voltage transmission lines.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Unmanned aerial vehicle
- Artificial intelligence
- Laser point cloud
- Three-dimensional reconstruction
- Tree barriers defects
1 Introduction
With the development of China’s economy, there are more high-grade, long-distance transmission lines and more complicated transmission corridors, which brings many difficulties to the management and monitoring of the lines [1]. At present, the domestic collection of forest tree barrier information for overhead transmission line channels mainly includes artificial tree barrier hidden acquisition, UAV visible light barrier hidden danger collection and laser radar tree barrier hidden danger collection [2]. The traditional method of collecting tree hidden dangers is mainly based on manual visual inspection. It not only has a high work intensity, but also is difficult to determine the specific location and has low efficiency [3]. With the rise of drone technology, more and more researchers have used low-altitude visible aerial imagery to detect the safe distance of transmission lines, but the visible light has poor accuracy and instability. Based on laser ranging technology LiDAR realizes echo ranging and accurate orientation, it combines laser ranging, differential positioning, attitude measurement, and uses the reflection characteristics of objects to obtain the position, radial velocity and other information, aiming at realizing the recognition of objects [4, 5]. The application of lidar technology in power industry is deepening and some research achievements have been made [6]. Jinling Wang et al. proposed a navigation method combining global positioning system, inertial navigation system and computer vision. Optical flow analysis of CCD sequence imaging using laser altimeter can obtain navigation information to realize safe distance detection of transmission lines and realize the reconstruction of 3D scenes [7]. Researchers at the GSIRO (Federal Science and Industrial Research Organization) Communications Technology Center in Australia have focused on the development of a small T21 lined drone, and the installation of a laser rangefinder on the drone accurately measures the distance of the wire to the underlying object [8].
Based on the classified point cloud data and power line data, this paper uses the segmented section safety distance calculation method to calculate the distance between the line and the line below the corridor, automatically compares the voltage level with the standard safety distance, and conducts a hazard warning for the area with a distance less than the safety distance. Through the visual calibration technology, the results of the tree barrier analysis are checked to improve the accuracy of the tree barrier analysis, reduce field work and improve work efficiency.
2 Concepts of the Method
2.1 Reconstruction of 3D Power Lines
It is necessary to judge the position of the pole point Before the single power line suspension line is fitted in sections [9]. Curving the points between the two poles After determining the position of the pole point [10]. According to the characteristics of the power line, the power line is a natural catenary curve, and its mathematical model conforms to the hyperbolic cosine function [11]. The curve equation is:
Project the point between the two poles to the plane of the power line and the plane where the z-axis is located, Using the curve fitting and function approximation method in numerical analysis, the optimal parameters a, b, and c in Eq. (1) are solved, and the optimal parameters of each power line are obtained to reconstruct each three-dimensional power line.
2.2 Intelligent Identification of Defect Hidden Danger
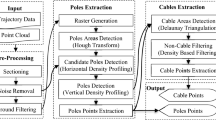
This paper proposes an overhead power line tree barrier hidden danger detection method. The steps are as follows (Fig. 1):

High-speed transmission line defect intelligent identification flow chart
-
(1)
Using the feature points of the overlapping regions of the point cloud data image to inversely calculate the orientation elements of each photo; Through the relative orientation method, the relative position information of the photo can be solved by using more than 5 image points of the same name, and then the image orientation element solution can be completed by absolute orientation (Fig. 2).
Fig. 2. 
Analytical spatial orientation diagram

