
Abstract
Historically, the management of inputs to crop production, especially seed, on agricultural lands has been controlled by humans using “field-average” practices. This chapter presents an overview of technology, available today and in the near term, that is altering the accuracy and precision of seed singulation and placement during planting. Increasingly, the cost of genetically modified organisms (GMOs) and biological and chemical seed treatments demands high-level accuracy and precision in seeding operations. Alternately, when it is impractical to singulate individual seeds because of seed size or shape, producers may choose to overseed a crop and then thin the resulting stand to achieve an optimal stand. In either event several enabling technologies are available to enhance the likelihood of success. Characteristics of the precision planting systems (tractor and planter combination) of the future will change in three key areas, including (1) precision seed meters and methodologies that deliver and position seed within the furrow, (2) individual row stepper motor drives that index seed placement in accordance with distance traveled, and (3) seed metering capabilities that support seeding of multiple varieties/hybrids within one field.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Global Position System
- Global Navigation Satellite System
- Global Navigation Satellite System
- Pulse Width Modulation
- Global Position System Receiver
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Historically, the management of inputs to crop production, especially seed, on agricultural lands has been controlled by humans using “field-average” practices. While most producers recognize that variability exists in seed supplies and seeding techniques, the tools to address this variability were lacking. The development of spatial management technologies such as the Global Navigation Satellite System (GNSS), geographic information system (GIS), and controller area networks (CAN) now permits agricultural resource management decisions to be made with greater specificity, precision, and accuracy. Site-specific management has been around for many years, but it was the tools developed in the 1980s and 1990s that have allowed this management method to grow in popularity and be extended to other areas of agricultural production. An important outcome is the opportunity to manage variability within a production unit of land at increasingly finer resolution when compared with the “field-average” approaches of the past. However, site-specific management is currently limited by the ability of existing equipment to physically implement specific input management strategies. For example, pneumatic seed meters are susceptible to a number of distribution and control errors which compromise their ability to effectively establish uniform plant stands in accordance with local soil conditions and seed lot variability.
2 The Evolution of Technology
At the turn of the previous century, the introduction of the farm tractor, the replacement for animal power, was met with skepticism. The principal argument of the day was whether or not agricultural producers could afford to own this new technology. Most producers realized that a significant amount of time and land resources were dedicated to caring for animal power sources. The internal combustion engine, an alternative power source, freed producers to concentrate on crop production and to be timely in the completion of field activities. The downside was that most farming operations became more capital intensive. However, the mechanization of agriculture freed the rural labor force to move to manufacturing-based careers in the cities thereby fueling the industrial revolution.
Today, with the advent of the semiconductor and associated development of embedded controls and sensing technologies, we see a continuing focus by agricultural equipment manufacturers on removing the human operator from the control loop. With the continuing development of the Global Navigation Satellite System (GNSS), a ubiquitous and affordable radio-navigation facility, we can now track and control field machinery operation to within centimeter-level accuracy and precision for horizontal positioning nearly anywhere on the surface of the earth. It is the marriage of our ability to precisely control the timing, rate, and placement of production inputs with the enhanced genetic potential of GMO crops that allows us to achieve production increases never thought possible. Increasingly, management of seed at planting is an important key to unlocking the genetic potential of the crop.
While the title of this chapter is Precision Planting and Crop Thinning, what most producers are after is stand establishment – knowing that they will have a spatial distribution of viable plants that does not compromise the yield potential of the crop. Stand establishment can be viewed from two perspectives: (1) precision planting of viable seeds or (2) overseeding with precision thinning (plant removal) to achieve the desired stand. With the first case the producer must have confidence in the quality of the seed and their ability to singulate, control spacing, and establish good seed-soil contact at an appropriate planting depth. Alternately, the seed can be metered at rates in excess of the desired stand and then thinned after the seed has germinated and the viability of the resulting plants has been established. The trade-off is cost – lost yield potential when the desired stand is not achieved versus additional seed and field operations. In either case seed placement and ensuring good seed-soil contact are essential elements of precision planting.
3 Seed Biology and Physical Properties
Critical to the success of any seeding mechanism is a fundamental understanding of seed biology and the physical factors important to successful germination. To begin one must develop a definition of germination which serves the purpose of the equipment designer. However, the definition of germination varies depending on the perspective of the agricultural professional. For example, the seed physiologist identifies seed germination as the “emergence of the radicle through the seed coat.” Unfortunately, this definition falls short as it does not address the number of viable seedlings. On the other end of the spectrum, germination can be defined as the “emergence and development of a seed embryo… indicative of the capacity to produce a normal plant under favorable growing conditions.” For equipment designers and end users, the latter seems to be a more practical definition in that it helps to better define success when it comes to seeding practices.
From McDonald (2008) we learn that two types of germination morphology are possible. In the first case (epigeal) the cotyledons emerge from the ground attached to the hypocotyls (e.g., beans). During emergence the rapidly elongating hypocotyls are arched providing the necessary forces to break through the soil crust. Alternately, for hypogeal germination, the cotyledons remain in the soil. For the latter case the epicotyl is the rapidly elongating structure that breaks through the soil crust (e.g., maize). In either case the cotyledons, or comparable storage structures, provide the energy to sustain plant emergence from the ground.
Once placed in the ground, seed requires an appropriate physical environment to promote germination (i.e., appropriate moisture, temperature, and gas levels). Moisture is essential to initiate metabolic activity in support of germination. Further, there is a critical moisture content level required for germination (e.g., 30 % for corn and 50 % for soybeans). Similarly, O2 and CO2 gas levels in the soil impact germination. Threshold levels of O2 are required to initiate germination while elevated levels of CO2 tend to retard germinations. As one might suspect soil bulk density becomes an important factor when considering the balance of moisture and gas required in support of germination. Temperature too plays a significant role in the promotion of germination. Typically, the optimal temperature is dependent on species and cultivars or hybrids. In general, optimal germination temperatures, or temperatures promoting the highest percentage of germination in a short period of time, range between 15 and 30 °C. Lower temperatures tend to slow the process while high temperatures can cause denaturation of proteins required for germination. In general higher-quality seed germinates over a wider range of temperatures.
Now that some ground rules have been established for favorable germination conditions, it is appropriate to explore a few additional considerations when looking at the seed-soil environment. Water uptake by the seed is typically referred to as imbibition. Good seed to soil contact as well as available soil moisture are essential for good stand establishment. Many factors affect the rate at which this process proceeds. These factors include seed coat permeability, seed composition, and soil moisture level. Above all, the most important controllable factor in seeding relative to moisture imbibition is seed-soil contact. Seed treatments (surface roughness) and seed size affect imbibition and can be altered to some extent. Alternately, furrow opening and closing, seed delivery, and soil tilth can be controlled, to some extent, by proper selection of cultural practices at planting. For example, extensive tillage prior to seeding may produce more uniform seed emergence when contrasted with no-till or conservation tillage practices.
4 Precision Seed Meters
Extended discussions of the development of precision seed meters are provided by Srivastava et al. (2006) and Heege and Billot (1999). These resources provide significant background and details of traditional seeding equipment for broad acre crops, including a typical pneumatic meter marketed in North America for row crops (Fig. 6.1). Unfortunately, the same resources are not available for vegetable and specialty crop seeding equipment. One of the better resources on modern seeding equipment for these crops is provided by Sanders (1997). In this extension outreach publication, the author overviews several seed metering devices. Three noteworthy devices, and a short description of each, follow:

