
Abstract
Following up on the classical solutions by Love for a linear-elastic self-gravitating sphere, this paper presents the corresponding extension to a linear viscoelastic body of the Kelvin–Voigt type. The solution is expressed in closed form by making use of Laplace transforms. Applications to the genesis of terrestrial planets are sought and the evolution of the Love radius and possible extensions to large deformations are discussed. As a new result, it turns out that in the early days of planet formation there is no Love radius and that it takes time for the Love radius to develop.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 What This Paper Is About and What It Is Not
Viscoelasticity is of current interest to geology. Typically geologists investigate the temporal evolution of deformation within the Earth’s outer crust caused by earthquakes or other gravitational load shifts such as melting ice, using viscoelastic material models, e.g., Campbell (1974), Ragazzo and Ruiz (2015) and Tanaka et al. (2009).
The present paper is not going in this direction at all. Rather it is a idealistic continuum approach toward an understanding of the genesis of terrestrial planets and the subsequent state of deformation in a large self-gravitating object. However, there is also a certain esthetic aspect in the solution we are about to present, and in order to quote Keats we may say that “beauty is truth, truth beauty.” More specifically, our result is a follow-up on the classical solutions found by the great A.E.H. Love for a self-gravitating linear-elastic sphere, see Love (1892, 1906, 1927). We shall extend his beautiful formulae to a linear-elastic model of the Kelvin–Voigt type. In other words, we will explore the temporal development of the static linear-elasticity solution of a self-gravitating terrestrial planet. In particular, we shall look at the temporal evolution of the Love radius, i.e., the position of the transition zone between compression and tension within a self-gravitating “solid” sphere. This may even be of practical use, since it is related to damage during the early stages of a developing terrestrial planet. However, we shall not endeavor to investigate this in full quantitative detail, at least not here. Surprisingly, our results will be of closed form, thanks to the efforts of one of the authors in a completely different field of research, cf. Frelova (2016). This shows the power of continuum theory: Everything is connected, a maxim we chose to start our salute to our esteemed colleague Holm Altenbach!
2 Literature Review and Putting the Problem into Perspective
Today it is a commonly accepted opinion that terrestrial planets, such as Mercury, Venus, Earth, and Mars, but also other huge solid celestial objects, specifically the Moon,Footnote 1 are the result of a coagulation process of “rocky” matter, a.k.a. “planetesimals,” to form so-called “protoplanets” during the early stages of the developing solar system, cf., Wetherill (1990). In order to quote Lissauer (1993), pg. 134: “... in this picture, planet formation is fundamentally different from star formation in that planetary growth begins with the accumulation of solid bodies, with the accretion of substantial amounts of gas occurring after a planet becomes sufficiently massive ...” and, pg. 136, “... These planetesimals continue to agglomerate via pairwise mergers. ... Growth via binary collisions proceeds until the protoplanets become dynamically isolated from each other.”
Hearing all this, we might conclude that the mathematical modeling of the genesis of a planet is exclusively numerical and within the field of discrete mechanics or (better) discrete systems, since there will be thermodynamics aspects involved, see, e.g., Kenyon (2006). However, it is always wise to look at a problem from different angles and, consequently, we promote the continuum perspective in what follows.
Let us consider the following scenario: A spherical, initially homogeneous, unstressed sphere (the planet in statu nascendi) undergoes self-gravity. We must ask as to whether static equilibrium is possible and how it is reached? Two rather idealized scenarios come to mind.
First, imagine that gravity is “suddenly switched on.” Then, we will essentially face a situation similar to that of a moving masspoint connected to a linear-elastic Hookean spring: Due to the inertial terms in the equation of motion and due to the potential of a linear oscillator pertinent to a radially symmetric, self-gravitating sphere, this sphere will begin to shrink below the radius determined by static equilibrium of forces. While doing so, stress-related forces will build up so that the sphere will finally start to rebounce. Provided there is no dissipation it will reach its initial radius again. This will happen over and over if we assume the material of the sphere to be perfectly elastic without internal friction and without heat conduction, so that isothermal conditions prevail. In other words, without dissipation there will be a constant exchange between the elastic energy, the gravitational potential, and the kinetic energies: The motion of the self-gravitating matter would never come to a standstill. Of course, in the real world there are dissipative processes acting. The shrinking will be accompanied by dissipation in terms of viscoelastic or viscoplastic deformation, and there will be heat conduction. All of this will, in the end, bring motion to a standstill, and the sphere will arrange itself in thermomechanical equilibrium, i.e., there will be equilibrium of gravitational and inner, stress-related forces in a state of homogeneous temperature. It should be mentioned that the final equilibrium state of a self-gravitating sphere has been modeled in closed mathematical form at the end of the nineteenth century by Love (1892), who used linear elasticity at small deformations for this purpose. The interested reader will find detailed information about Love’s solution and interpretation in the Appendix.
