
Abstract
Time geography offers a rich framework for representing movement across space and time. An extension of time geography to crime mapping, as proposed by the models discussed in this chapter, requires an accounting for victim and offender mobility under event-related constraints (e.g. accessibility to a crime scene). This chapter discusses results from a study that evaluates the usability of 3D space-time cube maps for representing crime patterns. Also considered is the utility of the time-geographic framework for exploring crime events that occur at unknown points in space and time. To this end, this chapter discusses the problem of crime activities that are not amenable to point-based mapping, potential alternative visualization methods using time-geographic techniques, and the procedures and results of usability tests wherein participants were asked to interpret maps that incorporated various time-geographic attributes. The overall purpose of the study was to assess the practicality of using time geography within a crime mapping context.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The use of mapping for exploring and analyzing the spaces of crime has grown considerably in recent years. Uncovering hotspots, criminal networks, flows, and investigative leads have become common goals in the application of crime mapping by both researchers and practitioners. Further, particular focus on the influence of the urban physical form for revealing geographic patterns of crime, known as environmental criminology (Brantingham and Brantingham 1993), has become the basis for modern crime pattern theory. This perspective, whose focus on nodes and pathways draws heavily on the work of architectural theorist Kevin Lynch (1960), pays particularly close attention to the ways in which structural forms influence behavioral patterns, of both perception and movement. Crime pattern theory, in turn, has come to inform many state-of-the-art policing practices, particularly concerning the allocation of scarce police resources.
Crime pattern theory is typically applied in crime mapping through routine activities theory (Felson and Clarke 1998), which holds that a criminal event is necessitated by three elements coming together in space and time: a victim (or target), an offender, and an opportunity. The investigative application of routine activities theory, popularly termed geographic profiling (Rossmo 2000), is utilized to identify patterns of offense and develop search strategies (LaVigne et al. 2000). Building on Newton’s (1988) pioneering work in geoforensics, geographic profiling centers on using available data to locate an offender’s base of operations, or haven, so that police resources can then be concentrated around that base and the offender can be apprehended (Leitner et al. 2007). Although it receives little direct attention in the literature, cartographic representations, or maps, play a key role in geographic profiling, both for identifying the offender’s haven and for communicating that location to on-the-ground police personnel.
A particular challenge for geographic profiling, and crime mapping in general, is that some crimes, such as identity theft, defy traditional cartographic representation because of the fragmented nature in which such incidents occur across space and time (Hubers et al. 2008). Other crimes, such as thefts on crowded public vehicles in transit, do occur at singular locations in space and time, however they too challenge cartographers because the precise time-space locations of these crime-events are rarely if ever known. It is to this latter type of crime that we turn in this chapter. In these types of crime, the mobility of both the perpetrator and the victim confound conventional forms of investigative mapping. These types of crime events require a novel approach to mapping crime spaces.
Techniques such as travel demand modeling and (route) kernel density estimation (KDE) are found in the existing crime mapping literature and do address the topic of mobility and crime. For instance, in an effort to identify incident routes between known offender addresses and robbery locations, Levine (2010) utilized a street network grid of Chicago applying various impedance function calculations to develop a gravity model based on data from robberies in 1997 and 1998. KDE is an increasingly popular technique favored for its flexibility when setting parameters such as the grid cell size and bandwidth (Chainey et al. 2008). Further, KDE provides a visually pleasing smooth surface which can be utilized to identify crime hot spots. However, applications of KDE are limited to cases where the location of the crime event is known. The research discussed in this chapter addresses problems encountered in mapping crime events that, although still profoundly geographic, are not reducible to single points in space and time.
The consideration of mobility and corresponding space-time factors as part of a spatial analysis of events (e.g. incidents of disease or crime) is hardly novel. Indeed, one of the most widely adopted space-time approaches to spatial analysis of events is the Knox test (Knox 1964). The Knox test is a statistical technique used to determine whether events are clustered in both space and time. And while the Knox test is commonly cited in the epidemiology literature (Schmertmann et al. 2010), it has also found use in crime mapping (Grubesic and Mack 2008). Brunsdon et al. (2005) provide an excellent review of a variety of methods utilized for visualizing space and time crime patterns. However, notably absent from their review are any applications of Hägerstrand’s time geography.
Time geography (Hägerstrand 1970) offers a rich framework for representing movement across space and time (Kwan and Lee 2004; Miller 2005; Pred 1977). Discrete activities, viewed from the perspective of an individual’s mobility, are recognized as being bounded by defined constraints. Given these constraints, time geography utilizes visual semantic tools to explain individual movements in space and time. An extension of time geography to crime mapping, as proposed by the models discussed in this chapter, requires an accounting for victim and offender mobility under event-related constraints (e.g. accessibility to a crime scene).
To explore the potential for time geography-based visualizations to depict the spatial dynamics of mobile crimes, and to assess the practicality of these visualizations for interpreting crime patterns and allocating police resources, this chapter reports on results from a study conducted in 2009–2010 in which nine scholars and ten practicing crime investigators participated in a series of usability tests in which they were asked to manipulate and interpret visualizations that, to increasing degrees, incorporated time-geographic techniques. Quantitative analysis of participants’ success in interpreting the maps revealed a high level of usability, even for the most sophisticated applications of time geography. However, qualitative results from the interviews suggest that while many participants in both groups recognized the potential utility of time-geographic techniques for crime mapping, usability issues constrained many of them from fully realizing these benefits (usefulness), and this was especially so for members of the practitioner group. These findings suggest that time geography has much to contribute to crime mapping and analysis, but that first advances must be made to improve the technique’s usability.
2 A Brief Explanation of Time Geography
Although a full literature review of time geography is beyond the scope of this chapter it is worthwhile to explain the fundamental constructs that make up the approach since it has seen little application within the context of crime mapping. The explanatory tools behind time geography rest on the fundamental tenet that human activities have both spatial and temporal dimensions and that these cannot be meaningfully separated. Individual mobility in these dimensions is recognized as being bounded by certain space and time constraints. Hägerstrand (1970) categorizes the concept of constraints as fitting within one of three types: capability, authority, and coupling. These three categories of constraints are seen as being interrelated rather than additive, and they manifest themselves by dictating the space-time control points between which activities are undertaken to achieve predetermined goals (i.e., projects) (Carlstein 1978; Miller 1991; Neutens et al. 2007; Zillinger 2005).
Capability constraints address the physical limitation of individuals, such as those imposed by the need to eat or sleep. Suppose that a single offender were carrying out a succession of pickpocket acts across a given shopping district area. Then a key assumption would be that the offender has the capability, on foot or otherwise, to reach the different criminal opportunity points. Authority constraints reflect the influence of organizations external to the individual that control access to different places at different times (Ratcliffe 2006). Authority constraints refer specifically to levels of access at an individual level. For the rationalizing criminal, such as described by Clarke and Felson (1993), authority constraints play a prominent role in the decision making process leading up to an act of offense. Coupling constraints are recognized as the necessity of certain activities to form production, consumption, social, and miscellaneous activity bundles (Pred 1977). Practically, coupling constraints are defined by socially accepted modes of behavior such as shop operating hours or bus departure times. In order for a certain exchange to take place between two people, they must come together in time and space (e.g. a waiter taking an order from a customer). The concept of coupling constraint fits well with Cohen and Felson’s (1979) routine activities theory. To commit a given crime implies the ability to take advantage of a given opportunity for that crime. With certain exceptions (such as mail fraud or internet-based crime), criminal activities are bounded by the coupling constraint of the perpetrator and victim meeting in space and time. For instance, in order to steal a victim’s wallet, a pickpocket must be proximate, in both space and time, to the victim (e.g. on the same elevator or on the same street).
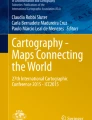
Cartographically, an implementation of the time-geographic framework takes place within a 3D (three-dimensional) map environment, where the third, vertical, dimension represents time (Fig. 15.1). Although the framework has developed a rich array of possible visual semantic symbologies, we will focus on the four fundamental ones: cube, point, path and prism.

