
Abstract
We propose a new Quaternion Circularly Semi-Orthogonal Moments for color images that are invariant to rotation, translation and scale changes. In order to derive these moments we employ the recently proposed Circularly Semi-Orthogonal Moment’s expression. Invariant properties are verified with simulation results and found that they are matching with theoretical proof.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Processing and analysis of color images represented by a quaternion algebra provides better results than the traditional methods like processing of three (R, G, B) images separately because in the quaternion representation, a color image pixel is treated as a single unit. One of the first persons who employed the quaternion algebra for color images is Sangwine [1]. Since then may techniques like Fourier transform [2, 3], Winer filter [4], Zernike moments [5, 6], Disc-Harmonic moments [7–11], Legendre-Fourier moments [12], FourierMellin moments [13] and Bessel Fourier moments [14–16] are extended to color images using the Quaternion algebra. Recently, Karakasis et al. [17] published a unified methodology for computing accurate quaternion color moments. Another recent paper by Chen et al. [18] suggested a general formula for quaternion representation of complex type moments.
All these moments provided mixed results for image reconstruction, object recognition and water marking problems. Recently, Hu et al. [19] proposed an Exponent Fourier moments for gray level images. These moments are similar to Polar Complex Exponential Transforms and Radial Harmonic Fourier Moments. Exponent Fourier moments are computationally inexpensive as compared with other moments like Zernike Bessel Fourier moments [17]. Xia et al. [20] pointed out some errors in the above paper and proposed a better radial function. Unfortunately, this expression turns out to be incorrect. Hence, Hu et al. [21] recently suggested an improved version of it. Most of these moments suffer from numerical and geometric errors. In order to minimize these errors, Wang et al. [22] proposed a Circularly Semi-Orthogonal (CSO) moments for both binary and multilevel images only. Hence, in this paper, we extend the CSO moments proposed for gray level images to color images using the algebra of quaternion and propose a new quaternion circularly semi orthogonal (QCSO) moments for color images. Further, we also derive invariants properties of QCSO moments and verified them with simulation results. In this study we have chosen CSO moments because of the following advantages: (a) Higher order moments are numerically stable than the lower order moments. (b) Zeroth order approximation is more robust to numerical errors compared with other approximations and (c) no factorial terms in the radial function definition
This paper is organized into eight sections. In Sect. 2 we present the quaternion number system. In Sect. 3 circularly semi orthogonal moments are discussed in detail. In Sects. 4 and 5, expressions are derived for Quaternion circularly semi orthogonal forward and inverse moments. Invariant properties of QCSO moments are derived in Sect. 6. Finally, simulation results and conclusions are presented in Sects. 7 and 8 respectively.
2 Quaternion Number System
These numbers are extensions of complex numbers, that consists of one real part and three imaginary parts. A quaternion number with zero real part is called pure quaternion. Quaternion number system was introduced by the mathematician Hamilton [23] in 1843. Then Sang wine [1, 23] applied them for color image represntation. A quaternion number q is written as
Where a, b, c and d are real numbers, i, j and k are orthogonal unit axis vectors satisfies the following rules
From these equations one can say that quaternion multiplication is not commutative. Both conjugate and modulus of a quaternion number q is
For any two quaternion numbers say p and q we have \(\overline{p.q} = \bar{p}.\bar{q}\). Quaternion representation of a pixel in a color image is
It is assumed that real part is zero. In the above expression \(f_{R} (x,\,y),\,f_{G} (x,\,y) and f_{B} (x,\,y)\) represents the red, green and blue components of a color pixel, similarly, polar representation of an image using the quaternion representation is
In this expression \(f_{R } (r,\,\theta ), \,f_{G} (r,\,\theta ) \,and\,f_{B} (r,\,\theta )\) denote red, green and blue components of polar representation of image.
