
Abstract
We consider the Cosserat continuum in its finite strain setting and discuss the dislocation density tensor as a possible alternative curvature strain measure in three-dimensional Cosserat models and in Cosserat shell models. We establish a close relationship (one-to-one correspondence) between the new shell dislocation density tensor and the bending-curvature tensor of 6-parameter shells.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


1 Indroduction
The Cosserat-type theories have recently seen a tremendous renewed interest for their prospective applicability to model physical effects beyond the classical ones. These comprise notably the so-called size-effects (“smaller is stiffer”).
In a finite strain Cosserat-type framework, the group of proper rotations \(\mathrm {SO}(3)\) has a dominant place. The original idea of the Cosserat brothers (Cosserat and Cosserat 1909) to consider independent rotational degrees of freedom in addition to the macroscopic displacement was heavily motivated by their treatment of plate and shell theory. Indeed, in shell theory it is natural to attach a preferred orthogonal frame (triad) at any point of the surface, one vector of which is the normal to the midsurface, the other two vectors lying in the tangent plane. This is the notion of the “trièdre caché”. The idea to consider then an orthogonal frame which is not strictly linked to the surface, but constitutively coupled, leads to the notion of the “trièdre mobile”. And this then is already giving rise to a prototype Cosserat shell (6-parameter) theory. For an insightful review of various Cosserat-type shell models, we refer to Altenbach et al. (2010).
However, the Cosserat brothers have never proposed any more specific constitutive framework, apart from postulating euclidean invariance (frame-indifference) and hyperelasticity. For specific problems it is necessary to choose a constitutive framework and to determine certain strain and curvature measures. This task is still not conclusively done, see e.g. Pietraszkiewicz and Eremeyev (2009).
Among the existing models for Cosserat-type shells, we mention the theory of simple elastic shells (Altenbach and Zhilin 2004), which has been developed by Zhilin (1976, 2006) and Altenbach and Zhilin (1982, 1988). Later, this theory has been successfully applied to describe the mechanical behaviour of laminated, functionally graded, viscoelastic or porous plates in Altenbach (2000), Altenbach and Eremeyev (2008, 2009, 2010) and of multi-layered, orthotropic, thermoelastic shells in Bîrsan and Altenbach (2010, 2011), Bîrsan et al. (2013), Sadowski et al. (2015). Another remarkable approach is the general 6-parameter theory of elastic shells presented in Libai and Simmonds (1998), Chróścielewski et al. (2004), Eremeyev and Pietraszkiewicz (2004). Although the starting point is different, one can see that the kinematical structure of the nonlinear 6-parameter shell theory is identical to that of a Cosserat shell model, see also Bîrsan and Neff (2014a, b).
In this paper, we would like to draw attention to alternative curvature measures, motivated by dislocation theory, which can also profitably be used in the three-dimensional Cosserat model and the Cosserat shell model. The object of interest is Nye’s dislocation density tensor \(\,\mathrm {Curl}\,{{\varvec{P}}}\,\). Within the restriction to proper rotations it turns out that Nye’s tensor provides a complete control of all spatial derivatives of rotations (Neff and Münch 2008) and we rederive this property for micropolar continua using general curvilinear coordinates. Then, we focus on shell-curvature measures and define a new shell dislocation density tensor using the surface Curl operator. Then, we prove that a relation analogous to Nye’s formula holds also for Cosserat (6-parameter) shells.
The paper is structured as follows. In Sect. 2 we present the kinematics of a three-dimensional Cosserat continuum, as well as the appropriate strain measures and curvature strain measures, written in curvilinear coordinates. Here, we show the close relationship between the wryness tensor and the dislocation density tensor, including the corresponding Nye’s formula. In Sect. 3, we define the \(\,\mathrm {Curl}\,\) operator on surfaces and present several representations using surface curvilinear coordinates. These relations are then used in Sect. 4 to introduce the new shell dislocation density tensor and to investigate its relationship to the elastic shell bending-curvature tensor of 6-parameter shells.
2 Strain Measures of a Three-Dimensional Cosserat Model in Curvilinear Coordinates
Let  be a Cosserat elastic body which occupies in its reference (initial) configuration the domain \(\varOmega _\xi \subset \mathbb {R}^3\). A generic point of \(\varOmega _\xi \) will be denoted by \((\xi _1,\xi _2,\xi _3)\). The deformation of the Cosserat body is described by a vectorial map \({{\varvec{\varphi }}}_\xi \) and a microrotation tensor \({{\varvec{R}}}_\xi \,\),
be a Cosserat elastic body which occupies in its reference (initial) configuration the domain \(\varOmega _\xi \subset \mathbb {R}^3\). A generic point of \(\varOmega _\xi \) will be denoted by \((\xi _1,\xi _2,\xi _3)\). The deformation of the Cosserat body is described by a vectorial map \({{\varvec{\varphi }}}_\xi \) and a microrotation tensor \({{\varvec{R}}}_\xi \,\),
where \(\varOmega _c\,\) is the deformed (current) configuration. Let \((x_1,x_2,x_3)\) be some general curvilinear coordinates system on \(\varOmega _\xi \,\). Thus, we have a parametric representation \(\, {{\varvec{\varTheta }}}\,\) of the domain \(\,\varOmega _\xi \)
where \(\,\varOmega \subset \mathbb {R}^3\) is a bounded domain with Lipschitz boundary \(\partial \varOmega \). The covariant base vectors with respect to these curvilinear coordinates are denoted by \({{\varvec{g}}}_i\) and the contravariant base vectors by \({{\varvec{g}}}^j\) (\(i,j=1,2,3\)), i.e.
where \(\delta ^j_i\) is the Kronecker symbol. We employ the usual conventions for indices: the Latin indices \(i,j,k,\ldots \) range over the set \(\{1,2,3\}\), while the Greek indices \(\alpha ,\beta ,\gamma ,\ldots \) are confined to the range \(\{1,2\}\,\); the comma preceding an index i denotes partial derivatives with respect to \(x_i\,\); the Einstein summation convention over repeated indices is also used.
