
Abstract
Engineers associated with construction of tunnels in weak rocks are frequently met with geotechnical problems like instability of tunnels, yielding of the rock mass and excessive deformations due to squeezing. The problems are induced due to redistribution of in situ stresses around tunnel periphery caused by excavation of the tunnel. It is a challenging task to have proper understanding of the geotechnical issues before starting the excavation. The present chapter discusses some of the most challenging geotechnical issues which can be resolved in advance with characterisation of the rock mass at the site. These issues include assessing rock mass strength subject to given confining pressure for unreinforced and bolted rock mass, assessment of squeezing potential, assessment of tunnel deformation and expected support pressure. If adequate understanding on these issues is available with the designers, proper strategies may be formulated to handle problems at construction stage.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Geotechnical engineers working in hydropower and transportation engineering sectors often deal with construction of tunnels in rocks. During planning, design and construction of tunnels, geotechnical engineering plays the most important role as an inadequate understanding of geotechnical aspects may result in serious cost implications. The geology in the Himalayan region is extremely fragile and full of surprises. The rock masses invariably exhibit structural discontinuities like joints, bedding planes, foliations, shear zones and varying degree of weathering. The rock masses are characterised with low strength, high deformability and anisotropy in engineering behaviour. Tectonic stresses are always present in the region. The stress regime changes due to excavation of tunnel, and a complex interaction of rock mass and tunnels support occurs. It is very important to foresee the problems likely to be caused due to redistribution of stresses. Once the expected engineering behaviour is adequately predicted, the strategies can then be formulated to cope up with the problems at the construction stage.
In general, it is common to use the term “weak rock” to represent the behaviour of the “rock mass” as a whole. The overall behaviour of the rock mass is governed jointly by the characteristics of intact rock substance and the geological discontinuities present in the rock mass. In addition, the scale of the problem affects the behaviour of the tunnel in the rock mass.
The basic aim of the geotechnical design in tunnelling is to utilise the rock itself as a principal structural material without creating much disturbance during excavation process with minimum addition of concrete and steel support. The instability may be due, but not limited, to: (a) geological structural features, i.e. joints, foliations, bedding planes, shear zones and faults, (b) excessive high stresses due to tectonic activity, (c) weathering of rock materials or swelling minerals and (d) excessive ground water pressure. The potential failure mechanism plays key role in geotechnical design of the tunnels. The failure may be due to structurally controlled failure mechanism which prevails at shallow depths where structural discontinuities, e.g. joints, bedding planes and foliations dominate the engineering behaviour. Stress-induced failure occurs at relatively greater depths.
The Himalayan geology is so varying and full of surprises that it is never possible to get full information in advance. Though preliminary investigations are done at the initial stage itself, it is very challenging at the tender stage to exactly quantify the problems likely to be encountered during tunnel construction. The geotechnical model needs to be updated during construction and adequate arrangements are required to accommodate the changes in the support system as the construction progresses. Sufficient understanding and comprehension is required at the design stage itself before starting the construction. Some of the challenges to be handled by the geotechnical engineers, especially for weak rock masses, are as follows:
-
i.
Determination of stresses around tunnels,
-
ii.
Rock mass strength, failure criteria for jointed rocks and behaviour of jointed rocks reinforced with rock bolts,
-
iii.
Assessment of squeezing potential,
-
iv.
Assessment of tunnel closure,
-
v.
Assessment of ultimate support pressure.
The present chapter discusses how reliable estimates of geotechnical design parameters can be made at the design stage itself to tackle the problems during construction. This chapter is focussed on characterisation and classification-based approaches which are simple in use in the field. In addition, this chapter concerns the instability issues only. Seepage problems, numerical analysis, detailed design of support system and construction strategies in the field are beyond the scope of the present chapter.
2 Stresses Around Tunnels
Excavation of tunnel disturbs the in situ stress state and redistributes stresses around the tunnel periphery. Closed-form solutions are available for standard shapes of tunnels to get stress distribution around tunnels (Obert and Duvall 1967). Figure 1 shows typical variation of radial and circumferential stresses in an elastic rock mass due to excavation of a circular tunnel in a rock mass subjected to hydrostatic stress state. Hoek (2007) has discussed how deformation and displacements occur as construction progresses. It is observed by Hoek (2007) that the radial displacement starts at a distance equal to about one half the tunnel diameter ahead of the advancing face and reaches its final value at about one and half tunnel diameter behind the face. The tunnel deformation analysis can be done if the rock mass properties and in situ stress values are known. A simple analysis of tunnel deformation for a circular tunnel (Fig. 2) subject to hydrostatic in situ stress (p o) and internal support pressure (p i) is given by Hoek (2007). For simplicity, a linear failure criterion was assumed for the rock mass as follows:

Stress distribution around a circular tunnel (in situ stresses: hydrostatic)

A circular tunnel subject to internal pressure and hydrostatic in situ stress
where σ cm is the uniaxial compressive strength of the rock mass given as follows:
and k is the slope of σ 1 versus σ 3 line and is given as follows:
σ 1 is the major principal stress at failure; σ 3 is confining stress at failure; and c and ϕ are Mohr–Coulomb shear strength parameters.