3 Circularly Semi-orthogonal Moments
Let \(f(r,\,\theta )\) be the polar representation of a gray level image of size N × M, then the general expression for circularly orthogonal moments (\(E_{nm} )\) of order n and repetition m of a polar image \(f(r,\,\theta )\) is
where \({\text{n}}\, = \, \pm 0, \, \pm 1,\, \pm 2\, \ldots \ldots \ldots .\) and \(m\, = \, \pm 0, \, \pm 1, \, \pm 2 \ldots \ldots\) are the moment order and repetition of a radial function \(T_{n} (r)\) and \(T_{n }^{*} (r)\) is the conjugate of radial function \(T_{n} (r)\). It is noted from the available literature that, most of the circularly orthogonal moments differ only in Radial functions and normalization constants. Hence, Table 1 shown below lists some of the radial functions proposed recently for defining moments.
Xia et al. [20] pointed out some errors in the radial function of Exponent Fourier moment-I. In order to correct them, a new expression was suggested for Exponent Fourier moments-I, which is given by
where \(a_{n} = \exp ( - j4n\pi^{2} )\) is normalization constant. Modified radial function \(T_{r} (r)\) is given by
Recently, Hu et al. [21] suggested an improved version of the above expression, because incorrect orthogonality condition was employed to find the normalization constant and when the limits for r are applied, no value will be within the 0 to 2 \(\pi\) range. Hence, an Improved Exponent Fourier moments (IEF) moment expression is suggested and it is given by.
where k is a non negative integer and \(f\left( {r - k,\theta } \right)\) is the translated version of original image \(f(r,\theta )\). Another circularly semi orthogonal moments whose radial bases functions are same for forward and inverse transforms was proposed by Wang et al. [22]. Like the other radial bases functions this radial bases function also do not use factorial terms. Hence, it is computationally not expensive. Figure 1 display the graphs of real parts of \(T_{n} (r)\) for orders n = 0, 1, 2, 3, 4 and 5. These graphs are numerically stable and avoids the large value in the above expression when r = 0. Given a finite number of moments (N max and M max ) image reconstruction can be obtained using the expression given below

Real part of radial function T n (r) for n = 0, 1, 2, 3, 4, 5 values. x axis denotes ‘r’ values (1 to 2, in steps of 0.001) and y real part of radial function. Colors n = 0, blue, n = 1, green, n = 2, red, n = 3 black, n = 4, cyan, n = 5 magenta
According to the above equation, pixels of reconstructed image must be shifted by a distance k along the opposite direction. If we substitute \(T_{n} (r) = (15)^{{ - \frac{r}{4}}} \sin (n + 1)\pi r\) and Z = 2π in Eq. (5), we obtain an expression for Circularly semi orthogonal moments that is given below
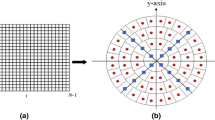
In order to convert the above equation suitable for 2D images of size M × N, we need a polar representation of the image and replace the integrals by summation. In our work we employed the ‘Outer Unit Disk Mapping’ employed by Hu et al. [19] which fixes the image pixels inside the unit circle. Expression for coordinate mapping is
where i = 0, 1…M, j = 0, 1, …N. Final expression when zeroth order approximation of Eq. (6) is used
where \(\frac{1}{Z} = \frac{2}{{\pi \left( {M^{2} + N^{2} } \right)}}\), \(r_{ij} = \sqrt {x_{i}^{2} + y_{j}^{2} }\) and \(\theta_{ij} \, = \,\tan^{ - 1} \frac{{y_{j} }}{{x_{i} }}\)
More details can be seen in paper [19]. Next section presents Quaternion circularly semi orthogonal moments.