Introducing the deformation function \(\,{{\varvec{\varphi }}}\,\) by the composition
we can express the (elastic) deformation gradient \({{\varvec{F}}}\) as follows:
Using the direct tensor notation, we can write
where \(\,{{\varvec{e}}}_i\,\) are the unit vectors along the coordinate axes \(Ox_i\) in the parameter domain \(\,\varOmega \,\). Then, the deformation gradient can be expressed by

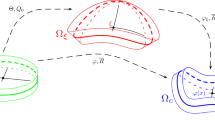
The reference (initial) configuration \(\varOmega _\xi \) of the Cosserat continuum, the deformed (current) configuration \(\varOmega _c\) and the parameter domain \(\varOmega \) of the curvilinear coordinates \((x_1,x_2,x_3)\). The triads of directors \(\{ {{\varvec{d}}}_i\}\) and \(\{ {{\varvec{d}}}^0_i\}\) satisfy the relations \({{\varvec{d}}}_i={{\varvec{Q}}}_e{{\varvec{d}}}_i^0= \overline{{{\varvec{R}}}}{{\varvec{e}}}_i\) and \( {{\varvec{d}}}_i^0= {{\varvec{Q}}}_0{{\varvec{e}}}_i\,\), where \({{\varvec{Q}}}_e\) is the elastic microrotation field, \({{\varvec{Q}}}_0\) the initial microrotation, and \(\overline{{{\varvec{R}}}}\) the total microrotation field
The orientation and rotation of points in Cosserat (micropolar) media can also be described by means of triads of orthonormal vectors (called directors) attached to every point. We denote by \(\{{{\varvec{d}}}_i^0 \}\) the triad of directors (\(i=1,2,3\)) in the reference configuration \(\,\varOmega _\xi \,\) and by \(\{{{\varvec{d}}}_i \}\) the directors in the deformed configuration \(\,\varOmega _c\,\), see Fig. 1. We introduce the elastic microrotation \({{\varvec{Q}}}_e\) as the composition
which can be characterized with the help of the directors by the relations
Let \({{\varvec{Q}}}_0\) be the initial microrotation (describing the position of the directors in the reference configuration \(\,\varOmega _\xi \))
Then, the total microrotation \(\overline{{{\varvec{R}}}}\) is given by
The non-symmetric Biot-type stretch tensor (the elastic first Cosserat deformation tensor, see Cosserat and Cosserat (1909), p. 123, Eq. (43)) is now
and the non-symmetric strain tensor for nonlinear micropolar materials is defined by
where \({{\varvec{1}}}_3= {{\varvec{g}}}_i\otimes {{\varvec{g}}}^i= {{\varvec{d}}}_i^0\otimes {{\varvec{d}}}_i^0\,\) is the unit three-dimensional tensor. As a strain measure for curvature (orientation change) one can employ the so-called wryness tensor \({{\varvec{\varGamma }}}\) given by:
where \(\mathrm {axl}\big ({{\varvec{A}}}\big )\) denotes the axial vector of any skew-symmetric tensor \({{\varvec{A}}}\). For a detailed discussion on various strain measures of nonlinear micropolar continua we refer to the paper Pietraszkiewicz and Eremeyev (2009).
As an alternative to the wryness tensor \(\,{{\varvec{\varGamma }}}\,\) one can make use of the \(\,\mathrm {Curl}\,\) operator to define the so-called dislocation density tensor \(\,\overline{{{\varvec{D}}}}_e\,\) by (Neff and Münch 2008)
which is another curvature measure for micropolar continua. Note that the \(\,\mathrm {Curl}\,\) operator has various definitions in the literature, but we will make its significance clear in the next Sect. 2.1, where we present the \(\,\mathrm {Curl}\,\) operator in curvilinear coordinates. The use of the dislocation density tensor \(\,\overline{{{\varvec{D}}}}_e\,\) instead of the wryness tensor in conjuction with micropolar and micromorphic media has several advantages, as it was shown in Ghiba et al. (2015), Neff et al. (2014), Madeo et al. (2015). The relationship between the wryness tensor \(\,{{\varvec{\varGamma }}}\,\) and the dislocation density tensor \(\,\overline{{{\varvec{D}}}}_e\,\) is discussed in Sect. 2.2 in details.
Using the strain and curvature tensors \((\overline{{{\varvec{E}}}}_e\,,\,\overline{{{\varvec{D}}}}_e)\) the elastically stored energy density W for the isotropic nonlinear Cosserat model can be expressed as (Neff et al. 2015; Lankeit et al. 2016)
where \(\mu \) is the shear modulus, \(\kappa \) is the bulk modulus of classical isotropic elasticity, and \(\,\mu _c\) is called the Cosserat couple modulus, which are assumed to satisfy
The parameter \(\,L_c\) introduces an internal length which is characteristic for the material, \(a_i>0\,\) are dimensionless constitutive coefficients and \(\,p\ge 2\,\) is a constant exponent. Here, \(\,\, \mathrm {dev}_3\,{{\varvec{X}}}:={{\varvec{X}}}-\frac{1}{3}\,( \mathrm {tr}\,{{\varvec{X}}})\,{{\varvec{1}}}_3\,\) is the deviatoric part of any second order tensor \({{\varvec{X}}}\).
Under these assumptions on the constitutive coefficients, the existence of minimizers to the corresponding minimization problem of the total energy functional has been shown, e.g. in Neff et al. (2015), Lankeit et al. (2016).