Seed meter sketch from US Patent No. 8375873 “Seed Metering Device for Agricultural Seeder”
-
Grooved Cylinder Style (Gramore) – This device requires round seed or coated seed that is made round. Seeds fall from a supply tube into a slot in a metal cylinder. The cylinder turns slowly and the seed drops out the diagonal slot at the bottom of the case. This meter has significant limitations and in general is not used with seed larger than peppers.
-
Belt-Type Style (Stan hay) – Circular holes are punched in a continuous belt at specified intervals. Seed is delivered by passing the belt through the seed mass to fill the cells (holes in the belt). Quality of singulation is best with spherical seed or seed made spherical through the addition of a seed coating. This technology is most appropriate for seed sizes ranging from tomato to watermelon.
-
Vacuum Style (Gaspardo, Heath, Monosem, Stan hay, etc.) – Air moves through holes in the periphery of a rotating disk singulating and trapping individual seeds against the metering plate. Excess seeds are removed with brushes and/or other mechanical means. Various models meter seeds ranging in size from lettuce to watermelon.
5 Field and Zone Shape Management
Increasingly, agricultural producers around the world are turning to larger and faster equipment to be timelier in their operations. For example, in North America it is common to see seeding equipment that ranges up to and beyond 10 m in working width, sprayers that exceed 25 m, and grain harvesters exceeding 5 m. This focus on ever-increasing machinery size poses a serious problem as we consider the capability of this equipment when it comes to addressing the inherent variability of agricultural lands.
Many agricultural regions of North America, Europe, and developing nations include production sites with numerous small and irregularly shaped fields. Typical planting practices when using large equipment require two passes around the periphery to establish the border rows. The interior region is planted with parallel passes. An example of a type of field found in Central Kentucky has an interior region of less than 50 % percent of the total (Fig. 6.2). Significant population variations occur across the planter width as the field margin is planted while turning. This is attributed to the outside rows dropping seed at the same rate as the inside rows while traveling at a significantly higher ground speed. The population across the planter width may vary as much as 100 % in tight turns, thereby wasting valuable resources such as seed, fertilizer, and pesticides. Population problems are further compounded when planting the point rows at the field margins. Equipment operators must determine if they will leave part of the field unplanted or plant into the border rows. In the latter case seed is wasted, and in some cases a yield reduction can be experienced in the double-planted regions. This problem is further compounded with subsequent spray and fertilizer applications.

Central Kentucky field with a total area of 40 ha. Two 24-row planter passes around the boundary of the field leaves 10.6 ha unplanted – approximately 50 % of the field is planted while turning
The delineation of management zones within agricultural field is becoming an area of study by itself (Fraisse et al. 1999). While the approaches vary significantly, there is one common thread – the shape and size of delineated regions vary significantly. What has prompted this track of research? In general, it is the realization that many factors contribute to variation. Some of the variation that exists can be traced to the underlying geology and processes controlling soil formation. Yet, other contributing factors include how this land was historically managed – pasture versus intensive row crop production.
Perhaps one of the more common approaches to describing this variability has been mapping soil series, which has occurred in the United States and many other countries around the world. While some might argue the utility of using soil maps for managing inputs for crop production, this example of a typical field soil (Fig. 6.3) sheds light on spatial management limitations that exist with equipment in the United States today. For clarity, the soil mapping units were clipped to the field boundary. And in this case the field boundary encloses only the cropped areas of the field excluding internal waterways and other grassed or forested areas not cropped.