4 Quaternion Circularly Semi-orthogonal Moments
According to the definition of circularly semi-orthogonal moments (CSOM) (Eq. 6) for gray levels and quaternion algebra, the general formula for the right side CSOM of a color image \(f(r,\theta )\) of order n with repetition m is
where \(\mu\) is a unit pure quaternion, generally it is a linear combination of i, j and k such that its magnitude is unity. In this work \(\mu\) is taken as \(\mu = \frac{i + j + k}{\sqrt 3 }\). Quaternion is not commutative. Hence, we obtain left side expression, which is given by
In this work we consider only right side expression and drop out the symbol R. Relationship between these two expressions is \(E_{nm}^{L} = - \overline{{E_{n, - m}^{R} }}\), it can be derived using the conjugate property. Next, we derive an expression for implementation of \(E_{nm} ,\). substituting Eq. (4) into Eq. (8), we get
Let
Equation (9) can be written as
\(A_{nm}\), \(B_{nm}\) and \(C_{nm}\) are complex values, hence, the above equation can be expressed as
Substituting for \(\mu = \frac{i + j + k}{\sqrt 3 }\) and simplifying the above expression using Eq. 2 we get
In order to express the above equation in a better way we let
\(S1 = - \frac{1}{\sqrt 3 }\left[ {A_{nm}^{I} + B_{nm}^{I} + C_{nm}^{I} } \right]\), \(S2 = \left[ {A_{nm}^{R} + \frac{1}{\sqrt 3 }\left( {B_{nm}^{I} - C_{nm}^{I} } \right)} \right]\), \(S3 = \left[ {B_{nm}^{R} + \frac{1}{\sqrt 3 }(C_{nm}^{I} - A_{nm}^{I} )} \right]\) and \(S4 = \left[ {C_{nm}^{R} + \frac{1}{\sqrt 3 }(A_{nm}^{I} - B_{nm}^{I} )} \right]\), now the above equation can be expressed as
\(E_{nm} = S1 + iS2 + jS3 + kS4\). In next we derive the expression for quaternion inverse circularly semi-orthogonal moments.
5 Quaternion Inverse Circularly Semi-orthogonal Moments
Given a finite number up to a given order L of Quaternion Circularly Semi orthogonal moments, we find the approximated image \(f(r,\theta )\) using the equation given below
Substituting \(E_{nm}\) from the above equation we get
Substituting, \(\mu = \left( {\frac{i + j + k}{\sqrt 3 }} \right)\) in the above expression and after simplification we get expression for inverse QCSO moments as
where each term is equal to
In this expression real (.) and imag (.) terms denote real and imaginary part of the value within the bracket. Each term represents the reconstruction matrix of s1, s2, s3 and s4 respectively and they are determined using
These expressions can be easily implemented using equation Eq. 7.
6 Invariant Properties of QCSO Moments
Let \((r,\theta )\) and \(f(r,\theta - \varphi )\) be the un rotated and rotated (by an angle φ) images expressed in polar form, then QCSO moments of a rotated image is
Let \(\bar{\theta } = \theta - \varphi\) then d \({\text{d}}\theta = d\bar{\theta }\), substituting it in the above equation we obtain a rotated QCSO moments as
Applying modulus operation on both sides of the above equation we get
Rotation of an image by an angle φ does not change the magnitude, but the phase changes from \({-}\mu m\theta\, to - (\mu m\theta + \mu m\varphi )\). Hence, we say that rotation does not change magnitude, therefore it is invariant to rotation. Translation invariant is achieved by using the common centroid \(\left( {x_{c} ,\,y_{c} } \right)\) obtained using R, G, B images. This procedure was suggested by Fluser [24] and employed by number of researchers like Chen et al. [18], Nisrine Das et al. [7]. Procedure consists of fixing the origin of the coordinates at the color image centroid obtained using
where \(m_{00}^{R} ,\, m_{10}^{R} , \, m_{01}^{R}\) are the geometric moments of R image, whereas G and B superscripts denote green and blue images, using the above coordinates, QCSO moments invariants to translation is given by
where \(\bar{r} = \sqrt {(x - x_{c} )^{2} + (y - y_{c} )^{2} }\) \(\bar{\theta } = \tan^{ - 1} \left( {\frac{{y - y_{c} }}{{x - x_{c} }}} \right)\).
Moments calculated using the above expression are invariant to translation. In most of the applications like image retrieval, images are scaled moderately, then the scale invariant property is fulfilled automatically, because, QCSO moments are defined on the unit circle using Eq. 6a [10].