In conclusion, we shall not attempt to model the dynamic transition toward that equilibrium for various reasons. First of all, its treatment would be fully numerical based on large deformations expressed in terms of velocities. This makes it difficult if not impossible to compare it to Love’s analysis of equilibrium, which was based on small strains. Moreover, choosing an adequate numerical technique would be required. Surely there will be more than one, all of them with certain pros and cons. Finally, the question which initial conditions are appropriate is difficult to answer, since gravity is not simply “switched on” but always present. Hence in terms of capturing reality our dynamic continuum model could not seriously compete with the discrete mechanics approach of planetesimal masses bouncing into each other, sticking together, and finally forming a primordial planet that relaxes stress- and displacement-wise under the influence of their mutual gravitational attraction. In short, the fully dynamic continuum model requires too much effort for little gain.
For all these reasons, we shall eat humble pie and turn alternatively to a quasistatic treatment instead. This way inertial forces in the equations of motion can be neglected and the self-gravitating sphere will quasistatically and isothermally move into its final state of deformation. Such a situation is frequently conjured up in so-called \(p\,\mathrm {d}V\)-thermodynamics, for example, if we allow the pressure on a piston to change very slowly so that the gas which is trapped in the corresponding container has time to accommodate pressure- and temperature-wise. However, in our approach the time parameter will enter through a viscoelastic model used to connect stresses, strains, and their corresponding rates. More specifically, in order to be able to study the temporal development of the solution for the displacements, strains, and stresses toward Love’s closed-form solutions we will make use of a linear viscoelastic model of the Kelvin–Voigt type, i.e., small deformation theory will reappear.

Stress- versus displacement-controlled viscoelastic experiments (see text)
In this context recall the two fundamental types of quasistatic experiments always mentioned in combination with quasistatic, linear viscoelasticity (see Fig. 1)Footnote 2: In the first one a linear-viscoelastic strip is suddenly subjected to a constant “dead load,” i.e., a constant uniaxial tensile stress (the “cause”), \(\sigma _0\), is prescribed. Under such circumstances we also speak of load-control. The “effect” consists of an elastic strain, \(\epsilon _\mathrm {i}\), instantaneously built up. After that the strip gradually creeps quasistatically toward its final total strain, \(\epsilon _\mathrm {f}\). The counterpart to this experiment consists of prescribing a strain of a fixed amount (the “cause”), \(\epsilon _0\), and to observe the stress response (the “effect”). This is what we call a displacement-controlled test. It turns out that the stress response immediately overshoots to a high level, \(\sigma _\mathrm {i}\), and is then reduced by creeping quasistatically toward a final lower value, \(\sigma _{\mathrm {f}}\). This time we speak of stress-relaxation.
In the following section we shall state and solve the linear-viscoelastic problem for a self-gravitating sphere mathematically and study the behavior of the corresponding solution which, surprisingly, will also be of closed-form. Moreover, we shall also investigate as to whether this fits into the traditional pattern of stress or strain controlled experiments.
3 A Viscoelastic Model of Self-gravitation
3.1 Viscoelasticity of the Kelvin–Voigt Type
Recall the 1D representation of the so-called Kelvin–Voigt model: A Hookean spring and a dashpot are arranged in parallel: Fig. 2. If we apply a displacement, \(\delta \), at the outer points of this rheological model it will be transferred equally to the spring and to the dashpot, \(\delta =\delta _1=\delta _2\), whereas the resulting force is the sum of the forces due to both elements, \(F=F_1+F_2\). In strength-of-materials-terminology we may say that the strains and, hence, the strain rates are equal, \(\epsilon =\epsilon _1=\epsilon _2\Rightarrow \dot{\epsilon }=\dot{\epsilon }_1=\dot{\epsilon }_2\), whereas the stresses are additive, \(\sigma =\sigma _1+\sigma _2\), and where the dot refers to a time derivative. The spring is now modeled by Hooke’s law, \(\sigma _1=E\epsilon _1\), and the dashpot by a Newton–Navier–Stokes relationship, \(\sigma _2=\eta \,\dot{\epsilon }_2\). If we combine these equations, we arrive at:
We can then introduce a strain-based relaxation time,  , which will come in handy once we turn to dimensionless equations.
, which will come in handy once we turn to dimensionless equations.

The Kelvin–Voigt model of 1D linear viscoelasticity
One-dimensional rheological models allow us to find three-dimensional analogues if we accept the daring idea of replacing the 1D stress and strain simply by stress and strain tensors. We proceed to illustrate this idea for the case of the Kelvin–Voigt model, Eq. (1), and write:
Now we assume that the planet can be modeled as a linear, isotropic medium. We therefore consider the following customary constitutive equations for linear elasticity and viscosity during further analysis (the acronyms “dil” and “dev” refer to dilatoric and deviatoric parts of the strain (rate) tensors, respectively):
where k and \(\mu \) refer to the bulk modulus and the shear modulus, respectively. Moreover, \(\eta '\) and \(\eta \) are known as coefficients of bulk and shear viscosity.
If we now combine Eqs. (2) and (3) suitably we finally arrive at the following relation:
Hence, in principle, we must distinguish between two different relaxation times:
where the indices v and s are supposed to remind us of the dilatoric (\(\varvec{\mathrm {v}}\)olumetric) and deviatoric (\(\varvec{\mathrm {s}}\)hear) parts, and the index \(\epsilon \) of the strain-related relaxation process.
