
Abstract
The present paper deals with the Robust Design Optimization (RDO) of an offshore steel structure under wave loading considering parameter uncertainty. A novel Moving Least Squares Method (MLSM)-based metamodelling strategy has been adopted in the framework of MCS to evade extensive computational time requirement. The optimization problem is posed as weight minimization problem under displacement constraint. The proposed MLSM-based RDO strategy yields more accurate solutions than the conventional Least Squares Method (LSM)-based metamodelling when compared with the direct MCS results as benchmark. The proposed approach requires less computational time than the direct MCS. The results show that by compromising a small increment in structural weight, one can achieve robust and reliable design solution within affordable computational time by the proposed RDO approach.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Robust design optimization
- Offshore structure
- Parameter uncertainty
- Wave load
- Moving least squares method
1 Introduction
The studies on deterministic design concepts, methods and cost-effectiveness of offshore structure in last decade are exhaustive [1]. Among different elements of marine structure, the support structure has the highest cost share [2]. Currently, the most widely used support structure is steel tubular tower that is connected through a transition piece to a mono pile which is a suitable concept for water depths of up to 40 m [3]. It has been now well established that disregarding uncertainty in the Deterministic Design Optimization (DDO) process will invite catastrophic consequences [4]. Hence, there is a growing trend to incorporate uncertainty directly in the optimization process. In recent years, efforts have been observed to explore probabilistic optimization and design under wave load. Critical parameters for designing such an elevated structure are the wave height crest and its probability distribution. The most conventional approach of optimization under uncertainty is the Reliability-Based Design Optimization (RBDO), where specific target reliability is sought for the critical limit states [5]. However, the RBDO yields design which may be sensitive to input parameter variation due to uncertainty. A Robust Design Optimization (RDO) becomes an attractive alternative to the RBDO approach in such cases to make a design least sensitive to input parameter uncertainty. Moreover, for life cycle cost analysis, the deviation of the structural performance should be designed to a minimum to avoid maintenance and repair cost. It has been observed that the RDO study on offshore structure is scarce. Application of RDO in designing offshore structure is felt to be more prudent under such extreme loadings, largely uncertain in nature. The present study focuses on the RDO of a steel offshore structure under wave loading considering parameter uncertainty.
In [6], RDO of offshore turbine supporting structure is presented considering normally distributed dimension and material properties. However, uncertainty in load and robustness of constraints are not considered in their study. The direct Monte Carlo Simulation (MCS) have been applied to offshore structure optimization that makes the implementation procedure extensively time-consuming [6,7,8]. It is of worth mentioning that solution of RDO of such structure would involve complex computer codes and numerical analyses by the direct MCS approach. Also, several repetitive analyses of finite element model would be involved to yield a single solution of RDO. Moreover, the gradients of the constraint functions are required to be evaluated many times during the execution of the RDO process. Therefore, in the present study, metamodelling technique based on Response Surface Method (RSM) has been adopted to evade complex interlinked repetitive evaluation of structural response and their gradients. Once the RSM approximation is obtained and validated by ‘goodness of fit’ tests, the gradient evaluation becomes extremely simplified to cast the RDO problem. Conventionally, Least Squares Method (LSM)-based RSM is applied for dealing optimization problems including implicit constraint functions. However, the accuracy with the LSM-based RSM is often challenged. On the other hand, the Moving Least Squares Method (MLSM) is found to be more efficient in this regard [9]. Thus, in the present study, a novel MLSM-based adaptive metamodelling strategy has been adopted in place of the direct MCS to avoid extensive computational time requirement. The proposed RDO approach is elucidated by a numerical study on a steel jack-up platform.
2 Development of the Proposed RDO Approach
The performance of an optimal design depends on the Design Variables (DVs) and the Design Parameters (DPs). The DVs are the variables that the designer wants to optimally evaluate. The DPs are the other involved system parameters used for design which cannot be controlled by the designer. The objective of a typical design optimization is to determine the DVs to meet the desired design performance. Design objectives are normally specified by a performance function associated with a set of constraints. The Deterministic Design Optimization (DDO) can be mathematically expressed as
In above, f(u) is the performance function; \( g_{j} (u) \) denotes the jth constraint; \( u = x \cup z \) is a n-dimensional vector composed of both the DVs and DPs denoted by
respectively; \( x_{i}^{\text{L}} \, {\text{and}} \, x_{i}^{\text{U}} \) are the lower and the upper bounds of the ith DV, respectively. J, K and L are the total number of constraints, DVs and DPs, respectively. It can be noted here that the DDO problem as described by Eq. (1) does not consider the effect of randomness in x and z. But the performance function and the constraints are the function of x and z. Thus, the randomness in x and/or z are expected to propagate at the system level, influencing the performance function and the constraints of the related optimization problem. The development of the RDO methodology is described next in the Sect. 2.1. Then, in Sect. 2.2, the MLSM strategy is briefly discussed.
