
Abstract
This contribution focuses on the performance of multi-GNSS precise point positioning (PPP) with iGMAS products. Daily GNSS measurements from 50 stations observed during one hundred days in 2015 are used, the convergence time and positioning accuracy are investigated. As a comparison, the same processing is employed by using GBM products provided by GFZ. The results show that: (1) Compared to GPS-only PPP, multi-GNSS PPP has a great improvement in convergence time, while it is not significant for positioning accuracy. In detail, the averaged convergence time of GPS/BDS PPP is reduced by 14.6 %, and 28.86 % for GPS/GLONASS PPP; the GPS/BDS/GLONASS PPP can further decrease the convergence time, but no obvious improvement is found in four-constellation (GPS/BDS/GLONASS/GALILEO) PPP, compared with GPS/BDS/GLONASS PPP, due to the limited number of GALILEO satellites. As to the positioning accuracy, they are in the same level after the initialization. (2) Using the same observation data, the final position accuracy of both the multi-constellation PPP using iGMAS products and that using GBM products could reach millimeter level in the horizontal, while the convergence time of iGMAS products is relatively slow. Analysis of statistical results shows that the accuracy of positioning is reliable, which could further prove the stability and reliability of iGMAS products.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Precise point positioning (PPP) is the technology which uses a single dual-frequency GNSS receiver to receive the pseudorange and carrier-phase observations, and the precise orbit and clock products provided by IGS to achieve high-precision absolute positioning. The accuracy of PPP results can be in the millimeter level, and the height accuracy could reach the centimeter level. After years of development, the theory of GPS PPP has been quite mature, and has been widely used in scientific research and industrial applications. Since 2007, with the establishment and development of the four navigation systems, multi-constellation PPP becomes feasible [1–4]. The combination of several navigation systems could greatly improve the satellite’s geometric graphics intensity, and significantly increase the positioning accuracy and reduce the convergence time. China’s BeiDou navigation system (BDS) began to provide positioning services in December 7, 2012, and plans to provide global navigation services in 2020. The convergence time and positioning accuracy of different constellation combinations are analyzed in this paper [4], including the BeiDou-only PPP which has poorer accuracy than the GPS-only PPP. But GPS/BeiDou significantly improves the positioning accuracy by 28, 6, and 7 % in the east, north, and up components in terms of the RMS statistics, respectively, and the convergence time reduces for 26, 13, and 14 %, respectively. The GPS/GLONASS PPP achieves slightly better positioning accuracy than the GPS/BDS PPP. The triple-constellation PPP further increases the positioning accuracy and decreases the convergence time over the dual-constellation PPP. While, for the limited number of Galileo satellites, in the multi-constellation PPP, its effect on the convergence time and positioning accuracy is not obvious. In this study, the multi-constellation PPP model is developed and its performance is assessed in terms of positioning accuracy and convergence time through static tests by using iGMAS products [5] and the stability of iGMAS products is analyzed.
The main work includes two aspects. One is to develop multi-constellation PPP model and processing method. The second aspect is the comparison of the precision positioning results of iGMAS products and GBM products and analysis on the stability of products.
2 PPP Model with Multi-constellation
The pseudorange and carrier-phase observations can be expressed as:
where the superscript s represents a GNSS satellite, P s j is code observations on the jth frequency, \(\varPhi_{j}^{s}\) is carrier observations on the jth frequency, ρ is the geometric distance, c is the speed of light, δt is the receiver clock biases, δt s is the satellite clock biases, \(d_{trop}^{s}\) is the tropospheric delay in meters, \(I_{j}^{s}\) is the ionospheric delay at jth frequency, the effect of the ionospheric delay on different frequency observations has the following relations: \(I_{j}^{s} = (\lambda_{j}^{2} /\lambda_{k}^{2} )I_{k}^{s}\), where j, k is the jth or kth frequency, d r and \(d_{i}^{s}\) are receiver and satellite terminal hardware delay deviation, λ j is the wavelength of carrier phase on the jth frequency, N j is the float ambiguity on the jth frequency.
Using dual-frequency pseudorange and carrier-phase observations of ionosphere-free positioning model, the expression is as follows:
where P IF is ionosphere-free code observation, Φ IF is the ionosphere -free carrier-phase observable, f 1 and f 2 are two carrier-phase frequencies in Hertz.
Multi-constellation GNSS combination can accelerate the convergence rate, improve the positioning accuracy in harsh observation environment, and improve the performance of navigation and positioning, but there is also a problem of compatibility between different systems. These compatibility problems, are mainly caused by the benchmark differences, mainly exist in different navigation systems and the difference of the signal system, the difference of spatial datum is resolved by the orbit of GNSS products, the key problem is to deal with the time difference between different navigation systems. So, if the GPS system time is chosen as the reference time scale, the quad-constellation PPP observation equations may be expressed as follows:
where dt sys is the time difference between GPS and different systems, N and N o are the parameters of the float ambiguity after being redefined, ε P and ε Φ include noise and other measurement error, ρ is the geometric range in meters, c is the speed of light, g refers to GPS, and o refers to other navigation system.
3 Data Description
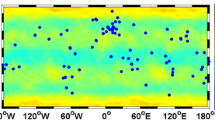
The data used are collected at fifty IGS stations on 100 days, from June 17, 2015 to October 10, 2015. As iGMAS products in the above time period has a partial loss, the experiment only tests 100 days of observation data. All stations can receive observations from GPS, BDS, GLONASS, and Galileo constellations. Observations have a sampling interval of 30 s, the orbit and clock biases of GBM products have a sampling interval of 15 min and 30 s, respectively, the orbit and clock biases of iGMAS products have a sampling interval of 15 min and 5 min, respectively. The “igs08_1861. Atx” file data generated and released by IGS are used to correct the GPS and GLONASS satellite phase center offset (PCO). The BeiDou and Galileo antenna offsets recommended by the MGEX (The Multi-GNSS Experiment) project are used to correct the PCOs of BeiDou and Galileo satellites [4, 6]. The Kalman filter algorithm is applied in the multi-constellation PPP model. The GPS and GLONASS code observation precision is set to be 0.3 m. The GPS and GLONAS phase observation precision is set to be 0.003 m. The BeiDou and Galileo code observation precision is set to be 0.6 m and the phase observation precision is set to be 0.004 m. The accuracy of orbit provided by iGMAS about GEO satellites and IGSO/MEO satellites is 400 and 15 cm, respectively, so the weight of the GEO satellites is decreased 30 times.
4 Analysis of Positioning Results
The static processing of quad-constellation PPP is carried out by using iGMAS products, and mainly analyzes five different constellation combinations, which are GPS-only, GPS/BDS, GPS/GLONASS, GPS/GLONASS/BDS, and GPS/GLONASS/BDS/Galileo. In the study, the position filter is considered to have converged when the positioning errors reach ±0.1 m and remain within ±0.1 m. And the convergence time is the period from the first epoch to the converged epoch. Figure 1 represents the PPP positioning errors which are based on five processing cases. Among it, G, C, R, and E represent GPS, BeiDou, GLONASS, and Galileo, respectively, the same below. It is obvious that double-constellation PPP positioning results are better than GPS-only PPP. The GPS/BDS PPP has achieved better convergence performance than GPS-only PPP, compared with the GPS/BDS PPP, the GPS/GLONASS PPP has achieved slightly better convergence performance. The GPS/GLONASS/BDS PPP results are extremely similar to those of GPS/GLONASS PPP, and the quad-constellation PPP results are not significantly improved.