2.1 The Curl Operator
For a vector field \({{\varvec{v}}}\), the (coordinate-free) definition of the vector \(\mathrm {curl}\, {{\varvec{v}}}\) is
where \(\cdot \) denotes the scalar product and \(\times \) the vector product. The \(\mathrm {Curl}\) of a tensor field \(\,{{\varvec{T}}}\) is the tensor field defined by
Remark 22.1
The operator \(\mathrm {Curl}\,{{\varvec{T}}}\) given by (5) coincides with the \(\mathrm {Curl}\) operator defined in Svendsen (2002), Mielke and Müller (2006). However, for other authors the \(\mathrm {Curl}\) of \(\,{{\varvec{T}}}\) is the transpose of \(\mathrm {Curl}\,{{\varvec{T}}}\) defined by (5), see e.g. Gurtin (1981), Eremeyev et al. (2013).
Then, from (4) and (5) we obtain the following formulas
Indeed, the Definition (4) yields
and the Eq. (6)\(_1\) holds. Further, from (5) we get
so it follows \(\, \mathrm {Curl}\, {{\varvec{T}}}= \big ({{\varvec{g}}}^i \times {{\varvec{T}}}_{,i}^T \big )^T= - {{\varvec{T}}}_{,i}\times {{\varvec{g}}}^i\) and the relations (6) are proved.
In order to write the components of \(\mathrm {curl}\, {{\varvec{v}}}\) and \(\mathrm {Curl}\,{{\varvec{T}}}\) in curvilinear coordinates, we introduce the following notations
The alternating (Ricci) third-order tensor is
The covariant, contravariant, and mixed components of any vector field \({{\varvec{v}}}\) and any tensor field \(\,{{\varvec{T}}}\) are introduced by
For the partial derivatives with respect to \(x_i\) we have the well-known expressions
where a subscript bar preceding the index i denotes covariant derivative w.r.t. \(x_i\).
Using the relations (7) in (6), we can write the components of \(\mathrm {curl}\, {{\varvec{v}}}\) and \(\mathrm {Curl}\,{{\varvec{T}}}\) as follows
Indeed, from (6)\(_1\) and (7)\(_1\) we find
Analogously, from (6)\(_2\) and (7)\(_2\) we get
Thus, Eq. (8) is proved.
Remark 22.2
In the special case of Cartesian coordinates, the relations (6) and (8) admit the simple form
where \({{\varvec{v}}}=v_i{{\varvec{e}}}_i\) and \(\,{{\varvec{T}}}= T_{ij}{{\varvec{e}}}_i\otimes {{\varvec{e}}}_j\) are the corresponding coordinates. Moreover, in this case one can write
where \(\, {{\varvec{T}}}_i=T_{ij}\,{{\varvec{e}}}_j\) are the three rows of the \(3\times 3\) matrix \(\,\big ( T_{ij}\big )_{3\times 3}\,\). The relation (9) shows that \(\,\mathrm {Curl}\,\) is defined row-wise (Neff and Münch 2008): the rows of the \(3\times 3\) matrix \(\,\mathrm {Curl}\,{{\varvec{T}}}\,\) are, respectively, the three vectors \(\,\mathrm {curl}\big ({{\varvec{T}}}_i\big )\), \(i=1,2,3\).
Remark 22.3
In order to write the corresponding formula in curvilinear coordinates which is analogous to (9), we introduce the vectors \(\, {{\varvec{T}}}_i:=T_{ij}\,{{\varvec{g}}}^j\,\) and \(\, {{\varvec{T}}}^i:=T^{ij}\,{{\varvec{g}}}_j\,=T^i_{\cdot \, j}\,{{\varvec{g}}}^j \,\) such that it holds
If we differentiate (10)\(_1\) with respect to \(x_j\) we get
where \(\varGamma ^r_{ij}\) are the Christoffel symbols of the second kind. Hence, it follows
Taking the vector product of (11)\(_1\) with \({{\varvec{g}}}^j\) we obtain
The relation (12) is the analogue of (9) for curvilinear coordinates. Similarly, by differentiating (10)\(_2\) with respect to \(x_j\) one can obtain the relation
2.2 Relation Between the Wryness Tensor and the Dislocation Density Tensor
Let \({{\varvec{A}}}= A_{ij} {{\varvec{g}}}^i \otimes {{\varvec{g}}}^j\) be an arbitrary skew-symmetric tensor and \(\mathrm {axl}({{\varvec{A}}})=a_k{{\varvec{g}}}^k\) its axial vector. Then, the following relations hold
where the double dot product “:” of two tensors \({{\varvec{B}}}=B^{ijk}\,{{\varvec{g}}}_i\otimes {{\varvec{g}}}_j\otimes {{\varvec{g}}}_k\) and \({{\varvec{T}}}=T_{ij}\,{{\varvec{g}}}^i\otimes {{\varvec{g}}}^j\) is defined as \(\,{{\varvec{B}}}:{{\varvec{T}}}\,=\, B^{ijk}T_{jk}\,{{\varvec{g}}}_i\,\).
Using these relations, we can derive the close relationship between the wryness tensor and the dislocation density tensor: it holds
Indeed, in view of the Eq. (14)\(_3\) and the Definition (1) we have
Hence, we deduce
In view of (6)\(_2\) , the Definition (2) can be written in the form
Inserting (17) in (18), we obtain
Thus, the relation (15) is proved. If we apply the trace operator and the transpose in (15) we obtain also the relation (16). For infinitesimal strains this formula is well-known under the name Nye’s formula, and \((-\,{{\varvec{\varGamma }}})\) is also called Nye’s curvature tensor (Nye 1953). This relation has been first established in Neff and Münch (2008).
