
Abstract
This manuscript is a review work of various maximum power point tracking (MPPT) techniques which experience partial shading conditions (PSCs), an unavoidable complication that significantly reduces the efficiency of the overall system. The exhaustive comparison of various MPPT’s taken by the researchers which tracks the global peak (GP) of a photovoltaic (PV) array under PSC is compared and the best available option is proposed for researchers. MPPT techniques such as perturb and observe (P&O), improved particle swarm optimization (IPSO), and grey wolf optimization (GWO) are the recent techniques proposed by the researchers. Various DC–DC converter topologies with PV system are also compared for the purpose of maximum power point tracking.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The sunlight is directly converted into electricity by photovoltaic system. The energy that obtained depends on various factors such as solar radiation, temperature, and the voltage produced [1]. There is a mismatch between the module currents of Photovoltaic (PV) array because PV array modules receive non-uniform solar irradiation in case of partial shading conditions (PSCs). The main reason of the degradation of power generation of a PV array is partial shading [2]. Various conventional maximum power point tracking (MPPT) methods are reported in the past. These MPPT methods show best results only under constant radiances. In this review paper, the focus of the authors is to highlight the comparison in conventional and recent artificial intelligence (AI)-based MPPTs in order to improve the issues of fluctuations and efficiency generated in the output of PV system by tracking global peak (GP) during partial shading conditions (PSCs) [2]. MPPT techniques are required for extracting the maximum available power from PV systems. MPPT algorithms are applied to generate duty cycle in power electronic converters connected to PV systems to track the voltage and current for maximum power generation [3]. The analysis of various DC–DC converter topologies is also emphasized in this paper.
2 PV System Characteristics During PSC
2.1 Characteristic Feature of PV Cell
Equivalent single diode model can be used to represent a PV cell. Following symbolic notations have been used in the PV model.
- \( I_{\text{pv}} \) :
-
Current source of PV module;
- D:
-
Diode allied in parallel to current source;
- \( R_{s} \) :
-
Sum of resistances due to all the components that comes in path of current;
- \( R_{p} \) :
-
Represent the leakage across the P–N junction which is required to be as high as possible;
- \( I \) :
-
Difference between the photocurrent \( I_{\text{pv}} \) and the diode current, which is specified by:
where \( I_{0} \) is shown as saturation current, \( K_{s} \) is the Boltzmann constant, \( q \) is given as electron charge, \( T_{a} \) is temperature in kelvin, and \( N_{s} \) is the cells connected in series [2].
2.2 PV and PSC Elementary Description
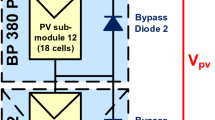
Sunlight is the most desirable source of renewable clean and abundant energy. PV cells are used to convert sunlight into electricity. Numerous PV modules are connected in series or parallel in a PV cell as shown in Fig. 1a, b. PV cells give different output during PSC. Bypass diodes are present in PV due to which characteristic curve of PV yields a multiple peak curve during PSC condition as shown in Fig. 1c. In this review paper, the results of two PV configurations are presented by the researchers comprising of four modules allied in series (4S configuration) having shading patterns of two different types [2]. As mentioned the P–V curves of two shading patterns are as shown in Fig. 1.

3 MPPT Algorithms
3.1 Perturb and Observe (P&O) Algorithm
P&O system is an example of hill climbing method. Firstly, a slight perturbation is acquainted with the P&O algorithm. The introduction of this perturbation leads to the change in the power of the module. As soon as the maximum power is obtained, the power at the next interval of time decreases and henceforth the perturbation moves in opposite direction. When the maximum point is reached, the algorithm will oscillate around that point. The researches [1] have shown that perturbation size should be kept small so as to keep the variation of power small as shown in Fig. 2.