If the internal support pressure p i is sufficiently large (greater than the critical support pressure p cr), no failure occurs, and the behaviour of the rock mass surrounding the tunnel is elastic. The critical support pressure can be obtained as follows (Hoek 2007):
However, if the internal support pressure is not sufficient enough, the rock mass fails and the radius r p of the plastic zone around the tunnel may be obtained as follows:
The total inward radial displacement of the tunnel wall, u ip, may be obtained as follows:
where E and ν are modulus of elasticity and Poisson’s ratio of the rock mass.
For designing appropriate support system, rock mass–tunnel support interaction analysis is carried out for the particular support system adopted. A case of squeezing ground condition is presented in Fig. 3 (Hoek and Brown 1982). The plot shows variation of support pressure, p, with tunnel wall displacement, u. If the support system is too flexible, it will offer relatively little resistance even after deforming to very large extent. On the other hand, if the support system is too stiff, it will attract very high stresses and may yield. It is not only important to have a proper type of support; equally important is the decision when to apply the support. If the supports are employed too early, they will attract high stresses and may yield. If the supports are too delayed, large deformations would have occurred and rock mass would have failed. For a proper economical, safe and efficient design, the supports installed should be neither too early, nor too late and at the same time, neither too rigid nor too stiff compared with the stiffness of the rock mass.

Rock mass–tunnel support interaction analysis (Hoek and Brown 1982)
3 Rock Mass Strength and Failure Criteria
While performing rock mass–tunnel support interaction analysis, the designer needs to assess the rock mass strength subject to the prevailing confining pressure. An accurate determination of the rock mass strength is therefore the backbone of the analysis and design. In the simple analysis presented in the preceding section, simple linear strength behaviour of the rock mass was considered. In reality, the strength behaves in a nonlinear manner; i.e. the principal stress at failure is a nonlinear function of confining pressure. A suitable nonlinear strength criterion is used for this purpose. A number of strength criteria are available in the literature (Hoek and Brown 1980; Ramamurthy 1993; Ramamurthy and Arora 1994; Singh and Singh 2012), and the use of any criterion may be a matter of choice. The criterion should, however, be simple in use; its parameters should carry physical meaning, and the designer should be able to easily obtain these parameters. The criterion parameters should be robust; i.e. their values should not vary when amount of input data, which is given to obtain input parameters, is varied. Conventional Mohr–Coulomb failure criterion (linear form) is the most widely used failure criterion and fulfils the requirement of an ideal failure criterion except that it is linear criterion. This criterion has been extended to take care of nonlinearity in strength behaviour, and modified Mohr–Coulomb (MMC) criterion has been suggested (Singh and Singh 2005, 2012; Singh et al. 2011, 2015; Singh 2016). It is reported that the MMC criterion parameter ϕ is the most robust (Shen et al. 2014) parameter as compared to other criterion parameters. A brief description of the MMC criterion is presented in the following.
3.1 Modified Mohr–Coulomb (MMC) Criterion for Jointed Rocks
The MMC criterion derives its base from Barton’s critical state concept for rocks. A rock tested under low confining pressure fails in a dilatant and brittle manner due to opening up of the pre-existing microcracks resulting in high value of instantaneous friction angle ϕ. For tests at higher confining pressure, the tendency of dilation is suppressed and the failure mechanism shifts from brittle to ductile and a relatively lower value of ϕ is obtained. If confining pressure is increased further, the rock becomes completely ductile; at sufficiently high confining pressure, the rock enters the critical state (Fig. 4). The tangential gradient of the envelope is steep at low confining pressure and tends to become asymptotic to a horizontal line at critical state. Barton (1976) states “critical state for an initially intact rock is defined as the stress condition under which Mohr envelope of peak shear strength of the rocks reaches a point of zero gradient. This condition represents the maximum possible shear strength of the rock. For each rock, there will be a critical effective confining pressure above which the shear strength cannot be made to increase”. This characteristic of Mohr failure envelope approaching horizontal has been used to define the correct shape of the failure criterion (Singh and Singh 2005; Singh et al. 2011, 2015; Singh 2016), and the conventional Mohr–Coulomb criterion was modified to incorporate nonlinearity in strength behaviour. Based on statistical back analysis of large number of triaxial test data, it was also shown by Singh et al. (2011) that for the application of MMC criterion, the critical confining pressure of an intact rock may be taken nearly equal to its UCS, σ ci. The modified Mohr–Coulomb (MMC) criterion was thus expressed as follows:

Barton’s critical state concept for rocks (Singh et al. 2011)
where σ 1 is the major principal stress at failure; σ 3 is the minor principal stress at failure; \( \phi_{\text{i0}} \) is the friction angle of intact rock at very low confining pressure (σ 3 → 0); and σ ci is UCS of the intact rock given as follows:
where c i is the cohesion of the intact rock.