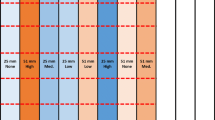
Management zone delineation for a typical field in Central Kentucky using soil series as the basis. Six individual soil series were mapped to three seeding rates for producing maize grain
While existing technologies continue to evolve, much of production agriculture in the United States is forced into “boom-width” management. Specifically, all variable-rate management is based on varying application or seeding rate across the implement width. With this limitation come several attendant problems that further degrade application accuracy. For most situations accuracy will be assessed as a summation of any deviation between the prescription map and actual application. With these definitions in mind, the following discussion explores several situations that contribute to “application error.” Specifically the following issues will be addressed: (1) GNSS GPS accuracy, (2) guidance aides, and (3) variable-rate control of inputs.
Variable-rate fertilization was one of the principal driving forces in the development of precision agriculture. The basic approach was to first grid soil sample the field on a 1.0 ha grid, submit the soil sample to a lab for analysis, and then develop a prescription map based on a set of rules that tied nutrient application levels to soil nutrient levels. VRT application relies on the integration of several components to form an application system (GPS, task computer, controller and metering mechanism, and distribution). For illustration purposes we will first discuss variable-rate application of granular fertilizers using a spinner disk and air-boom spreaders. In follow-up we will use an agricultural sprayer to highlight application errors associated with application over- and underlap and errors associated with the increasing application width of new sprayers. At the onset of these discussions, we recognize that proper setup and operation of this equipment is essential to minimize application errors. However, as with any technology, there are limitations to overall system performance.
As we learn how to manage the variability that exists within agricultural production units, as equipment continues to grow in size and speed, and on-the-go sensing technologies evolve, a new class of agricultural equipment will be required. Returning to the mid-1990s in the United States, the farm press introduced precision agriculture as “farming by the square foot.” However, this has never really been the case in mainstream agriculture. Perhaps a more accurate statement, even today, would be “farming by the boom-width.”
The first commercial offering of “farming by the square foot” technology can be credited to Solie et al. (1996) with the introduction of their combined NTech sensor and application control system. Originally, this system was developed to control the application of N to wheat based on reflectance sensing of crop N stress. The basis of this system is a reflectance sensing element coupled with single nozzle metering and application of N. Once calibrated, this system is operated in real time. Data is shared between sensor and site verification data is logged using CAN. Benefits accruing to the users of this technology include a significant reduction in N application (up to 30 %) with little impact on final yield.
Perhaps a more universal field operation that will benefit through the application of distributed control is seeding. Seeding technology has changed significantly over the last 70 years. The old cell style meters have been replaced with pneumatic meters. However, drives for all seeding metering mechanisms have remained the same – ground driven via roller chain. As the width of machinery continues to increase, seeding rates are still controlled via a ground-driven common shaft constraining today’s planter designs.
Much of today’s agricultural field machinery is designed for large agricultural regions. Contrasting the plains of Illinois with Central and Western Kentucky, there are significant differences in planting practices. In Kentucky no-till production is preferred and seeding must be accomplished under extreme conditions – high residue environments. High residue environments pose two problems: penetration for placing the seed below the soil surface and the ability to see the marks left by the marker arms. The latter problem causes confusion on the part of operators in that row spacing between adjacent planter passes is inconsistent and portions of a field are left unplanted or are double planted.
5.1 GNSS and Automated Guidance
The continuing integration of technologies such as GNSS, GIS, and CAN provide new opportunities for agricultural producers to better control metering and placement of crop production inputs (seed, fertilizer, and chemicals) during field operations. A significant driving force with these technologies is reduction in cost to a point where most components are affordable to producers of nearly any size. For example, agricultural-grade GPS receivers purchased in 1995 cost nearly $5,000 (US) with differential correction signal subscriptions of up to $800 (US) per year. The horizontal accuracy of these receivers was on the order of 2.0–3.0 m. Today, US producers can purchase receivers with free Wide Area Augmentation System (WAAS) correction for under $100 (US). The horizontal accuracy of these receivers is reported to be less than 2.0 m.
The single technology that now affords farmers the opportunity to manage variability is GNSS. Although this navigation technology existed for some time, it was not until the deployment in space that 24-h per day coverage became available to civilian users. In the United States, agricultural producers rely on the Global Positioning System (GPS) as deployed by the Department of Defense. It is nearly impossible to initiate a discussion on GPS with US farmers without discussing system performance and cost. Nearly all US producers recognize the trade-off between cost and accuracy. Unfortunately, the subject of GPS accuracy is not universally understood by end users. Most manufacturers focus on the positive attributes of their systems while minimizing unflattering performance attributes that may be important to end users. To this end it is essential to understand accuracy and precision within the context of GPS coordinate fixes. More importantly, when GPS and/or GNSS are deployed for field operations, what can the end users expect?
There are essentially four classes of GPS receivers – low cost (2–3 m horizontal accuracy), agricultural grade (submeter), dual frequency (decimeter), and RTK (centimeter). All four classes require some form of differential correction, and as accuracy increases, so does cost. In the final analysis, the end user must consider carefully their requirement and the cost they can bear. Often, these users rely on industry-generated horizontal accuracy data for their purchase decisions.
5.2 Static Versus Dynamic Accuracy
While static accuracy is a good first approximation of how the GNSS receivers perform in actual applications, the deployment of GNSS in agricultural is unique. In most applications the receiver will be moving (e.g., yield monitoring, machine guidance, and variable-rate application). In reality the only static application of value to crop producers may be soil sampling. What, if any, are the differences between static and dynamic receiver accuracy for agricultural applications?
Perhaps the best approach to understanding dynamic accuracy in agricultural applications is to review test data collected by Stombaugh et al. (2005). The authors constructed a test track to address common situations that arise in agriculture (Fig. 6.4). The track consists of a closed, elevated I-beam with two 90 m parallel runs, a constant radius 180° turn, and four additional turns of varying radii (Fig. 6.5a).

(a) Continuous test track with 100 m straight parallel section and turns of varying radii and direction. (b) Test car with RTK rover and data logging device for extended testing (Stombaugh et al. 2005)
Test data (Fig. 6.5b) were plotted from a receiver that was operated at a constant velocity in a clockwise (CW) direction. In turn the receiver appears to be averaging the position fixes, thereby creating an apparent receiver track that is skewed to the outside of the 180 degree turn. The error distribution seems to be an artifact of changes in receiver direction along the test track. In some application these errors may be of little consequence – such as for pass-to-pass guidance for spraying operations. For applications such as controlled traffic, where subsequent passes must be made in the same wheel tracks, and a variety of receivers are used, absolute errors may be unacceptable. If, in fact, these errors are systematic and repeatable, a simple offset correction may prove acceptable. Increasingly, the specification of dynamic performance is warranted given the demand for improved horizontal accuracy with today’s equipment.

