
Abstract
The reliable real-time precise satellite orbit is the prerequisite and foundation of real-time precise positioning service for Global Navigation Satellite System. Recently, real-time precise orbit products are usually predicted from the post precise products that are determinate by the batch-processing method based on the history data. This method bears some obvious drawbacks that degrade the performance of real-time orbit products, especially for the Chinese BeiDou Satellite System (BDS). Firstly, the predicted orbit depends heavily on the accuracy of dynamic force model and responses slowly to the model accuracy degradation and variation. Secondly, the predicted precise orbit exhibits uncontinuity between two consecutive orbit arcs, which will affect the position accuracy. In this paper, the Square Root Information Filter (SRIF) method is adopted to update the satellite orbit in real-time and response quickly to orbit maneuver. The strategy is validated for the POD of GNSS satellites using one-month data. The results show that the 3D RMS of SRIF orbit for GPS and GLONASS satellites is 6.7 and 9.3 cm, respectively. The mean value of SLR validation residual for BDS IGSO and MEO satellites is less than 10 cm and for GEO satellite is about 20.7 cm. At last, the real time products were used to for kinematic PPP. The positioning results show that, compared to the predicted real time product, the real time product generated by the proposed real time filtering method improves the BDS-only kinematic positioning accuracy significantly and the accuracy of 3 cm in the horizon and 5 cm in height can be reached for the multi-GNSS positioning.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
GNSS technology has been committed to providing users with real-time, high-precision and high-reliability navigation services, especially in recent years, many countries and regions have been or are being established the real-time precise point positioning service system. High-precision satellite orbit is the prerequisite and guarantee for the global real-time positioning service system. There are two methods for real-time orbit determination. One is the orbital forecasting mode based on post-batch processing, the other is the filtering solution based on real-time data stream. The orbit prediction is realized based on the satellite dynamic model. First, the precise orbit states are determinated using post-batch processing, and then the satellite orbit is predicted based on the solved parameters by using numerical integration. The accuracy and reliability of such an orbit is heavily dependent on the stability of satellite motion and the force modelling, and as well as the predicting time. This strategy has been employed to generate the BDS orbit for the real-time positioning. Generally, the batch processing can achieve real-time orbit precision of decimeter level for IGSO and MEO, and about 1 m for GEO [1, 2]. However, when the satellite is during eclipsing season or maneuver period, it is hard to maintain the accuracy and reliability of the real-time orbit because the satellite dynamic is difficult to be modeled. This problem is more severe for BDS GEO satellites that have to keep pace with the Earth rotation by frequent maneuvers.
In principle, the filter-based real-time orbit determination strategy is superior to the traditional method at least in two ways. Firstly, this method can update the satellite orbit state as soon as the observation is obtained, so that the estimates can immediately reflect any unusual behaviour in satellite dynamics. Secondly, based on the real-time data stream, the estimated orbit using a filter is continuous and smooth over the whole filtering period, whereas orbit jumps between the consecutive arcs are inevitable in batch processing, especially for the BDS GEOs. Poor geometric condition and inaccurate solar radial pressure model may lead to 1 m jumps in the along-track direction [3].
In this paper, the square root information filter (SRIF) is used to determinate the satellite precise orbit in real-time. By using this method, the satellite orbit states are estimated in real-time which can avoid the accuracy degradation of the dynamic model predicted over time. The real-time GNSS orbits estimated by SRIF method are compared with the final products of IGS and MGEX ACs and analysed by the Satellite Laser Ranging (SLR) residuals. Finally, the SRIF real-time orbit products are validated by the real-time kinematic PPP.
2 Methodology
2.1 Square Root Information Filter
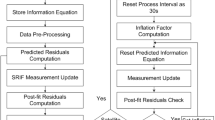
The SRIF is an improved Kalman filter method with high numerical accuracy and stability which is originally proposed by Bierman [4]. In its sequential recursive, an elementary Householder orthogonal transformation and a square root of the information matrix is employed. Generally, the SRIF process comprises of measurement and time update steps.
Assumed the normalized a priori information of the unknowns and linear measurement equations are:
By applying Householder transformation to Eq. (1), then
where T is an orthogonal transformation, \( \left\| e \right\|^{2} \) is the sum of squares residual error. The SRIF measurement update can be expressed as
The estimate state vector \( x \) is divided into determined parameters \( y \) and process parameters \( p \), then \( x = \left[ {\begin{array}{*{20}c} p & y \\ \end{array} } \right]^{T} \). The dynamic equations for process noise parameters can be written as:
where the covariance matrix of the process noise \( \varpi_{j} \) is \( Q_{j} = R_{{w_{j} }}^{ - 1} R_{{w_{j} }}^{ - T} ,m_{j} \) is the transition matrix and set \( M_{j} = R_{{w_{j} }} m_{j} ,w_{j} = R_{{w_{j} }} \varpi_{j} \). The SRIF time update can be expressed as:
2.2 Measurement and Orbit Models
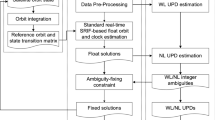
The real-time precise orbit determination software developed in this paper uses the SRIF method to simultaneously determine the orbit states of multi-GNSS satellites under the same space and time reference frame. The space and time reference frame, the dynamic model and the observed model are shown in Tables 1, 2 and 3.
3 Experiment and Result Analysis
In this paper, the post data were processed simulated in real-time to validate the algorithm and software. The data stream time delay which was exist in the real situation was regardless in this case. The experiments were performed on the precise orbit determination of GPS, GLONASS and Beidou satellites from DOY 039 to DOY 069 in 2015. The observations were from IGS, MGEX and BETS (Beidou Experimental Network) networks for a total of about 110 stations. The station distribution is shown in Fig. 1.