Perturb and observe algorithm
3.2 Improved Particle Swarm Optimization (IPSO) Algorithm
In IPSO algorithm, the optimal and sub-optimal locations, which each particle encountered and the swarm meted, are kept. Based on these locations, the IPSO produces four velocities for each particle and obtains the particle’s iterative position. The IPSO enlarges the search space and enhances global search ability. This review work also demonstrates IPSO algorithm which has been anticipated in order to overcome the limitation of particle swarm optimization (PSO). The main disadvantage of PSO algorithm is that it converges in local optima. Thus, the algorithm known as IPSO was proposed with more proficient global searching ability. In order to overcome this local optima problem, the improved algorithm has adopted a new mechanism. Initially, the exact location of the finest solution is not known by the particle when it is searching in the solution space. But IPSO helps to know the best locations and also it helps to record the worst locations of the individual particle. Hence, this can help in making individual particles aware of the worst locations which can help in widening the global searching space of particles. The particle velocity and position renewal formula are given in (2) and (3):
where \( V_{id} \) is the particle velocity, \( \omega \) is called inertia weight, \( \eta_{1} \) and \( \eta_{2} \) are the constants and are known as accelerating factors, \( {\text{rand}}() \) are random numbers, \( P_{idw} \) and \( P_{gdw} \) are given as the best position particle \( id \) has found and the best particles position in the entire swarm [4].
3.3 Grey Wolf Optimization (GWO) Algorithm
The GWO algorithm imitated the hunting mechanism and leadership pyramid of grey wolves. Grey wolves prefer to live in a group. Four types of grey wolves are employed for simulating the leadership pyramid. The types of grey wolves are alpha (α), beta (β), delta (δ), and omega (ω). While designing GWO, alpha (α) is considered as the fittest of all solution so as to mathematically model the social pyramid. Consequently, the next two best solutions are named as beta (β) and delta (δ), respectively, and remaining solutions are considered as omega (ω). Three stages of GWO algorithm are shown in Fig. 3, viz. hunting and tracing for prey, surrounding prey, and attacking prey are the steps to perform GWO algorithm. The encircling behaviour of Grey wolves is shown in (4) and (5).

Grey wolves’ behaviour of hunting. a Tracing prey, b–d surrounding prey, e attacking prey
where \( t \) is current iteration, \( D \), \( A \), and \( C \) denote vector coefficient, \( X_{p} \) is given as prey position vector, and \( X \) shows the grey wolf position vector. Equations (6) and (7) show the vectors \( A \) and \( C \):
During iterations the components linearly decrease from 2 to 0 and are given as random vectors in [0, 1]. Alphas are known as the leaders which usually guide the hunting. But sometimes beta and delta wolves may also participate in hunting. Care of the wounded wolves is guided by Delta and omega. Therefore, as a candidate solution alpha is preferred [2].
4 Comparison of P&O, IPSO, and GWO Algorithm
The review of above all algorithms shown was implemented under PSC and also on the varying insolation level for 4S configuration. In order to design single diodes model of a PV module the following parameters are taken:
\( P_{ \hbox{max} } = 200\;{\text{W}} \), \( V_{\text{OC}} = 32.8\,\text{V} \), \( I_{\text{SC}} = 8.21\,{\text{A}} \), \( V_{mp} = 26.3\,{\text{V}} \), and \( I_{mp} = 7.61\,{\text{A}} \). The parameters of IPSO are \( w_{ \hbox{max} } = 1 \), \( w_{ \hbox{min} } = 0.1 \), \( c_{{1,{ \hbox{max} }}} = 2 \), \( c_{{1,{ \hbox{min} }}} = 1 \), \( c_{{2,{ \hbox{max} }}} = 2 \), \( c_{{1,{ \hbox{min} }}} = 1 \). Figure 4, [2] shows the comparison of various 4S configuration graphs of power, voltage, and current of GWO-, IPSO-, and P&O-based MPPT (Table 1) .

Graphs for 4S configuration. a GWO MPPT, b IPSO MPPT, c P&O MPPT
5 Various DC–DC Converters
The review work also highlights various converters as below.
5.1 CUK Converter
CUK converter is a DC–DC converter in which the output voltage can be greater or lesser than the given input voltage, but the output voltage has a reverse polarity of the input voltage. CUK switching topology is shown in Fig. 5. Inductor component L1 functions as a filter in order to prevent larger harmonics. Capacitor C1 helps in transferring energy to inductor of the CUK converter. The voltage across inductor is zero at steady state operation \( C_{1} = V_{s} - V_{0} \). When the switch is closed the condition for diode is forward biased and current on \( C_{1} \) is given by \( \left( {{IC}_{{1\left( {\text{close}} \right)}} = - IL_{1} } \right) \). Also the current in L1 and L2 flows through the diode when the switch is open. Current on C1 is given as \( \left( {IC_{{1\left( {\text{open}} \right)}} = - IL_{1} } \right) \). Power absorbed in load R is equal to the power delivered from the source \( - V_{0} IL_{2} = V_{s} IL_{1} \) [5,6,7].

CUK converter switching topology
5.2 Single-Ended Primary-Inductor Converter (SEPIC Converter)
The SEPIC is a type of DC/DC converter allowing voltage at its output to be greater than, less than, or equal to that at its input. There is quite similarity between SEPIC and CUK converter. The only dissimilarity is that the polarity of the output signal is not inverted. Switching topology of the SEPIC converter is as shown in Fig. 6. During operating conditions in a stable state, the magnitude of the voltage across the inductor is zero, so the magnitude of the voltage on the capacitor \( C_{1} \) is VC1 = V S . When the condition for switch is closed then the diode is opened, the inductor L1 is loaded from source \( V_{S} \), and inductor L2 fill C1. During these conditions, no energy is delivered to the load. When the condition of the switch is open, diodes condition is closed, L1 fill C1 and L2 transfer current to the load then the magnitude of the voltage passes \( 1, V_{{1{\text{close}}}} = V_{s} \). The magnitude of the voltage on L1 is \( V,L_{{1{\text{open}}}} = V_{0} \) [5,6,7].