(a) Test track configuration with turns of five varying radii and 100 m parallel straight section for pass to pass receiver evaluation (Stombaugh et al. 2005). (b) Example test data set collected from a low-cost GPS receiver operated CW at constant velocity on the test track (Stombaugh et al. 2005) (Note: Directional dependence of deviations from test track centerline particularly in turns)
Horizontal “static accuracy” is the default metric reported with regard to GPS receiver performance and “accuracy” is “lack of error.” The major problem encountered when evaluating GNSS receiver accuracy is knowing the “true” position for comparison purposes. For the accuracy values reported in manufacturer’s literature, the end user must know if the accuracy being reported is “relative” or “absolute.” “Accuracy” can be thought of in two parts: “precision” and “bias.” “Precision” is the ability of the GPS receiver to produce the same position fixes (latitude and longitude) repeatedly when the receiver is in a fixed location. The difference between the position fix reported by the receiver and the “true” location is termed the “bias.” While the receiver may be very “precise,” overall accuracy can suffer when a large “bias” exists. Are manufacturers reporting receiver “precision” with or without “bias”? Accuracy without the bias is referred to as “relative accuracy” while accuracy with the bias is termed “absolute.” When managing inputs in accordance with zones, absolute positioning is essential for establishing the delineation between zones. For repeated field operations where production managers desire to control wheel traffic, control applications within zones, or plant into strip-till zones, knowing absolute receiver accuracy is essential.
The application of GNSS to guidance was first realized through the development of lightbars to assist the equipment operator in steering the vehicle to make adjacent, parallel passes at a predetermined distance. Acceptance of these devices was swift, in part, because of expanding equipment widths and difficulty experienced by equipment operators using foam marking systems (Wilkerson et al. 2003). The other selling feature of lightbars was the limitation of liability as operators were still required to steer the machine. More recently it was recognized that output from the lightbars in the form of guidance errors could be utilized in closed-loop feedback control to automatically steer the tractor. Essentially, this error signal is utilized to actuate a steering valve to guide the tractor along a predetermined path.
A large two-wheel drive (2WD) tractor with front wheel assist (FWA) was outfitted with a commercially available automatic guidance system and field tests were conducted (Veal et al. 2009). To study the motion of the tractor and implement, two RTK GPS receivers were fitted to the nose of the tractor and the center of the implement. The RTK GPS receivers used in this study achieved the same level of horizontal accuracy as the RTK system used with the automated guidance system. Position data were collected simultaneously for all three receivers and saved to a text file in a laptop. The tractor’s path was set to allow for six concurrent 200-m-length parallel passes. Ground speed was set at 8.4 km/h for all test runs. Steering sensitivity settings were selected in accordance with implement type and draft load per recommendations published in the in the user’s manual. The field implements used in this study included a 16-row towed planter, 16-row integral planter, and 4 m wide secondary tillage tool. Position data were collected from three RTK receivers and were converted from latitude-longitude (WGS84) to UTM coordinates then rotated to simplify the error calculations. A virtual A-B line was projected for each pass based on implement spacing (see Fig. 6.6). Cross-track errors (normal distance from traveled path to the projected A-B line) were determined for the logged data from each receiver. ANOVA (analysis of variance) tests of the error data were conducted to determine which factors influence the magnitude of cross-track error.

Cross-track error determination for tractor guidance and implement following
It was concluded that (1) the automated guidance systems steered the tractor along predetermined straight path (A-B line) with cross-track errors ranging up to 12 cm and a mean error of 3.21 cm; (2) tracking of the implement along the A-B line was not as accurate; (3) depending on soil conditions, slope, and steering sensitivity, the implement cross-track error may be 10 times greater than the cross-track error calculated at the receiver location on the tractor; (4) cross-track errors for the integral and towed planters were similar; and (5) steering sensitivity was found to influence cross-track errors.
The implement cross-track error clearly has the greatest variability and the highest average error for a given implement and steering sensitivity (Fig. 6.7). Also, it appears that the tillage tool and the towed planter appear to trail the tractor along the A-B line better than the integral planter. This data supports the concept that greater mechanical impedance created through the implement/soil engagement improved tracking accuracy and stability of the trailing implement. The data also supports that improved implement stability translates into improved overall system performance as it appears the tractor and tillage tool produced the most accurate A-B line tracking scenario. The box plot for the tractor receiver (top figure) has the least amount of variability and the lowest average cross-track error (typically less than 4 cm). Also, the variability of the cross-track error is smaller for steering sensitivities in the middle of the suggested range.

