
Abstract
Fractional-order controllers (FOC) can be more adequate to control systems with complex dynamics than integer-order controllers; however, how to obtain FOC is still being explored vigorously. This paper deals with a tuning approach for FOC with primary requirements of simplicity in technique and robustness. A simple analytical method to tune fractional-order proportional-integral (FOPI) controller for known system transfer functions is proposed. Study shows the simplicity and efficiency of the presented design method over some previously published approaches.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
There are many techniques for PID tuning, classical rules, optimization programs, model-based tuning, and many other tested in industry so far [1]. Even though the PID is simple, many challenge to tune the controller parameters practically. Recently, real-order PID controller design shows considerable interest in academic research and industry [2,3,4,5,6,7,8]. This is mainly due to the fact that real-order transfer for controller can better represent the various systems of engineering and sciences [1]. In general, real-order transfer function considered for PID is called the fractional-order PID (FOPID) controller. Moreover, it is evident from significant research that FOC have additional merits of handling complex system dynamics compared to conventional PID. After inducing the concept of FOPID controller in [1], a stabilization problem of fractional systems using FOPID controllers was also studied by Hamamci [9]. Especially, due to the computational tool such as FOMCON toolbox [10] available, design verification of real-order transfer function is possible in Simulink study. Literature study shows that number of design approaches have been reported to suggest good FOPID parameter values. Some methods were applied successfully in many practical non-integer examples such as control of hard disk drive servo systems, control of power electronic converters, velocity control of a servo system, control of composite hydraulic cylinders, and control of head flow. All previous techniques experience certain limitations, such as to solve simultaneously two or more nonlinear algebraic relations to calculate the unknown parameters of FOPID. However, in this way, there is a possibility to place the non-optimum solution if pitiable guess of initial values is used.
In this work, an effort is made to develop explicit tuning method for FOPI controller considering the real-order dead time systems. In this way, the proposed method can be applied to integer and fractional systems also. The objective is to derive simple and fast tuning formula that industry can adopt easily for various PID tune-controlled systems. The main objective is to design parameters of FOPI such that it optimizes load disturbance rejection. The exact formula is derived with required constraint imposed on the Nyquist curve. The loop transfer function of closed-loop must, therefore, satisfy robustness index.
2 A Real-Order (Fractional) Transfer Function
A general transfer function of any real order can be written in the s-domain as follows,
where \(a_{i} \in N\) for \(i = 0, \ldots ,n\), \(b_{j} \in N\) for \(j = 0, \ldots ,m\), \(\alpha_{k} \in R_{ + }\) for \(k = 0, \ldots ,n\), \(\beta_{l} \in R_{ + }\) for \(l = 0, \ldots ,m\) and \(\theta\) represents the constant time delay. Due to the real number order, the transfer function is also called “fractional-order.” It includes, in particular, traditional integer-order time delay systems.
3 FOPI Controller
It is well-known that PI controller is most simple and widely tested relatively in industry [1, 11]. There are many refined control techniques such as model predictive control and Smith predictor and are developed on PI. In this paper, the FOPI is considered as fractional-order controller and can be represented as C(s) to show the proposed controller synthesis effectively.
where \(K_{p}\), \(K_{i}\) and \(\lambda\) are the positive real tuning parameters. The real number \(\lambda\) represents the fractional-order.
3.1 Design and Tuning
Any control design wants to realize decent load disturbance rejection and also to robust from parameter variations. We desire to have tuning rules of controller be simple and still result in good closed-loop behavior. Based on robustness specifications, such as gain margin, phase margin, and maximum sensitivity, many classical PI/PID tuning methods were developed and also quite well adopted in the practice [1]. Generally it is possible to change the system characteristics of \(G\left( {j\omega } \right)_{s = j\omega }\) in (1) such that the overall closed-loop system performs fine. How can we say the system’s performance is up to the satisfaction? When the effect of load disturbances will be less and it must be stable always whenever moderate changes in system parameters. In general, it is desired to choose C(s) tuning parameters so the system under controlled is not disturbed with variations in system dynamics. A study tells that this requirement can be obtained via sensitivity specification. A sensitivity problem for same purpose was discussed in [11]. According to defined specification for sensitivity, the system remains stable to variations in system dynamics if the robustness is specified by:
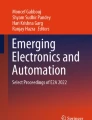
where, \(G_{L} (s) = G(s)C(s)\). Figure 1 shows the geometrical illustration of the above specification. A range of M r gives the constraint of the distance between the imaginary axis and the Nyquist curve of G L (jω), and it is measured from the left-half of the complex plane. Moreover, a specification in (3) turns out to be sufficient condition for designing a controller.

