
Abstract
We developed a passive haptic technique, using the brake of a DC motor, to create a greater perception of impulse force. We found that when using the brake of a DC motor, delivering two short pulses immediately prior to the main brake significantly increases the operator’s perception of impulse force. This finding was verified during our empirical assessment. In the experiment, all five participants reported that a damping brake with pulsive resistances delivered a larger resistance than that caused by a brake without pulsive changes. Our technique is applicable to passive haptic interfaces, which are inherently safe and energy-efficient.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Passive haptic interfaces, which are inherently safe and energy-conservative, are beneficial for applications that may be used by a number of unspecified users. Thus far, passive haptic interfaces have been investigated by many research groups [1,2,3,4]. In contrast to previous studies, the purpose of this study is to induce a large perception of impulsive resistance based on the principles of the passive damping brake of a DC motor and human perception. A large impact is delivered by a large and rapid change of force. Therefore, a physically maximum resistance force is realized by continuously exerting the damping brake force. On the other hand, we focused on the pulsive brake generated by quickly switching the damping brake applied prior to the continuous brake on and off. Our findings revealed that presenting two short pulsive brakes before the continuous brake induces a greater perceived resistance force.
2 Principle
2.1 Damping Brake of DC Motor
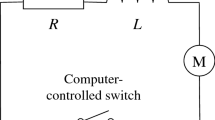
We adopted the damping brake of a DC motor to function as the passive element of our haptic interface. This damping brake is generated by the back electromotive force of a short-circuited DC motor. Figure 1 shows a schematic of a computer-controlled short circuit in which R and L are the resistance and inductance of the circuit, respectively. When the DC motor rotates at an angular velocity of \(\omega (t)\), on the basis of Kirchhoff’s law, the brake torque \(\tau (t)\) is determined as follows:
where K is the torque constant of the motor. Provided that the inductance L is negligibly small, the brake torque, \(\tau (t)\), is proportional to the square of K and the angular velocity, \(\omega (t)\). In this scenario, the brake torque is controlled using a switch in the circuit, as shown in Fig. 1.

Short circuit to control the damping brake of a DC motor
2.2 Impulsive Resistance Force
One way to illustrate the concept of impulsive resistance force is to consider the physical act of collision. Figure 2 shows the image of a hand, formed into a fist, colliding with an object. The maximum impulse force occurs at the point of contact between the hand and the object. In the same way, an analogous impact can be achieved by the application of a large and rapid brake. The damping brake of the DC motor achieves the most rapid increase of brake torque by continuously applying the maximum brake force. The brake that expresses the largest impulsive resistance is the stepwise brake (see Fig. 2). This brake is realized by switching the short circuit of the DC motor on at the moment of impact. We aimed to increase the operators perception of braking force above and beyond what was possible by the brake with stepwise brake control.

Impulsive resistance force. Left Example of an impulsive resistance caused by a collision between a hand and an object. Right Stepwise passive brake which produces the physically largest impulsive force

Passive haptic interface on the basis of the damping brake of the DC motor
3 Passive Haptic Interface Based on the Damping Brake of a DC Motor
We designed a passive haptic interface that delivers impulsive resistance forces by using the damping brake of a DC motor as shown in Fig. 3 [5]. The output shaft of the motor (RE-40, Maxon motor, reduction ratio: 12) was connected to a 12 mm long aluminum crank (see Figs. 3 and 5). Participants maneuvered the interface by using the crank. A rotary encoder (Encoder MR Type L, Maxon motor, resultant resolution: 1024 ppr) was installed on the DC motor. A switch of the short circuit was controlled by a microcomputer that operated at 10 kHz. While the switch was on, this device passively presented brake torque to a participant rotating the crank on the above-mentioned principle. A strain-gauge-typed force sensor (USL06-H5, Tec Gihan) without low-pass-filter circuits was used to measure the force at the handle of the crank.
4 Experiment
An experiment was conducted to investigate whether brakes preceded by one or two quick pulses resulted in a larger perceived resistance than that delivered by the stepwise brake. The experimental protocols, including the recruitment procedure of the participants, were approved by the internal review board of the Engineering School, Nagoya University (#15-12).
4.1 Impulsive Resistance Stimuli
We compared three types of brakes that delivered impulsive resistance forces. The three types of braking forces were stepwise, one-pulse, and two-pulse stimuli. Figure 4 shows the temporal operation for each type of brake stimulus. The durations of stimuli were unified to be 100 ms, such that the duration did not influence the perceived strength of the brake. The stepwise brake was a continuous brake lasting for 100 ms. As previously mentioned, this brake produced a larger impulsive resistance force than the other types of brake stimuli. The other two stimuli involved one or two short pulses prior to the main brake, which were caused by rapidly controlling the short-circuit. The one-pulse stimulus produced a 5 ms pulse with a 5 ms interval preceding the 90 ms main brake. The two-pulse stimulus had two pulses, each lasting 3 ms with an interval of 3 ms, before the main brake of 88 ms. These pulses were satisfactorily short for the stimuli to be perceived as an impact caused by a collision with an object. We expected that these pulse stimuli would evoke greater sense of impact resistance than that caused by the stepwise brake.