The method of calculating the three-dimensional coordinates of the two images by using the inner and outer square elements of the two images and the coordinates of the image points corresponding to the ground points is called the space forward intersection, and two photos are taken respectively to form the three-dimensional image pairs. The images of the left and right images of any point A on the ground are A and A′, and the coordinates of A point in the left and right image space auxiliary coordinates are (X, Y, Z) and (X′, Y′, Z′), respectively. The coordinates of the image point in the image space auxiliary coordinates are calculated according to the external coordinate elements of the two images:
x, y are the projection coordinates of the left image point in the left image space coordinate system, x′ y′ are the projection coordinate of the right image point in the right image space coordinate system, f is the principal distance.
-
(2)
According to the principle of aerial triangulation, pixel-by-pixel matching of the same-named pixels on multiple photos is performed, and the excess observations are adjusted to obtain dense point cloud data of the measurement area.
-
(3)
The complete power line is simulated by selecting the point cloud point or manually inserting the point according to the three-dimensional mapping principle T. The electric wire is profiled by extending the electric wire to the cross section, and the shape of the cross section is a two-dimensional parabola. According to the formula of parabola:
a, b, c the three unknowns only need three known points to solve the analytical equation of the oblique parabolic equation, so just need to cross the space to pick up three points on the power line or select three points from the power line point cloud data.
-
(4)
Using each wire simulation equation to perform a sector space search, recording a spatial feature within a set threshold range and modifying a point cloud attribute, and calculating an Euclidean distance of the object within the range of the calculated power line and the power line protection zone.
-
(5)
The set line tree safety distance standard is compared with the distance to obtain a defect point that does not meet the safety distance standard.
Compare the calculated results with the power line safety specifications to obtain information such as tree barrier points or early warning points, and classify the ground objects within a certain spatial range according to the grid code to obtain relevant information such as emergency defects, major defects, general defects and concerns.
3 Test and Analysis
Based on Visual Studio 2010 C++ integration, laser point cloud is used to realize power line 3D reconstruction and defect detection. Test platform configuration: ThinkPad L470, configured as i7-8550U, running platform is Windows 7 system (Table 1).
3.1 Test Data
In this experiment, the vertical and horizontal CW-30LiDAR vertical take-off and landing fixed-wing UAVs were used to obtain the point cloud data of the transmission line. The test flight speed is 25 m/s, the flight altitude is about 200 m, the flight time is about 70 min, and the average point density is about 38.
3.2 Load the Tower
According to the position of the tower, the point cloud data is processed by the file, and the superposition diagram of the pyramid point cloud data and the power line tower number is given (Fig. 3).

Pyramid point cloud data and power line pole tower superposition diagram
3.3 Point Cloud Classification
Point cloud data are divided into ground and vegetation by irregular triangular network progressive encryption algorithm. Then we identify the area of the tower with the coordinates of the tower provided by the asset database. According to the line trend, geometric characteristics, relative elevation, etc. The specific steps are as follows:
-
(1)
Firstly, spatial expansion segmentation is carried out for point cloud, and all points are classified according to their spatial equality.
-
(2)
Extract the point cloud of different slices, conduct principal component analysis, calculate the characteristic value, and then solve the dimension feature of the slices. After preprocessing each data, feature recognition and automatic interpretation classification will be carried out.
-
(3)
Build a multi-scale classifier to automatically find the optimal scale combination for segmentation, and finally achieve automatic segmentation of cloud data of different categories. The whole process of classifier is a supervised classification process, which can realize data classification intuitively. The design of the classifier adopts the support vector machine classifier to carry out iterative analysis on the subspace projection, and finally divide the point cloud into four categories: ground, vegetation, pole tower and power line. For the point cloud with misclassification, the point cloud category needs to be modified through manual interpretation, such as jump line, low-level power line, building and other point cloud (Fig. 4).
Fig. 4. 
Cloud classification results

3.4 Lead to Extract
After preprocessing each data, feature recognition and manual interpretation are conducted (Fig. 5).

Automatic wire extraction and reconstruction
Manually select the point cloud lowest point to fit the traverse results (Fig. 6):

Wire extraction and reconstruction by hand
The results show that the horizontal distance between the automatically fitted power line and the manually determined power line is about 0.247 m, the vertical distance is about 0.144 m, the headroom distance is about 0.271 m, the error is small, and the accuracy of the automatically fitted power line is high. In particular, the vertical distance error is the smallest, which satisfies the requirements of tree barrier detection (Fig. 7 and Table 2).

Comparison of precision between automatic fitting traverse and manual fitting traverse
3.5 Defect Analysis
Establish a tree-shaped data structure for each point cloud, traverse the laser point of each power line, and find out whether there are other types of objects such as vegetation, crossover, buildings, etc. within the scope according to the safety distance specified by the line safety operation regulations. If it exists, it is confirmed as the defect point location and saved to the defect point database (Figs. 8 and 9).