Cross-track errors for tractor guidance (a) and drawn implement (b)
Many producers are looking for solutions that ensure implements follow with similar horizontal accuracies. A solution gaining in popularity is the addition of a second complete guidance package for the implement. In the case of soil-engaging implements, the steering mechanism is actually two or more large-diameter straight coulters mounted on kingpins and steered by a hydraulic cylinder. In turn the kingpins are mounted to the tillage implement via a bolt-on subframe. The coulters penetrate the soil surface generating sufficient lateral forces to steer the implement and reduce cross-track errors. While the cost of implement and tractor guidance is double that of tractor guidance, the solution allows soil-engaging tools to track with the tractor. When using RTK GNSS, subsequent field operations can be controlled with high absolute accuracy and precision. Implement guidance makes subsequent mechanical cultivation in close proximity to germinating and/or emerging plants possible – thereby adding significant value to organic cropping systems which rely on mechanical cultivation (Sorensen and Jorgensen 2005; Katupitiya and Eaton 2008; Young 2010).
5.3 Variable-Rate Control
Ground drive systems on the planters do not have the capability to perform variable-rate seeding. Hydraulic drive systems are used to vary the speed of the seed metering units to achieve variable-rate seeding. These drive systems consist of a hydraulic motor which is powered from selective (hydraulic) control valve on the tractor. Current day tractors have the capability to keep up with the flow rate demands of the hydraulic motor running the row unit seed meters. By varying the speed of hydraulic motor, seed population (seeds/acre) can be varied. A commercially available variable-rate drive system is used to drive the seed meters on a row crop planter, which allows the operator to program up to six seeding rates and then change seeding rates on-the-go during planting. The latter can be achieved through manual changes in seeding rate commands or automatically via map-based prescriptions. When a seed rate change is issued to the controller, the fluid flow rate to the hydraulic motor is altered. A speed sensor mounted on the motor sends a feedback signal to the controller confirming the change in the seeding rate. Additionally, motion sensors and potentiometers are installed on the planter frame to switch the row units ON and OFF when the planter is lowered and raised.
5.3.1 Section Control
Automatic section control enables wide implements to apply crop inputs (e.g., seed, fertilizer, and chemicals) across via user-selected section widths of the implement. Mechanical power directed to individual seed meters can be controlled either individually or by sections by installing mechanical clutches. The control sections are turned off when the planter passes through already-planted areas in the field avoiding double planting. The significance of section control is evident when the planter passes through point rows, waterways, and headland turns. Overplanting (doubles) and underplanting (skips) are avoided with section control, which translates to material input cost savings and improved yields, respectively. Planters with section control yielded an average savings of 4 % on seed costs and the savings increased for irregular-shaped fields with grass waterways and terraces (Fulton et al. 2011).
Section control requires a GNSS receiver, controller with enough channels to issue commands to the appropriate number of sections, and row clutches to engage and disengage the seed meters. North American equipment manufactures provide automatic section control systems with either pneumatic or electric clutches (Fig. 6.8).

(a) Pneumatically actuated row clutch (Source: http://www.trimble.com/agriculture/trucount.aspx). (b) Electrically actuated row clutch (Source: http://www.agleader.com/products/seedcommand/sectional-control/)
5.3.2 Seed Drop Sensors
Seed drop sensors have become an integral performance monitoring aspect of nearly all agricultural planters. Initially developed to provide equipment operators with feedback regarding proper planter operation (e.g., planter boxes that are out of seed, plugged seed meters), these devices now provide important feedback on the accuracy and precision of seed drop and spacing. Increasingly, producers rely on the signal produced from this sensor to evaluate the overall performance of the single most important aspect of their farming operation. Seed monitoring sensors are located on the seed tube to count the seed that is dropped from the planter row units (Fig. 6.9). This sensor allows the operator and the planter controller to diagnose problems with the seed metering units by identifying skips and doubles. Typical seed tube sensors can be of optical type or radio wave based. Optical-type sensors sense the shape of the kernels that are dropped, whereas the radio wave-type ones sense the mass of the kernels using high-frequency radio waves. Given the dusty environment the planters work in, radio wave-based sensors perform better as they are not prone to dust. Since the wave-based sensors are measuring the mass and not the shape, they can accurately differentiate between single and double kernels.

Seed drop tube and sensor for assessing seed drop rate (Picture courtesy of S. Pitla)
5.3.3 Down Pressure Sensing and Control
Downforce on planter row units should be controlled to ensure ideal planting depth. Undulating field terrain offers varying resistance on the row units, and the planter has to adjust to these upward dynamic forces. Just enough force should be applied to keep gauge wheels on the ground and allow the double disk openers to drop the seed at the right depth. Excessive downforce can compact the soil, whereas a downforce less than the required can lead to shallow planting. Thus, proper downforce adjustments on planter row units become significant for improving yields, which includes a sensor that adjusts the depth for the gauge wheels (Fig. 6.10a).