PPP positioning errors at REYK for five different processing cases
Figure 2 shows the number of available satellite and PDOP (position dilution of precision) for five processing cases. There are less available GPS satellites for GPS-only, and the PODP value is relatively big. The dual-constellation combination increases the number of visible satellites and reduces the PDOP value. From dual constellation to triple constellation, along with the increase of the number of satellites, PDOP value decreases obviously and the PDOP value of quad-constellation combination is similar to the triple-constellation combination. From this, one can draw the conclusion that multi-constellation PPP can improve the structure of the satellite geometry and increase the number of satellites. Figure 3 shows the distributions of convergence time for five combination PPP models by using iGMAS products and GBM products, respectively, whose datasets are collected at fifty stations over one hundred days. It can be seen that the average convergence times of GPS-only PPP, GPS/BDS PPP, GPS/GLONASS PPP, and GPS/BDS/GLONASS PPP are 40.2, 34.3, 28.6, and 28.1 min, respectively. One can draw the conclusion that multi-constellation PPP can decrease convergence time.

Satellite of number and PDOP at REYK

Distributions of convergence time for five combination PPP models using datasets collected at fifty stations over one hundred days
In the paper [7], as long as the prior information of coordinates is accurate enough, the position filter can be converged within a single epoch. The main reason for why multi-constellation could accelerate convergence includes the following three aspects:
-
More satellites can be observed by multi-constellation PPP, thus the accuracy of initial results could be improved.
-
Multi-constellation PPP can improve the structure of the satellite geometry, which would accelerate the convergence of parameters to be evaluated [7].
-
Table 1 provides comparison of multi-constellation PPP model, where m, n, p, and q refer to GPS, BDS, GLONASS, and Galileo, respectively. Compared with single GPS-only PPP, multi-constellation PPP has higher redundancy, therefore multi-constellation PPP can accelerate the convergence of the parameters to be evaluated.
Table 1 Comparison of multi-constellation PPP model
5 Comparative Analysis of Positioning Results
iGMAS products are analyzed and compared with GBM products from the aspects of positioning accuracy, the convergence time, the tropospheric delay, and the receiver clock biases. Table 2 provides the RMS (root mean square) statistics in the north (N), east (E), and up (U) coordinate components to demonstrate a static positioning accuracy. The RMS computations are based on the average of position solution errors of the last 20 min during one hundred days. Compared with the multi-constellation PPP results obtained by using GBM products, those obtained by using iGMAS products achieve the same positioning accuracy. But the convergence time is relatively slow. Figure 3 shows that the convergence time of several combined positioning is slower than that of GBM for 2.1, 1.1, 3.5, 4.7, and 4.8 min.
Figures 4 and 5 provide troposphere solutions and the difference of receiver clock biases which are calculated by using iGMAS products and GBM products, respectively. The troposphere is basically the same, the difference is in the millimeter level. The difference of the receiver clock biases is less than 10 ns, which is due to the difference between two clock references. Figure 6 provides the statistical results of the RMS in the three-dimensional position, Fig. 7 provides the RMS in the east, north, and up coordinate using 100 days datasets at CUT0. Analyzing Fig. 6, the average RMS values of the three-dimensional position of the two products are 0.059 and 0.0601 cm. One can draw the conclusion that the positioning accuracy of iGMAS products is quite similar to that of GBM products. Analyzing Fig. 7, compared to results calculated by the GBM product, part of the RMS values of solutions calculated by iGMAS product in the NEU three directions are big, while are stable on the whole. It can be concluded that iGMAS products are reliable in positioning accuracy and stability of products.