Three types of braking stimuli. Left Control of the brake torque. Right Examples of braking forces and angular velocities of the motor. The impulsive resistance stimuli were initiated at \(t = 0\) while the participant moved the crank connected to the DC motor
4.2 Procedure
Five volunteer students, who were unaware of the objectives of the research, participated in the experiment. During the experiment, the sounds generated by the impact stimulus were muffled by pink noise played through headphones.
In the experiment, the participants were instructed to rank the three types of stimuli on the basis of the strength of the perceived resistance in a forced-choice manner without any duplicated rank on more than two different stimuli. Each of the three types of braking forces was presented when the crank came at an angle of \(\pi \)/2 rad, as shown in Fig. 5. During the experiment, the participants could freely switch the three types of stimuli by using a keyboard. They were allowed to experience the stimuli repeatedly as many times as they desired by moving the crank back and forth between around 0 rad and \(\pi \)/2 rad. They were also allowed to rotate the crank at whatever speed was comfortable.

Experience of impulsive resistance stimuli
4.3 Results and Discussion
All the five participants ranked the two-pulse stimulus first. As the second largest stimulus, the one-pulse and stepwise stimuli were selected by two and three participants, respectively. The ranks of the three types of stimuli differed significantly (\(p < 0.05\), Friedman test). Subsequently, we conducted pair-wise comparisons by using Wilcoxon’s rank sum tests. The ranks for the two-pulse stimulus were significantly different from those of the one-pulse and stepwise stimuli at \(p < 0.05\). The two-pulse stimulus produced a larger perceived resistance than the other two types of stimuli. It is interesting that the two pulses preceding the main brake yielded a greater perceived impulsive resistance in spite of the loss of force outputs. This fact implies that the perception of impulsive resistance is not in full agreement with the physical consideration.
5 Conclusion
This study proposed a method for presenting a large impulsive resistance by using a passive haptic interface based on the damping brake of a DC motor. We compared three types of braking stimuli in the experiment. One was a stepwise brake that realized a physically maximum impulsive resistance. Another was a one-pulse stimulus involving a short pulse preceding the main brake. The other one was a two-pulse stimulus that included two pulses before the main brake. All the five participants reported that the two-pulse stimulus delivered the largest resistance. Our method will be easily applicable to many passive haptic interfaces that are inherently safe, and our findings about the human perception of impulsive resistance will improve their abilities.
References
Koyama, T., Yamano, I., Takemura, K., Maeno, T.: Multi-fingered exoskeleton haptic device using passive force feedback for dexterous teleoperation. In: Proceedings of IEEE/RSJ International Conference of Intelligent Robotics and Systems, pp. 2229–2234 (2002)
Nakamura, T., Yamamoto, A.: A multi-user surface visuo-haptic display using electrostatic friction modulation and capacitive-type position sensing. IEEE Trans. Haptics pp. 1–12 (2016)
Radulescu, A., Howard, M., Braun, D.J., Vijayakumar, S.: Exploiting variable physical damping in rapid movement tasks. In: Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 141–148 (2012)
Srikanth, M., Vasudevan, H., Muniyandi, M.: DC motor damping: a strategy to increase passive stiffness of haptic devices. In: Ferre, M. (ed.) Haptics: Perception, Devices and Scenarios, vol. 5024 LNCS, pp. 53–62. Springer (2008)
Okada, T., Okamoto, S., Yamada, Y.: Impulsive resistance force generated using pulsive damping brake of DC motor. In: IEEE International Conference on Systems, Man, pp. 2359–2363. Cybernetics (2016)
Acknowledgements
This study was in part supported by ImPACT (Tough Robotics Challenge) and JSPS Kakenhi (15H05923).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Okada, T., Okamoto, S., Yamada, Y. (2018). Passive Haptics: Pulsive Damping Brake for Greater Impulse Perception. In: Hasegawa, S., Konyo, M., Kyung, KU., Nojima, T., Kajimoto, H. (eds) Haptic Interaction. AsiaHaptics 2016. Lecture Notes in Electrical Engineering, vol 432. Springer, Singapore. https://doi.org/10.1007/978-981-10-4157-0_37
Download citation
DOI: https://doi.org/10.1007/978-981-10-4157-0_37
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-4156-3
Online ISBN: 978-981-10-4157-0
eBook Packages: EngineeringEngineering (R0)