Space-time cube with space-time paths
The space-time cube (Fig. 15.1) is used as a tool to represent the spatial two-dimensional (2D) axes, x and y, along with a third temporal axis, z. Empirical evidence suggests that the space-time cube representation is advantageous in conveying complex spatiotemporal data to users (Kristensson et al. 2008). Further, the space-time cube is capable of representing, simultaneously, the whole space-time continuum and the position of events in this continuum (Gatalsky et al. 2004).
There is very little mention of the space-time point as a construct in the time-geographic literature. Instead the space-time point is often seen as a necessary element in the construction of the space-time path. Miller (2004) refers to space-time points as control points and describes the space-time path (Fig. 15.1) as the linkage of a series of space-time points. However, in a case where we have no need, or are not interested in, particular path information, the 0-dimensional space-time point is all that is required (Hendricks et al. 2003). An individual’s space-time path is constructed by drawing straight lines connecting known space-time points such as those provided by travel-diary survey data (see Kwan 2000). The visual aspect of the space-time path concept represents an individual’s known trajectory illustrated on a two-dimensional plane. The space-time prism (Fig. 15.2) leads to the idea of the time budget, in which a person can move away from the start location, limited only by the maximum travel velocity and the next known point (Tessmann 2006). A space-time prism gathers all space-time paths an individual might have drawn during a specific time budget and delimits the feasible set of opportunities within a person’s reach (Dijst and Vidakovic 2000; Forer 1998). In theory, the prism is the intersection of two cones, called beads by Hornsby and Egenhofer (2002) and (Hariharan 1999). The lower cone represents the possible paths, referred to as potential paths, of travel from a given starting control point, while the upper cone represents the same path possibilities, in space-time, approaching the destination control point (Fig. 15.2).