Troposphere solutions

Difference of receiver clock biases

Distributions of RMS for the three-dimension using 100 days datasets at 50 stations

The RMS in the east, north, and up coordinate using 100 days datasets at CUT0
6 Conclusions
With the accuracy of BeiDou and Galileo satellite orbit and clock increasing, the results of the multi-constellation PPP are slightly better than GPS-only PPP and dual-constellation PPP. This article focuses on the accuracy of positioning, convergence time, and the stability of products by using iGMAS products. The GPS/BDS PPP reduces the convergence time by 14.6 % over the GPS-only cases. The GPS/GLONASS PPP decreases the convergence time by 28.86 % over the GPS-only PPP. In the triple-constellation PPP, the convergence time is further reduced by 30.1 %. Because the number of Galileo available satellite is extremely small, so the results of quad-constellation PPP are similar to those of triple-constellation PPP. Compared with the convergence time through using GBM products, the average convergence times of five combination model PPP positionings are 1.1 min, 2.1 min, 3.5 min, 4.7 min, and 4.8 min slow, respectively. The reason why multi-constellation PPP could accelerate the convergence mainly consists of three aspects: (1) it can provide more accurate initial value; (2) it can improve satellite spatial structure; (3) it has higher redundancy, which can accelerate the convergence of parameters to be evaluated. The accuracy of horizontal to be positioned by iGMAS and GBM products could reach millimeter to centimeter level, and the height accuracy is centimeter level, collect single-day solutions at 50 stations and for 100 days, the average RMS values of the three-dimensional position of the two products are 0.059 and 0.0601 cm, respectively. The difference of troposphere average is at millimeter level, and the clock biases difference is less than 10 ns. The 100 test results could show the stability of positioning accuracy, and remain at 0.0212, 0.0217 and 0.0355 m at the three directions of NEU, this illustrates the reliable stability of iGMAS products, and thus it is reliable to use iGMAS products.
References
Li X, Ge M, Dai X et al (2015) Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geodesy 89(6):607–635
Li X, Zhang X, Ren X et al (2015) Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Scientific reports, p 5
Li P, Zhang X (2014) Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solutions 18(3):461–471
Cai C, Gao Y, Pan L et al (2015) Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv Space Res 56(1):133–143
Cai H, Chen K, Xu T et al (2015) The iGMAS combined products and the analysis of their consistency. In: China satellite navigation conference (CSNC) 2015 proceedings: volume III. Springer, Berlin, pp 213–226
Rizos C, Montenbruck O, Weber R, et al. (2013) The IGS MGEX experiment as a milestone for a comprehensive multi-GNSSservice. In: Proceedings of ION PNT
Song C (2015) Technologies and methods on rapid convergence of precise point positioning. The PLA Information Engineering University
Acknowledgments
This work is supported by the Open Fund of Key Laboratory of Precision Navigation and Timing Technology, National Time Service Center, CAS(No. 2014PNTT06), National Natural Science Foundation of China (No. 41104021) and National Natural Science Foundation of China (No. 11173026). The authors gratefully acknowledge iGMAS and GFZ for providing products and are really grateful for data from MGEX.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media Singapore
About this paper
Cite this paper
Ge, Y., Sun, B., Wang, S., Shen, P., Liu, J. (2016). Convergence Time Analysis of Multi-constellation Precise Point Positioning Based on iGMAS Products. In: Sun, J., Liu, J., Fan, S., Wang, F. (eds) China Satellite Navigation Conference (CSNC) 2016 Proceedings: Volume III. Lecture Notes in Electrical Engineering, vol 390. Springer, Singapore. https://doi.org/10.1007/978-981-10-0940-2_26
Download citation
DOI: https://doi.org/10.1007/978-981-10-0940-2_26
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0939-6
Online ISBN: 978-981-10-0940-2
eBook Packages: EngineeringEngineering (R0)