The station distribution
3.1 The Accuracy of Real-Time Orbit Solution
To evaluate the orbit accuracy, the GPS and GLONASS real-time orbit solutions are compared with the IGS final products, while the BDS real-time orbit is validated by the SLR data.
The real-time orbit solutions from 040, 2015 to 069, 2015 are used to assess the orbit accuracy, with the orbit during the convergence day excluded. Figure 2 presents the orbit accuracy of GPS and GLONASS in radial-, cross- and along-direction. As it is shown, the RMS of all GPS satellites is less than 7 cm, with the mean RMS of 2.9, 3.7 and 4.8 cm in the radial-, cross- and along-direction respectively. The orbit accuracy of GLONASS is comparable to that of GPS in radial-direction, and slight worse in another two directions, especially in cross-direction, with the largest RMS of about 12 cm. The mean RMS of all GLONASS satellites is 3.3, 4.2 and 7.6 cm in the radial-, cross- and along-direction, respectively. The statistical results show that orbit accuracy of GPS and GLONASS real-time orbit is comparable with that of the predicted part of IGS ultra-fast orbit products.

Accuracy of the GPS (up) and GLONASS (bottom) filtered orbit solutions
The real-time BDS orbit solutions and the least-squares post solutions from 040, 2015 to 069, 2015 are compared respectively with the SLR data to assess the orbit accuracy which is listed in Table 4. As shown in table, the standard deviation (STD) of the IGSO and MEO SLR residuals of the real-time orbit solutions is large than that of the post orbit solutions. Of all the satellites, C08 has the large SLR residuals, of which the bias and STD are −5.8 and 9.7 cm respectively. The mean bias of C10 and C11 SLR residuals is −2.2 and −0.4 cm. There is significant bias, about −20.7 cm, found in the SLR residual of the filtered GEO orbit solution, which is 21 cm smaller than the post solutions, same as the STD. In real-time POD, the process noise is introduced to reduce the effect of force model error and increase the weight of observations may contribute to the improvement compared to the post solution. To further reduce the GEO SLR residuals, more accurate solar radiation pressure is needed.
3.2 Analysis of the Real-Time Orbit Series
To assess the accuracy of real-time orbit solutions, the orbit difference series of real-time orbit solution and reference orbit is analyzed too.
Figure 3 presents the orbit difference series of GPS and GLONASS in the along-, cross- and radial-direction from 039, 2015 to 044, 2015. As it is shown in the figure, after convergence, the orbit difference of GPS is between ±10 cm in the cross- and radial-direction, and between ±20 cm in the along-direction. GLONASS has larger orbit differences than GPS in all directions, of which the orbit differences of most satellites are between ±10 cm in the radial- and cross-direction, and the orbit difference in the along-direction is up to 40 cm. Further analysis shows that, the R11, R12, R14 and R16 satellites, having rather larger orbit differences in the POD period, are eclipse satellites. The orbit differences exhibit significant jumps in the along- and cross-direction around the day boundary, especially for the eclipse satellite. Since the filtered orbits are continuous, the jumps in orbit differences result from the IGS reference orbits. Thus, orbit error of the reference solutions and filtered solutions becomes larger for the eclipse satellites which contributes to the apparent larger orbit differences than the other satellites.

Orbit difference series of GPS (left) and GLONASS (right)
Recently, the GNSS Research Center of Wuhan University has been providing the precise final products (code is WUM) for GPS, GLONASS, BDS and GALILEO. The filtered orbits are compared with the WUM products to compute the orbit differences in along-, cross- and radial-direction which are shown in Fig. 4. As it is shown, the orbit differences with WUM are the largest in along-direction, and the smallest in radial-direction. As the filter progresses, the orbit differences between filtered solution and WUM final products become smaller. As the WUM final products are the 1-day solutions, the orbit differences exhibit apparent jumps as much as 80 cm around the day boundary. The filtered solutions of BDS IGSO and MEO exhibit good continuity, of which the orbit differences converge to stable status as the filter progresses. After convergence, the orbit accuracy of the filtered solutions is about 10–20 cm.

