
Abstract
A novel sEMG ( surface electromyography) sensor using polypyrrole-coated nonwoven fabric sheet as electrodes (PPy-electrode) is proposed for the disabled to control prosthetic limbs in daily life. The PPy-electrodes are sewed on an elastic band to guarantee closely contact to the skin thus to enable stable sEMG measurement with high signal-to-noise ratio. Furthermore, the sensor is highly customizable to fit for the size and the shape of the stump so that the disabled can wear the sensor by themselves. The performance of the proposed sensor is investigated by comparing with Ag/AgCl electrodes with electrolytic gel in an experiment to measure the sEMG from the same muscle fibers. The high correlation coefficient (0.87) between the sEMG measured by the two types of sensors suggests the effectiveness of the proposed sensor. The experiment to control myoelectric prosthetic hands showed that the disabled can use it with one hand to obtain sEMG signals for myoelectric control.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Benefitting from the advance of robotics and biomedical engineering, the research on EMG prosthetic hands has developed quickly in recent years to meet the demands of those who have lost their hands. Many dexterous prosthetic hands, such as the iLimb hand and the iLimb Pulse by Touch Bionics, the Bebionic hand by RSL Steeper, and the Bebionic hand v2 by RSL Steeper (Belter et al. 2013), have been developed and commercially available. Surface electromyography (sEMG) has been widely studied for the control of prosthetic limbs since motion intentions can be identified based on the sEMG associated with the residual muscle contraction. Although many advanced algorithms are proposed to analyze sEMG signals, few of them are practical since they are based on the high-quality signals measured in labs which are not available for a disabled person in his/her daily life.
We have developed prosthetic hands with interactive wire-driven mechanism (Seki et al. 2013). An fMRI study with amputees has shown the adaptation process in the brain for control of the prosthetic hand (Kato et al. 2009). The prosthetic hand is controlled by sEMG signals with an online learning algorithm (Kato et al. 2006). However, for daily use of the prosthetic hand by a disabled person, the number of recognizable sEMG patterns is limited by the usability and stability of the sEMG electrodes . This study, therefore, introduces a sEMG sensor that can be worn one-handed for stable measurement of sEMG signals.
2 Methods
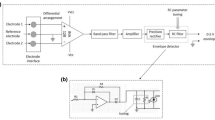
The sEMG sensor is an electrochemical transducer that detects biopotentials by using electrodes placed on the skin. Ag/AgCl electrodes, so-called wet electrodes utilizing an electrolytic gel to form a conductive path between skin and electrode, are currently most widely used in hospitals or laboratories. Despite the low electrode–skin impedance of Ag/Agcl electrodes contributes to a high S/N ratio, dry electrodes made from metals are always adopted in human robot interface since Ag/AgCl electrodes are disposable and not suited for long-term measurement. An important factor when using dry electrodes is their ability to maintain electrical contact with the skin since the electrical contact affects the electrode–skin impedance. Additionally, the end shape of the residual arm is different individually; it is hard for the existing metallic electrodes to maintain good electrical contact.
We therefore attempted to develop novel dry electrodes with soft conductive materials.
3 Results
The PPy-electrode sensor band and two disabled sEMG (surface electromyography ) Engineering Surface electromyography sensor using polypyrrole-coated nonwoven fabric sheet (Japan Vilene Company, Ltd) as electrodes (PPy-electrode) is proposed for the disabled to control prosthetic limbs in daily life. Compared with other conductive polymer which has been studied as bioelectrical sensors (Tsukada et al. 2012), polypyrrole is more stable in the environment of daily life.
As shown in Fig. 1, the PPy-electrodes are sewed on an elastic band to guarantee closely contact to the skin thus to enable stable sEMG measurement with high signal-to-noise ratio. Furthermore, the sensor is highly customizable to fit for the size and the shape of the stump so that the disabled can wear the sensor by themselves.

Polypyrrole-coated nonwoven fabric sheet (left) and the PPy-electrodes sewed on the elastic webbing band (right)
4 Results and Discussions
Figure 2 shows a 3-channel sEMG sensor band with six recording electrodes for differential amplification and a common ground electrode. The sensor band was manufactured for a 14-year-old girl with congenital right upper limb deficiency. The subject wearing the bands customized for her is shown in the right of Fig. 2. She was able to wear the sensor band one-handed by herself to get sEMG signals to control a two degree of freedom prosthetic hands developed by a previous study (Jiang, et al. 2014). With the myoelectric prosthetic hand, she tried to do some daily task, for example, moving a cup by holding the handle (Fig. 2). The experimental protocol was approved by the ethics board of The University of Electro-Communications.