Space-time prism (right bead)
Conceptually building on the space-time path constructed from two space-time points (x, y, t), Hariharan (1999) defines the apexes of a bead as either being collocated in space, but shifted in time (x0, y0, t0 and x0, y0, t1), or shifted by both space and time. As a further explanation, Hariharan (1999) explains that if the two space-time points are separated only by time then a right bead is formed. In this case the two half cones form a circle located in the plane
around the center
with a radius of
The projection of the right bead (prism) onto the 2D plane forms a circle. The other possibility, called an oblique bead (prism), is when the two space-time points are shifted by both space and time, or are not spatially aligned.
The area of the prism is termed the potential path space (PPS), and the projection of the oblique bead (prism) onto the 2D plane forms an ellipse, or potential path area (PPA) (Fig. 15.3).

Space-time prism (oblique bead)
The slope of the cone shows a given possible maximum velocity for the represented individual from a known point in space, while the space-time path indicates an individual’s activities in both space and time. The mathematical formulation for velocity is given as:
where || || is the vector norm or distance between the locations (x i , x j ). Placing Eq. (15.4) within the context of the prism represented in Fig. 15.2 we can see that this equation allows us to scroll through locations in the space–time path using time as an index (Miller 2005). Using the maximum velocity assumption (Wu and Miller 2001), we can then conceptualize how an offender’s potential path space, represented by the interior of the cone, intersects with a crime incident site x j , by showing all of the locations in space and time that the offender could have occupied during the time budget interval (t i , t j ). The range of offender travel capability then is constrained only by a defined maximum velocity, signified as v. This velocity is, mathematically, the subtraction of a known time segment, t j – t i , divided by the distance between known control points, x j – x i . The concept of velocity, expressed as PPA, is integral to a time-geographic approach. Therefore a potential path representation is used to show the points in space and time that the person could occupy during this travel episode (Miller 2005).
3 Usability Issues in Time-Geographic Visualizations
While there seems little doubt that a time-geographic visualization can contain much more information than a static, two-dimensional map, a map functions only if it communicates information. And frequently the barrier to a map communicating information is not that it contains too little information but that it contains too much (Gahegan 1999).
Therefore, before any recommendations can be made for applying time geography to crime mapping, time-geographic crime maps must be tested for their usability. In particular, crime maps are typically used for two functions: strategic and operational/tactical (Walsh and Ratcliffe 2005). A map that is so rich in information that it escapes comprehension by a practicing crime analyst is not useful for either function and, as Harrower et al. (2000) note, it is not uncommon for a map to be over engineered to a degree that it becomes difficult or impossible for use by a practitioner who has not undergone specialized training.
To investigate the applicability of time geography to crime mapping, this study relied on the history of subjecting both time-geographic and crime mapping methods to usability testing. Snook et al. (2007) and Paulsen (2006) have carried out map usability testing with police officers, asking them to mark an ‘X’ on the map where they thought that a serial burglar lived based on a 2D crime map pattern. Kristensson et al. (2008) have carried out usability testing comparing baseline 2D maps with 3D space-time cube maps. The Kristensson et al. (2008) test was conducted with an audience of novice users with the purpose of verifying the visual utility of the space-time cube.
The research reported in this chapter sought to combine the objectives of these two groups of tests, assessing the usability of 3D space-time cube maps for representing crime patterns and thereby testing the utility of the time-geographic framework for exploring crime events that occur at unknown points in space and time. The overall purpose of the study was to assess the practicality of using time geography within a crime mapping context.
Experts – both researchers and practitioners – were recruited based on their involvement in the crime mapping community, and testing was done in a manner consistent with methods that have been previously applied in usability studies evaluating the effectiveness of geovisualizaiton methods (Olson and Brewer 1997). Separate interviews were conducted with experts individually, thereby avoiding the influence of group opinion as might occur, for instance, in a focus group (Stewart and Shamdasani 1990). Participants were selected from two groups: practitioners (practicing crime analysts) and researchers (scholars with expertise in crime analysis, mapping, or both). Individual law enforcement agencies were contacted to set up interviews with practitioners, and additional practitioner interviews (as well as the interviews with researchers) were conducted at professional and academic conferences.