However, it is known that the bulk viscosity is a rather elusive parameter and very difficult to measure, see Gad-el Hak and Bandyopadhyay (1995). Therefore, we will neglect it in what follows and obtain from the previous equations because of \(\varvec{\epsilon }^\mathrm {dil}:=\tfrac{1}{3}{{\mathrm{{\textsf {Tr}}}}}\varvec{\epsilon }\varvec{\mathrm {I}}\) and \(\varvec{\epsilon }^\mathrm {dev}:=\varvec{\epsilon }-\varvec{\epsilon }^\mathrm {dil}\):
\(\varvec{\mathrm {I}}\) being the unit tensor.
Our main objective is to determine the displacement, \(\varvec{u}\), in spherical coordinates (for obvious reasons). We assume perfect spherical symmetry, hence \(\varvec{u}=u_r(r)\varvec{e}_r\), \(u_r\) being its radial component and \(\varvec{e}_r\) being the radial unit vector. All necessary equations will be written in spherical coordinates. Specifically, we recall Eqs. (37) and (38) from the Appendix, which we complement by:
Then we obtain analogously to Eq. (39):
The equilibrium conditions (34) hold and we arrive similarly to Eq. (40) at the following Partial Differential Equation (PDE) for \(u_r(r,t)\):
where the dot means differentiation w.r.t time, t, and the dash differentiation w.r.t. position, r.
This PDE must be solved in combination with two boundary conditions and one initial condition. We will study the case of a viscoelastic sphere of outer radius, \(r_\mathrm {o}\). The boundary conditions state that the displacement stays finite and vanishes in the center and that there is no traction at the outer boundary, \(r_\mathrm {o}\):
3.2 Solution in Dimensionless Form
Analogously to Eqs. (47) and (49)\(_1\) we define
Then the PDE (9) assumes the form:
where the dot now refers to differentiation w.r.t. dimensionless time, \(\tau \), and the dash means differentiation w.r.t. dimensionless position, x.
The nonvanishing stresses are normalized by \(\lambda +2\mu \) (identified by a tilde) and read:
The boundary conditions (10) take the following form:
and the initial condition reads:
this is to say that we expect no displacements initially, because “gravitation has just been switched on at \(\tau =0\).”
We solve the PDE (12) by mapping it onto Laplace space w.r.t. time \(\tau \leftrightarrow s\) and then finding a solution of the corresponding Ordinary Differential Equation (ODE). The Laplace transform of the displacement will be identified by a bar, \(\bar{u}=\bar{u}(x,s)\), and we may write according to the usual rules of Laplace transforms:
The term in brackets drops out. We can give two reasons for that. First, there is the initial condition (15), according to which the displacement (and all its derivatives) shall vanish initially. Second, we note that this very term represents the (stationary) ODE of the gravitational problem provided gravitation is not present, see Eq. (40), which is zero to begin with. The solution of the remaining ODE for \(\bar{u}(x,s)\) is completely analogous to the one presented in Eq. (41). We may write:
In order to determine the constants of integration we have to transform the boundary conditions (14) into Laplace space as follows:
For the same reasons as before the term in parentheses in the second equation drops out. The first equation requires us to put \(B=0\). Moreover, the remaining linear equation for A in Eq. (17)\(_2\) can be solved and, after back transform into real time space, the final result reads as follows:
Note that special attention has been given to the case \(\tau =0\): If we consider the limit case \(\tau \rightarrow 0\) we find a nonvanishing initial displacement. Moreover, it can be seen that the initial and boundary conditions from Eqs. (14), (15) are indeed satisfied. For \(\tau \rightarrow \infty \) the stationary relation shown in Eq. (48) is obtained.
We are now in a position to determine the dimensionless stresses from Eq. (13):
It is easy to see that in the limit \(\tau \rightarrow \infty \) the stresses of the stationary solution from Eq. (52) result.
3.3 Evaluation and Discussion of the Results
Figure 3 depicts the temporal evolution of the displacement as a function of radial distance in dimensionless form as predicted by Eq. (19) for the choice \(\nu =0.3\). Note that immediately after “gravity has been switched on” the dependence is nearly linear.Footnote 3 Consequently, the minimum is located at the outer radius \(x=1\). It is an edge minimum and not a “true” minimum with vanishing derivative.

Temporal development of the displacement as a function of radial position (see text)
In this context recall the notion of the “Love radius.” It indicates the position where the radial strains within a self-gravitating sphere changes sign and it was first discovered by A.E.H. Love. In equilibrium this (normalized) position is given by:
and the details of the derivation of the formula can be found in the Appendix.
Also recall that in the present case the radial strain is nothing else but the derivative of the radial displacement w.r.t. position, i.e., the slope to that curve. Moreover, the Love radius is defined by a true minimum of the radial displacement with zero slope. Consequently, in the transient case, a tensile region does not exist initially. It takes a certain while until the prominent feature of a true minimum corresponding to the location of the Love radius evolves.

Temporal development of the Love radius (see text)
We can obtain the location of the Love radius by (formal) differentiation of the displacement shown in Eq. (19) w.r.t. x. The result is:
It is easily seen that this expression tends to the “elastic” Love radius shown in Eq. (21) if \(\tau \) goes to infinity (Fig. 4).