The expression for differential stress at failure (σ 1 − σ 3) is applicable up to critical confining pressure σ 3 = σ ci. Beyond this point, the differential stress (σ 1 − σ 3) becomes constant as per the critical state concept (Barton 1976).
Figure 5 shows results from triaxial tests conducted on jointed rock by Brown (1970). The variation of shear strength indicates that jointed rocks also follow critical state concept. It is observed that at sufficiently high confining pressure the Mohr failure envelopes of jointed and intact rocks merge with each other. Singh and Singh (2012) employed the critical state concept to suggest a nonlinear strength criterion for jointed rocks. The suggested strength criterion for jointed rock along with the failure criterion of intact rock is shown in Fig. 6. Based on analysis of a compiled database comprising of more than 730 triaxial test data for a variety of rocks (σ ci = 9.5–123 MPa) from the worldwide literature, Singh and Singh (2012) suggested that critical confining pressure of jointed rocks may also be taken nearly equal to UCS of intact rock, σ ci, for the application of the proposed criterion. Consequently, the MMC criterion “single parameter form” for jointed rocks was expressed as follows:


Modified Mohr–Coulomb criteria for intact and jointed rocks (Singh and Singh 2012)
where σ cj is the UCS of the rock mass; ϕ j0 is the friction angle of the rock mass corresponding to very low confining pressure range (σ 3 → 0) and can be obtained as follows:
where SRF is strength reduction factor = σ cj/σ ci.
Few triaxial tests on intact rock are required to get parameter ϕ i0. If triaxial test data on intact rock is not available, the following nonlinear form of the criterion may be used as an alternative (Singh and Rao 2005a):
where A j is an empirical criterion parameter and may be estimated from the experimental value of σ ci, using the following expressions:
The designer may use the lower bound prediction. However, a parametric analysis by varying the strength values from low to average prediction gives a good insight into behaviour of the rock mass.
3.1.1 Assessment of σ Cj in Field
An important input to the MMC criterion is the UCS of the rock mass, σ cj. The values of σ ci and ϕ i0 will be available from laboratory tests on intact rocks; however, determination of σ cj is a difficult task. Major factors that govern σ cj are intact rock strength σ ci, discontinuity characteristics, kinematics and possible failure mode. Rock mass classification systems are frequently used in the field to assess the rock mass strength. Table 1 presents some of the approaches available from the literature. Amongst rock mass classification systems, the Q system is widely used for tunnelling projects in India. The following expressions may be used to assess σ cj from Q:
Singh et al. ( 1992 )
Barton ( 2002 )
where γ is the unit weight of the rock mass in gm/cc and σ cj and σ ci are in MPa.
It may be noted that the best estimates of rock mass strength, σ cj, can only be made in the field through large-size field-testing by loading the mass up to failure. It is, however, extremely difficult, time consuming and expensive to load a large volume of jointed mass in the field up to ultimate failure. Singh (1997), Singh and Rao (2005b) have discussed that a better alternative is to get the deformability properties of rock mass by stressing a limited area of the mass up to a certain stress level and then relate the ultimate strength of the mass to the laboratory UCS of the rock material through a strength reduction factor, SRF. It has been shown by Singh and Rao (2005b) that when jointed rock positions are plotted on Deere and Miller (1966) classification chart, the points lie around an empirical line passing through the intact rock position (Fig. 7). The gradient of this empirical line defines a correlation between strength and modulus values of intact and jointed rocks. The modulus reduction factor, MRF, and the strength reduction factor, SRF, are correlated with each other by the following expression approximately:

Jointed rock positions on Deere–Miller classification chart (Singh and Rao 2005b)
where SRF is the ratio of rock mass strength to the intact rock strength; MRF is the ratio of rock mass modulus to the intact rock modulus; σ cj is the rock mass strength; σ ci is the intact rock strength; E j is the elastic modulus of rock mass; and E i is the intact rock modulus available from laboratory tests.
The elastic modulus of rock mass, E j, may be obtained in the field by conducting uniaxial jacking tests (IS:7317 1974) in drift excavated for the purpose. The test consists of stressing two parallel flat rock faces (usually the roof and invert) of a drift by means of a hydraulic jack (Mehrotra 1992). The stress is generally applied in two or more cycles, and the second cycle of the stress deformation curve is recommended for computing the field modulus as follows:
where E j is the elastic modulus of the rock mass in kg/cm2; \( \nu \) is Poisson’s ratio of the rock mass (=0.3); P is the load in kg; δ e is the elastic settlement in cm; A is the area of plate in cm2; and m is an empirical constant (=0.96 for circular plate of 25 mm thickness).
The results obtained through this approach are likely to be more realistic as inputs are directly derived from the field data. The size of the drift should be sufficiently large as compared to the plate size so that there is little effect of confinement. The confinement may result in overprediction of the modulus values.