At each interview session participants were presented with a crime scenario (pickpocketing in a crowded shopping district) that assumes a single offender acting on two victims within a given range of time. While victim space and time paths were known and provided (as likely would be the case for investigators who were attempting to solve an actual crime), no offender data was given other than the constraint of velocity (which also mimics the circumstances of an actual crime investigation). The concepts of time geography were explained at the start and again as they were introduced during the exercise. The semi-structured interview consisted of cognitive walkthroughs through five map iterations of the same crime scenario. With each iteration the tools of time geography were further incorporated, with the final map incorporating many of the visualization techniques fundamental to time geography. At each iteration, participants were asked questions to test their understanding of the tools of time geography based on the visual representation of the map. Each interview lasted approximately 45 min.
4 The Usability Interview Process
The usability interview process consisted of a pretest briefing and the actual interview. At each session, the participant was presented with the crime in which incidents of pickpocketing were occurring while victims were moving through a crowded shopping district. The primary maps used in the interviews were developed within a hybrid-GIS environment combining a base map from desktop GIS (MapWindow) and a 3D modeling software (Google SketchUp). This map interface allowed for the interviewees to be able to interact with the 3D time-geographic maps through interactive tools such as pan, orbit and zoom.
The pretest briefing was meant to set up the actual interview. At the start of the interview the participant was categorized as a practitioner or researcher. Also, the participant was asked if he or she was familiar with the concepts of geographic profiling or crime pattern recognition. Next the participant was presented with some basic assumptions of the scenario or key facts of the case:
-
The maximum velocity for each map is set at 88 ft/min based on a leisurely pace in a crowded shopping district.
-
This area is approximately one half of a mile by one half of a mile wide.
-
Though this velocity is applied to the victim space-time path, it is also assumed to apply to the offender.
-
Therefore, a key assumption for these maps is that all three individuals – the two victims and the single offender – are traveling the same maximum velocity.
After the crime scenario and key facts were explained, the participant went through a semi-structured interview process conducted as a cognitive walkthrough, a usability testing method commonly used in engineering wherein a research subject has set goals, performs actions, and evaluates feedback (Polson et al. 1992). Each user was given a table of two known victim space-time points and a brief explanation of the visual tools of time geography to be utilized. Harrower et al. (2000), in conducting usability studies of cartographic interface tools, note that novel interfaces may not result in improved performance unless sufficient training is provided in how to use them. For some of the participants, particularly in the practitioner category, the concept of 3D time-geographic maps would be a new concept. Therefore, care was taken in explaining the time-geographic concepts, e.g. space-time cube, space-time path and space-time prism.
Once the pretest briefing was complete each interview commenced with an introduction to the first map. Set in the crowded and heavily touristed La Rambla shopping district of Barcelona, known as the pickpocketing capital of the world (Adams 2009), participants were presented with a scenario in which they were to assume that a single offender had picked the pockets of two victims within a given range of time. And while victim space and time paths were known and provided, no offender data was given other than the constraint of velocity. The concepts of time geography were explained at the start and again as they were introduced during the exercise.
With each map iteration the tools of time geography were further incorporated. Participants were asked questions throughout to test their understanding based on the visual representation of the map. During each map iteration participants were given both a paper color map and access to the computer-based map (laptop) with Google SketchUp. Also, the participant was given basic instruction on how to navigate the map interface (e.g. pan and orbit) by use of the mouse-computer interface. To structure the process the participants were asked to answer a set of questions and complete a specific task regarding each map as it was introduced.
The first map iteration (Fig. 15.4) utilized the 2D Flow Map containing point symbology at the known point locations for each victim along with directional flow arrow symbology indicators between known points. Participants were asked the following questions and instructed to complete the following task:

Flow map
- Question 1: :
-
Can you tell me what is going on in this map?
- Question 2: :
-
At what time do you think the two victims were at their closest?
- Task 1: :
-
Please circle the area on the map where you think the pickpocket operated out of based on the visual information provided in this map.
-
Follow up question to Task 1: How or why did you select this area?
-
Question 1 in this iteration was designed to acclimatize the participant to the map interface and cognitively connect the content of the pretest briefing to the map interface. Question 2 in this iteration was designed to engage the participant in the concept of space and time (or lack of) at the map interface. Essentially this question was not answerable by the map alone because time had not yet been visually incorporated into the map as is revealed in later iterations. Therefore, Task 1 in this iteration was meant to test the perceived usefulness and usability.
Next the participant was provided with the Potential Path Area Map containing the potential paths for the victims between known points based on the assumptions of the scenario (Fig. 15.5). At this point the concept of PPA was again briefly explained. The participant was then asked to answer the following questions and complete the following task regarding the map:

Potential path area map
- Question 1: :
-
What does this map add to better identify a search strategy for the offender?
- Question 2: :
-
At what time do you think the two victims were at their closest?
- Task 1: :
-
Please circle the area on the map where you think the pickpocket operated out of based on the visual information provided in this map.
-
Follow up question to Task 1: How or why did you select this area?
-
As was the case in the first iteration, the second question in this iteration was not actually answerable from this map, since time was not incorporated into the visualization. Thus, once again, the second question, as well as the task, were designed to test perceived usefulness and usability rather than the actual capacity of the map to communicate information.
Next the participant was provided the same Potential Path Area Map with only the intersections of the two victims (Fig. 15.6). This concept was briefly explained as a filtering, or a further illumination, of a certain aspect of the Potential Path Area Map. The participant was then asked to answer the following questions and complete the following task regarding the map:

Potential path area map intersections only
- Task 1: :
-
Please circle the area on the map where you think the pickpocket operated out of based on the visual information provided in this map.
-
Follow up question to Task 1: How or why did you select this area?
-
During the next iteration the participant was provided a Space-time Path Map incorporating the two victims’ paths in both space and time (Fig. 15.7). The concepts of space-time paths and space-time cubes were reiterated. Also, the participant was directed to utilize the mouse and interactive features of the 3D map within the computer-based map. The participant was then asked to answer the following questions and complete the following task regarding the map:

Space-time path map
- Question 1: :
-
What does this map add to better identify a search strategy for the offender?
- Question 2: :
-
At what time do you think the two victims were at their closest?
- Task 1: :
-
Please circle the area on the map where you think the pickpocket operated out of based on the visual information provided in this map.
-
Follow up question to Task 1: How or why did you select this area?
-
Question 1 in this iteration was again a question meant to illicit the participant’s perceptions of usefulness. However, question 2 in this iteration was designed as a direct test of usability, and was answerable, with some certainty, by interacting with the map interface since it now contained temporal information.
In the final iteration, the participant was provided with a map that replaced space-time paths with space-time prisms (Fig. 15.8). The concept of the space-time prism was reiterated. And again the participant was directed to utilize the mouse and interactive features of the 3D map within the computer-based map. The participant was then asked to answer the following questions and complete the following task regarding the map:

Space-time prism map
- Question 1: :
-
What does this map add to better identify a search strategy for the offender?
- Question 2: :
-
At what time do you think the two victims were at their closest?
- Task 1: :
-
Please circle the area on the map where you think the pickpocket operated out of based on the visual information provided in this map.
-
Follow up question to Task 1: How or why did you select this area?
-
Finally, the participant was asked an open ended question meant to asses satisfaction and potential utility (usefulness) of the tools of time geography:
- Final Question: :
-
Are these types of tools practical in your job or research?
During this interview there were five map iterations (Figs. 15.4, 15.5, 15.6, 15.7, and 15.8 ), and with each map iteration the participant was asked to develop a search strategy to reveal the location of the offender. And though it is impossible to know for sure where the offender carried out the crime, a search strategy, it was explained, in this case represented a hypothesis of where the offender’s base of operations was. To assist the participants when developing their search strategies, verbal cues were given throughout that would assist the participant in connecting the exercise with practical decision making that occurs when one is attempting to thwart or catch offenders, such as selecting a location for police patrols or installation of security cameras. Thus each participant generated five different search strategies by circling areas on the map, with each subsequent search strategy being supplemented by increased utilization of the tools of time geography.
5 The Usability Interview Results
The time-geographic tools provided an ability to represent individual contextual factors such as victim speed constraints, while the street map itself represented environmental and place-based context such as street layout and building locations. What could not be represented by the maps was the unknown, which was in this case the actual location of the crimes and the offender. It was left to the map user (the interviewee) to draw conclusions about the unknown (offender data) from the known (victim data and the time-space constraints of the geographic environment).
5.1 Locating Space on a Time Geography Map
At each iteration in the interview, participants were asked to develop a search strategy for a single offender by circling an area on the map. Often the participants wanted to select multiple areas but they were encouraged to try to limit their selection to a single best search strategy area. Equally relevant were the reasons cited for making their search strategy selections. It is interesting to note that most participants modified their search strategy areas as each new map, and hence an additional time-geographic tool, was introduced. However some participants felt strongly about their previous choices and tried to stick as closely as possible to those choices, even when confronted with new data.
In the series of maps that follow (Figs. 15.9, 15.10, 15.11, 15.12, and 15.13), the areas that participants selected have been generalized to areas indicated by capital letters. On each map, the associated pie chart shows the percentage of participants who selected each area. While most participants when presented with this simple flow map (Fig. 15.4) relied on map symbology (the directional arrows) in reaching their recommendations for a search strategy, some of the participants focused more on the environmental and situational context to develop their search strategies. For instance, four of the practitioner participants justified their search strategies by noting that a pickpocket would likely frequent a university or market area (areas D, C, or E on Fig. 15.9). One of these participants stated, “I am looking strongly at the built areas and the influence on the likelihood of the crime. For example the market area is likely to have a lot of opportunities for distraction.” However the majority of participants (63%) identified the location where the two victims’ paths crossed (area A) as the most likely candidate for the offender’s base of operations.