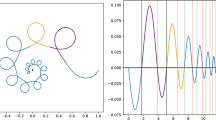
Finally, Fig. 5 presents the (dimensionless) stresses. It is noteworthy that the radial stress component relaxes monotonically without a qualitative change in the shape of the curve. This is not so for the angular stresses, whose minima switch from \(x=1\) to \(x=0\) as time goes on.
Based on the results presented in Figs. 3 and 5, we must conclude that the process of relaxation in a self-gravitating terrestrial planet is not as simple as in the textbook example of a load and displacement-controlled viscoelastic strip shown in Fig. 1. This is due to the fact that we face a three-dimensional state of stress after “switching on” a spatially varying body force.

Temporal development of the stresses (see text)
4 Outlook and Conclusions
The main objective of this paper was to present an analysis of the temporal development of the displacements, strains, and stresses in a self-gravitating sphere. The model was based on a radially symmetric linear viscoelastic constitutive model of the Kelvin–Voigt type. An analytical solution was found based on Laplace transforms. It was shown how the displacement and stresses relax to the stationary linear-elastic solution, originally due to Love, which was also reviewed in an appendix. In particular it was shown that the so-called Love radius, which marks the transition between the regions of compressive and tensile strain, does not exist in the early stages. It takes some time to develop.
In future work we will investigate alternative viscoelastic models, for example a generalization of the Zener type. We will also attempt to predict the relaxation time scales based on recent measurements of the viscosity of (liquid) iron and igneous rock.
Notes
- 1.
It is said that also the gas giants initially need a rocky core of sufficient size which is then able to attract gas, if available in the region of its formation.
- 2.
- 3.
- 4.
The interested reader is referred to Müller and Weiss (2016).
- 5.
The interested reader may want to consult Müller and Weiss (2016) for further information.
References
Bose, S.C., Chattarji, P.P.: A note on the finite deformation in the interior of the Earth. Bull. Calcutta Math. Soc. 55(1), 11–18 (1963)
Campbell, D.L.: The loading problem for a linear viscoelastic Earth: I. Compressible, non-gravitating models. Pageoph 112, 997–1010 (1974)
Chattarji, P.P.: Finite deformation in the interior of the Earth. Bull. Calcutta Math. Soc. 45, 113–118 (1953)
Frelova, X.: A viscoelastic model of the state of deformation of the eye. Master thesis, St Petersburg Polytechnical State University supervised by E N Vilchevskaya (2016)
Gad-el Hak, M., Bandyopadhyay, P.R.: Questions in fluid mechanics. J. Fluids Eng. 117, 3–5 (1995)
Kenyon, B.B.C.S.J.: Terrestrial planet formation. I. The transition from oligarchic growth to chaotic growth. Astron. J. 131(3), 1837–1850 (2006)
Kienzler, R., Schröder, R.: Einführung in die Höhere Festigkeitslehre. Springer, Dordrecht (2009)
Lakes, R.S.: Viscoelastic Materials. Cambridge University Press, Cambridge (2009)
Lissauer, J.J.: Planet formation. Annu. Rev. Astron. Astrophys. 31, 129–174 (1993)
Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity, vol. 1. Cambridge University Press, Cambridge (1892)
Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity, Second edn. Cambridge University Press, Cambridge (1906)
Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity, Fourth edn. Cambridge University Press, Cambridge (1927)
Müller, I.: Thermodynamik—Grundlagen der Materialtheorie. Bertelsmann-Universitäts verlag, Düsseldorf (1973)
Müller, I., Müller, W.H.: Fundamentals of Thermodynamics and Applications: With Historical Annotations and Many Citations from Avogadro to Zermelo. Springer Science and Business Media, Heidelberg (2009)
Müller, W.H., Weiss, W.: The State of Deformation in Earthlike Self-Gravitating Objects. Springer, Singapore (2016)
Ragazzo, C., Ruiz, L.S.: Dynamics of an isolated, viscoelastic, self-gravitating body. Celest. Mech. Dyn. Astron. 122, 303–332 (2015)
Sokolnikoff, I.S.: Mathematical Theory of Elasticity, 4th edn. McGraw-Hill Book Company, Inc., New York (1956)
Tanaka, Y., Klemann, V., Fleming, K., Martinec, Z.: Spectral finite element approach to postseismic deformation in a viscoelastic self-gravitating spherical Earth. Geophys. J. Int. 176(3), 715–739 (2009)
Timoshenko, S., Goodier, J.N.: Theory of Elasticity, 4th edn. McGraw-Hill Book Company, Inc., New York (1951)
Truesdell, C., Toupin, R.: Handbook of Physics: The Classical Field Theories. Springer, Berlin (1960)
Wang, C.C., Truesdell, C.: Introduction to Rational Elasticity, vol. 1. Springer Science and Business Media, Heidelberg (1973)
Wetherill, G.W.: Formation of the Earth. Annu. Rev. Earth Planet. Sci. 18, 205–256 (1990)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix: Love’s Solution—Its History in Modern Form
Appendix: Love’s Solution—Its History in Modern Form
The following passages were primarily written for the benefit of readers who do not solve linear-elastic problems on a daily basis. However, they also contain interpretations not originally provided by Love, for example intuitive explanations of the meaning of the normalizing coefficients for the displacements and for the stresses.