3.2 Effect of Rock Bolting on Rock Strength
Rock bolts are widely used to reinforce the rock mass for stabilising tunnels. Numerical methods are the best answer to assess strength of bolted rock. However, numerical modelling is relatively expensive and time consuming and should therefore be preferred at the final stage of design. Srivastava and Singh (2015) have suggested a simple empirical approach to assess approximately the strength of fully grouted passive rock bolts. The approach is based on outcome of laboratory tests conducted on jointed rock specimens with and without rock bolts. The rock mass strength is considered to be governed by the shear strength of the joints present in the mass. The shear strength of a single joint in the mass (without rock bolt) is expressed as follows:
where c j = cohesion of the joint and ϕ j = friction angle of the joint.
When rock mass is reinforced with bolts, the strength of a series of joints in the mass is represented as follows:
where c j_mass and ϕ j_mass are the cohesion and friction angle along joints in the mass.
It was observed by Srivastava and Singh (2015) that when rock mass is reinforced with fully grouted rock bolts, there is substantial improvement in the cohesion of the joints; however, the friction angle remains almost unchanged. The cohesion enhancement (CE) caused by bolting was expressed as follows:
where c j_mass is the cohesion of series of joint in mass and c j is the cohesion of a single joint.
The cohesion enhancement is a measure of improved shear strength of joints which depends on the amount of steel, geometry of rock mass and configuration of bolt pattern. The amount of steel was represented by the term per cent area ratio, A r, given by the following:
where A b = total cross section area of bolts and A = area of mass on shearing plane.
While considering geometry, the representative rock block dimension (D b) and bolt spacing (S b) were found to affect the strength enhancement. If the block dimension is small and bolt spacing is large, the enhancement will be low, whereas if the block dimension is large and the bolt spacing is relatively small, the enhancement can be expected to be high. To account for the importance of the block dimension and bolt spacing, a number N (spacing ratio) was defined as follows:
where \( S_{\text{b}} = \sqrt {({\text{Area}}\;{\text{of}}\;{\text{shearing}}\;{\text{plane}})/({\text{Number}}\;{\text{of}}\;{\text{bolts}})} \), \( D_{\text{b}} = ({\text{volume}}\;{\text{of}}\;{\text{representative}}\;{\text{block}})^{1/3} \).
The cohesion enhancement due to provision of rock bolts was obtained from laboratory test data and was plotted (as a fraction of intact rock cohesion) against the quantity A r/N. The following correlation was obtained for the cohesion enhancement for the given amount of steel, bolt spacing and representative rock block dimension:
A ready-to-use chart was produced by Srivastava and Singh (2015) to assess the cohesion enhancement (Fig. 8) depending on amount of steel, bolt spacing and representative block dimension. The cohesion enhancement can be readily used to find out the enhanced rock mass strength σ cj in MMC criterion for incorporating the effect of rock bolts on strength behaviour of rock mass.

Chart for computing cohesion enhancement (Srivastava and Singh 2015)
4 Assessment of Squeezing Potential of Tunnels in Weak Rocks
Squeezing of tunnels is a common phenomenon in tunnels excavated in weak rocks. Barla (2001) has defined squeezing as large time-dependent convergence during tunnel excavation. A particular combination of induced stresses and material properties may induce squeezing conditions. Excessive deformations may occur and continue over a long period of time. Identification of squeezing potential is the first step towards the successful design and construction of tunnels in weak rocks. Some of the approaches used for identifying the squeezing potential are presented in brief in the following sections. The approaches have been grouped into two broad categories, i.e. empirical and semi-empirical approaches.
4.1 Empirical Approaches
4.1.1 Singh et al. (1992) Approach Based on Q System
Singh et al. (1992) analysed 39 case histories, on squeezing and non-squeezing conditions, and plotted tunnel depth against rock mass quality Q (Barton et al. 1974). A clear-cut demarcation line differentiating squeezing cases from non-squeezing cases was observed, and the condition for squeezing found as follows:
where H is tunnel depth in m.
4.1.2 Goel et al. (1995) Approach Based on Rock Mass Number
Difficulty is generally faced in assigning correct rating to the parameter SRF in Q system. To avoid this problem, Goel et al. (1995) suggested a rock mass number N, defined as stress-free Q; i.e. Q with SRF = 1.
Considering the tunnel depth H (m), the tunnel span or diameter B (m) and the rock mass number N from 99 tunnel sections, Goel et al. (1995) plotted the available data on a log–log diagram between N and \( HB^{0.1} \). The following correlations were suggested:
For squeezing conditions
For non-squeezing conditions
4.1.3 Dwivedi (2014) Approach Based on Q, N and Joint Factor
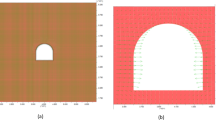
Recently Dwivedi (2014) collected data for more than 180 tunnel sections for the various ground conditions. Rock mass quality was obtained by computing Q (Barton et al. 1974), N (Goel et al. 1995) and joint factor J f (Arora 1987; Ramamurthy and Arora 1994; Singh 1997; Singh et al. 2002, 2004). The value of joint factor will vary along the periphery of the tunnel. For simplicity, the joint factor was obtained at springing level (element A, Fig. 9). Apparent dip of the joint as obtained in the plane normal to tunnel axis was considered to get the joint inclination parameter of the joints. The conditions for different ground conditions were expressed as given in Table 2.