The search strategy areas selected by participants from the flow map
With the introduction of the PPAs to the map, participants became less certain that the area where the two victims’ paths crossed (area A) was the best place for a search strategy, although it remained the predominant choice (Fig. 15.10). Again, several of the participants, in particular those who were practitioners, cited environmental factors in selecting their search strategies. One participant, calling the PPA intersections “convergences,” commented, “Given the area of convergence I am thinking that [around] the Galleria area that is open and the offender could have had more opportunity. The offender could see more about where the victims were coming and going.” This trend might best be explained by specific knowledge gained from experience of seeing how crime is actually carried out within context. This same participant went on to comment about the limited way in which time was represented on this map: “Time and space are important in geographic profiling to locate the most likely area at which the victim and offender will meet with an opportunity. But, I don’t see time here as of yet.” The participant is correct to note that time had not yet been explicitly represented in the map. However, the PPAs themselves were explained as being based on the speed of travel and amount of time between two known points. The introduction of PPAs definitely gave the participants more to consider in developing their search strategies. Another participant noted that the PPAs told him more about where the victims might have spent time in a common area, or near each other. And, another participant commented, “… the narrower the PPA there is likely to have been a choke point forcing them into a likely crowded area and increasing vulnerability to pick pocketing.”

The search strategy areas selected by participants from the potential path area map
One of the challenges with visually analyzing the PPA map is in discerning the different PPA intersections. One participant replied that he reached his search strategy choice “… by looking at the intersecting circles.” But he followed up this answer with, “Actually there are bunches of intersecting PPAs so this does get a little confusing. I was influenced by the original intersection [when I was viewing the Flow Map] but now I am reconsidering. Along the edges the offender would be able to isolate the victims. If I was going to allocate foot patrol officers I would consider that they get bored very easily patrolling in a small area. I would choose a larger area of intersection.” And another participant remarked, “I am still most certain about the crossing paths (area A) but with the intersecting PPAs. Also, I am considering this road [La Rambla] and am assuming it is a busy road with a lot of traffic.” These quotations reveal a desire to supplement incomplete (or, perhaps, confusingly presented) time-geographic information with contextual data.
Anticipating the challenge of discerning the different PPA intersections, the next map iteration (Fig. 15.11) removed all of the PPA information except for the intersections. This map drew the participants’ attention more toward the areas of densest PPA intersection such as areas A and E. Area E definitely seems to have the tightest intersections and some participants noted this. One participant remarked, “The areas with the tighter intersections (smaller) also become[s] an area of interest.” But still other participants felt strongly persuaded by their original line of reasoning, with one saying “… with this one it is still close to the market but the intersections move me a little bit.”

The search strategy areas selected by participants from the potential path area intersections map
The next iteration (Fig. 15.12), along with the addition of 3D, introduced explicit time data that had been noticeably missing from the previous maps (as one participant noted during the previous iteration, “If I knew a range of times then I could rule out places where they were too far apart”), and it was anticipated that this new data might lead to a radical shift in participants’ search strategies. Because of the addition of 3D, at this point participants were encouraged to interact with the map via the computer mouse. Now the participants were using the interactive tools of orbit, pan and zoom to visually inspect the space-time paths.