2.1 The RDO Methodology
The presence of uncertainty in structural parameters causes significant deviation of performance of a structural system from its desired behaviour. Such undesirable deviation of system performance indicates a poor quality and added life cycle cost of the structure, including inspection, repair and other maintenance costs in the perspective of the entire design life of the structure. To decrease such deviation, one possible way is to reduce or even to eliminate the source of uncertainty in the structural parameters by prudent design and construction practice [10], which may either be practically impossible or adds much to the total cost of the structure. Another way is to find a design, in which the structural performance is less sensitive to the variations of the parameters without eliminating the cause of parameter variations. This latter one is the task of the RDO. The RDO is fundamentally concerned with minimizing the effect of uncertain DVs and DPs to the output response. The concept of RDO is presented in Fig. 1. Two designs, conventional optimal design under uncertainty (xopt) and RDO (xrob), are shown in the same figure. Both design inputs (x) are deviated with same amount due to uncertainty. However, probability density function of the output response is considerably less deviated by the RDO (Δfrob) than the other case (fopt). Also, it can be readily observed from Fig. 1 that the RDO captures comparatively a flatter insensitive region of the performance function. The RDO is formulated by simultaneously optimizing the expected value and the variation of the performance function. The robustness in constraint is ensured by adding suitable penalty term and ensuring a target reliability index.

A robust solution versus an optimal solution [11]
The RDO problem is formulated in the following [12] and [13]:
where k is a designer specified penalty factor to enhance the feasibility of the jth constraint and can be obtained as \( \Phi ^{ - 1} \left\{ {1 -\Phi \left( { - {\beta}^{\text{T}} } \right)} \right\} \) and \( {\beta }^{\text{T}} \) is the target reliability index and \( \Phi \) is the cumulative density function of a standard normal distribution. \( {\phi }(u) \) is a new objective function, called desirability function, and the parameter \( {\alpha } \) serves as a weighting factor; \( {\mu }_{\text{f}} \) and \( {\sigma }_{\text{f}} \) are the mean and the standard deviation of the performance function, respectively; \( {\mu }_{\text{f}}^{*} \) and \( {\sigma }_{\text{f}}^{*} \) are the optimal values of the mean and the standard deviation obtained for \( {\alpha } \) equals to 0.0 and 1.0, respectively; \( {\mu}_{{{g_{j} }}} \) and \( {\sigma }_{{{g}_{j} }} \) are the mean and the standard deviation of the jth constraint gj, respectively.
2.2 The MLSM-Based RSM Strategy
The MLSM-based RSM is a weighted LSM that has varying weight functions with respect to the position of approximation [14]. The weight associated with a particular sampling point xi decays as the prediction point x moves away from xi. The weight function is defined around the prediction point x and its magnitude changes with x. The modified error norm Ly(x) can be defined as the sum of the weighted errors [14]
where \( {\varepsilon } \) is the lack of fit error term; Y represents the response of the structure; and Q is the design matrix and \( {\beta } \) is the unknown coefficient vector. The coefficient β(x) can be obtained by the matrix operation as below [14]:
In the above equation, W(x) is the diagonal matrix of the weight function and it depends on the location of the associated approximation point of interest (x); W(x) may be obtained by utilizing the weighting function as an exponential function [14]:
where \( R_{\text{I}} \) is the approximate radius of sphere of influence, chosen as twice the distance between the most extreme points from the centre point considered in the Design of Experiment (DOE). The exponential form of the weight function is used in the present numerical study. The weight matrix W(x) can be constructed using the weighting function in diagonal terms as below:
3 Estimation of Extreme Wave Loading
Offshore structures are subjected to temporally and spatially varying random loads due to wind, wave, earthquake, ice and thermal gradient. The complexity of wind and earthquake load is compounded by the wave environment. The long-term behaviour of loads is nonstationary and due to nonlinear functional dependence, it is non-Gaussian as well [15]. The wave forces on the offshore structures depend on the characteristic of the wave environment and the geometric and dynamic properties of the structure. Morison et al. [16] proposed an empirical formula or the in-line force per unit length as
where \( F_{\text{I}} \) and \( F_{\text{D}} \) are the inertia and drag force, respectively; D is the diameter of a single column; \( {\rho } \) is the density of the seawater; \( \dot{U} \) is the fluid particle velocity; \( {{\ddot{U}}} \) is the fluid particle acceleration; \( C_{\text{M}} \) is the inertia coefficient; \( C_{\text{m}} \) is the hydrodynamic mass and \( C_{\text{D}} \) is the drag coefficient. The wave force can be rewritten as
where S1 is the level of equivalent force from the bottom of sea and S2 refers to the depth of the sea; L is the length of wave; D is the diameter of a single column; T is the time period of wave; t is the time step interval; and H is the maximum wave height.