(a) Planter down force sensor assembly (Source: http://salesmanual.deere.com/sales/salesmanual/en_NA/seeding/attachments/monitor_system/planters/seedstar_xp_row_unit_components.html) and (b) Hydraulic down-pressure actuator for agricultural planters (Source: http://www.dawnequipment.com/Dawn_Hydraulics.html)
Downforce can be applied either hydraulically or pneumatically and can be made automatically corresponding to the undulations in the ground during planting to place seed at the right depth. Hydraulic systems have a faster response time in mitigating the uneven terrains relative to the pneumatic systems. A hydraulic downforce system uses a hydraulic cylinder to put downforce on individual row units based on the feedback obtained from the gauge wheel sensor (Fig. 6.10b). The gauge wheel sensor measures the weight of the row units on the gauge wheels. In the pneumatic downforce system, the hydraulic cylinder is replaced by airbags that push the row units down.
5.3.4 Distributed and Embedded Controls
The deployment of electronics to agricultural field machinery was first met with skepticism in the mid-1970s. In North America the first agricultural electronics released to consumers were basic in nature often controlling only one or two machine functions such as bale tying and ejection for round balers. Since this time end users have come to appreciate the versatility this technology brings to the control and adjustment of chemical application and seeding. In spite of the harsh environment (e.g., dust, vibration, corrosion chemicals, temperature extremes, moisture), controls are being added to modern equipment to achieve everything from emission reductions in off-highway diesel engines to complete adjustment of threshing and cleaning shoe settings when changing between harvesting of multiple crops and agricultural grain combines.
CAN-bus controls on agricultural tractors and implement are now commonplace. Demmel et al. (2001) reported on the use of the LBS DIN 9684 communications bus for accumulating field operations data. Erhl et al. (2002) investigated the effect of positioning system accuracy on data collected under the system proposed by Demmel et al. (2001). Darr et al. (2003) proposed a structure for tracking and reporting field operations. Central to this system was the use of CAN to accumulate data from an agricultural sprayer. The accumulated data were stored in a format that supported export to a variety of software packages for further analysis.
Implementation of CAN-bus communications is proceeding at a rapid pace in the United States. Stone et al. (1999) overviewed the progress of developing and implementing ISO 11783: An Electronic Communications Protocol for Agricultural Equipment. Implementation of control networks in agricultural machinery began in the mid-1990s. DIN 9684 and SAE J1939 provide the impetus and basis for developing ISO 11783. CAN 2.0B emerged as the favored message structure in ISO 11783 in part because of the 29-bit identifier when compared with the 11-bit identifier utilized in the LBS standard. The development and refinement of ISO 11783 continues to this day.
Implementation of the ISO 11783 has been reported by some researchers within the agricultural engineering profession. For example, Wei et al. (2001) employed CAN in the development of a distributed control sprayer. The sprayer was comprised of several reflectance sensing elements. Weeds were identified using color reflectance indices. Weed identities were passed to the sprayer control system via a CAN bus. Bus information was integrated with GPS data for the purpose of developing weed and spray application maps.
The current availability and low cost of microcontrollers coupled with the development of CAN communications are making distributed control of agricultural field machinery a reliable and cost-effective reality. CAN technology was first implemented in the automotive industry. Increasingly, with Tier II and III emission requirements, nearly every diesel engine manufactured today is equipped with CAN-based controls. Obviously, these actions have facilitated the move to off-highway use of the same technology.
CAN communication relies on a voltage differential between two wires – one that is high (CAN_H 3.5 VDC) and the other that is low (CAN_L 1.5 VDC). It is the time-varying voltage differential between these two wires that enables robust communications between devices with excellent immunity to signal noise. This two-wire bus is the physical layer of a CAN and has changed little since the initial development of CAN protocols. Data transfer rates of up to 250 Kbits/s are possible with CAN 2.0B serial buses (ISO 11783).
CAN is a message-based protocol unlike more traditional bus communications that are addressed based. Messages are transmitted to all devices (ECUs) on the bus. Embedded within each message is the priority of the message and the data being transmitted. Each ECU receives every message and then must decide if any action is warranted or if the message should be ignored. Alternately, each ECU may request information from any other ECU via a remote transmit request (RTR). The flexibility of this protocol permits ECUs to be added to the bus without reprogramming any of the existing ECUs thereby enhancing system expandability.
Under CAN 2.0B (ISO 11783) 134-bit messages can be sent at a rate of 1,900 messages per second. For example, a 10 Hz GPS receiver (generating 10 messages per second) uses less than 0.5 % of the total bus bandwidth. Further, message latency rarely exceeds 0.5 ms. The bottom line is that for agricultural applications where update and control rates of 1 Hz are common, the CAN 2.0B bus has significant bandwidth for most field activities even when the recommended limitation of 30 % of the total bus capacity is observed.
5.3.5 Electric Seed Meter Drives
Recent commercial offerings of similar, single-meter, electric drives were introduced in 2013 by US and EU manufactures. For the US manufactures, an internal ring gear was added to the pneumatic seed meter plate. This ring gear is driven via a 24 VDC electric motor with pinion gear (Fig. 6.11a). During the same cropping season, a German manufacturer (Fig. 6.11b) introduced a precision planter for the US market which utilized electric drives with a substantially smaller diameter seed meter when contrasted with other meters in the marketplace. The European planter required 90 A (12 VDC) of current to supply 24 seed meters. At the time of this publication, the US-based manufacturer was able to control seeding rates on a row by row basis.

Precision seed meters with electric drives: (a) Kinze Manufacturing (US) product offering (Source: http://www.kinze.com/feature.aspx?id=593&4000+Series+Vacuum+Meter) and (b) HORSCH Maschinen GmbH (Germany) product offering (Source: http://www.horsch2.com/en/products/seeding-technology/single-grain-seed-drills/maestro-cc/)
From unpublished work conducted by the authors, the following example highlights the development of robust, CAN-based, control system for seeding equipment (Fig. 6.12). This control scenario is the missing link needed for successful implementation of high precision seeding in North America. However, the justification for CAN-based control is multifaceted. The focus of this work was to (1) demonstrate the merits of CAN-based control, (2) highlight existing prototype development in US universities, and (3) fully develop CAN-bus communications for seeding equipment. In reality this same technology can be extended to field operations that involve chemical and fertilizer application. Similar benefits will accrue to those that adopt this compliment of technologies for all field activities that involve the metering and placement of crop production inputs.

Final prototype planter with GPS for generation of differential toolbar speed (a). Single row CAN node and motor controller (b). DC gear motor drive with sensor integration (c)
For seeding equipment the goal was to replace the traditional mechanical drives with electric drives to facilitate the concept of individual row control. A review of existing seed metering devices led to the selection of a DC geared motor that would be able to produce sufficient speed for driving seed meter under actual field conditions (ground speed of 12+ km/h and populations of 90 K seeds/ha.) while providing adequate torque at low speeds. For prototype development modern, eight-row planter was selected. The motor utilized for this application was a permanent magnet 12 VDC motor with a worm gear right angle drive that produced 25 N.m of torque at speeds up to 70.0 rpm. The motor had a starting current of 7.0 amps and a continuous running current of 2.8 amps.
Speed control of the motor was accomplished using an H-bridge motor controller. The H-bridge allows bidirectional control of the motor as well as braking capabilities. This particular controller was equipped with pulse width modulation (PWM). PWM is a digital square wave output with varying duty cycle or ratio of on-time to off-time. At high frequencies this signal becomes an average voltage output, percentage of full-scale voltage, which is very powerful in motor speed control. Motor speed feedback was needed to ensure precise metering of desired populations. This was achieved via an optical encoder. The optical encoder uses a combination of a light source, a rotary disk with evenly spaced windows, and a photodetector to measure angular displacement or angular speed. The initial prototype used optical encoder which generated 360 pulses per revolution of the output shaft of the motor drive. The processor selected to complete these tasks was an 8-bit microcontroller with 16-bit timer/counter, PWM, 32 K of FLASH memory, 1.6 K SRAM, 256 bytes of EEPROM, and a CAN engine. The microcontroller computes the desired motor speed from these variables and changes the PWM output until the desired rpm was achieved. The actual motor speed (10.0 Hz) and seed drop rate (1.0 Hz) were returned to the computer for logging.
Tests were completed to evaluate the ability of the system to precisely meter a desired population. System response to step input changes in ground speed was also evaluated. The 50 pulses per revolution provided by the encoder on the motor shaft produced 2,500 pulses per revolution of the output shaft. This combination allowed the system to sense 0.25 rpm difference at the output shaft at a 10.0 Hz sampling rate. Each seed meter was equipped with a control ECU, a motor controller, the motor/encoder combination, and a seed drop sensor. The system response to step inputs of the refined drive mechanism was quite accurate (Fig. 6.13). PID (proportional, integral, and derivative) feedback control was implemented to improve system response time, dampen speed oscillations, and improve steady-state errors.