The search strategy areas selected by participants from the space-time path map
The addition of time onto the map interface was a new concept to some participants. One practitioner participant noted, “This is interesting! I am not used to seeing time in a map in this way. What I am used to is time as a bar chart or histogram that accompanies the map. This is quite different!” The resulting search strategies coming out of the introduction of the space-time paths drew some participants more towards area C. Likely more influential at this area than the Gallerias is the fact that participants were attempting to see the location on the ground (the 2D map) where the space-time paths appeared to be at their closest. Most participants did this by orbiting to a top-view of the map and attempting to see where the two space-time paths were at their closest. This was in fact area C, and indicates positive usability of the space-time paths.
With the final map iteration, the Space-Time Prism Map (Fig. 15.13), participants were offered a chance to select a new search strategy. And while some participants were not swayed from their previous selections the plurality of participants (42%) selected Area B, which had rarely been selected on any of the previous four maps. Though some expressed a challenge in doing so, participants who selected this area did so by orbiting the map to realize the area where the prisms intersected on the ground (the 2D map).

The search strategy areas selected by participants from the space-time prism map
As it turns out, Area B is indeed the location at which the two victims were at their closest in space and time (Fig. 15.14). And so, based solely on the metric of distance and known information, the correct area was found by 42% of the participants (in contrast with the original, more conventional flow map which led to a correct choice by only 5% of the participants). One practitioner participant in selecting Area B noted, “It looks like this is where the two cones are closest together,” demonstrating an awareness of the concepts embodied in the space-time prism map as well as an ability to read it as a visualization.

Area where two victims were at their closest in space and time
However some participants expressed frustration with this map’s usability and, therefore, its usefulness. One participant noted, “This is difficult for a layperson to utilize these tools.” Additionally, some participants noted a particular challenge in cognitively connecting the prisms to the 2D map. One practitioner participant noted while panning and orbiting that he was interested particularly in the area of intersection of the prisms “… but I don’t know how to show it on the map. It is difficult to get from the space-time prism to the map. The victimized area should be in the vicinity of the intersection of the prism.” Still another researcher participant, with a professional background in emergency management, clearly stated that he felt the 3D environment was too complex for mapping crime events saying, “I feel like a 2D environment would be more efficient. When looking at a crime event you have to act rapidly and this is too complex for that. The 2D could depict the same if you labeled the time at the points.”
Finally, some participants, particularly those focusing on environmental context, continued with a search strategy that focused on the market areas or what they perceived to be busy thoroughfares. These participants seemed to be drawing on their experience or knowledge about crime. As one participant noted regarding his search strategy selection, “An offender operates in a place where he can victimize someone as they are leaving the shopping area. The offender can then move on the next potential victim. You don’t want all of the victims coming together at once.” The reality is that even with the constraint of similar velocity to the victims the offender’s potential paths could have overlapped the victims’ in many different areas. Therefore, a single correct answer to the best search strategy was not really possible. And it was very informative from both a crime mapping and time-geographic perspective to hear the researcher and practitioner participants’ feedback regarding what they thought were the best search strategies.
5.2 Locating Time on a Time Geography Map
During the usability interviews participants were shown first a space-time path map and then a space-time prism map. Participants were then tasked with locating the time at which two victims, represented in the maps, were at their closest. With the addition of the space-time prism, participants should have been able to conclude an answer in the range of 12:25 and 12:30. During this iteration participants were encouraged to interact with the map through the available tools (pan, orbit and zoom) which were required to answer this question with certainty through visual inspection. This certainty would come only from visual inspection of the only intersection of the two space-time paths by the two represented victims (Fig. 15.15).

The space-time prism intersection that can be found only by map interaction
And while some participants answered by selecting a certain narrow time range, others selected a wider range signifying the uncertainty of their answers. The results in Fig. 15.16 illustrate a notable difference between the researchers and the practitioners with regard to perspective usability of the space-time prisms to tell the time at which the two victims were at their closest.

