
Abstract
Structure monitoring technology is gradually applied in the field of hydraulic structure; However, the traditional electrical sensor technology has some limitations in the field of hydraulic structure monitoring system, especially for long-term and real-time structure monitoring. In order to achieve long-term and real-time monitoring of hydraulic structures, Fiber Bragg Grating (FBG) sensor technology is adopted in engineering practice in this paper, and first used in a high-pile wharf structure monitoring system of a supported project, the results of loading test and finite analysis verified that FBG sensors have great advantages in hydraulic structure monitoring.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In structure monitoring fields, vibrating wire sensors are often used to monitor the strain and displacement of the structure components, accelerometers are used to monitor the vibration parameters, and they have the common features that the input and output signals are all electric signal. However, the sensors are usually working in bad environment, electrical signal in this environment is usually influenced by Electromagnetic, simultaneously, the weaves and corrosive of the seawater make the electrical sensors been more easily damaged, thus, the structure monitoring systems based on electrical sensors are weak on long-term and real-time structure monitoring. Compared with electrical sensors, Fiber Bragg Grating (FBG) sensors have great advantages in hydraulic structure monitoring filed; they have a dual function of sensing and transmission. Besides, FBG sensors have some other performances, such as anti-interference ability, corrosion resistance, safety and reliability, durability and high sensitivity, making them very suitable for long-term monitoring of hydraulic structures. In this paper, FBG sensors are first used in the structure monitoring system to monitor the strain, displacement and structure vibration of a hydraulic structure.
2 The Performance of FBG Sensors
2.1 FBG Strain Sensors
FBG strain sensors must consider the cross sensitivity between temperature and strain. The sum of the strains caused by the temperature and the load of the object can be given as Eq. 1 (Fig. 1).

FBG strain sensor and wavelength characteristic
The strain only caused by the change of the load is calculated by Eq. 2.
In Eq. 2, \( \varepsilon_{0} \) Represents the total strains (unit: \( \upmu \upvarepsilon \)); \( \varepsilon \) Represents the strain caused by load (unit: \( \upmu \upvarepsilon \)); \( K \) is the coefficient of the strain gauge strain (unit: \( \upmu \upvarepsilon /{\text{nm}} \), \( K = 816.33514455 \)); \( B \) is the temperature correction coefficient of the FBG sensor(unit: \( \upmu \upvarepsilon /{\text{nm}} \), \( B = - 877.5708325 \)); \( \lambda_{1} \) is the current wavelength value of the grating(unit: \( {\text{nm}} \)); \( \lambda_{0} \) is the initial wavelength value of the grating (\( {\text{nm}} \), \( \lambda_{0} = 1558.827 \)); \( \lambda_{t1} \) is the current wavelength value of the temperature compensation grating, (unit: \( {\text{nm}} \)); \( \lambda_{t2} \) is the initial wavelength value of the temperature compensation grating, (unit: \( {\text{nm}} \)); \( \alpha \) is the thermal expansion coefficient of the object being measured, (unit: \( \upmu \upvarepsilon /^\circ {\text{C}} \)); \( \Delta T = 100 \times (\lambda_{t1} - \lambda_{t0} ) \) (unit: °C).
2.2 FBG Displacement Sensors
The displacement can be given as Eq. 3 (Fig. 2).

FBG displacement sensor and wavelength characteristic
\( A,B,C \) is the coefficients of the polynomial (\( A = 3.769703159 \), \( B = 20.49708772 \), \( C = 0.027215851 \)); \( \Delta L \) is the change in length of the FBG displacement sensor(unit: mm); \( \lambda_{1} ,\lambda_{2} \) is the current wavelength values of the grating(unit: nm); \( \lambda_{10} ,\lambda_{20} \) is the initial wavelength value of the grating(unit: nm, \( \lambda_{10} = 1551.657\,{\text{nm}} \), \( \lambda_{20} = 1549.438\,{\text{nm}} \)).
2.3 FBG Displacement Sensors
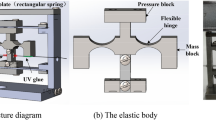
The accelerometer can be calculated by Eq. 4 (Fig. 3).

FBG accelerometer and wavelength characteristic
In Eq. 4, \( a \) represents acceleration; \( \Delta \lambda \) represents the wavelength variation of the peaks and valleys. \( K \) represents the sensitive of the sensor.
3 The Monitoring System
3.1 Support Project
The total length of the wharf is 371.66 m, including the wharf platform length 330 m, width 34 m, distance between the rows is 10.4 m, divided into 5 segments, each row has 6 piles, 2 straight piles and 2 pair of fork piles. The wharf bears important task of production, port average tonnage of the ship continue rise, in order to meet the needs of production, waters on the dock were repeatedly dredged by owners, improved to 20 million tons berths production transformation (Figs. 4 and 5).