Geometrical illustration of Eq. (3)
By analyzing the loop transfer function in complex frequency domain and substituting \(s = j\omega\) and \(j^{\lambda } = {\text{e}}^{{j\frac{\lambda \pi }{2}}} = \left( {{ \cos }\frac{\lambda \pi }{2} + j \sin \frac{\lambda \pi }{2}} \right),\quad G_{L} (j\omega ) = G(j\omega )C(j\omega )\), equation becomes
where, \(A(\omega ) = \text{Re} [G(j\omega )] \,\) and \(B(\omega ) = \text{Im} [G\left( {j\omega } \right)]\).
Let’s define,
In this design, the criteria is imposed to have a line parallel to the imaginary axis along with the Nyquist curve of \(G_{L} (j\omega )\) (see Fig. 1) and a distance between them must be constant say, \(1/M_{r}\) and also halts on the left-half of the s-plane. To accomplish this constraint, following two expressions are obtained,
By substituting (5) into above equations, respectively, we get
Here, \(\partial A/\partial \omega\) and \(\partial B/\partial \omega\) are denoted by \(A^{{\prime }} (\omega )\) and \(B^{{\prime }} (\omega )\) in the rest of the paper. Now, for given ω and λ, both K p and K i can be estimated from two expressions (8) and (9). Hence, the complete region of the parameters can also be generated for \(0 < \omega < \infty\) and \(0 < \lambda < 2\). Obviously, any arbitrary set (K p, K i, λ) will satisfy the condition in (6) and also follows the relation
By stating that each set is not unique to a given value of M r . The task is remained to find the optimal set (K p , K i , λ) while it satisfies the M r constraint. In addition, the value of M r can be set up as suitable trade-offs between performance and robustness in any given dynamic models.
In order to estimate the optimal set of (K p , K i , λ) and given M r , we need to know the optimal point of frequency ω. For this, the well-known integrated error criterion can be used, defined by
Here, the unit step input gives the error e(t). In [1], it shows that the value of IE is directly related to the controller parameters, i.e., IE = 1/K i . Thus, the controller parameters can be calculated by maximizing K i (to reduce the error quickly) subject to requirements (6) and (7). So, the expressions (8) and (9) define subtly K i as a function of K p and λ. One can write the derivative function to find maximum of this function as
It is obvious that K i is maximum to have the condition satisfies dK i = 0. Same way for K p , one can formulate the relationship as
It means that \(f\) is a maximum at particular frequency when the real part of system transfer function is zero. We define this frequency point as the local extremum point, \(\omega = \omega_{90}\). Substituting (14) into (8)–(10), we obtain the following three expressions,
Two expressions (15) and (16) are explicit formulas. Additionally, it is desirable to relate third controller parameter λ in terms of measured system frequency ω 90. The aim is to derive an explicit formula to tuning rule. By analyzing the Eq. (17) for various values of λ, \(\lambda \in (0,2)\), following interpolating equation fits the data well
The above expression calculates tuning parameter λ. Practically, ω 90 is obtained from the Nyquist plot of the frequency response of G(jω), i.e., \(\left. {G(j\omega )} \right|_{{\omega = \omega_{90} }} = - jB(\omega_{90} )\), as shown in Fig. 2.

Measured \(\omega_{90}\) of \(G(j\omega )\) from Nyquist plot
3.2 Choice of \(M_{r}\)
The choice of M r provides us desirable property of closed-loop system to be insensitive with parameter variations. The controller parameters will vary depending on the changes of M r , but the system will always remain stable. To understand this point further, let us take the fractional-order system with transfer function,
For this transfer function, \(\omega_{90}\) is calculated as 1.1624 from the frequency response of \(G_{1} (j\omega )\). Tuning rule is evaluated for robustness range, 1.4 < M r < 3.2 for G 1, and responses are shown in Figs. 3 and 4. It was observed that responses obtained with M r ≥ 2.0 proved little or no overshoot, whereas output with \(M_{r} = 1.5\) observed oscillatory with a larger overshoot but faster. This indicates that \(M_{r}\) value can be useful to tune parameter values. Note that \(M_{r}\) value is also to be decided based on the stability margin. A large value of \(M_{r}\) indicates that the stability margin of the control system is high. Obviously, it is desirable in system control at the time to design any controller values.