PPy-electrode sEMG sensor band (left) and two subjects wearing sensor bands customized for them (middle and right)
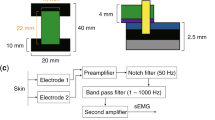
To investigate the quality of the signals measured by the proposed sensor, simultaneous measurement of sEMG from the same muscle fibers with the PPy-electrodes that we developed and the conventional wet electrodes (Ag/AgCl electrodes with electrolytic gel), which are widely used in hospitals and laboratories, was carried out. The measurement settings and the results are shown in Fig. 3. The raw sEMG signals measured by the two types of electrodes and the root mean square (RMS) of the signals were nearly the same. The high correlation coefficient (mean = 0.87, SD = 0.065, n = 12) between the RMS values of them suggest the effectiveness of the proposed PPy-electrode sEMG sensor.

Simultaneous measurement with wet electrodes and PPy-electrodes. Electrodes were placed along the same muscle fibers (left) and the sEMG signals measured were nearly the same (right)
Surveys (Vasluian et al. 2013; Biddiss and Chau 2007) have suggested that appearance, function, comfort, control, and durability are the main factors affecting prosthesis acceptance and rejection. In order to provide the technology and opportunities necessary for the disabled to maximize their quality of life using prosthetic hands, the whole system, including the prosthetic robotic hand, the mount parts, and the sEMG measurement and analysis units, should be convenient to be used by the persons most of whom have only one hand.
In this study, a novel PPy-electrode is developed to enable highly usable and effective sEMG measurement in real-life settings. It is wearable with one hand, and the size and shape of the electrodes can be easily tailored to fit with the residual arms, guaranteeing the electrical contact with the skin. Multiple channel measurement of sEMG can be accomplished more conveniently by arranging the electrodes on a base cloth, which provides more options of sEMG measurement.
References
Belter JT, Segi JL, Dollar AM et al (2013) Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. J Rehabil Res Dev 50(5):599–618. doi:10.1109/PAHCE.2014.6849617
Biddiss EA, Chau TT (2007) Upper limb prosthesis use and abandonment: a survey of the last 25 years. Prosthet Orthot Int 31(3):236–257. doi:10.1080/03093640600994581
Jiang YL, Sakoda S, Hoshigawa S et al (2014) Development and evaluation of simplified EMG prosthetic hands. In: 2014 IEEE international conference on robitics and biomimetics, pp 1368–1383. doi:10.1109/ROBIO. 2014.7090524
Kato R, Yokoi H, Arai T et al (2006) Real-time learning method for adaptable motion-discrimination using surface EMG signal. In: IEEE/RSJ international conference on intelligent robots and systems, pp 2127–2132. doi:10.1109/IROS.2006.282492
Kato R, Yokoi H, Arieta AH et al (2009) Mutual adaptation among man and machine by using f-MRI analysis. Robot Auton Syst 57(2):161–166. doi:10.1016/j.robot.2008.07.005
Seki T, Nakamura T, Kato T, Morishita S et al (2013) Development of five-finger multi-DoF myoelectric hands with a power allocation mechanism. In: 2013 IEEE international conference on robotics and automation, pp 2054–2059. doi:10.1109/ICRA.2013.6630852
Tsukada S, Nakashima H, Torimitsu K (2012) Conductive polymer combined silk fiber bundle for bioelectrical signal recording. PLoS ONE 7(4):e33689. doi:10.1371/journal.pone.0033689
Vasluian E, de Jong IGM, Janssen WGM et al (2013) Opinions of youngsters with congenital below-elbow deficiency, and those of their parents and professionals concerning prosthetic use and rehabilitation treatment. PLoS ONE 8(6):e67101
Acknowledgments
Project supported by JSPS KAKENHI Grant Number 25249025, “Brain Machine Interface Development” from Japan Agency for Medical Research and Development (AMED), and the Adaptable and Seamless Technology Transfer Program through Target-driven R&D JST(AS2524107P).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Zhejiang University Press and Springer Science+Business Media Singapore
About this paper
Cite this paper
Jiang, Yl., Sakoda, S., Togane, M., Morishita, S., Yokoi, H. (2017). One-Handed Wearable sEMG Sensor for Myoelectric Control of Prosthetic Hands. In: Yang, C., Virk, G., Yang, H. (eds) Wearable Sensors and Robots. Lecture Notes in Electrical Engineering, vol 399. Springer, Singapore. https://doi.org/10.1007/978-981-10-2404-7_9
Download citation
DOI: https://doi.org/10.1007/978-981-10-2404-7_9
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2403-0
Online ISBN: 978-981-10-2404-7
eBook Packages: EngineeringEngineering (R0)