Orbit differences between the filtered solutions and the WUM final products for BDS GEO (left), IGSO and MEO (right)
4 PPP Validation of the Filtered Orbit Products
In order to validate the positioning performance of the filtered real-time precise orbit products, the filtered orbits and predicted orbits are used to estimate precise satellite clock corrections with the same stations in POD. Two sets of products are respectively used to carry out kinematic PPP, and the positioning results are compared with the static PPP solution of the IGS post products. The E/N/U series are shown in Fig. 5. It can be seen from the figure that the multi-GNSS kinematic PPP solutions of the two schemes are superior to the GPS-only solutions in terms of accuracy and convergence speed, mainly because multi-GNSS can increase the available satellite number and improve the geometric conditions dramatically. For MROI station, the GPS and BDS combined solution shows apparent improvements in three directions, especially in the U direction, with an improvement of 36% for scheme 1 and 21% for scheme 2. The GPS-only PPP solutions have comparable accuracy for the two schemes, while the BDS-only solution of scheme 1 is better than that of scheme 2, with the improvements of 39, 66 and 38% in E, N and U directions, because the predicted BDS orbit is rather worse. The GPS and BDS combined solutions of scheme 1 are better than that of scheme 2, with the accuracy of 1.6, 1.1 and 3.4 cm in E/N/U directions, which demonstrate that the filtered real-time products are capable to support real-time PPP application.

Different kinematic PPP series in E/N/U directions (left: filtered products, right: predicted products)
5 Conclusions
In this paper, the real-time orbit of satellite is determined by the SRIF method based on real-time observation data to generate high-precision real-time orbit, which effectively solves the problem that the precision of satellite dynamics model degrades with time. The experimental results show that the three-dimensional accuracy of real-time orbits of GPS and GLONASS are 6.7 and 9.3 cm, respectively. The mean bias of SLR residuals of the BDS IGSO and MEO real-time orbit is within 10 cm, while that of the GEO satellites is 20.7 cm, with an improved of 20 cm, compared with the post orbit solutions. After convergence, the filtered orbit exhibits better continuity in time, which can avoid inconsistencies between two arcs in the predicted orbit. At the same time, the filtered orbit can detect and response to the satellite orbit maneuver events in real-time. Based on the filtered real-time orbit product, the real-time PPP solution is improved by 2 cm, 3.5 cm, and 4.6 cm in E/N/U directions respectively, which demonstrate the filtered real-time orbit products can provide reliable and precise real-time positioning service.
References
Li X, Ge M, Dai X, Ren X, Fritsche M, Wickert J, Schuh H (2015) Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geod 89(6):607–635
Tegedor J, de Jong K, Liu X, Vigen E, Øvstedal O (2015) Real-time precise point positioning using BeiDou. In: Rizos C, Willis P (eds) IAG 150 Years, International Association of Geodesy Symposia, vol 143. Springer, Cham
Ma H, Zhao Q, Xu X (2017) A new method and strategy for precise ultra-rapid orbit determination. In: China satellite navigation conference (CSNC) 2017 Proceedings, vol III. pp 191–205
Bierman GJ (1977) Factorization methods for discrete sequential estimation. Academic press, New York
Rodriguez-Solano C, Hugentobler U, Steigenberger P, Lutz S (2011) Impact of earth radiation pressure on GPS position estimates. J Geod 86:309–317. doi: http://www.doi.org/10.1007/s00190-011-0517-4
Wu J, Wu S, Hajj G, Bertiger W, Lichten S (1993) Effects of antenna orientation on GPS carrier phase. Manuscripta Geodaetica 18:91–98
Acknowledgements
This work is supported by National Key Research and Development Program of China (No.2016YFB0501802).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Dai, X., Dai, Z., Lou, Y., Li, M., Qing, Y. (2018). The Filtered GNSS Real-time Precise Orbit Solution. In: Sun, J., Yang, C., Guo, S. (eds) China Satellite Navigation Conference (CSNC) 2018 Proceedings. CSNC 2018. Lecture Notes in Electrical Engineering, vol 498. Springer, Singapore. https://doi.org/10.1007/978-981-13-0014-1_27
Download citation
DOI: https://doi.org/10.1007/978-981-13-0014-1_27
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-0013-4
Online ISBN: 978-981-13-0014-1
eBook Packages: EngineeringEngineering (R0)