SEPIC converter switching topology
5.3 ZETA Converter
A Zeta converter is a fourth-order DC–DC converter made up of two inductors and two capacitors and capable of operating in either step-up or step-down mode. In ZETA DC–DC converter, there are two modes of operations. During first mode switch is made turn on and in the other mode switch is made to turn off. Zeta converter is shown in Fig. 7. It comprises of insulated-gate bipolar transistor (IGBT) as a switch, diode, two capacitor C1 and C2, and two inductor L1 and L2 with a load RL. In the first operation mode, inductor L1 and L2 start charging. In the second operation mode, inductors (L1, L2) are in a condition to release the stored energy (discharging). The release of energy from L1 charges the capacitor C1 and the inductor L2 transfer energy to the output circuit which is connected to the load [5,6,7].

Zeta converter switching topology
6 DC–DC Converters: Comparison
Comparison of several DC–DC converters illustrates the input power signal of PV and output of the DC–DC converters circuit.
Comparison of results in Figs. 8, 9 and 10 show that maximum power point tracking signal occurred best in ZETA converter where level of ripple is low in current and voltage.

CUK converter

SEPIC converter

ZETA converter
7 Conclusion
This paper shows the review work of previously used control techniques. Firstly, P&O, IPSO, and GWO algorithm are compared in which GWO algorithm shows better result as IPSO and GWO overcome the problem of local minima. Various DC–DC converters are also compared that are CUK, SEPIC, ZETA converters. The comparison of these converters shows that ZETA converter shows more effectiveness than other two converters.
Abbreviations
- (1):
-
Maximum power point tracking (MPPT)
- (2):
-
Partial shading conditions (PSC)
- (3):
-
Global peak (GP)
- (4):
-
Photovoltaic (PV)
- (5):
-
Perturb and observe (P&O)
- (6):
-
Improved particle swarm optimization (IPSO)
- (7):
-
Grey wolf optimization (GWO)
- (8):
-
Artificial intelligence (AI)
- (9):
-
Particle swarm optimization (PSO)
- (10):
-
Insulated-gate biploar transistor (IGBT)
- (11):
-
Single-ended primary-inductor converter (SEPIC Converter)
References
Alsadi, S., Alsayid, B.: Maximum power point tracking simulation for photovoltaic systems using perturb and observe algorithm. Int. J. Eng. Innov. Technol. (IJEIT) 2(6) (2012). ISSN: 2277-3754
Mohanty, S., Subudhi, B., Ray, P.K.: A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 7(1), 1949–3029 (2016)
Mahmoud, Y., Abdelwahed, M., El-Saadany, E.F.: An enhanced MPPT method combining model-based and heuristic techniques. IEEE Trans. Sustain. Energy 7(2), 1949–3029 (2016)
Yan, X., Wu, Q., Liu, H., Huang, W.: An improved particle swarm optimization algorithm and its application. IJCSI Int. J. Comput. Sci. Issues 10(1), No 1 (2013). ISSN (Print): 1694-0784|ISSN (Online): 1694-0814
Soedibyo, M.A., Amri, B.: The comparative study of Buck-boost, Cuk, Sepic and Zeta converters for maximum power point tracking photovoltaic using P&O method. In: Proceedings of 2015 2nd International Conference on Information Technology, Computer and Electrical Engineering (ICITACEE), Indonesia, 978-1-4799-9863-0/15
Rajeswari, R.V., Geetha, A.: Comparison of Buck-boost and CUK converter control using fuzzy logic controller. Int. J. Innov. Res. Sci. Eng. Technol. 3(3) (2014)
Bist, V., Singh, B.: A brushless DC motor drive with power factor correction using isolated zeta converter. IEEE Trans. Industr. Inf. 10(4), 1551–3203 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Srishti, Gaur, P., Chandra, S. (2018). Current Trends in Control Techniques in Renewable Energy: A Review. In: Singh, S., Wen, F., Jain, M. (eds) Advances in Energy and Power Systems. Lecture Notes in Electrical Engineering, vol 508. Springer, Singapore. https://doi.org/10.1007/978-981-13-0662-4_4
Download citation
DOI: https://doi.org/10.1007/978-981-13-0662-4_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-0661-7
Online ISBN: 978-981-13-0662-4
eBook Packages: EnergyEnergy (R0)