
Abstract
Energy production from solar panels is one of the fastest growing ways of receiving environmental-friendly power. Energy saving is the biggest issue in these days. Therefore, this paper presents a comparison of three different solar panels made by companies from India, Canada and Poland to bring the power of the sun to people in the most efficient and cost-effective way. For this comparison, the number of cells and datasheets are given by the manufacturer. This paper presents PV-cell-based circuit model equations, which define the model for estimating the PV characteristic curves of photovoltaic panel with respect to changes on climate parameters such as irradiance and temperature. In this paper, the MPPT (maximum power point tracking) with DC–DC buck/boost converter is used to obtain time-dependent graphs with the help of MATLAB simulation. The incremental conductance (INC) and perturb and observe (P & O) methods are used to obtaining the maximum efficiency of MPPT. The comparison results of these both methods are also given in this paper.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Solar energy in its direct form is used to produce electricity by photovoltaic energy and for the production of heat. Silicon-based semiconductor photoelectric cells are characterized by high reliability and long service life [1]. Photovoltaic (PV) systems directly change the energy of sunrays into electrical energy [2]. The photovoltaic efficacy was discovered in 1954 [1]. After a long time, with many researches today, solar cells are used to power calculators, watches and space satellites, etc. Solar panel has a lot of advantages. From solar panel, electricity is produced directly without any additional conversion, i.e., less loss [3]. There is energy efficiency in the same regardless of the scale of production. Power is generated even during cloudy weather with diffused light [4]. No harmful gases are produced during electricity generation [5]. Solar panel required minimal effort for operation and maintenance.
The disadvantage of photovoltaic cells is their cost and very low efficiency. Solar energy is not 100% reliable. The easiest way to explain it is sun movement, i.e., when the sun is not lucent or cloudy time, energy generation is zero through PV cells. Therefore, power production is generally influenced at the hours of darkness and during wintry weather. This problem is short out with the help of battery backup system, which accumulates the power to be used when the sun is going down and not shining.
For the first time, the photovoltaic effect has been examined by A. C. Becquerel in 1839. W. Adams and R. Day, 37 years later, observed this phenomenon at the boundary of two solid bodies [6]. This crystal which releases paper was taken the center of attention on the photovoltaic modules modeling with composition of different cells. The MPPT charge controller ensures that the loads receive maximum current to be used [7]. The maximum power point is obtained when the solar panel operates, characteristic of a solar panel curvature is knee formed and the position at which the maximum power is obtained, i.e., at MPP, the current and voltage values are given own best output values [8]. The main paper objective is to compare the solar systems of the different manufacturer panels with the help of MPPT algorithms which are based on two different methods such as incremental conductance (INC) and perturb and observe (P & O).
2 Ideal PV Cell Model
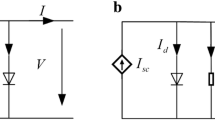
A photovoltaic cell is a semiconductor-based appliance that transforms sunlight and reflections of illumination precisely into electricity by the photovoltaic effect. The material from which most of the panels are made is silicon electrons [1]. In the ideal photovoltaic cell, it is assumed that Rsh = Rs = 0 where Rs is the series resistance which affects more accurate shape between open circuit voltage and MPP—maximum power point. Rsh is shunt resistance; this one corresponds to leakage current to the ground. Figure 1 shows the circuit diagram of PV cell. Appropriate equations to describe and define the model of PV cell are presented below:

The circuit of platonic photovoltaic cell using a single diode
where the series resistance is represented by Rs, the photo-current value is denoted by Iph, the reverse saturation current of diode is represented by Is, the output voltage is denoted by Voc, the parallel resistance is denoted by Rp symbol, k is Boltzmann’s constant (=1.38064852 × 10–23 J/K) and the charges on electron is symbolized by q. Using Eqs. (1)–(8), the solar panel module is formed. Figure 2 shows the basic I–V characteristic of the photovoltaic solar cell. In this figure, the total current (I) in the cell is the combination of the generated current (Ipv) by light and the current (Id) in the diode.

I–V characteristic curve of the photovoltaic cell
The atmospheric conditions are very important for the operation of photovoltaic cells, which determine the changes in sunlight and the working temperature of the cell. Thus, they influence the shape of the current–voltage curve. Key influences on the work of photovoltaic cells are atmospheric changing, which determine sunshine changes and temperature of work.
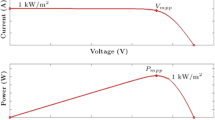
Figure 3 shows the I–V characteristics based on Canadian 72 cells solar panel datasheet CS6K-280M. This figure also shows the MPPT location. In the first graph (in Fig. 3), maximum power point should be at the point where the graph falls, i.e., the voltage is around 75 V, and current is 27.5 A at maximum power point. Therefore, from Fig. 4, two more remarkable points are observed: short circuit (0 V, 27.5 A) and open circuit (75 V, 0 A).