Step response of initial prototype electric seed meter drive
Two, low-cost, GPS receivers were used to determine the speed differential across turning speed of the planter. The receivers utilized WAAS differential correction with a reported horizontal accuracy of 2–3 m. A receiver and a control ECU were placed at each of the outside rows and would read the velocity from the serial (RS-232) VTG NMEA string and send this over the CAN bus. Each meter ECU reads these two speeds to determine its velocity relative to its position on the planter. Map-based individual row control was accomplished using Windows-based task computer.
6 Crop Thinning
Thinning is the selective removal of seedlings or young plants to allow adequate space for the remaining plants to grow efficiently. In large-scale farming, techniques like precision seeding and transplanting can eliminate the need for thinning by starting plants at their optimum spacing. Unfortunately, for direct-seeded crops with small seed and poor germination, precision seeding may not produce desired results. For example, beets, carrots, onions, and other crops are often seeded at higher rates and then mechanically thinned to produce the desired plant density.
Crop thinning is the process of removing overpopulated plants to achieve desired yield and crop quality goals. Typically, the weakest seedlings in a row of crop are removed to create space for bigger and stronger seedlings. The premise is to reduce competition for sunlight, nutrients, and water intake to the strongest seedlings so that they can grow to their maximum potential. Crop thinning is done in forestry, direct-seeded row crops, specialty crops, and vegetable crops. Thinning operation is especially indispensable for crops like spinach, lettuce, cabbage, arugula, parsley, and cilantro where the leaf yield is crucial. Root crops like radish, carrots, parsnips, and sugar beet are also thinned to boost yields.
Manual thinning is physically challenging and monotonous and can cost up to $ 100 per acre in labor costs (Siemens et al. 2010). Crop thinning automation is seen as a way to mitigate labor shortages and high cost of production. Researchers are working on advanced crop thinning prototypes (Fig. 6.14), while some specialized thinning machines are already commercially available (Fig. 6.15). Automatic thinning is typically done either by mechanical cutting of the selected plant or by killing the plant using selective herbicidal spraying. In both cases, a machine vision system or an optical sensor is used to identify the plants to be removed from the row.

Automated thinner prototype (Source: http://cemonterey.ucanr.edu/files/132403.pdf)

Crop thinning machine (Source: http://www.cemcoturbo.com)
For example, an automatic thinner for lettuce consists of an onboard computer which houses the control algorithm to categorize the plants into the ones that need to be removed and the ones that need to be kept. The computer obtains signals from the machine vision system and provides ON/OFF control commands to spray the seedlings based on categorization. Raw images of the lettuce seedlings (Fig. 6.16a) are processed by the onboard computer (Fig. 6.16b). Based on seedling characteristics, the computer algorithm identifies seedlings to be eliminated from the crop row (Fig. 6.16c). The automated thinning operation results in a thinned crop row (Fig. 6.16d).

Lettuce seedlings. (a) Raw image. (b) Processed image. (c) Plants to be eliminated are identified by the computer algorithm. (d) Thinned versus not thinned crop row (Source: http://cemonterey.ucanr.edu/files/132403.pdf)
Another commercially available row crop thinner works by selectively spraying chemicals for thinning (Fig. 6.17). This automated thinner can operate at ground speeds of up to 6.4 km/h. Selective spraying of the unwanted plants is achieved using computer vision and a touch screen controller mounted in the cab of the tractor.