Computation of joint factor: a rock mass element “A” near springing level. b Apparent dip of joints for element “A”
4.2 Semi-empirical Approaches
4.2.1 Rock Mass Strength-Based Approaches
The excavation of a tunnel redistributes the stresses in the tectonically stressed rock mass. The tangential stresses around the tunnel periphery may become large and in the absence of adequate support, may exceed the uniaxial compressive strength of the rock mass. The rock mass at the periphery may fail, and the broken zone may progress slowly in the radial direction, giving rise to time-dependent large-tunnel convergence. The rock-mass-strength-based approaches attempt to “quantify” squeezing potential by comparing the rock mass strength with the overburden stress at the tunnel depth.
Jethwa et al. (1984) defined an index “competency factor” as the ratio of uniaxial compressive strength of rock mass to overburden stress γH. The competency factor was used to define squeezing potential, and a classification for squeezing potential was suggested as shown in Table 3.
Hoek and Marinos (2000) also used the ratio of rock mass uniaxial compressive strength σ cm to the in situ stress p o to define tunnel squeezing potential. An approximate relationship was suggested based on axisymmetric finite element analysis to assess the tunnel strain for in situ stresses p o and support pressures p i as follows:
The squeezing level was classified as given in Table 4.
4.2.2 Strain-Based Approaches
4.2.2.1 Aydan et al. (1993) Approach
Rather than comparing the rock mass strength with the in situ stress, some investigators find it more convenient to compare the strains or deformations to quantify the squeezing potential. It is argued by Singh et al. (2007) that the approach of comparing the strain and not the strength is advantageous as the deformations are easy to measure in the field. The field engineer can easily observe deformations and modify the support system during the progress of the project. Aydan et al. (1993) have used analogy between the stress–strain response of rock in laboratory and the tangential stress–strain response around tunnels to define squeezing potential. Five distinct states of stress–strain response were expressed during loading of a specimen at low confining stress (Fig. 10). Expressions were suggested to obtain the normalised strain levels as follows:

Idealised strain levels used for defining squeezing levels (Aydan et al. 1993)
If the strain level around a circular tunnel in a hydrostatic stress field is \( \varepsilon_{\uptheta}^{\text{a}} \), and elastic strain limit for the rock mass is \( \varepsilon_{\uptheta}^{\text{e}} \), the ratio of \( \varepsilon_{\uptheta}^{\text{a}} \) to \( \varepsilon_{\uptheta}^{\text{e}} \) gives an indication of the squeezing potential in the tunnel. A classification of squeezing potential was suggested as shown in Table 5 (Aydan et al. 1993). The squeezing potential was divided into five classes.
4.2.2.2 Critical-Strain-Based Approach (Singh et al. 2007)
The critical strain is defined as an empirical level of tangential strain at the periphery of the tunnel above which construction problems are likely to occur. Sakurai (1997) used critical strain to define various warning levels for severity of construction in a tunnel. Aydan et al. (1993) and Hoek (2001) considered critical strain value equal to 1% as a thumb rule. It has, however, been observed that there are some tunnels which suffered strains as high as 4% but did not exhibit stability problems (Hoek 2001). Singh et al. (2007) suggested that the critical strain should not be taken as 1%, rather it should depend on the properties of the intact rock material and jointed rock mass. Based on laboratory experiments on large number of rock mass specimens, Singh et al. (2007) suggested the following relationship for computing critical strain, ε cr.
where E tj and E i are the tangent moduli of rock mass and intact rock, respectively.
To assess rock mass modulus E tj, one can use Q system and strength reduction factor. The following two alternative expressions were then obtained for critical strain.
and
To define squeezing potential, Singh et al. (2007) suggested that the observed or expected strain may be obtained either from numerical modelling or preferably from actual monitoring in the field. The squeezing index, SI, may then be obtained as follows:
A classification was suggested to quantify the squeezing potential (Table 6) which can be used to classify the squeezing potential based on the index SI. Based on the expected squeezing levels, the strategies may be formulated to face the construction problems.
5 Prediction of Tunnel Deformation
Deformations are major concern in case of tunnels excavated through weak rocks. If proper counter measures to install sufficient supports are not taken in time, excessive deformations may occur leading to instability problems. A prior knowledge of deformation level is therefore very essential to keep contingency plans ready in advance. An empirical approach to assess likely tunnel deformation that has been suggested recently is presented in the following section.
Dwivedi et al. (2013) have compiled a database of case histories from hydroelectric projects. Rock mass characteristics were defined either by Q or joint factor J f. Attempts were made to find correlations amongst the deformation u p, support stiffness K, in situ stress σ v (MPa), tunnel radius a and rock mass characteristics J f or Q for squeezing and non-squeezing ground conditions. The relationships so obtained are presented in Table 7.