Let us find the components of the wryness tensor and the dislocation density tensor in curvilinear coordinates. To this aim, we write first the skew-symmetric tensor
Then, we obtain for the axial vector the equation
Indeed, according to (14)\(_2\) and (19) we can write
and the relation (20) is proved. Using (20) in the Definition (1) we find the following formula for the wryness tensor
To obtain an expression for the components of \(\overline{{{\varvec{D}}}}_e\) we insert (19) in (18) and we get
We rewrite the last vector product as
and we insert it in (22) to find the following expression for the dislocation density tensor
Remark 22.4
In the special case of Cartesian coordinates one can identify \({{\varvec{d}}}_i^0={{\varvec{e}}}_i,\,{{\varvec{g}}}^i={{\varvec{g}}}_i={{\varvec{e}}}_i\), and the relations (21) and (22) simplify to the forms
Remark 22.5
One can find various definitions of the wryness tensor in the literature, see e.g. Tambača and Velčić (2010), where \({{\varvec{\varGamma }}}\) is called the curvature strain tensor. Thus, one can alternatively define the wryness tensor by
where \({{\varvec{\omega }}}\) is the second order tensor given by
If we compare the Definition (1) with (24), (25), we see that indeed \({{\varvec{Q}}}_e^T\,{{\varvec{\omega }}}_i= \mathrm {axl}\big ({{\varvec{Q}}}_e^T{{\varvec{Q}}}_{e,i}\big )\), i.e.
By a straightforward but lengthy calculation, one can prove that the vectors \({{\varvec{\omega }}}_i\) are expressed in terms of the directors by
Inserting (27) in (25)\(_1\) and (24), we obtain the expression of the wryness tensor written with the help of the directors \({{\varvec{d}}}_i\)
3 The Curl Operator on Surfaces
Let \(\mathcal {S}\) be a smooth surface embedded in the Euclidean space \(\mathbb {R}^3\) and let \({{\varvec{y}}}_0(x_1,x_2)\), \({{\varvec{y}}}_0:\omega \rightarrow \mathbb {R}^3\), be a parametrization of this surface. We denote the covariant base vectors in the tangent plane by \({{\varvec{a}}}_1,{{\varvec{a}}}_2\) and the contravariant base vectors by \({{\varvec{a}}}^1,{{\varvec{a}}}^2\):
and let
where \({{\varvec{n}}}_0\) is the unit normal to the surface. Further, we designate by
and we have
where \(\epsilon ^{\alpha \beta } =\,\dfrac{1}{a}\,e_{\alpha \beta },\,\, \epsilon _{\alpha \beta } ={a}\,e_{\alpha \beta } \) and \(\,e_{\alpha \beta } \) is the two-dimensional alternator given by \(e_{12}=-e_{21}=1, \,e_{11}=e_{22}=0\).
Then, \({{\varvec{a}}}= a_{\alpha \beta }{{\varvec{a}}}^\alpha \otimes {{\varvec{a}}}^\beta = a^{\alpha \beta }{{\varvec{a}}}_\alpha \otimes {{\varvec{a}}}_\beta ={{\varvec{a}}}_\alpha \otimes {{\varvec{a}}}^\alpha \) represents the first fundamental tensor of the surface \(\mathcal {S}\), while the second fundamental tensor \({{\varvec{b}}}\) is defined by
The surface gradient \(\mathrm {Grad}_s\) and surface divergence \(\mathrm {Div}_s\) operators are defined for a vector field \({{\varvec{v}}}\) by
We also introduce the so-called alternator tensor \({{\varvec{c}}}\) of the surface (Zhilin 2006)
The tensors \({{\varvec{a}}}\) and \({{\varvec{b}}}\) are symmetric, while \({{\varvec{c}}}\) is skew-symmetric and satisfies \(\, {{\varvec{c}}}{{\varvec{c}}}=-{{\varvec{a}}}\). Note that the tensors \({{\varvec{a}}}\,\), \({{\varvec{b}}}\,\), and \({{\varvec{c}}}\) defined above are planar, i.e. they are tensors in the tangent plane of the surface. Moreover, \({{\varvec{a}}}\) is the identity tensor in the tangent plane.
We define the surface Curl operator \(\mathrm {curl}_s\) for vector fields \({{\varvec{v}}}\) and, respectively, \(\mathrm {Curl}_s\) for tensor fields \({{\varvec{T}}}\) by
Thus, \(\mathrm {curl}_s\,{{\varvec{v}}}\) is a vector field, while \(\mathrm {Curl}_s\,{{\varvec{T}}}\) is a tensor field.
Remark 22.6
These definitions are analogous to the corresponding Definitions (4), (5) in the three-dimensional case. Notice that the curl operator on surfaces has a different significance for other authors, see e.g. Backus et al. (1996).
From the Definitions (32) and (33) it follows
Indeed, in view of (30) and (32) we have
and also
which implies \( \mathrm {Curl}_s\,{{\varvec{T}}} = \big ({{\varvec{a}}}^\alpha \times {{\varvec{T}}}^T_{,\alpha }\big )^T = - {{\varvec{T}}}_{,\alpha }\times {{\varvec{a}}}^\alpha \), so the relations (34) hold true.