Defect distance rendering

Analysis report of tree defect
3.6 Experimental Results
The results of the above test data show that the intelligent identification method for high-voltage transmission line defects based on UAV 3D laser radar can quickly and effectively detect wire-vegetation, wire-building, wire-ground, wire-crossing defects, each. The location, type and range of defects can be accurately obtained. Compared with the traditional inspection methods, the speed is fast, the position is accurate, and the efficiency is high (Table 3).
4 Conclusion
In this paper, a set of research methods for intelligent identification of transmission line defects by UAV 3D laser radar is proposed. By taking the orthophotos of the power line corridor area and using the overlapping feature points of the image, the orientation elements of each photo are inversely calculated. According to the principle of aerial triangulation, the pixel matching algorithm is used to calculate the dense point cloud data in the survey area, and the power line point in the point cloud is selected to simulate the complete power line. The vertical distance between the automatic wire classification and the manual wire classification is 0.343 m. By calculating the Euclidean distance between the power line and the power line protection area, the calculated result is compared with the power line safety specification to obtain information such as the tree barrier point or the warning point, which greatly improves the wire fitting and the position information of the tree barrier.
References
Kim, H.B., Sohn, G.: Point-based classification of power line corridor scene using random forests. Photogram. Eng. Remote Sens. 79(9), 821–833 (2013)
Lin, X., Zhang, J.: 3D power line reconstruction from airhornc LiDAR point cloud of overhead electric power transmission corridors. Acta Geodetica et Cartographzca Szrizca 45, 347–353 (2016)
Shao, T.: Mechanical Calculation of Overhead Electric Power Transmission Lines (Second Re-lease). China Electric Power Press, Beijing (2003)
Automatic recognition of defects on transmission lines from UAV-borne laser scanning data. Remote Sens. Inf. 32, 52–57 (2017)
Automatic extraction and reconstruction of bundle conductors from airborne LiDAR point clouds. Sci. Surv. Mapp. 43, 124–130 (2018)
Lhen, C., Mai, X., Song, S., et al.: Automatic power lines extraction method from airhornc LiDAR point cloud. Geomatics Inf. Sci. Wuhan Univ. 10(12), 1600–1605 (2015)
Lai, X., Dai, D., Zheng, M., et al.: A method for powerline 3D reconstruction based on LiDAR point cloud data. J. Remote Sens. 18(6), 1223–1229 (2014)
Ye, L., Liu, Q., Hu, Q.: Research of power line fitting and extraction techniques based on LiDAR point cloud data. Geomatics Spat. Inf. Technol. 33(5), 30–10 (2010)
Yu, J., Mu, C., Feng, Y., et al.: Powerlines extraction techniques from airborne LiDAR data. Geomatics Inf. Sci. Wuhum Univ. 36(11), 1275–1279 (2011)
Lai, X., Dai, D., Zheng, M., et al.: Power-line three-dimensional reconstruction for LiDAR point cloud data. J. Remote Sens. 18(6), 223–229 (2014)
Press, W.H., Flanncry, B.P., Teukolsky, S.A., et al.: Numerical Recipes: The Art of Scientific Computing. Cambridge University Press, Cambridge (2007)
Acknowledgements
Implementation of innovation driven development capacity building special funds of Guangdong.
Academy of Sciences (2017GDASCX-0101, 2017GDASCX-0601).
Guangdong Innovative and Entrepreneurial Research Team Program (2016ZT06D336).
Guangzhou Science and Technology Program (201604016047, 201806010106).
Guangdong Science and Technology Program (2017B010117008).
Guangzhou Hydraulic Technological Innovation Project (MZSK-2016-01, SW-2018-01).
The National Natural Science Foundation of China (41401430).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Yang, C., Li, Y., Zhou, X., Yang, J., Zhang, C., Liu, H. (2019). Research on 3D Reconstruction of Transmission Linesnd Identification of Hidden Dangers of Tree Barriers Based on Airborne Lidar Point Cloud. In: Xie, Y., Zhang, A., Liu, H., Feng, L. (eds) Geo-informatics in Sustainable Ecosystem and Society. GSES 2018. Communications in Computer and Information Science, vol 980. Springer, Singapore. https://doi.org/10.1007/978-981-13-7025-0_38
Download citation
DOI: https://doi.org/10.1007/978-981-13-7025-0_38
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-7024-3
Online ISBN: 978-981-13-7025-0
eBook Packages: Computer ScienceComputer Science (R0)