6 Prediction of Support Pressure
The adequacy of the tunnel support system will depend on the ultimate support pressure and capacity of the support to resist that pressure. Various correlations are available in the literature to estimate the support pressure for squeezing and non-squeezing ground conditions.
Jethwa et al. (1984) used an analytical closed-form solution for a circular tunnel under a hydrostatic stress field and data from in situ monitoring and suggested expression for the ultimate rock pressure pu on the tunnel lining in terms of peak and residual friction angles of the rock mass as shown in Fig. 11. The rock mass was considered to be elastic–plastic ideally brittle model with a Mohr–Coulomb strength criterion with known values of shear strength parameters for peak and residual conditions.

Support pressure as per Jethwa et al. (1984) approach
Grimstad and Barton (1993) suggested an empirical approach for estimation of roof support pressure, P u, for squeezing and non-squeezing conditions in tunnels using rock mass quality, Q, as follows:
where P u is the tunnel support pressure, MPa; J n, the joint set number; J r, the joint roughness number; and Q, the rock quality index.
Goel (1994) has suggested a correlation for support pressure, P e, for non-squeezing ground based on rock mass number N as
Goel (1994), based on case histories of 63 tunnels, concluded that the effect of tunnel size and depth of overburden is less in non-squeezing conditions, but it is significant in squeezing conditions. The following empirical correlation was suggested for prediction of ultimate support pressure in squeezing ground conditions:
where P N = tunnel support pressure in MPa; f = correction factor for tunnel closure (Goel 1994); H = depth of tunnel (m); a = radius of tunnel (m); and N is rock mass number.
Bhasin and Grimstad (1996) took into consideration the size of the tunnel suggested the following correlation for poor quality brecciated rock mass.
where P b defines the ultimate tunnel support pressure, MPa; D is the diameter or span of the tunnel (m); J r is the joint roughness number; and Q is the rock quality index.
Recently Dwivedi (2014) analysed data of 35 tunnel sections from 10 different tunnelling projects for non-squeezing ground conditions. The following correlation has been suggested to estimate support pressure based on joint factor.
where P e = ultimate support pressure in non-squeezing ground, MPa; σ v = vertical in situ stress (0.027H), MPa; and d = radial tunnel deformation (%).
Dwivedi et al. (2014) analysed deformation data of several squeezing tunnels. Variation of deformation with joint factor was studied. The following correlation for predicting ultimate support pressure for squeezing ground condition was suggested:
where P s = predicted support pressure, MPa; σ v = vertical in situ stress (0.027H), MPa, σ ci = uniaxial compressive strength of intact rock, MPa; σ h = horizontal in situ stress, MPa; and d = radial tunnel deformation (%).
7 Concluding Remarks
Geotechnical issues are the most dominating aspects which cause delay and cost escalation in tunnelling projects, especially in weak rocks. The major issues are estimation of rock mass strength, suitable nonlinear failure criterion, assessment of squeezing potential, likely tunnel deformation and support pressure for various ground conditions. In the present chapter, a brief description has been given as to how reliable information can be generated based on simple characterisation of rock mass and classification techniques which are very easy to use in the field. A nonlinear strength criterion (MMC criterion) has been discussed. The criterion has the advantage in that the conventional parameters c and ϕ are retained as such. Correlations have been suggested to assess squeezing potential, tunnel deformation and support pressure based on rock mass quality Q, rock mass number N and joint factor J f.
The empirical correlations are based on certain assumptions about the shape of the tunnel and in situ stress state. It is recommended that if significant problems are foreseen, detailed rock mass–tunnel support interaction analysis (2D and 3D) should be carried out using computer software for the actual shape of tunnel and the in situ stress state to arrive at final solution. The geotechnical model should be constantly updated as additional information is gathered during progress of tunnel and modifications in the support system should be made accordingly.
References
Arora, V. K. (1987). Strength and deformational behaviour of jointed rocks (Ph.D. thesis). IIT Delhi, India.
Asef, M. R., Reddish, D. J., & Lloyd, P. W. (2000). Rock-support interaction analysis based on numerical modeling. Geotechnical and Geological Engineering, 18, 23–37.
Aydan, O., Akagi, T., & Kawamoto, T. (1993). The squeezing potential of rocks around tunnels: Theory and prediction. Rock Mechanics and Rock Engineering, 26(2), 125–143.
Aydan, O., & Dalgic, S. (1998). Prediction of deformation behavior of 3-lanes Bolu tunnels through squeezing rocks of North Anatolian Fault Zone (NAFZ). In Proceedings of Regional Symposium on Sedimentary Rock Engineering (pp. 228–233), Taipei.
Barla, G. (2001). Tunnelling under squeezing rock conditions. Tunnelling mechanics. In D. Kolymbas (Ed.), Eurosummer-school in tunnel mechanics, Innsbruck, 2001 (pp. 169–268). Berlin: Logos Verlag. Available at: http://ulisse.polito.it/matdid/1ing_civ_D3342_TO_0/Innsbruck2001.PDF.