1.1 A.1 The Primary Assumptions of Love and Their Limitations
Love’s solution for the state of deformation in a self-gravitating sphere is a static one. Hence the balance of momentum degenerates to the following equation:
where \(\rho \) denotes the local current mass density, and \(\varvec{\sigma }\) the Cauchy stress tensor. The specific body force, \(\varvec{f}\), i.e., the gravitational acceleration, is conservative and originates from self-gravity. Hence a gravitational potential \(U^\mathrm {grav}(\varvec{x})\) exists, where \(\varvec{x}\) denotes an arbitrary (current) position within the body, and we may write:
The gravitational potential obeys Poisson’s equation:
For the stress tensor we initially assume that Hooke’s law holds, so that there are no rate effects:
where the linear strain tensor has been used:
\(\varvec{u}\) refers to the displacement vector, i.e., to \(\varvec{u}=\varvec{x}-\varvec{X}\), \(\varvec{X}\) being the reference position of a material point of the sphere. \(\lambda \) and \(\mu \) are Lamé’s elastic constants.
At this point three remarks for putting Love’s approach in perspective are in order, which are all related somehow. They all circle around the question “What happens if the deformations prove to be large?” We shall see that they can be large, we want to point out possible remedies, we will provide some citations for further reading, but we shall not endeavor to work it all out in this paper.
The first comment concerns the nabla operator used in the aforementioned equations: Note that all nabla operators above indicate differentiation w.r.t. the current spatial position, \(\varvec{x}\). This is how the theory works for “linear elasticians:” There is only one gradient in linear theory of elasticity at small deformations, namely that one. Hence for them putting an emphasis on it sounds trivial. However, there is a world outside of linear elasticity as understood by Sokolnikoff (1956) or Timoshenko and Goodier (1951), in order to quote just two references of that denomination. Indeed, it is possible to understand linear elasticity as a limit case of nonlinear materials theory. Then Hooke’s law results in a natural way written in terms of gradients with respect to the reference configuration, \(\varvec{X}\), see Wang and Truesdell (1973), pp. 170, or Müller (1973), p. 72. However, in the next breath it is said, see Truesdell and Toupin (1960), Sects. 57 and 301, that it does not really matter, and these gradients can be replaced by derivatives w.r.t. the current position, since the deformations are so small. What they do not say, though, is that it does matter from a principal, didactic point-of-view.
Second, from the standpoint of linear elasticity, the set of Eqs. (23)–(27) serves only one purpose: It allows us to calculate the displacement \(\varvec{u}(\varvec{x})\). To this end the mass density \(\rho (\varvec{x})\) must be considered as known, and for linear-elasticians it is, in the simplest case, a space-independent constant, \(\rho =\rho _0\). If we relate it to our problem we may consider it to be the mass density of the homogeneous sphere before gravity has been switched on. However, recall that this does not mean that the current mass density is also a constant, even if it is one in the reference state. It is dependent on deformation and it can be determined from mass conservation. In general, now turning back to nonlinear theory for a moment, it is well known that we may write:
where \(\varvec{F}(\varvec{x})\equiv \nabla _{\varvec{X}}\varvec{x}\) is the deformation gradient pertinent to a material point. Recall once more that Eq. (28) is the result of the physical principle of local mass conservation and geometry, i.e., nonlinear kinematics, and, as such, it holds for arbitrary deformations. If we insist on studying small deformations, we must replace Eq. (28) by:
Consequently, the argument now runs as follows: Once the linear strain \(\varvec{\epsilon }(\varvec{x})\) is known from a linear-elastic analysis based on the (static) balance of momentum in combination with Hooke’s law, during which the mass density is assumed to be spatially constant, the spatial distribution of the current mass density in the strained body can be calculated from Eq. (29). In other words, one does not solve a coupled problem and does not make use of the balances of mass and momentum simultaneously. Indeed, in our problem we calculate the strains or rather the displacements from Eqs. (23)–(27) after the current mass density in the body force has been replaced by a constant reference mass density, hence mimicking homogeneous initial conditions for the mass distribution of a terrestrial planet. For conciseness of this paper, the question as to how the current mass density will look like and how it compares with today’s knowledge of the inner mass distribution of Earth will be discussed elsewhere.Footnote 4
Third, the use of a constant reference mass density in linear elasticity turns into a very subtle point when applied to problems of self-gravity. Observe that in the current local balance of momentum the current mass density appears explicitly and linearly in three locations: (i) in the inertial term (not shown in Eq. (23), because we restrict ourselves to quasistatic conditions); (ii) in the product of the term for the body force density, and (iii) in the acceleration part of the body force density, if we consider the case of full self-gravitational interaction. The latter will be demonstrated explicitly in Subsection (A.2.1). Now recall once more that all of this is ignored in linear elasticity where the current mass density is simply replaced by a constant value \(\rho _0\), everywhere. We may rephrase it in the jargon of technical mechanics by saying that the forces are applied to the undeformed structure and a first order theory is used to calculate the resulting deformation. Thus we would like to reemphasize that the model “linear elasticity” is defined by three prerequisites (also see, for example, the beginning of Kienzler and Schröder (2009), namely, first, a linear relationship between stress and strain, second, strains and displacements to be small and, third, equilibrium of an undeformed element.