Outputs for G 1 with various M r

Control inputs for G 1
4 Example
A higher order FO system proposed by Bettayeba and Mansouric [7] and Das et al.’s [8] has the transfer function
The fractional-order controller obtained by Bettayeba and Mansouric [7] was
For the same transfer function model, Das et al.’s [8] method gave the FOPID controller as
Letting tuning parameter \(M_{r} = 2.5\), the FOPI controller designed by the proposed method is
for the system frequency \(\omega_{90} = 1.7191\). For comparison with other methods, responses to a unity setpoint change and disturbance of +0.2 at t = 20 s are given in Figs. 5 and 6, respectively. It is observed that G 2 controlled by the proposed controller could obtain smaller control effort with small overshoot and settling time. The total variation in control input was measured as 2.12 for [8] and 2.21 for [7]; while that for the proposed method was measured only 1.87. The merit of the proposed method is visible since it gives the desired properties with less control input effort. Moreover, the percentage overshoot was measured 2.82 and 5.89 for [7] and [8], respectively.


5 Conclusion
This paper presents a general FOPI design method for any order transfer function with various dynamics, including with and without time delays, low and high real orders. The method uses the integrated error criterion with a desired robustness specification and solves for the FOPI controller parameters in the frequency domain. Explicit tuning rules succeed for various real-order systems with a single robustness parameter to be selected by the user. This investigation helps to explore online automatic tuning procedure for fractional controller which is very attractive in a practical point of view.
References
Åström, K.J., Hägglund, T.: Advanced PID control. ISA-Research Triangle Park, NC 27709 (2006)
Podlubny, I.: Fractional-order systems and PIλDµ controllers. IEEE Trans. Auto Control 44(1), 208–214 (1999)
Monje, C.A., Vinagre, B.M., Feliu, V., Chen, Y.: Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 16(7), 798–812 (2008)
Chen, Y.Q., Petras, I., Xue, D.: Fractional order control—a tutorial. In: American Control Conference (ACC’09), June 2009, pp. 1397–1411
Das, S., Saha, S., Das, S., Gupta, A.: On the selection of tuning methodology of FOPID controllers for the control of higher processes. ISA Trans. 50(3), 376–388 (2011)
Merrikh-Bayat, F.: General rules for optimal tuning the PIλDµ controllers with application to first-order plus time delay processes. Can. J. Chem. Eng. 90(6), 1400–1410 (2012)
Bettayeba, B., Mansouric, R.: Fractional IMC-PID-filter controllers design for non-integer order systems. J. Proc. Control 24, 261–271 (2014)
Das, S., Pan, I., Das, S.: Multi-objective LQR with optimum weight selection to design FOPID controllers for delayed fractional order processes. ISA Trans. 58, 35–49 (2015)
Hamamci, S.: An algorithm for stabilization of fractional-order time delay systems using fractional-order PID controllers. IEEE Trans. Auto. Control 52(10), 1964–1969 (2007)
Tepljakov, A., Petlenkov, E., Belikov, J.: FOMCON a MATLAB toolbox for fractional-order system identification and control. Int. J. Microelectron. Comput. Sci. 2(2), 51–62 (2011)
Wang, Y.G., Shao, H.H.: Optimal tuning for PI controller. Automatica 36(1), 147–152 (2000)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Mehta, U., Lechappe, V., Singh, O.P. (2018). Simple FOPI Tuning Method for Real-Order Time Delay Systems. In: Konkani, A., Bera, R., Paul, S. (eds) Advances in Systems, Control and Automation. Lecture Notes in Electrical Engineering, vol 442. Springer, Singapore. https://doi.org/10.1007/978-981-10-4762-6_44
Download citation
DOI: https://doi.org/10.1007/978-981-10-4762-6_44
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-4761-9
Online ISBN: 978-981-10-4762-6
eBook Packages: EngineeringEngineering (R0)