Another useful property is flipping an image either vertical or horizontal. Let \(f(r,\theta )\) be the original image, \(f(r, - \theta )\) and \(f(r,\pi - \theta )\) be the vertical and horizontal flipped images. One of the color images flipped vertically and horizontally are shown in Fig. 2. We derive its QCSO moments. QCSO moments of the flip vertical image is

Flipped, rotated and translated images
Substituting \(\emptyset = - \theta ,\) \(d\emptyset = - d\theta\), and Simplifying the above equation, we obtain the moments as
where \(E_{nm}^{ \cdot }\) is the complex conjugate of the QCSO moments. QCSO moments of flip horizontal image is given by
Substituting \(\varnothing = \pi - \theta\), \(d\varnothing = - d\theta\), we obtain the moments as
Hence, one can compute the flipped image moments using the above equation. Some of the properties like invariance to contrast changes can be verified by normalizing moments by E 00.
7 Simulation Results
In order to verify the proposed Quaternion circularly semi orthogonal moments for both reconstruction capability and invariant for rotation, translation, and flipping we have selected four color images namely, Lion image, Vegetable image, Parrot image and painted Mona Lisa images and computed their QCSO moments and these color images are shown in Fig. 2, down loaded from Amsterdam Library of objects, reconstructed using only moments of order 40 (L = 40 in Eq. 10). Obtained results are shown in Fig. 3. High frequency information like edges is well preserved. These images (Lion image is shown in Fig. 2) are rotated by 2 degrees in clock wise using IMROTATE function available in MATLAB 2010 software and magnitude of only few QCSO moments are computed and results are reported in Table 2. From these results we can note that before and after rotation QCSO moments are almost equal. We have also verified translated property by translating Lion image and Vegetable images by 2 units in x direction (dx = 2) and 1 unit (dy = 1) in y direction. Their results (magnitude of E nm ) computed using Eq 11 are shown in Table 3. Difference, between the moments before and after translation is very small. Finally, moments (magnitude of E nm ) calculated for flipped vertical images are reported in Table 4.

Original and reconstructed Images using QCSO Moments
8 Conclusions
In this paper we proposed a new Quaternion circularly semi orthogonal moments for color images. Further, we have showed that these moments are invariant to rotation, scale, translation and we also derived moments for flipped color images. Presently, we are applying these moments both for color and monochrome super resolution problems.
References
S.J. Sangwine, “Fourier Transforms of color images using quaternion or Hypercomplex, numbers”, Electronics Letters vol 32, Oct, 1996.
T.A. Ell and S.J. Sangwine, “Hyper-complex Fourier Transforms of color images”, IEEE Trans Image Processing, vol 16, no1 Jan 2007.
Heng Li Zhiwen Liu, yali Huang Yonggang Shi, “ Quaternion generic Fourier descriptor for color object recognition, “ Pattern recognition, vol 48, no 12, Dec 2015.
Matteo Pedone, Eduardo, Bayro-Corrochano, Jan Flusser, Janne Hakkila, “Quaternion wiener deconvolution for noise robust color image registration”, IEEE Signal Processing Letters, vol 22, no 9, Sept, 2015.
C.W. Chong, P. Raveendran and R. Mukundan, “ The scale invariants of Pseudo Zernike moments”, Patter Anal Applic, vol 6 no pp 176–184, 2003.
B.J. Chen, H.Z. Shu, H. Zhang, G. Chen, C. Toumoulin, J.L. Dillenseger and L.M. Luo, “Quaternion Zernike moments and their invariants for color image analysis and object recognition”, Signal processing, vol 92, 2012.
Nisrine Dad, Noureddine Ennahnahi, Said EL Alaouatik, Mohamed Oumsis, “ 2D color shapes description by quaternion Disk harmonic moments”, IEEE/ACSint Conf on AICCSA, 2014.
Wang Xiang-yang, Niu Pan Pan, Yang Hong ying, Wang Chun Peng, Wang Ai long, “ A new Robust color image watermarking using local quaternion exponent moments”, Information sciences, vol 277, 2014.
Wang Xiang, Li wei-yi, Yang Hong-ying, Niu Pan Pan, Li Yong-wei, “Invariant quaternion Radial Harmonic fourier moments for color image retrieval”, Optics and laser Technology, vol 66, 2015.