To write the components of \(\mathrm {curl}_s\,{{\varvec{v}}}\) and \(\mathrm {Curl}_s\,{{\varvec{T}}}\) we employ the covariant derivatives on the surface. Let \({{\varvec{v}}}= v_i\,{{\varvec{a}}}^i\) be a vector field on \(\mathcal {S}\). Then, we have
where \( v_{\beta |\alpha } = v_{\beta ,\alpha } - \varGamma ^\gamma _{\alpha \beta }\,v_\gamma \,\) is the covariant derivative with respect to \(x_\alpha \). Inserting this relation in (34)\(_1\) and using (29)\(_{1,2}\) we obtain
For a tensor field \({{\varvec{T}}}=T_{ij}\,{{\varvec{a}}}^i\otimes {{\varvec{a}}}^j = T^{ij}\,{{\varvec{a}}}_i\otimes {{\varvec{a}}}_j = T^{i}_{\cdot \,j}\,{{\varvec{a}}}_i\otimes {{\varvec{a}}}^j\) on the surface, the derivative \({{\varvec{T}}}_{,\gamma }\) can be expressed as
where the covariant derivatives are
Using (37) in (34)\(_2\) we obtain with the help of (29)\(_{1,2}\) the decomposition
Alternatively, one can use the mixed components \(T^{i}_{\cdot \,j}\,\) and write \(\mathrm {Curl}_s\,{{\varvec{T}}}\) in the tensor basis \(\{ \,{{\varvec{a}}}_i\otimes {{\varvec{a}}}_j \}\)
where
Remark 22.7
In order to obtain a formula analogous to (9) and (12), (13) for \( \mathrm {Curl}_s\,\) we write \({{\varvec{T}}}\) in the form
By differentiating the first equation with respect to \(x_\gamma \) we get
Taking the vector product with \({{\varvec{a}}}^\gamma \) and using (34)\(_2\) we find
with \(\,{{\varvec{T}}}_{\alpha | \gamma }\,:=\, {{\varvec{T}}}_{\alpha , \gamma } -\varGamma ^\beta _{\alpha \gamma }\,{{\varvec{T}}}_\beta \,\). Similarly, we obtain
with \(\,{{\varvec{T}}}^{\alpha }_{\,\cdot \, | \gamma }\,:=\, {{\varvec{T}}}^{\alpha }_{\,\cdot \, , \gamma } + \varGamma ^\alpha _{\beta \gamma }\,{{\varvec{T}}}^\beta \,\). The Eqs. (40) and (41) are the counterpart of the relations (12) and, respectively, (13) in the three-dimensional theory.
4 The Shell Dislocation Density Tensor
Let us present first the kinematics of Cosserat-type shells, which coincides with the kinematics of the 6-parameter shell model, see Chróścielewski et al. (2004), Eremeyev and Pietraszkiewicz (2006), Bîrsan and Neff (2014b).
We consider a deformable surface \(\omega _\xi \subset \mathbb {R}^3\) which is identified with the midsurface of the shell in its reference configuration and denote with \((\xi _1,\xi _2,\xi _3)\) a generic point of the surface. Each material point is assumed to have 6 degrees of freedom (3 for translations and 3 for rotations). Thus, the deformation of the Cosserat-type shell is determined by a vectorial map \({{\varvec{m}}}_\xi \) and the microrotation tensor \({{\varvec{R}}}_\xi \,\)
where \(\omega _c\) denotes the deformed (current) configuration of the surface. We consider a parametric representation \({{\varvec{y}}}_0\) of the reference configuration \(\omega _\xi \)
where \(\omega \subset \mathbb {R}^2\) is the bounded domain of variation (with Lipschitz boundary \(\partial \omega \)) of the parameters \((x_1,x_2)\). Using the same notations as in Sect. 3, we introduce the base vectors \({{\varvec{a}}}_i,\,{{\varvec{a}}}^j\) and the fundamental tensors \({{\varvec{a}}},\,{{\varvec{b}}}\) for the reference surface \(\omega _\xi \).
The deformation function \({{\varvec{m}}}\) is then defined by the composition
According to (30), the surface gradient of the deformation has the expression
As in the three-dimensional case (see Sect. 2) we define the elastic microrotation \({{\varvec{Q}}}_e\) by the composition
the total microrotation \(\overline{{{\varvec{R}}}}\) by
where \({{\varvec{Q}}}_0 :\omega \rightarrow \mathrm {SO}(3 )\) is the initial microrotation, which describes the orientation of points in the reference configuration.
To characterize the orientation and rotation of points in Cosserat-type shells, one employs (as in the three-dimensional case) a triad of orthonormal directors attached to each point. We denote by \({{\varvec{d}}}_i^0(x_1,x_2) \) the directors in the reference configuration \(\omega _\xi \) and by \({{\varvec{d}}}_i(x_1,x_2) \) the directors in the deformed configuration \(\omega _c\,\)(\(i=1,2,3\)). The domain \(\omega \) is referred to an orthogonal Cartesian frame \(Ox_1x_2x_3\) such that \(\omega \subset Ox_1x_2\,\) and let \({{\varvec{e}}}_i\,\) be the unit vectors along the coordinate axes \(Ox_i\,\). Then, the microrotation tensors can be expressed as follows
Remark 22.8
The initial directors \({{\varvec{d}}}_i^0\) are usually chosen such that
i.e. \({{\varvec{d}}}_3^0\) is orthogonal to \(\omega _\xi \) and \({{\varvec{d}}}_\alpha ^0\) belong to the tangent plane. This assumption is not necessary in general, but it will be adopted here since it simplifies many of the subsequent expressions. In the deformed configuration, the director \({{\varvec{d}}}_3\,\) is no longer orthogonal to the surface \(\omega _c\,\) (the Kirchhof–Love condition is not imposed). One convenient choice of the initial microrotation tensor \({{\varvec{Q}}}_0 = {{\varvec{d}}}_{i}^{0}\otimes {{\varvec{e}}}_i\,\) such that the conditions (44) be satisfied is \({{\varvec{Q}}}_0 = \mathrm {polar}\big ({{\varvec{a}}}_i\otimes {{\varvec{e}}}_i\big )\), as it was shown in Remark 10 of (Bîrsan and Neff 2014a).