Row crop thinner (Source: http://www.agmechtronix.com/RCT.aspx)
7 Conclusions
The specification and addition of technology to stand establishment operations affords producers many options to achieve optimal crop performance. Increasingly, the cost of genetically modified organisms (GMOs) and biological and chemical seed treatments (Dyer et al. 2012; Munkvold et al. 2006) demands high-level accuracy and precision in seeding operations. Alternately, when it is impractical to singulate individual seeds because of seed size or shape, producers may choose to overseed a crop and then thin the resulting stand to achieve an optimal stand. In either event several enabling technologies are available to enhance the likelihood of success.
Pursuit of the optimal system for establishing desired crop stands begins with selection of the seed meter. As early as 1960 Mahoney (1959) recognized the need for “precision equipment for all phases of growing…” including precision placement of seed and fertilizer. When contrasting recent pneumatic seed meter development with the mechanical meters of the past, producers are now able to singulate a wider range of seed (hybrids, cultivars, and species) than ever before. The days of using fluted metering rolls for many crops (e.g., small grains, milo, canola, sugar beets) may be a thing of the past. However, seeding of some vegetable and specialty crops remains somewhat problematic with regard to small seed (e.g., celery, lettuce, radishes, brassica, onions). While meters for these crops continue to improve and seed producers do a better job of growing and processing quality seed, optimized yield may justify continued overseeding and thinning to desired plant stands.
Characteristics of the precision planting systems (tractor and planter combination) of the future will change in three key areas, including (1) precision seed meters and methodologies that deliver and position seed within the furrow while preserving seed orientation to optimize emergence uniformity and enhance plant canopy architectures (Torres et al. 2011); (2) individual row stepper motor drives that index seed placement in accordance with distance traveled to maintain desired plant densities and/or indexing of seed location between adjacent rows to desired crop canopy architectures; and (3) seed metering capabilities that support seeding of multiple varieties/hybrids within one field to match plant genetics with soil landscapes or multiple cultivars in polyculture systems (Fisher 2011). It is envisioned that these advanced planting systems will have robust and dynamic features that involve both the tractor and implement (Table 6.1).
References
Darr MJ, Stombaugh TS, Ward JK, Montross MD (2003) Development of a controller area network based handheld data acquisition system for identity preservation. ASAE paper no. 031103. Annual international meeting. Riviera Hotel and Convention Center, Las Vegas, NV, 27–30 July 2003
Demmel M, Rothmund M, Spangler A, Auernhammer H (2001) Algorithms for data analysis and first results of automatic data acquisition with GPS and LBS on tractor-implement combinations. In: Proceedings of 3rd European conference on precision farming in agriculture, Montpellier, France, 18–20 June 2001
Dyer A, Johnston J, Burrows M (2012) Small grain seed treatment guide. Montana State University, Bozeman
Erhl M, Demmel MR, Auernhammer H, Stepfhuber WV, Maurer W, Wunderlich T (2002) Spatio-temporal quality of precision farming applications. ASAE paper no. 023084. Annual international meeting. Hyatt Regency, Chicago, IL, 28–31 July 2002
Fisher M (2011) Do polycultures have a role in modern agriculture? CSA News, pp 4–10
Fraisse CW, Sudduth KA, Kitchen NR, Fridgen JJ (1999) Use of unsupervised clustering algorithms for delineating within-field management zones. ASAE paper no. 993043. ASAE international meeting, Toronto, ON, Canada, 18–21 July 1999
Fulton J, Brooke A, Winstead A, Ortiz B (2011) Precision agriculture series – timely information: Automatic Section Control (ASC) technology for planters (https://sites.aces.edu/group/crops/precisionag/Publications/Timely%20Information/Automatic%20Section%20Control%20%28ASC%29%20Technology%20for%20Planters.pdf)
Heege H, Billot J (1999) Part 1.3: Seeders and planters. In: Stout BA, Cheze B (eds) CIGR handbook of agricultural engineering, vol III: plant production engineering. ASAE, St. Joseph, pp 217–240
Katupitiya J, Eaton R (2008) Precision autonomous guidance of agricultural vehicles for future autonomous farming, ASABE paper no. 084687. ASAE, St. Joseph
Mahoney CH (1959) The canning industry’s need of precision agricultural equipment. Trans Am Soc Agric Eng 1960:99–101, 104
McDonald MB (2008) Physiology of seed germination. The Ohio State University, Columbus
Munkvold G, Sweets L, Wintersteen W (2006) Iowa commercial pesticide applicator manual: seed treatment. Iowa State University Extension, Ames
Sanders DC (1997) Precision seeding for vegetable crops. Publication HIL-36, North Carolina Cooperative Extension Service, North Carolina State University, Raleigh
Siemens MS, Herbon R, Gayler RR, Brooks D, Nolte KD (2010) Automated machine for thinning, weeding and spot spraying (Source: http://cemonterey.ucanr.edu/files/132403.pdf)
Solie JB, Raun WR, Whitney RW, Stone ML, Ringer JD (1996) Optical sensor based field element size and sensing strategy for nitrogen application. Trans Am Soc Agric Eng 39(6):1983–1992
Sorensen CG, Jorgensen MH (2005) Intra-row weed control in organic crops – technical perspectives, capability and operational costs, ASABE paper no. 054146. ASAE, St. Joseph
Srivastava AK, Goering CE, Rohrbach RP, Buckmaster DR (2006) Chapter 9: Crop planting. In: Srivastava AK (ed) Engineering principles of agricultural machines, 2nd edn, ASABE. ASABE, St. Joseph, pp 231–265
Stombaugh TS, Cole J, Shearer SA, Koostra BK (2005) A test facility for evaluating GPS dynamic accuracy. In: Proceedings of the fifth European conference on precision agriculture Uppsala, Sweden, 8–10 June 2005, pp 605–612,
Stone ML, McKee KD, Formwalt CW, Benneweis RK (1999) An electronic communications protocol for agricultural equipment. ASAE paper no. 913C1798. Agricultural equipment technology conference, Louisville, Kentucky, 7–10 Feb 1999
Torres G, Vossenkemper J, Raun W, Taylor R (2011) Maize (Zea Mays) leaf angle and emergence as affected by seed orientation at planting. Explor Agric 47(4):579–592. doi:10.1017/S001447971100038X
Veal MW, Shearer SA, Stombaugh TS, Luck JD, Koostra BJ (2009) Automated tractor guidance and implement tracking error assessment. In: Proceedings of VDI-MEG conference of agricultural engineering (Nr.2060) 67th international conference Land.Technik – AgEng, Hannover, 6–7 Nov 2009. VDI verlag GmbH, Dusseldorf
Wei J, Zhang N, Oard D, Stoll Q, Lenhert D, Neilsen M, Mizuno M, Sing G (2001) Design of an embedded weed-control system using Controller Area Network (CAN). ASAE paper no. 013033. Annual international meeting. Sacramento Convention Center, Sacramento, CA, 30 July–1 Aug 2001
Wilkerson JB, Hart WE, Moody FH, Stombaugh TS, Morrow TF (2003) Evaluating operator feedback accuracy of row-guidance systems with GPS, ASAE paper no. 031012. ASAE, St. Joseph
Young SL (2010) Weed control in organic cropping systems, can automation fill the gap? Resour Eng Technol Sustain World 17(1):8–9
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Shearer, S.A., Pitla, S.K. (2014). Precision Planting and Crop Thinning. In: Young, S., Pierce, F. (eds) Automation: The Future of Weed Control in Cropping Systems. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-7512-1_6
Download citation
DOI: https://doi.org/10.1007/978-94-007-7512-1_6
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-7511-4
Online ISBN: 978-94-007-7512-1
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)