However, the use of linear elasticity in self-gravitational problems remains questionable. Indeed, we shall see that for certain celestial objects, in particular the Earth, the strains we are about to predict from the linear theory of elasticity can become very large. Probably the first to notice was A.E.H. Love after applying linear elasticity in the way defined above and discovering what is known as the Love radius, a radial transition point within a self-gravitating spherical body, where radial strains switch from compression to tension and, consequently, may result in damage of the body. Love muses in sudden attacks of self-doubt about his approach, namely in Love (1892), Article 127: “There is another difficulty in the application of the result [for the strains and for the breaking stress] to the case of the Earth. The necessary limitation to the mathematical theory is that the strain found from it must always be “small”. ...” and in Love (1927), Article 75: “The Earth is an example of a body which must be regarded as being in a state of initial stress, for the stress that must exist in the interior is much too great to permit of the calculation, by the ordinary methods, of strains reckoned from the unstressed state as unstrained state.”
Consequently, we could come to the conclusion to abandon linear elasticity completely and to use a deformation-wise nonlinear theory instead. Indeed, this was done in a series of papers from the school of Seth, who was one of the first to study and use nonlinear deformation measures for elasticity problems, see, e.g., Chattarji (1953) or Bose and Chattarji (1963). In principle, this requires solving the coupled problem, namely the balances of mass and momentum, unless an empirical expression for the (current) mass density distribution is assumed. The latter was the case in the aforementioned papers from the school of Seth. One of their main conclusions was that the position of the Love radius as predicted by linear elasticity at small deformations does not change much when switching to large deformation theory.
This in mind, do we now feel completely reconciled by using the linear theory elasticity in context with problems of self-gravity? The answer is unfortunately “no.” Indeed, a detailed study of the nonlinear problem shows that there are many open questions, ranging from numerical issues to the use of the proper nonlinear stress-strain relationship.Footnote 5 Nevertheless, this paper is not the place to explore this issue completely. We must and will assume the position of Galileo’s Simplicio, who would use the linear-elastic solution anyway, no matter how large the self-gravitating mass really is. To quote Churchill: “Now this is not the end. It is not even the beginning of the end. But it is, perhaps, the end of the beginning” or shall we say the dawn of awareness?
In the next section we shall briefly summarize Love’s linear elasticity results at small deformations and provide some additional comments for better explanation and clarification of the problem. For example we shall introduce and interpret various parameters in terms of their physical meaning, which can be used for normalization of the solution. Moreover, we will show that for certain celestial objects, such as Mercury, the linear elasticity solution with small deformations can be considered as valid. It will also serve as a starting point as well as for comparison with the results from linear viscoelasticity in Sect. 3.
1.2 A.2 Review of Love’s Linear-Elastic Model of Self-gravitation
1.2.1 A.2.1 Analysis of the Strictly Radially Symmetric Case
We start from the Poisson equation describing Newtonian gravity as shown in Eq. (24) and assume purely radial dependencies:
where m(r) denotes the total mass within a spherical region of radial extension r:
and \(r_\mathrm {o}\) stands for the current outer radius of the spherical body. Consequently, according to Eq. (24), under these circumstances the volume density of body force is given by:
This includes the well-known high school result according to which the gravitational force at a distance r within a homogeneous sphere is given by Newton’s law of gravity for point masses: The attracting mass is given by all the matter below the position r, i.e., m(r), and can be thought of as being concentrated in the origin of the sphere, i.e., \(r=0\). The to-be-attracted mass at the radial position r is given by \(\mathrm {d}m=\rho (r)\, \mathrm {d}V\), \(\mathrm {d}V\) being the corresponding volume element to be used for multiplication in Eq. (24). Moreover, the gravitational force is attractive, as indicated by the negative direction of the current radial unit vector, \(\varvec{e}_r\). It should be pointed out that in this equation the mass density within the sphere does not necessarily have to be homogeneous. Rather it can be a function of the current radius, \(\rho (r)\), and the high-school result still holds. This is very often not clearly stated in textbooks, especially if use of the Poisson equation is avoided for mathematical simplicity.