Let us present next the shell strain and curvature measures. In the 6-parameter shell theory the elastic shell strain tensor \({{\varvec{E}}}_e\) is defined by (Chróścielewski et al. 2004, Eremeyev and Pietraszkiewicz 2006)
To write the components of \({{\varvec{E}}}_e\) we insert (42) and (43)\(_1\) into (45)
As a measure of orientation (curvature) change, the elastic shell bending-curvature tensor \({{\varvec{K}}}_e\) is defined by (Chróścielewski et al. 2004, Eremeyev and Pietraszkiewicz 2006, Bîrsan and Neff 2014b)
We remark the analogy to the Definition (1) of the wryness tensor \({{\varvec{\varGamma }}}\) in the three-dimensional theory. Following the analogy to (2), we employ next the surface curl operator \(\mathrm {Curl}_s\) defined in Sect. 3 to introduce the new shell dislocation density tensor \({{\varvec{D}}}_e\) by
In view of relation (34)\(_2\), we can write this definition in the form
The tensor \({{\varvec{D}}}_e\) given by (47) represents an alternative strain measure for orientation (curvature) change in Cosserat-type shells.
In what follows, we want to establish the relationship between the shell bending-curvature tensor \({{\varvec{K}}}_e\) and the shell dislocation density tensor \({{\varvec{D}}}_e\,\). We observe that this relationship is analogous to the corresponding relations (19), (20) in the three-dimensional theory. More precisely, in the shell theory it holds
To prove (49), we designate the components of the shell bending-curvature tensor by \({{\varvec{K}}}_e = K_{i\alpha }\,{{\varvec{d}}}_i^0\otimes {{\varvec{a}}}^\alpha \) and use (16)\(_3\) to write
which implies
We substitute the last relation into (48) and derive
which shows that (49)\(_1\) holds true. Applying the trace operator to Eq. (49)\(_1\) we get \(\mathrm {tr}\,{{\varvec{K}}}_e = \frac{1}{2}\, \mathrm {tr}\,{{\varvec{D}}}_e\,\). Inserting this into (49)\(_1\) we obtain (49)\(_2\,\). The proof is complete.
Remark 22.9
As a consequence of relations (49) we deduce the relations between the norms, traces, symmetric and skew-symmetric parts of the two tensors in the forms
Indeed the relations (50) can be easily proved if we apply the operators \(\mathrm {tr}\), \(\Vert \cdot \Vert \), \(\mathrm {skew}\), \(\mathrm {dev}_3\), and \(\mathrm {sym}\) to the Eq. (49)\(_1\,\). In view of (50)\(_1\,\) and \(\big ( \mathrm {tr}\,{{\varvec{K}}}_e\big )^2\le 3\,\Vert {{\varvec{K}}}_e \Vert ^2\), we obtain the estimate
In what follows, we write the components of the tensors \({{\varvec{K}}}_e\) and \({{\varvec{D}}}_e\,\). To this aim, we use the relations
which can be proved in the same way as Eq. (19). We compute the axial vector of the skew-symmetric tensor (52) and find (similar to (20))
By virtue of (53) the Definition (46) yields
which gives the components \(K_{i\alpha }\) of the shell bending-curvature tensor \({{\varvec{K}}}_e\) in the tensor basis \(\{ {{\varvec{d}}}_i^0\otimes {{\varvec{a}}}^\alpha \}\).
For the components of \({{\varvec{D}}}_e\), we insert the relation (52) in the Eq. (48)
Using that \(\,{{\varvec{d}}}_k^0 \times {{\varvec{a}}}^\alpha = {{\varvec{d}}}_k^0\times \big [\big ({{\varvec{a}}}^\alpha \!\cdot \!{{\varvec{d}}}^0_\beta \big )\, {{\varvec{d}}}^0_\beta \big ]= \big ({{\varvec{a}}}^\alpha \!\cdot \!{{\varvec{d}}}^0_\beta \big )\,e_{k\beta j}\,{{\varvec{d}}}_j^0\,\), we obtain
which shows the components of the shell dislocation density tensor in the tensor basis \(\{ {{\varvec{d}}}_i^0\otimes {{\varvec{d}}}_j^0 \}\).
5 Remarks and Discussion
Herein we present some other ways to express the shell dislocation density tensor, the shell bending-curvature tensor and discuss their close relationship.
Remark 22.10
It is sometimes useful to express the components of the shell dislocation density tensor \({{\varvec{D}}}_e\,\) in the tensor basis \(\{ {{\varvec{a}}}^i\otimes {{\varvec{a}}}_j \}\). If we multiply the relation (49)\(_2\) with \({{\varvec{n}}}_0\) and take into account that \({{\varvec{K}}}_e {{\varvec{n}}}_0 = {{\varvec{0}}}\), then we find \({{\varvec{0}}} = - {{\varvec{D}}}^T_e {{\varvec{n}}}_0 + \frac{1}{2}\,\big ( \mathrm {tr}\,{{\varvec{D}}}_e\big ){{\varvec{n}}}_0 \, \), which means
It follows that the components of \({{\varvec{D}}}_e\,\) in the directions \({{\varvec{n}}}_0\otimes {{\varvec{a}}}_\alpha \,\) are zero, i.e. \({{\varvec{D}}}_e\,\) has the structure
where \(\,{{\varvec{D}}}_\Vert = {{\varvec{D}}}_e\, {{\varvec{a}}} = D^{\alpha \beta }{{\varvec{a}}}_\alpha \otimes {{\varvec{a}}}_\beta = D_{\alpha \,\cdot }^{\,\,\,\,\beta }\,{{\varvec{a}}}^\alpha \otimes {{\varvec{a}}}_\beta \) is the planar part of \({{\varvec{D}}}_e\,\) (the part in the tangent plane). If we insert (56) into (49)\(_1\) and use \( \,\frac{1}{2}\, \mathrm {tr}\,{{\varvec{D}}}_e = \mathrm {tr}\,{{\varvec{K}}}_e\), we get
which implies (in view of (54)) that
where \(\,{{\varvec{K}}}_\Vert \,= {{\varvec{a}}}\,{{\varvec{K}}}_e\, = K_{\beta \alpha }{{\varvec{d}}}^0_\beta \otimes {{\varvec{a}}}^\alpha \) is the planar part of \({{\varvec{K}}}_e\).