3.1 Morison Equation for Flexible Members
The original Morison equation of Eq. (6) is modified for flexible or moving members, by replacing the absolute velocity by relative velocity and including an added mass term associated with the acceleration of the structure [17]. The modified equation is represented as
where \( \dot{Y} = \dot{U} - \dot{X} \) is the relative velocity and \( X(t) \) is the displacement in the direction of the wave propagation. The modified hydrodynamic load vector \( \bar{F}(t) \) may be obtained by aggregating the hydrodynamic load on each member. It includes the effect of inertia, drag and fluid–structure interaction.
\( \dot{U} \), \( \ddot{U} \) are the fluid particle velocity and fluid particle acceleration, respectively; \( A = \frac{\pi }{4}D^{2} \) and \( V = \frac{\pi }{4}D^{2} l \), where l is the length of a column.
4 Numerical Study
A single storied jack-up platform made up of steel plates is taken up to study the proposed RDO procedure. The structure is considered to be subjected to wave load with a maximum wave height of 3 m, and the corresponding wave period is taken as 8.25 s. The values of CM and CD are taken as 2 and 1, respectively, [18]. In this particular problem, DVs are taken as column diameter \( (d_{\text{c}} ) \) and bracing diameter \( (d_{\text{b}} ) \). The sections are tubular with uniform thickness of 25 mm. The uncertain DPs are maximum height of wave (Hmax), time period of wave (T), modulus of elasticity of steel (Es), unit weight of steel (γs), unit weight of seawater and weight of deck. The DVs and DPs are tabulated in Table 1. The mean values of the DPs are taken from Ref. [15]. Time period ‘T’ is assumed to be log-normally distributed [15], whereas all other parameters are assumed as random normal. The structure and the sea level are shown in Fig. 2. S2 = d = 25 m. SWL refers to the mean seawater level. The DDO is then formulated as

The jack-up platform
where δ and δal are the maximum top displacement and allowable displacement, respectively. δal is taken as (Hs/500), where Hs refers to the height of the structure.
The RDO has been performed by (i) the direct MCS framework, (ii) the MLSM-based RSM framework and (iii) the LSM-based RSM framework.
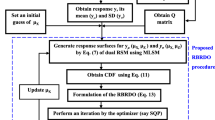
The DoE for generating the RSM approximation is performed by randomly generating 20 sampling points as per Latin hypercube sampling method. The RDO is executed by sequential quadratic programming routine available in MATLAB. The results are presented for varying reliability index in Figs. 3, 4, 5 and 6. The results obtained from the direct MCS, the conventional LSM-based RSM and the proposed MLSM-based RSM are shown in the same figure. The direct MCS result serves here as the benchmark for the comparison. In Fig. 3, optimal weight is plotted. The Coefficient of Variation (CoV) of optimal weight is presented in Fig. 4. It can be observed from these figures that the optimal weight and its CoV increase with increase in target reliability index. The trend is similar by all the three approaches. From Figs. 3 to 4, it can be observed that the optimal weight and the CoV of optimal weight by the MLSM-based RSM approach is in close conformity with the direct MCS-based approach. From Fig. 3, it can be observed that the results by the conventional LSM-based RSM approach are significantly deviated from the direct MCS results. Hence, the results by the LSM-based RSM seem to yield inaccurate design solutions, which may be even to the unsafe side inviting catastrophic failure consequences. This warrants the application of the LSM-based RSM in the RDO. The marginal deviation of the results by the MCS and the MLSM predictions is expected to be further reduced by taking more sample points, iterative improvement of the DoE which is under study at this stage. The CoV of the optimal weight (Fig. 4) obtained by the conventional LSM-based RSM approach is not only more (i.e. less robust) than the MLSM-based RSM results, but also not in agreement with the benchmark direct MCS results. The RDO results for different values of the parameter ‘α’ are presented in Fig. 5 showing the variation of the CoV of optimal weight with the weight factor. The inaccuracy with the conventional LSM-based RSM approach is pertinent here also. On the other hand, the MLSM-based RSM approach is in close agreement with the benchmark MCS solutions and more robust than the LSM-based RSM, as well. It can be further observed that the robustness (i.e. less CoV of the optimal weight) achievement is more for decrease in the value of ‘α’ from 1.0 to 0.0.

