
Abstract
Peristaltic transport of a micropolar fluid is investigated in the view of an electric field. Debye-Hückel linearization is employed to simplify the problem, and electrical double layer (EDL) is considered very thin so that the effect of applied electric field is represented in terms of the electroosmotic slip velocity (i.e., Helmholtz–Smoluchowski velocity) at the channel walls. Axial velocity is achieved in the form of closed expression through low Reynolds number and long wavelength approximations. The effects of electric field and coupling number are shown by plotting graphs based on computational results. It is found that the axial velocity enhances with the electric field applied in the flow direction and diminishes with the electric field applied against the flow direction.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The fluid flow induced by periodic contraction and relaxation of the wall of the conduit carrying a fluid is termed as peristaltic transport. Naturally, peristaltic transport occurs in the flow of urine from the kidney to the bladder, chyme in the gastrointestinal tract, food bolus through the esophagus, ovum in the female fallopian tube, and blood through small blood vessels. This principle is used in industry to develop roller and finger pumps to make the flow of the fluids like foods, slurries, corrosive fluids, and blood without being contaminated due to contact with pumping machinery. First, Chakraborty [1] investigated electroosmotic augmented peristaltic transport considering thin electric double layer (EDL) where the effects of charged surface, i.e., EDL phenomenon, are assumed negligible. Later on, several researchers [2,3,4,5] made improvements in this study considering EDL effects, MHD effects, power-law fluids, and couple stress fluids. In these studies, it is concluded that peristaltic pumping can be enhanced with applied external electric field. The literature lacks with the study of electroosmotic modulated peristaltic pumping of a micropolar fluid. Micropolar fluid represents the randomly oriented particles suspended in a viscous medium. It is applicable in physiological fluids transport where the suspension of particles plays an important role like in blood (suspension of RBC, WBC, and platelets). The concept of a micropolar fluid was first presented by Eringen [6]. After that, some researchers investigated peristaltic transport of a micropolar fluid [7,8,9,10,11]. In these studies, the effects of coupling parameter and micropolar parameter on peristaltic flow characteristics are discussed.
In this paper, electroosmotic augmented peristaltic transport of a micropolar fluid via a channel with sinusoidal wave trains traveling down has been discussed. Debye-Hückel linearization is employed to simplify the problem, and electrical double layer (EDL) is considered very thin so that the effect of applied electric field is represented in terms of the electroosmotic slip velocity (i.e., Helmholtz–Smoluchowski velocity) at the channel wails. Axial velocity is achieved in the form of closed expression through low Reynolds number and long wavelength approximations.
2 Mathematical Statement of Problem
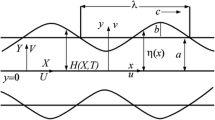
We have taken the electroosmotic augmented peristaltic transport of an incompressible micropolar fluid via a microfluidic channel of width \( 2a \). Let \( Y = {\pm} H \) be the outer and inner boundaries of the channel. The movement is thought to be incited by sinusoidal wave trains spreading through the channel dividers with a steady speed \( c \). The schematic diagram of the problem under consideration is depicted in Fig. 1 and mathematically considered as:
where \( b \) is a wave amplitude, \( \lambda \) is a wave length, and \( t^{\prime } \) is the time. The stream is precarious in the laboratory outline \( \left( {X^{\prime } ,Y^{\prime } } \right) \), while it is consistent if seen in the coordinate system \( \left( {x^{\prime } ,y^{\prime } } \right) \), named as wave frame, moving through the wave speed \( c \). The changes between aforesaid two coordinate systems have been expressed as:
where \( \left( {u^{\prime } ,v^{\prime } } \right) \) and \( \left( {U^{\prime } ,V^{\prime } } \right) \) are the speed segments that are considered as part of wave and laboratory frames.