Remark 22.11
We observe that between the planar part \(\,{{\varvec{D}}}_\Vert \,\) of \(\,{{\varvec{D}}}_e\,\) and the planar part \(\,{{\varvec{K}}}_\Vert \,\) of \(\,{{\varvec{K}}}_e\,\) there exists a special relationship. The tensor \(\,{{\varvec{D}}}_\Vert \,\) is the cofactor of the tensor \(\,{{\varvec{K}}}_\Vert \,\). Let us explain this in more details: for any planar tensor \( {{\varvec{S}}} = S^\alpha _{\,\cdot \,\beta }\,{{\varvec{a}}}_\alpha \otimes {{\varvec{a}}}^\beta \) we introduce the transformation
One can prove that this transformation has the properties
where the alternator \({{\varvec{c}}}\) is defined in (31). Moreover, in view of (59)\(_2\) and (31) we can write \( T( {{\varvec{S}}} )\) in the tensor basis \(\{ {{\varvec{a}}}^\alpha \otimes {{\varvec{a}}}_\beta \}\) as follows
which shows that the \(2\times 2\) matrix of the components of \(T({{\varvec{S}}})\) in the basis \(\{ {{\varvec{a}}}^\alpha \otimes {{\varvec{a}}}_\beta \}\) is the cofactor of the matrix of components of \({{\varvec{S}}}\) in the basis \(\{ {{\varvec{a}}}_\alpha \otimes {{\varvec{a}}}^\beta \}\), since
If the tensor \({{\varvec{S}}}\) is invertible, then from the Cayley–Hamilton relation \(\big ( {{\varvec{S}}}^T\big )^2 - \big ( \mathrm {tr}\,{{\varvec{S}}}\big ){{\varvec{S}}}^T + \mathrm {det} {{\varvec{S}}} = {{\varvec{0}}}\) and (58) we deduce
In our case, for the shell bending-curvature tensor \({{\varvec{K}}}_e\) we have \( \mathrm {tr}\, {{\varvec{K}}}_e = \mathrm {tr}\big ({{\varvec{a}}} {{\varvec{K}}}_e\big ) = \mathrm {tr}\big ( {{\varvec{K}}}_\Vert \big ) \), in view of (54). Then, the relation (57)\(_2\) yields
Using the relations (58)–(60) we see that \(\,{{\varvec{D}}}_\Vert \,\) is the image of \(\,{{\varvec{K}}}_\Vert \,\) under the transformation T, so that it holds
which expresses once again the close relationship between the shell dislocation density tensor \({{\varvec{D}}}_e\,\) and the shell bending-curvature tensor \({{\varvec{K}}}_e\).
Remark 22.12
The shell bending-curvature tensor \({{\varvec{K}}}_e\,\) can also be expressed in terms of the directors \({{\varvec{d}}}_i\,\). In this respect, an analogous relation to the formula (28) for the wryness tensor (see Remark 22.5) holds
To prove (63), we write the two terms in the brackets in the following form
and similarly
Inserting the last two relations into (63) we obtain
which holds true, by virtue of (54). Thus, (63) is proved.
We can put the relation (63) in the form
If we compare the relations (64) and the Definition (46), we derive
Then, from (16) we deduce \(\,\,\, {{\varvec{Q}}}_{e,\alpha } \,{{\varvec{Q}}}_e^T = {{\varvec{\omega }}}_\alpha \times {{\varvec{1}}}_3 \,\,\,\) and by multiplication with \(\,{{\varvec{Q}}}_e\,\) we find
Thus, the Eqs. (64), (65) can be employed for an alternative definition of the shell bending-curvature tensor, namely
This is the counterpart of the relations (24), (25) for the wryness tensor in the three-dimensional theory of Cosserat continua. The relations (67) were used to define the corresponding shell bending-curvature tensor, e.g. in Altenbach and Zhilin (2004), Zhilin (2006).
Remark 22.13
As shown by relations (3) for the three-dimensional case, one can introduce the elastically stored shell energy density W as a function of the shell strain tensor and the shell dislocation density tensor
If (68) is assumed to be a quadratic convex and coercive function, then the existence of solutions to the minimization problem of the total energy functional for Cosserat shells can be proved in a similar manner as in Theorem 6 of Bîrsan and Neff (2014a). In the proof, one should employ decisively the estimate (51) and the expressions of the shell dislocation density tensor \(\, {{\varvec{D}}}_e\,\) established in the previous sections.