However, as outlined before, it is customary in linear elasticity to use the body force of an undeformed structure in Eq. (23). More specifically, we pretend everything is initially homogeneous and use a constant mass density, \(\rho _0\), such that:
Note that a two-step approximation was involved here. First, the current mass density, \(\rho (r)\), in Eq. (23) or in (32) was replaced by the reference mass density, \(\rho _0\). Second, no distinction is made between the current and the reference radius on the right hand side of Eq. (32). We will now use the approximation (33) in Eq. (23), which reads in spherical coordinates as follows:
Moreover, Hooke’s law reads in spherical coordinates as follows:
And finally the linear strain tensor is linked with spatial derivatives of the displacements by:
We now proceed to solve these equations. To this end we make use of the semi-inverse method. Because of symmetry it seems reasonable to seek for solutions with the following ansatz:
Consequently, we find for the linear strains:
where the dash refers to a differentiation w.r.t. r. Because of that Hooke’s law (35) reduces to:
Thus, the angular components of the balance of momentum shown in Eq. (34) are identically satisfied and the first one results in an ordinary differential equation of second order (a dash refers to differentiation with respect to the radius, r):
The general solution consists of the full solution to the homogeneous part and one particular solution of the inhomogeneous case. It reads with two constants of integration, A and B, respectively, as follows:
Two conditions are needed in order to determine the two constants of integration. First, we require that the solution does not become singular at \(r=0\) and, second, the traction must be continuous at the outer radius, \(r_\mathrm {o}\), of the sphere. Hence, \(\sigma _{rr}\big \vert _{r=r_\mathrm {o}}=0\), because the influence of the outer atmospheric pressure of roughly \(1 \mathrm {bar}\) is negligibly small when it comes to the deformation of a solid. With Eq. (39)\(_1\) we find that:
because \(\lambda =\tfrac{E\nu }{(1-2\nu )(1+\nu )}\) and \(\mu =\tfrac{E}{2(1+\nu )}\), E being Young’s modulus and \(\nu \) Poisson’s ratio, respectively. Hence the radial displacement reads:
For completeness, the nonvanishing stresses then follow from Eq. (39) as:
Note the common factor \(\tfrac{2\pi G\rho _0^2r_\mathrm {o}^2}{15}\) in front of all these expressions. On first glance it does not allow for an easy intuitive interpretation. However, on second thought, note that (within the approximations made) the total mass of the gravitating sphere, \(m_0\), the gravitational acceleration on its surface, g, and its surface area, \(A_\mathrm {o}\), are given by:
Hence, we may write the ominous factor as:
and interpret it, with the exception of the fraction \(\tfrac{3}{10}\), as an average “pressure,” namely the ratio between the “total gravitational force,” \(m_0g\), distributed over the total surface area, \(A_\mathrm {o}\).
1.2.2 A.2.2 Dimensionless Formulation
For a numerical analysis it is best to work with dimensionless quantities. Since the outer radius, \(r_\mathrm {o}\), is the only length parameter in the problem, there is no other choice for a dimensionless distance and a dimensionless displacement but to define:
This allows us to rewrite Eq. (43) as follows:
with two dimensionless factors:
because the bulk modulus is given by \(k=\frac{E}{3(1-2\nu )}\).
Whilst the appearance of \(\alpha \) is a straightforward consequence of Eq. (43) the need for \(\alpha _k\) must be explained. To this end note that the dimensionless expressions in the parentheses of Eq. (48) still contain Poisson’s ratio. However, Poisson’s ratio of a terrestrial planet is not an immediately accessible parameter. A homogenization technique has to be applied in order to find out which effective elastic parameters such an object has. On the other hand, if we evaluate the parentheses in this equation at the surface of the planet, i.e., at \(x=1\), we obtain twice the fraction \(\tfrac{1-\nu }{1+\nu }\). Hence Poisson’s ratio disappears completely in the expression for the normalized displacement if we use the dimensionless factor \(\alpha _k\). In this case one only needs to know the effective compressibility of the planet, a parameter that can vary within certain physically reasonable bounds. And what is more, since \(u(x=1)\) can be interpreted as an average strain characterizing the state of deformation of the planet, which we wish to access numerically, it is very useful to have one elastic parameter less to worry about. A final comment is in order in context with Eq. (48). It obviously provides a restriction to the size of \(\alpha \) so that small strain theory applies. However, as it was pointed out above, we will discuss this issue in detail in Müller and Weiss (2016) and not here.