Structural facade of supported project

Structural section of supported project
3.2 Monitoring Items
3.2.1 Strain Monitoring
Vertical load of high pile wharf includes structure self gravity, bulk cargo load, transport machinery load and railway load. The entire load is carried by the ground, cross beam, longitudinal beam and the beam panel of high pile wharf in the form of coverage and focus. Based on the structure stress analysis, the structure monitoring system needs monitor the strain changes of the high pile wharf; the strain monitoring nodes should be deployed at the structure panel, longitudinal and cross beams and foundation piles.
3.2.2 Relative Displacement Monitoring
Component damage is most likely to occur on the high pile wharf, the front cap of structure contains main panel, pile cap, pile, and shipping components and so on, and all the components are made a continuous structure by reinforced concrete.
Analyzing the damage factories, relative displacement of pier of is caused directly by slope deformation, horizontal displacement is caused by silt clay layer at the wharf, and horizontal displacement can caused the dislocation between the components at the back cap, the increasing load of the yard is the mainly reason of the wharf slope deformation. Corrosion of external environment creates a condition for relative dislocation between the piles and the beams.
After analyze the damage of the components and the relative displacement between the components, according to the relevant specifications and standards of the structure detection, structure health monitoring system must monitor the relative displacement of the components.
3.2.3 Terminal Displacement Monitoring
Due to the inhomogeneous geological structure, the plastic deformation of sub grade and the load of the structure and the working load, the displacement and settlement of the wharf can be occurred; large displacement and settlement may result in the dislocation of the component’s cracking or the dislocation of the joint, finally leading to the reduction of the structure durability. The observation of the continuous deformation of the pier is an effective way to grasp the safety condition of the wharf and find out the problem in time. The overall displacement monitoring of the wharf mainly includes horizontal and vertical displacement.
3.2.4 Vibration Monitoring
Monitoring the vibration situation is important; vibration attribute is one of the unique properties of structure. There are three main aspects. First of all, monitoring the ship whether has a collision behavior, timely detection the emergencies. Second, the system monitors the vibration of the structure under the working load. Third content is to monitor the development and change of structure vibration trend.
3.3 Monitoring Items Installation of FBG Sensors
In supported project, the sampling rate of FBG strain sensor and FBG displacement sensor is 1 Hz, the sample rate of FBG accelerometer is 50 Hz. Data is stored in a unified format into the industrial computer and finally into the database (Figs. 6, 7, 8, 9 and 10).

Deployment of FBG sensors in high piled wharf

Deployment of FBG sensors in high piled wharf

The installation of the FBG sensor

FBG sensor demodulation

Industrial personal computer
4 Monitoring Data and Simulation Data of FBG Sensors
4.1 Finite Analysis of Strain Changes
In order to prove the correctness of data acquisition, a step by step load test of the wharf structure is carried on, Due to space limitations, this paper only analysis the strain data (Table 1).
Model dimensions are based on actual size of the project. Finite element analysis tool ANSYS is adopted, contact unit types are targe170 and contac173. High pile wharf is a kind of linear elastic constitutive model. Ground is classic Drucker-Prager model. Figure 11 shows the high pile wharf finite element model.

High pile wharf finite element model
In calculating progress, simulated load is carried on. The load values ranges from 0 to 200 tons, obtaining the load-strain relationship at the observation points as the leaning samples. Parts of statistical results of numerical analysis are shown in Table 2.
4.2 Load Test on Support Project
In supported project, the FBG strain sensors are arranged on a row of a certain structure, the positions of the FBG strain sensors are shown in Fig. 12.

Positions of FBG strain sensors
For bearing capacity prototype test of high-piled wharf piles, there is no related technical specifications, in the test, loading and unloading processes referenced to the existing relevant technical regulations. The test load is 10 MN; loading process is shown in Table 3. In order to ensure the accuracy of the data, the sensor data is collected after each load when the sensor data is stable. The initial data collected by FBG sensors are wavelength, by formula (1) and (2), the strain parameters can be obtained, the calculated results of the test are shown in Table 3.
4.3 Performance of FBG Sensors
Compared the simulation data and test data from different piles, we can conclude that (Figs. 13, 14, 15, 16, 17 and 18):

Data from 1st pile

Data from 2nd pile

Data from 3rd pile

Data from 4th pile

Data from 5th pile

Data from 6th pile
-
1.
The data from the FBG sensors can fully reflect the change trend of the structure strain under the certain load.
-
2.
The data collected by FBG sensors are smaller than the simulation data, after analyzing the test progress, the reason maybe the installation of the sensors.
5 Conclusions
In this paper, FBG sensor is introduced into the structure monitoring system of high pile wharf structure, the characteristics of FBG sensors are analyzed. In support project, FBG sensors are adopted, in order to verify the accuracy of FBG sensors, loading test and finite analyze are carried on, simulation data was obtained by finite analysis, test data was obtained through supported project, after analyze the results, we can draw the following conclusions.
-
1.
In order to verify the accuracy of the data from the structure monitoring system, load test and simulation method can be taken.
-
2.
In the fields of hydraulic structures, FBG sensors have great advantages compared with other sensors considering the durability.
-
3.
The installation of the FBG sensors must take correct methods and carry out effective protections, making the data from the sensors being more accurate.
References
Brown, B., Aaron, M.: The politics of nature. In: Smith, J. (ed.) The rise of modern genomics, 3rd edn. Wiley, New York (2001)
Dod, J.: Effective substances. In: The dictionary of substances and their effects. Royal Society of Chemistry (1999). Available via DIALOG. http://www.rsc.org/dose/title of subordinate document. Cited 15 Jan 1999
Slifka, M.K., Whitton, J.L.: Clinical implications of dysregulated cytokine production. J. Mol. Med. (2000). doi:10.1007/s001090000086
Smith, J., Jones Jr., M., Houghton, L., et al.: Future of health insurance. N. Engl. J. Med. 965, 325–329 (1999)
South, J., Blass, B.: The future of modern genomics. Blackwell, London (2001)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Science+Business Media Singapore
About this paper
Cite this paper
Xu, J., Ge, G. (2017). Application of FBG Sensors in High-Pile Wharf Structure Monitoring System. In: Lu, H. (eds) Proceedings of the Second International Conference on Intelligent Transportation. ICIT 2016. Smart Innovation, Systems and Technologies, vol 53. Springer, Singapore. https://doi.org/10.1007/978-981-10-2398-9_4
Download citation
DOI: https://doi.org/10.1007/978-981-10-2398-9_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2397-2
Online ISBN: 978-981-10-2398-9
eBook Packages: EngineeringEngineering (R0)