Barton, N. (1976). Rock mechanics review: The shear strength of rock and rock joints. International Journal of Rock Mechanics and Mining Science and Geomechanics Abstracts, 13(9), 255–279.
Barton, N. (2002). Some new Q-value correlations to assist in site characteristics and tunnel design. International Journal of Rock Mechanics and Mining Sciences, 39, 185–216.
Barton, N., Lien, R., & Lunde, J. (1974). Engineering classification of rock masses for the design of tunnel support. Rock Mechanics, 6(4), 183–236.
Bhasin, R., & Grimstad, E. (1996). Use of stress-strength relationship in the assessment of tunnel stability. Tunnelling and Underground Space Technology, 11(1), 93–98.
Brown, E. T. (1970). Strength of models of rock with intermittent joints. Journal of Soil Mechanics & Foundations Div, Proceedings of the ASCE, 96(SM6), 1935–1949.
Deere, D. U., & Miller, R. P. (1966). Engineering classification and index properties for intact rock, Technical Report No. AFNL-TR-65-116. New Mexico: Air Force Weapons Laboratory.
Dwivedi R. D. (2014). Behaviour of underground excavations in squeezing ground conditions (Ph.D. thesis). IIT Roorkee, Roorkee, India.
Dwivedi, R. D., Singh, M., Viladkar, M. N., & Goel, R. K. (2013). Prediction of tunnel deformation in squeezing grounds. Engineering Geology, 161, 55–64.
Dwivedi, R. D., Singh, M., Viladkar, M. N., & Goel, R. K. (2014). Estimation of support pressure during tunnelling through squeezing grounds. Engineering Geology, 168, 9–22.
Goel R. K. (1994). Correlations for predicting support pressures and closures in tunnels (Ph.D. thesis). University of Nagpur, India, 310 p.
Goel, R. K., Jethwa, J. L., & Paithankar, A. G. (1995). Indian experiences with Q and RMR systems. Tunnelling and Underground Space Technology, 10(1), 97–109.
Grimstad, E., & Barton, N. (1993). Updating the Q-System for NMT. In Proceedings of the International Symposium on Sprayed Concrete—Modern Use of Wet Mix Sprayed Concrete for Underground Support (pp. 46–66). Fagernes, Oslo: Norwegian Concrete Association.
Hoek, E. (2001). Big tunnels in bad rock. ASCE Journal of Geotechnical and Geoenvironmental Engineering, 127(9), 726–740.
Hoek, E. (2007). Tunnels in weak rock. Practical Rock Engineering. https://www.rocscience.com/learning/hoek-s-corner/books.
Hoek, E., & Brown, E. T. (1980). Empirical strength criterion for rock masses. Journal of Geotechnical and Geoenvironmental Engineering Div, ASCE, 106(GT9), 1013–1035.
Hoek, E., & Brown, E. T. (1982). Underground excavations in rock. London: The Institution of Mining and Metallurgy, 527 p.
Hoek, E., & Marinos, P. (2000). Predicting tunnel squeezing problem in weak heterogeneous rock masses. Tunnels and Tunnelling International, 32(11), 45–51 & 32(12), 34–36.
IS:7317. (1974). Code of practice for uniaxial jacking test for modulus of deformation of rocks. Manak Bhawan, New Delhi: Bureau of Indian Standard.
Jethwa, J. L., Singh, B., & Singh, B. (1984). Estimation of ultimate rock pressure for tunnellinings under squeezing rock conditions—A new approach. In E. T. Brown & J. A. Hudson (Eds.), Design and Performance of Underground Excavations, ISRM Symposium (pp. 231–238), Cambridge.
Kalamaras, G. S., & Bieniawski, Z. T. (1993). A rock mass strength concept for coal seams. In: Proceedings of 12th Conference Ground Control in Mining (pp. 274–283). Morgantown.
Mehrotra V. K. (1992). Estimation of engineering parameters of rock mass (Ph.D. thesis). University of Roorkee, Roorkee, India.
Obert, L., & Duvall, W. I. (1967). Rock mechanics and the design of structures in rock. USA: John Wiley & Sons Inc.
Ramamurthy, T. (1986). Stability of rock mass, 8th I.G.S. annual lecture. Indian Geotechnical Journal, 16(1), 1–75.
Ramamurthy, T. (1993). Strength and modulus response of anisotropic rocks. In: Comprehensive rock engineering (Vol. 1, pp. 313–329), UK: Pergamon Press.
Ramamurthy, T., & Arora, V. K. (1994). Strength prediction for jointed rocks in confined and unconfined states. International Journal of Rock Mechanics and Mining Sciences & Geomechanics Abstracts, 31(1), 9–22.
Ramamurthy, T., Rao, G. V., & Rao, K. S. (1985). A strength criterion for rocks. In Proceedings of the Indian Geotechnical Conference (Vol. 1, pp. 59–64), Roorkee.