Optimal weight versus reliability index

CoV of optimal weight versus reliability index

CoV of optimal weight versus weight factor

The Pareto-optimal curve
It is generally observed that there is a trade-off between the objective values of a design and its robustness. If one desires more robustness, the design will be further away from its ideal optimal value. The situation can be studied further in terms of Pareto front [19]. The function space representation of the Pareto-optimal set is the Pareto-optimal front. When there are two objectives, the Pareto-optimal front is a curve, when there are three objectives, the Pareto-optimal front is represented by a surface and if there are more than three objectives, it is represented by a hypersurface. The Pareto-optimal front in multi-objective optimization problems is useful to visualize and assess trade-offs among different design objectives. In addition to identify compromise solutions, this also helps the designer to set realistic design goals. The Pareto front is one where any improvement in one objective can only occur through worsening of at least one other objective. If one chooses a design that is not Pareto-optimal, one essentially forfeits improvements that would otherwise entail no compromise. Thus, one of the important tasks in the RDO is to obtain the Pareto front. The Pareto fronts as obtained by the proposed and the conventional RDO approaches are plotted in Fig. 6. It can be readily observed from this figure that to achieve a specific level of variation in the desired objective (CoV of the weight here), the required weight by the proposed MLSM-based RSM approach is lesser than that by the conventional LSM-based RSM approach. On the other hand, for a prescribed weight of the structure, the CoV of optimal weight as obtained by the proposed MLSM-based RSM approach is lesser than that obtained by the conventional LSM-based RSM approach. Hence, more robust (i.e. lesser CoV) solutions are achieved by the proposed MLSM-based RSM approach, which is also more economic (i.e. lesser structural weight yielded by the proposed approach), as well. Moreover, the MLSM-based RSM results are in close conformity with the benchmark direct MCS solutions in comparison to the conventional LSM-based RSM results. Thus, more efficient Pareto front is obtained by the proposed MLSM-based RSM approach as compared to the conventional LSM-based RSM approach.
It has been observed that the direct MCS approach requires on an average 9 minutes, whereas the proposed MLSM-based RDO approach takes 15 seconds for producing a single solution of the RDO. The LSM-based RSM yields result in approximately 5 seconds. This endorses the computational efficiency of the proposed approach. The MLSM-based RSM approach takes more time than the LSM-based RSM since the former fits a new RSM curve for each of the iterations of the RDO.
5 Conclusions
An efficient RDO of offshore structure is presented under wave loading. The MLSM-based RSM approach is used in the present study to reduce the high computational time requirement by the direct MCS. It has been observed that with respect to the conventional deterministic design, the RDO yields 18% higher optimal weight considering uncertainty in load and other system parameters. The proposed MLSM-based RDO approach is not only computationally efficient but also acceptably accurate as evinced from the numerical study. The proposed MLSM-based RSM approach yields more efficient Pareto front than the conventional LSM-based RSM approach. The results indicate that by sacrificing a small increment in the structural weight designer can achieve robust and reliable design solution within affordable computational time by the proposed RDO approach. The proposed RDO method is valid and general approach for extending to other types of large offshore structures considering uncertainty. The RDO can reduce the sensitivity of several other responses of the supporting structure, such as stress. Thus, future research studies can be focused on vibration control and fatigue design using the RDO method.