Later we shall be interested in a strain-based failure criterion. Hence it is useful to know the strains explicitly:
We now turn to the stresses given by Eq. (44). Differently from the case of length related quantities there are various possibilities for normalization. First, as Eq. (44) suggestively seems to indicate, we can use the factor \(\tfrac{2\pi G\rho _0^2r_\mathrm {o}^2}{15}\), which we have interpreted as an “average gravitational pressure” before. However, alternatively, we may use combinations of (effective) elastic constants. There is \(\lambda +2\mu \), which is related to the velocity of P-waves \(\left( \mathrm {v}_\mathrm {P}=\sqrt{\tfrac{\lambda +2\mu }{\rho _0}}\right) \), and, hence, a physically accessible quantity. Moreover, we may turn to the compressibility k, which is a direct measure of the resistance of a planet’s response to its own self-gravity. However, in this paper we restrict ourselves for simplicity to the choice:
and obtain:
1.2.3 A.2.3 Numerical Evaluation and Graphical Representation
Figure 6 (left) illustrates the dependence of the normalized displacement, \(u\equiv \tfrac{u_r}{r_\mathrm {o}}\) per \(\alpha _k\), on \(x\equiv \tfrac{r}{r_\mathrm {o}}\) for three different choices of Poisson’s ratio, \(\nu =0\) (red), \(\nu =0.3\) (green), and \(\nu =0.5\) (blue). Note that, as it should be, the radial displacement is negative and that the curves show a minimum. Because of Eq. (36)\(_1\) we may interpret the slope of the curves as radial strain multiplied by \(\alpha _k\). Hence the only positive radial strains can be found to the right of the minimum. The transition point between positive and negative strains (see Fig. 6, right), identifiable by locating the minimum of the displacement, is a.k.a. the Love radius and given by:

Normalized displacement versus dimensionless radius (see text)
This result was first mentioned by Love in his books on linear elasticity, namely in Article 127 of Love (1892) and later in Article 98 of Love (1906) or Love (1927). An intuitive explanation for the necessity of its occurrence is as follows: Unlike a homogeneous, isotropic sphere subjected to a constant external pressure, the state of strain in our case is not homogeneous and not isotropic. We face a nonconstant “external hydrostatic pressure,” so-to-speak, given by an effective gravitational force depending linearly on the distance from the center. This in combination with Poisson’s effect, i.e., the ability of a radial strain “making up” for the lateral contractions, \(\epsilon _{\vartheta \vartheta }\) and \(\epsilon _{\varphi \varphi }\), which are purely compressive in nature everywhere: The contractive force is proportional to r, the stretching stress (compensation of the lateral contraction) is proportional to \(r^2\). Hence from some r onward the force is not strong enough for compression, resulting in a transition from the negative to the positive, in other words in the existence of a Love radius. In his later editions Love does no longer comment on the physical significance of his radius. However, the first edition makes it perfectly clear that he was aiming at a failure criterion, namely specifically at what is known today as maximum principal strain theory. Love realized that the angular strains are always negative, whereas the radial strains may become positive above the Love radius, cf. Eq. (50) and Fig. 6 (right), and he provided an expression for the maximum radial strain, which is the one at the surface:
According to Love the corresponding tensile breaking stress is then given by:

Normalized displacement versus dimensionless radius for Mercury and Earth (see text)
This is quite a daring concept, because a planet like Earth is heterogeneous, and surely not perfectly linear elastic, and the materials it is made of might not be susceptible to strain-based failure, and so on, and so on. But even if we accept his idea in principle, what is the proper Young’s modulus to be used for a heterogeneous object like Earth? On second glance, however, note that the factor \(\alpha \) also contains Young’s modulus in its denominator (cf. Eq. (49)\(_1\)) since \(\lambda +2\mu =\tfrac{(1-\nu )E}{(1-2\nu )(1+\nu )}\). Thus we do not need to know E but only Poisson’s ratio, \(\nu \), which runs within well-known bounds, namely \(0\le \nu \le 0.5\). Hence, we may rewrite Love’s result as follows:
If we assume Poisson’s ratio to be that of iron, \(\nu =0.3\), and the mean mass density of Earth \(\rho _0=5500\,\tfrac{\mathrm {kg}}{\mathrm {m}^3}\) together with its (average) outer radius \(r_\mathrm {o}=\mathrm {6370\,km}\), we obtain \(T_0>30{,}000\,\mathrm {MPa}\), which is a value for a breaking stress far beyond physical credibility. It may be for that reason that Love did not present his original idea in later editions of his book any more. Nevertheless, it is a fact that the quality of the radial strain changes when passing the Love radius and it remains to be seen if the breaking stress can be brought to physically reasonable values if a deformation-wise nonlinear theory is used.
Figure 7 shows a plot of Eq. (48)\(_1\) when data of Mercury (index M) and Earth (index E) were used for evaluation. Specifically we have values for the average mass densities of \(\rho _0^{\mathrm {E}}=5500\tfrac{\mathrm {kg}}{\mathrm {m}^3}\) and \(\rho _0^{\mathrm {M}}=5400\tfrac{\mathrm {kg}}{\mathrm {m}^3}\) and (average) outer radii of \(r_\mathrm {o}^{\mathrm {E}}=\mathrm {6370\,km}\) and \(r_\mathrm {o}^{\mathrm {M}}=\mathrm {2440\,km}\), respectively. For the elastic data we assume in both cases the values of iron, i.e., \(E=210\) GPa and \(\nu =0.3\). This leads to the red curve for Mercury and to the blue one for Earth. Consequently, the strains for Mercury are below two percent but the ones for Earth are huge and amount to a maximum of fourteen percent. Hence, one may question the validity of the use of linear elasticity in case of very large self-gravitating masses and turn to a nonlinear formulation instead. Indeed, this has been done by the Indian school of Seth, who was one of the pioneers in large strain measures. We will not discuss this in detail here and refer the interested reader to Chap. 3 of the upcoming publication by Müller and Weiss (2016).
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media Singapore
About this chapter
Cite this chapter
Müller, W.H., Vilchevskaya, E.N. (2016). A Closed-Form Solution for a Linear Viscoelastic Self-gravitating Sphere. In: Naumenko, K., Aßmus, M. (eds) Advanced Methods of Continuum Mechanics for Materials and Structures. Advanced Structured Materials, vol 60. Springer, Singapore. https://doi.org/10.1007/978-981-10-0959-4_5
Download citation
DOI: https://doi.org/10.1007/978-981-10-0959-4_5
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0958-7
Online ISBN: 978-981-10-0959-4
eBook Packages: EngineeringEngineering (R0)