Characteristic I–V curve of the CS6K-280M PV cell

Flowchart for perturb and observe algorithm
3 Maximum Power Point Tracking
MPPT is an higher power point tracking system, which one can increase the amount of energy obtained by up to 20% (in relation to the inverter without MPPT) [9]. This point changes primarily in shading of modules. All modern inverters have at least one arrangement like that. Photovoltaic modules do not have a single maximum power point (MPP). It changes according to the intensity of radiation and temperature, because the shape of the power characteristic changes as the function of voltage changes. The purpose of the MPPT is to “track” this point and to adapt as fast as possible to the new value. In fact, the efficiency and speed of the MPPT system guarantee the highest values of processed energy of solar panel.
3.1 Efficient MPPT Commands Algorithms
There are three basic and most used types of maximum power point tracking: hill climbing, perturb and observe and incremental conductance. The problem of local maximum comes in the hill-climbing method [9, 10]. Therefore, in this paper, perturb and observe and incremental conductance methods are used for comparison.
3.2 Perturb and Observe Command Principle
One of the most frequently used algorithms for finding the maximum working point (MPP) is used to find the optional voltage: the perturb and observe (PO) algorithm. This method is nowadays widely used because of its ease of implementation. This algorithm consists in small periodic increases or decreases in voltage and then compares the power delivered at a given moment and the power delivered before the voltage change. On the basis of the power comparison, another value of the voltage increases and its sign is determined. The process of perturb and observe algorithm is explained clearly in Fig. 4.
3.3 Incremental Conductance
This method is based on the principle of impedance matching. Here, power controlling is used to match the internal resistance of the PV module to the input resistance of the converter. The incremental conductance method utilizes the two sensors for the current and voltage measurement to impression the voltage and current outcomes of the photovoltaic array.
From Fig. 5, we can say that incremental conductance method gives greater accuracy than the P & O method under very drastically changing conditions and provides a local maximum MPP. But the weakness of this technique is the greater number of calculations compared to the P & O method. Figure 6 presents a flowchart of incremental conductance algorithm method for solar panel model tracking MPP.

Characteristic P–V curve of the CS6K-280M PV cell CANADA

Flowchart for incremental conductance algorithm
4 Simulation Results of Solar System
The model that is devoted to this paper is the design of solar panels enriched with the maximum power point tracking system and DC-to-DC-type converter, which is also called Buck–Boost. This solar system has three components: active switch, passive switch and inductor. The main task of the converter is buck—means decrease the voltage, and boost—means increase the voltage, relative to the input voltage. In Fig. 7, based on PV system, two different methods (perturb and observe and incremental conductance) are used for making the maximum power point tracking (MPPT) block.

Simulink model of PV system with MPPT
For simulation results, two types of solar panel (CS6K-280M & PVMU60-210) are used in the PV system model. Figure 8 shows the voltage, power and current graphs with solar panel CS6K-280M model. Figure 9 shows the voltage, power and current graphs with solar panel PVMU60-210 model. Results of Figs. 8 and 9 are obtained with the help of incremental conductance topology. Figures 10 and 11 are obtained with the help of perturb and observe method with solar panel models CS6K-280M & PVMU60-210, respectively. These results are given in Tables 1 and 2.

Voltage, power and current versus time graphs with solar panel CS6K-280M model using incremental conductance method

Voltage, power and current versus time graphs with solar panel PVMU60-210 model using incremental conductance method

Voltage, power and current versus time graphs with solar panel CS6K-280M model using perturb and observe method

Voltage, power and current versus time graphs with solar panel PVMU60-210 model using perturb and observe method
5 Conclusion
This paper covered the incremental conductance and perturb & observe-based MPPT algorithms. The modeling and simulations of these methods have been introduced and done in MATLAB/Simulink. From the simulation results, we can state that the tracking speed of INC method is faster compared to P & O method. It is also found that in perturb and observe algorithm, the number of component used is less as compared to INC algorithm. In this paper, MPPT technique is used to achieve high efficiency. Complexity of P & O method implementation is low. The INC method is more complex. Therefore, the major disadvantage of the INC method is a long calculation time because of much more complicated structure. From simulation outcomes, another important aspect is the power achieved by the P & O method which is much larger than that obtained with INC method. Finally, by comparing both methods, we can say that the perturb and observe method-based MPPT tracking is definitely better.
References
Gupta S, Sharma A (2018) Global scenario of solar photovoltaic (SPV) materials. In: Advanced computational and communication paradigms. Springer, Singapore, pp 126–133
Villalva MG, Gazoli JR, Ruppert Filho E (2009) Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans Power Electron 24(5):1198–1208
Saini P, Patil DV, Powar S (2018) Review on integration of solar air heaters with thermal energy storage. In: Applications of Solar Energy. Springer, Singapore, pp 163–186
Jacobs WA, Hertz AD, Tam MK (2018) Solar energy collecting apparatus and method. U.S. Patent No. 9,865,760. 9 Jan
Kabir E et al (2018) Solar energy: potential and future prospects. Renew Sustain Energy Rev 82:894–900
Johansson TB, Burnham L (1993) Renewable energy: sources for fuels and electricity. Island press
Tian H, Boschloo G, Hagfeldt A (2018) Molecular devices for solar energy conversion and storage. Springer, Singapore
Shahid H et al (2018) Implementation of the novel temperature controller and incremental conductance MPPT algorithm for indoor photovoltaic system. Solar Energy 163:235–242
Hohm DP, Ropp ME (2000) Comparative study of maximum power point tracking algorithms using an experimental, programmable, maximum power point tracking test bed. In: Photovoltaic specialists conference, conference record of the twenty-eighth IEEE
Hua C-C, Fang Y-H, Wong C-J (2018) Improved solar system with maximum power point tracking. IET Renew Power Gener 12(7):806–814
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Gupta, S., Singh, N., Singh, S.B. (2019). Photovoltaic Module Designing with Comparison of Different MPPT Techniques. In: Mishra, S., Sood, Y., Tomar, A. (eds) Applications of Computing, Automation and Wireless Systems in Electrical Engineering. Lecture Notes in Electrical Engineering, vol 553. Springer, Singapore. https://doi.org/10.1007/978-981-13-6772-4_12
Download citation
DOI: https://doi.org/10.1007/978-981-13-6772-4_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-6771-7
Online ISBN: 978-981-13-6772-4
eBook Packages: EngineeringEngineering (R0)