References
Ashuri, T., & Zaaijer, M. B. (2007). Review of design concepts, methods and considerations of offshore wind turbines. In European Offshore Wind Conference and Exhibition, Berlin, Germany.
Blanco, M. I. (2009). The economics of wind energy. Renewable and Sustainable Energy Reviews, 13(6), 1372–1382.
Hezarjaribi, M., Bahaari, M. R., Bagheri, V., & Ebrahimian, H. (2013). Sensitivity analysis of jacket-type offshore platforms under extreme waves. Journal of Constructional Steel Research, 83, 147–155.
Wang, X. M., Koh, C. G., & Zhang, J. (2014). Substructural identification of jack-up platform in time and frequency domains. Applied Ocean Research, 44, 53–62.
Zhang, Y., & Lam, J. S. L. (2015). Reliability analysis of offshore structures within a time varying environment. Stochastic Environmental Research and Risk Assessment, 29, 1615–1636.
Yang, H., & Zhu, Y. (2015). Robust design optimization of supporting structure of offshore wind turbine. Journal of Marine Science and Technology, 20, 689–702.
Ziegler, L., Voormeeren, S., Schafhirt, S., & Muskulus, M. (2016). Design clustering of offshore wind turbines using probabilistic fatigue load estimation. Renewable Energy, 91, 425–433.
Haghi, R., Ashuri, T., van der Valk, P. L. C., & Molenaar, D. P. (2014). Integrated multidisciplinary constrained optimization of offshore support structures. Journal of Physics: Conference Series.
Chakraborty, S., & Bhattacharjya, S. (2012). Efficient robust optimization of structures subjected to earthquake load and characterized by uncertain bounded system parameters. Structural Seismic Design Optimization and Earthquake Engineering: Formulations and Applications.
Knoll, F., & Vogel, Th. (2009). Steel construction (Vol. 2, Issue 2, p. 147).
Augusto, O. B., Fouad Bennis, F., & Stephane Caro, S. (2012). Multiobjective engineering design optimization problems: A sensitivity analysis approach. Pesquisa Operacional, 32(3), 575–596.
Doltsinis, I., Kang, Z., & Cheng, G. (2005). Robust design of non-linear structures using optimization methods. Computer Methods in Applied Mechanics and Engineering, 194, 1779–1795.
Beyer, H. G., & Sendhoff, B. (2007). Robust optimization—A comprehensive survey. Computer Methods in Applied Mechanics and Engineering, 196(33–34), 3190–3218.
Taflanidis, A. A. (2012). Stochastic subset optimization incorporating moving least squares response surface methodologies for stochastic sampling. Advances in Engineering Software, 44, 3–14.
Nigam, N. C., & Narayanan, S. (1994). Applications of random vibrations. Berlin: Springer; New Delhi: Narosa Publishing House.
Morison, J. R., O’Brien, M. P., Johnson, J. W., & Schaaf, S. A. (1950). The forces exerted by surface waves on piles. Journal of Petroleum Technology, 189, 149–154 (The American Institute of Mining, Metallurgical, and Petroleum Engineers).
Berge, B., & Penzien, J. (1974). Three dimensional stochastic response of offshore towers to wave forces. In Proceedings Offshore technology Conference, Paper No. OTC 2050.
Agerschou, H., & Edens, J. (1965). Fifth and first order wave-force coefficients for cylindrical piles. In Proceeding of ASCE Coastal Engineering Specialty Conference (pp. 219–248), Santa Barbara, USA.
Deb, K. (2011). Multi-objective optimization using evolutionary algorithms: An introduction. KanGAL Report Number 2011003, Department of Mechanical Engineering Indian Institute of Technology Kanpur.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Datta, G., Bhattacharjya, S., Chakraborty, S. (2019). Adaptive Metamodel-Based Efficient Robust Design Optimization of Offshore Structure Under Wave Loading. In: Rao, A., Ramanjaneyulu, K. (eds) Recent Advances in Structural Engineering, Volume 1. Lecture Notes in Civil Engineering , vol 11. Springer, Singapore. https://doi.org/10.1007/978-981-13-0362-3_37
Download citation
DOI: https://doi.org/10.1007/978-981-13-0362-3_37
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-0361-6
Online ISBN: 978-981-13-0362-3
eBook Packages: EngineeringEngineering (R0)