Schematic diagram of physical problem
Without body forces and the body couple, the representing conditions for the steady flow of an incompressible micropolar fluid driven by combined effects of peristaltic pumping and electroosmosis are expressed by
where \( u^{\prime } \) and \( v^{\prime } \) are the velocity segments in the corresponding \( x^{\prime } \) and \( y^{\prime } \) directions, \( \rho \) is the thickness of the liquid, \( p^{\prime } \) is the pressure, \( w^{\prime } \) is the microrotation speed component in the direction normal to both the \( x^{\prime } \) and \( y^{\prime } \) axes, \( J^{\prime } \) is the micro-inertia constant, \( \mu \) is the viscosity constant of the classical fluid dynamics, \( \kappa ,\gamma \) are the viscosity constants for micropolar fluid, \( E_{x} \) is the outer electric field.
For further examination, we utilize the accompanying non-dimensional factors and parameters:
where \( {Re} \), \( \delta \) and \( c \) represent the Reynolds number, wave number, and wave velocity, respectively. For thin EDL and weal electric field, the electrokinetic body force term may be dropped from momentum equation and it can be realized in terms of the electroosmotic slip velocity at the wall. Employing the non-dimensional variables in Eqs. (3–6) and using the low Reynolds number and long wavelength approximations, we get:
where \( N = \kappa /\left( {\mu + \kappa } \right) \) is the coupling number \( \left( {0 \le N \le 1} \right) \), \( M^{2} = a^{2} \kappa \left( {2\mu + \kappa } \right)/\left( {\gamma \left( {\mu + \kappa } \right)} \right) \) is the micropolar parameter. The boundary conditions are imposed as:
- \( U_{HS} \) :
-
is electroosmotic slip velocity.
Solving simultaneous partial differential Eqs. (9) and (11), with boundary conditions (12), the axial velocity is obtained as:
3 Result and Discussion
In this section, graphs are drawn showing effects of electroosmotic slip velocity and coupling number on axial velocity based on numerical results. Figure 2 shows the effect of electroosmotic slip velocity on axial velocity at \( \phi = 0.6,\,x = 1,\,{\text{d}}p/{\text{d}}x = - 5,\,M = 2,\,N = 0.1 \). From Fig. 2, it is observed that the fluid velocity enhances with the electric field applied in the flow direction but diminishes with the electric field applied against the flow direction. Figure 3 shows the variation in axial velocity with coupling number at \( \phi = 0.6,\,x = 1,\,{\text{d}}p/{\text{d}}x = - 5,\,M = 2,\,U_{HS} = 1 \). From Fig. 3, it is observed that the fluid velocity decreases with increase in coupling number.

Velocity profile at \( \phi = 0.6,\,x = 1,\,{\text{d}}p/{\text{d}}x = - 5,\,M = 2,\,N = 0.1 \) for different values of \( U_{HS} \)

Velocity profile at \( \phi = 0.6,\,x = 1,\,{\text{d}}p/{\text{d}}x = - 5,\,M = 2,\,U_{HS} = 1 \) for different values of \( N \)
4 Conclusion
-
The fluid velocity can be controlled by applying external electric field.
-
The fluid velocity enhances with the electric field applied in the flow direction.
-
The fluid velocity diminishes with the electric field applied against the flow direction.
The fluid velocity decreases with the increase in the coupling number.
References
Chakraborty, S.: Augmentation of peristaltic microflows through electro-osmotic mechanisms. J. Phys. D Appl. Phys. 39(24), 5356 (2006)
Goswami, P., Chakraborty, J., Bandopadhyay, A., Chakraborty, S.: Electrokinetically modulated peristaltic transport of power-law fluids. Microvasc. Res. 103, 41–54 (2016)
Tripathi, D., Bhushan, S., Bég, O. A.: Transverse magnetic field driven modification in unsteady peristaltic transport with electrical double layer effects. Colloids Surf A Physicochem. Eng. Asp. (2016)
Tripathi, D., Mulchandani, J., Jhalani, S.: Electrokinetic transport in unsteady flow through peristaltic microchannel. In: 2nd International Conference On Emerging Technologies: Micro To Nano, Contributory Papers Presented in 2nd International Conference on Emerging Technologies: Micro to Nano 2015, vol. 1724, No. 1, p. 020043. AIP Publishing (2016)
Shit, G.C., Ranjit, N.K., Sinha, A.: Electro-magnetohydrodynamic flow of biofluid induced by peristaltic wave: a non-Newtonian model. J. Bionic Eng. 13(3), 436–448 (2016)
Eringen, A.C.: Theory of micropolar fluids (No. RR-27). Purdue University Lafayette in School Of Aeronautics and Astronautics (1965)
Pandey, S.K., Tripathi, D.: Unsteady peristaltic flow of micro-polar fluid in a finite channel. Zeitschriftfür Naturforschung A 66(3–4), 181–192 (2011)
Tripathi, D., Chaube, M.K., Gupta, P.K.: Stokes flow of micro-polar fluids by peristaltic pumping through tube with slip boundary condition. Appl. Math. Mech. 32(12), 1587–1598 (2011)
Akbar, N.S., Nadeem, S.: Peristaltic flow of a micropolar fluid with nano particles in small intestine. Appl. Nanosci. 3(6), 461–468 (2013)
Shit, G.C., Roy, M.: Effect of slip velocity on peristaltic transport of a magneto-micropolar fluid through a porous non-uniform channel. Int. J. Appl. Computat. Math. 1(1), 121–141 (2015)
Ravi Kiran, G., Radhakrishnamacharya, G., Anwar Bég, O.: Peristaltic flow and hydrodynamic dispersion of a reactive micropolar fluid-simulation of chemical effects in the digestive process. J. Mech. Med. Biol., p. 1750013 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chaube, M.K. (2018). Role of Electric Field on Peristaltic Flow of a Micropolar Fluid. In: Tiwari, B., Tiwari, V., Das, K., Mishra, D., Bansal, J. (eds) Proceedings of International Conference on Recent Advancement on Computer and Communication . Lecture Notes in Networks and Systems, vol 34. Springer, Singapore. https://doi.org/10.1007/978-981-10-8198-9_29
Download citation
DOI: https://doi.org/10.1007/978-981-10-8198-9_29
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-8197-2
Online ISBN: 978-981-10-8198-9
eBook Packages: EngineeringEngineering (R0)