Wang Xiang-yang, Wei-yi Li, Yang Hong-ying, Yong-wei Li “ Quaternion polar complex exponential transform for invariant color image description”, Applied mathematical and computation, vol 256, April, 2015.
Pew-Thian Yap, Xudong Jiang Alex Chi Chung Kot, “ Two Dimensional polar harmonic transforms for inavariant image representation, IEEE Trans on PAMI (reprint).
C. Camacho. Bello, J.J. Baez-Rojas, C. Toxqui-Quitl, A. Padilla-vivanco, “Color image reconstruction using quaternion Legendre-Fourier moments in polar pixels”. Int Cof on Mechatronics, Electronics and Automotive Engg, 2014.
J. Mennesson, C. Saint-Jean, L. Mascarilla, “ Color Fourier-Mellin descriptors for Image recognition”, Pattern Recognit, Letters vol, 40, 2014 pp.
Zhuhong Sha, Huazhong Shu, Jiasong wu, Beijing Chen, Jean Louis, Coatrieux, “Quaternion Bessel Fourier moments and their invariant descriptors for object reconstruction and recognition”, Pattern Recognit, no 5, vol 47, 2013.
Hongqing Zho, Yan Yang, Zhiguo Gui, Yu Zhu and Zhihua Chen, “Image Analysis by Generalized Chebyshev Fourier and Generalized Pseudo Jacobi-fourier Moments, Pattern recognition (accepted for publication).
Bin Xiao, J. Feng Ma, X. Wang, “ Image analysis by Bessel Fourier moments”, Pattern Recognition, vol 43, 2010.
E. Karakasis, G. Papakostas, D. Koulouriotis and V. Tourassis, “A Unified methodology for computing accurate quaternion color moments and moment invariants”, IEEE Trans. on Image Processing vol 23 no 1, 2014.
B. Chen, H. Shu, G. Coatrieux, G. Chen X. Sun, and J.L. Coatrieux, “Color image analysis by quaternion type moments”, journal of Mathematical Imaging and Vision, vol 51, no 1, 2015.
Hai-tao-Hu, Ya-dong Zhang Chao Shao, Quan Ju, “Orthogonal moments based on Exponent Fourier moments”, Pattern Recognition, vol 47, no 8, pp. 2596–2606, 2014.
Bin Xiao, Wei-sheng Li, Guo-yin Wang, “ Errata and comments on orthogonal moments based on exponent functions: Exponent-Fourier moments”, Recognition vol 48, no 4, pp 1571–1573, 2015.
Hai-tao Hu, Quan Ju, Chao Shao, “ Errata and comments on Errata and comments on orthonal moments based on exponent functions: Exponent Fourier moments, Pattern Recognition (accepted for publication).
Xuan Wang, Tengfei Yang Fragxia Guo, “Image analysis by Circularly semi orthogonal moments”, Pattern Recognition, vol 49, Jan 2016.
W.R. Hamilton, Elements of Quaternions, London, U.K. Longman 1866.
T. Suk and J. Flusser, “Affine Moment Invariants of Color Images”, Proc CAIP 2009, LNCS5702, 2009.
Acknowledgements
Author would like to thank Dr. B. Rajendra Naik, Present ECE Dept Head and Dr. P. Chandra Sekhar, former ECE Dept Head for allowing me to use the Department facilities even after my retirement from the University.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Science+Business Media Singapore
About this paper
Cite this paper
Ananth Raj, P. (2017). Quaternion Circularly Semi-orthogonal Moments for Invariant Image Recognition. In: Raman, B., Kumar, S., Roy, P., Sen, D. (eds) Proceedings of International Conference on Computer Vision and Image Processing. Advances in Intelligent Systems and Computing, vol 460. Springer, Singapore. https://doi.org/10.1007/978-981-10-2107-7_46
Download citation
DOI: https://doi.org/10.1007/978-981-10-2107-7_46
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2106-0
Online ISBN: 978-981-10-2107-7
eBook Packages: EngineeringEngineering (R0)