Sakurai, S. (1997). Lessons learned from field measurements in tunneling. Tunnelling and Underground Space Technology, 12(4), 453–460.
Shen, J., Jimenez, R., Karakus, M., & Xu, C. (2014). A simplified failure criterion for intact rocks based on rock type and uniaxial compressive strength. Rock Mechanics and Rock Engineering, 47(2), 357–369.
Sheorey, P. R. (1997). Empirical rock failure criteria. Rotterdam: Balkema.
Singh, B., Jethwa, J. L., Dube, A. K., & Singh, B. (1992). Correlation between observed support pressure and rock mass quality. Tunnelling and Underground Space Technology, 7(1), 59–74.
Singh, M. (1997). Engineering behaviour of jointed model materials (Ph.D. thesis). IIT Delhi, India.
Singh, M. (2016). Use of critical state concept in determination of triaxial and polyaxial strength of intact, jointed and anisotropic rocks. In X.-T. Feng (Ed.), Rock mechanics and engineering (Vol. 1, pp. 479–502, Chapter-17), USA: CRC Press.
Singh, M., Raj, A., & Singh, B. (2011). Modified Mohr-Coulomb criterion for non-linear triaxial and polyaxial strength of intact rocks. International Journal of Rock Mechanics and Mining Sciences, 48(4), 546–555.
Singh, M., & Rao, K. S. (2005a). Bearing capacity of shallow foundations in anisotropic non Hoek-Brown rock masses. ASCE Journal of Geotechnical and Geo-environmental Engineering, 131(8), 1014–1023.
Singh, M., & Rao, K. S. (2005b). Empirical methods to estimate the strength of jointed rock masses. Engineering Geology, 77(1–2), 127–137.
Singh, M., Rao, K. S., & Ramamurthy, T. (2002). Strength and deformational behaviour of jointed rock mass. Rock Mechanics and Rock Engineering, 35(1), 45–64.
Singh, M., Rao, K. S., & Ramamurthy, T. (2004). Engineering behaviour of jointed rock mass. Indian Geotechnical Journal, 34(2), 164–198.
Singh, M., Samadhiya, N. K., Kumar, A., Kumar, V., & Singh, B. (2015). A nonlinear criterion for triaxial strength of inherently anisotropic rocks. Rock Mechanics and Rock Engineering, 48(4), 1387–1405.
Singh, M., & Singh, B. (2005). A strength criterion based on critical state mechanics for intact rocks. Rock Mechanics and Rock Engineering, 38(3), 243–248.
Singh, M., & Singh, B. (2012). Modified Mohr-Coulomb criterion for non-linear triaxial and polyaxial strength of jointed rocks. International Journal of Rock Mechanics and Mining Sciences, 51, 43–52.
Singh, M., Singh, B., & Choudhari, J. (2007). Critical strain and squeezing of rock mass in tunnels. Tunnelling and Underground Space Technology, 22(3), 343–350.
Srivastava, L. P., & Singh, M. (2015). Effect of fully grouted passive bolts on joint shear strength parameters in a blocky mass. Rock Mechanics and Rock Engineering, 48(3), 1197–1206.
Trueman, R. (1988). An evaluation of strata support techniques in dual life gateroads (Ph.D. thesis). University of Wales, Cardiff.
Yudhbir, W. L., & Prinzl, F. (1983). An empirical failure criterion for rock masses. In Proceedings of 5th International Congress on Rock Mechanics (Vol. 1, pp. B1–B8). Melbourne.
Zhang, L. (2010). Estimating the strength of jointed rock masses. Rock Mechanics and Rock Engineering, 44, 391–402.
Acknowledgements
This author would like to put on record his sincere thanks to his teachers Prof. T. Ramamurthy, Prof. K.S. Rao and Prof. K.G. Sharma, all from IIT Delhi and his mentor Prof. Bhawani Singh from University of Roorkee for their contributions in explaining basics of Rock Engineering to the author. Thanks are also due to Prof. M.N. Viladkar and Prof. N.K. Samadhiya, both from IIT Roorkee for helping in understanding the geotechnique of tunnel engineering. The Ph.D. students namely Dr. B.K. Agrawal, Dr. Ajit Kumar, Dr. Jaysing Choudhari, Dr. Ajay Bindlish, Dr. R.D. Dwivedi, Dr. Harsh Verma, Dr. L.P. Srivastava and Dr. Dharmendra Shukla have immensely contributed on the subject matter through their Ph.D. work. The author sincerely thanks them all.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Singh, M. (2018). Geotechnical Challenges in Tunnelling Through Weak Rocks. In: Krishna, A., Dey, A., Sreedeep, S. (eds) Geotechnics for Natural and Engineered Sustainable Technologies. Developments in Geotechnical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-10-7721-0_9
Download citation
DOI: https://doi.org/10.1007/978-981-10-7721-0_9
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7720-3
Online ISBN: 978-981-10-7721-0
eBook Packages: EngineeringEngineering (R0)