References
Altenbach, H.: An alternative determination of transverse shear stiffnesses for sandwich and laminated plates. Int. J. Solids Struct. 37, 3503–3520 (2000)
Altenbach, H., Eremeyev, V.: Direct approach-based analysis of plates composed of functionally graded materials. Arch. Appl. Mech. 78, 775–794 (2008)
Altenbach, H., Eremeyev, V.: On the bending of viscoelastic plates made of polymer foams. Acta Mech. 204, 137–154 (2009)
Altenbach, H., Eremeyev, V.: On the effective stiffness of plates made of hyperelastic materials with initial stresses. Int. J. Non-Linear Mech. 45, 976–981 (2010)
Altenbach, H., Zhilin, P.: Eine nichtlineare Theorie dünner Dreischichtschalen und ihre Anwendung auf die Stabilitätsuntersuchung eines dreischichtigen Streifens. Technische Mechanik 3, 23–30 (1982)
Altenbach, H., Zhilin, P.: A general theory of elastic simple shells (in Russian). Uspekhi Mekhaniki 11, 107–148 (1988)
Altenbach, H., Zhilin, P.: The theory of simple elastic shells. In: Kienzler, R., Altenbach, H., Ott, I. (eds.) Theories of Plates and Shells. Critical Review and New Applications, Euromech Colloquium 444, pp. 1–12. Springer, Heidelberg (2004)
Altenbach, J., Altenbach, H., Eremeyev, V.: On generalized Cosserat-type theories of plates and shells: a short review and bibliography. Arch. Appl. Mech. 80, 73–92 (2010)
Backus, G., Parker, R., Constable, C.: Foundations of Geomagnetism. Cambridge University Press, Cambridge (1996)
Bîrsan, M., Altenbach, H.: A mathematical study of the linear theory for orthotropic elastic simple shells. Math. Methods Appl. Sci. 33, 1399–1413 (2010)
Bîrsan, M., Altenbach, H.: Analysis of the deformation of multi-layered orthotropic cylindrical elastic shells using the direct approach. In: Altenbach, H., Eremeyev, V. (eds.) Shell-like Structures: Non-classical Theories and Applications, pp. 29–52. Springer, Berlin (2011)
Bîrsan, M., Neff, P.: Existence of minimizers in the geometrically non-linear 6-parameter resultant shell theory with drilling rotations. Math. Mech. Solids 19(4), 376–397 (2014a)
Bîrsan, M., Neff, P.: Shells without drilling rotations: a representation theorem in the framework of the geometrically nonlinear 6-parameter resultant shell theory. Int. J. Eng. Sci. 80, 32–42 (2014b)
Bîrsan, M., Sadowski, T., Pietras, D.: Thermoelastic deformations of cylindrical multi-layered shells using a direct approach. J. Therm. Stress. 36, 749–789 (2013)
Chróścielewski, J., Makowski, J., Pietraszkiewicz, W.: Statics and Dynamics of Multifold Shells: Nonlinear Theory and Finite Element Method (in Polish). Wydawnictwo IPPT PAN, Warsaw (2004)
Cosserat, E., Cosserat, F.: Théorie des corps déformables. Hermann et Fils, Paris (1909) (Reprint 2009)
Eremeyev, V., Pietraszkiewicz, W.: The nonlinear theory of elastic shells with phase transitions. J. Elast. 74, 67–86 (2004)
Eremeyev, V., Pietraszkiewicz, W.: Local symmetry group in the general theory of elastic shells. J Elast. 85, 125–152 (2006)
Eremeyev, V., Lebedev, L., Altenbach, H.: Foundations of Micropolar Mechanics. Springer, Heidelberg (2013)
Ghiba, I., Neff, P., Madeo, A., Placidi, L., Rosi, G.: The relaxed linear micromorphic continuum: existence, uniqueness and continuous dependence in dynamics. Math. Mech. Solids 20, 1171–1197 (2015)
Gurtin, M.: An Introduction to Continuum Mechanics., Mathematics in Science and Engineering, vol. 158, 1st edn. Academic, London (1981)
Lankeit, J., Neff, P., Osterbrink, F.: Integrability conditions between the first and second cosserat deformation tensor in geometrically nonlinear micropolar models and existence of minimizers (2016). arXiv:150408003
Libai, A., Simmonds, J.: The Nonlinear Theory of Elastic Shells, 2nd edn. Cambridge University Press, Cambridge (1998)
Madeo, A., Neff, P., Ghiba, I., Placidi, L., Rosi, G.: Wave propagation in relaxed linear micromorphic continua: modelling metamaterials with frequency band gaps. Contin. Mech. Thermodyn. 27, 551–570 (2015)
Mielke, A., Müller, S.: Lower semi-continuity and existence of minimizers in incremental finite-strain elastoplasticity. Z. Angew. Math. Mech. 86, 233–250 (2006)
Neff, P., Münch, I.: Curl bounds Grad on \({\rm {SO}}(3)\). ESAIM: Control, Optim. Calc. Var. 14, 148–159 (2008)
Neff, P., Ghiba, I., Madeo, A., Placidi, L., Rosi, G.: A unifying perspective: the relaxed linear micromorphic continua. Contin. Mech. Thermodyn. 26, 639–681 (2014)
Neff, P., Bîrsan, M., Osterbrink, F.: Existence theorem for geometrically nonlinear Cosserat micropolar model under uniform convexity requirements. J. Elast. 121, 119–141 (2015)
Nye, J.: Some geometrical relations in dislocated crystals. Acta Metall. 1, 153–162 (1953)
Pietraszkiewicz, W., Eremeyev, V.: On natural strain measures of the non-linear micropolar continuum. Int. J. Solids Struct. 46, 774–787 (2009)
Sadowski, T., Bîrsan, M., Pietras, D.: Multilayered and FGM structural elements under mechanical and thermal loads. Part I: comparison of finite elements and analytical models. Arch. Civ. Mech. Eng. 15, 1180–1192 (2015)
Svendsen, B.: Continuum thermodynamic models for crystal plasticity including the effects of geometrically necessary dislocations. J. Mech. Phys. Solids 50(25), 1297–1329 (2002)
Tambača, J., Velčić, I.: Existence theorem for nonlinear micropolar elasticity. ESAIM: Control, Optim. Calc. Var. 16, 92–110 (2010)
Zhilin, P.: Mechanics of deformable directed surfaces. Int. J. Solids Struct. 12, 635–648 (1976)
Zhilin, P.: Applied Mechanics—Foundations of Shell Theory (in Russian). State Polytechnical University Publisher, Sankt Petersburg (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media Singapore
About this chapter
Cite this chapter
Bîrsan, M., Neff, P. (2016). On the Dislocation Density Tensor in the Cosserat Theory of Elastic Shells. In: Naumenko, K., Aßmus, M. (eds) Advanced Methods of Continuum Mechanics for Materials and Structures. Advanced Structured Materials, vol 60. Springer, Singapore. https://doi.org/10.1007/978-981-10-0959-4_22
Download citation
DOI: https://doi.org/10.1007/978-981-10-0959-4_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0958-7
Online ISBN: 978-981-10-0959-4
eBook Packages: EngineeringEngineering (R0)