The participant space-time prism selections
Any selected time between the 12:25 and 12:30 range indicates a correct reading, and positive usability, of the space-time prisms. Any selected time outside of the 12:25 and 12:30 range indicates a lack of usability. This usability was dependent, of course, on the user’s ability to utilize the space-time prism as a tool. Six of the nine researchers (66%) were able to use the space-time prism to locate the time at which the two victims were at their closest. However, only two of the ten practitioners (20%) demonstrated this ability. The standard deviation for the practitioners was 7.061 compared to the researchers’ 5.617 (denoted by lower case Greek letter sigma, σ). This difference in results may be accounted for by the fact that researchers were more likely to have been exposed previously to alternative methods of mapping (e.g. 3D maps). Practitioners were more likely to have only been exposed to mainstream commercial GIS products and processes. One practitioner interviewed at a large metropolitan police department remarked when introduced to space-time paths and prisms that “this is something quite different than we are used to … we are point people.” On further clarification the practitioner explained that it is the standard on her police department’s crime mapping team to represent crimes primarily as dots on a map and that time-geographic crime maps were a novel idea.
During each map iteration the participants were asked the question, “At what time do you think the two victims were at their closest?” For the first two maps, the 2D Flow Map (Fig. 15.4) and the Potential Path Area Map (Fig. 15.5), the question was not answerable based solely on the visual information represented on the map. However, this question was asked in order to gauge the participants’ understanding of the map area and to see their thought process as it related to incorporating temporal questions into the map. During the asking of this question the participants were given a hint that the question was not answerable by emphasizing that their assessment should be made using “the visual information presented in this map.” Absent from the Flow Map were any time labels. In retrospect the addition of time labels into the 2D maps might have been useful. However, they were left out because the temporal axis had not yet been introduced. Nonetheless, an interesting result of this question was that most of the participants were drawn early on to the intersection of the 2D paths from the Flow Map as their choice of the area where the two victims were at their closest regardless of the fact that they had no data to support this conclusion (Fig. 15.17). One participant on introduction to the Flow Map remarked with certainty about where the victims were at their closest, “I would say where they crossed paths!”.

Victim paths that cross in space, but not necessarily time
Upon further consideration, and as the interviews progressed, most participants realized that they could not conclude with certainty, from the 2D maps, that the victims were at the closest at the 2D intersection. One practitioner participant noted, “At a glance you can’t tell what time they were at their closest. Intuitively I want to say they were moving from different start points moving at the same speed, but you can’t really tell for sure.” Though the questions were asked with the map as the focus the participants still had access to the tabular data from the pretest briefing which was the known victim space-time point data. And some participants referred back to this data but noted that it would take some time to correlate the tabular data with that presented on the 2D flow map to determine the point at which the two victims were at their closest.
6 Conclusion and Research Implications
A key factor in testing the usability of the maps within this chapter is the determination of whether the 3D time-geographic approach can reveal patterns where traditional 2D GIS methods usually cannot. To this end it seems natural to correlate the goals of geographic profiling with those of geographic visualization. MacEachren (2001) describes geographic visualization as the use of visual geospatial displays to explore data and through that exploration to generate hypotheses, develop problem solutions, and construct knowledge. This description correlates well with the objective of geographic profiling as a criminal investigative technique that attempts to provide information on the likely “base of operations,” or offender residence, of offenders thought to be committing serial crimes (Harries 1999; Rich and Shively 2004; Rossmo 2000).
A primary assumption of a geographic profile is that the offender’s base of operations lies within the distribution of crime incident sites (Rossmo 2000). Combining the concept of anchor points with the crime triangle of routine activities theory, a crime event occurs when both the victim and offender are within proximity to the offender’s anchor point. Further placing these concepts within a time geography framework, an anchor point will lie within a given victim’s space-time prism (potential paths) along his or her space-time path (known paths). Therefore, time geography can lend itself to helping to incorporate time explicitly (and visually) into developing geographic profile search strategies. Snook et al. (2007) have found that with appropriate training police investigators could be as accurate in their predictions as actuarial driven computer predictions of crime areas (see also Paulsen 2006). Potentially, the human deductive element in crime analysis could be further enhanced through engagement with advanced visualization techniques. However, at some point, as visualization systems become ever more complicated, the system becomes unusable to all but the most highly trained professional. Through an investigation of the usability of time-geographic crime visualizations, this chapter has suggested that limits do exist, but they are surmountable. Certainly many of the respondents – especially those who were practicing crime analysts rather than academics who were more accustomed to time-geographic visualizations – were uncomfortable with some of the more sophisticated maps. However, the fact that so many of them were able to use even the most complex time-geographic map correctly suggests that, with training, these visualization techniques could achieve large-scale adoption by the crime-mapping community.
The potential application of time-geographic and associated space-time analysis methods to crime mapping should be bolstered by advances in technologies such as satellite navigation systems and land-based navigation systems. For instance, in a related vein of research, recent strides have been made in developing methods that utilize global positioning systems (GPSs), along with time-geographic methods, to study pedestrian movement patterns in urban spaces such as tourist centers (Pettersson and Zillinger 2011; Shoval and Isaacson 2006; van der Spek et al. 2009). The findings from this research on pedestrian movement, along with the usability findings presented in this chapter, suggest that the potential contributions of time geography extend beyond crime mapping to a range of human mobility activities.
By including the variable of time explicitly within the map space, time geography adds certain contextual factors as it maps elements of human activity spaces that typically are absent in mapping. And the construction of the time-geographic tools is informed by context through the application of constraints. Additionally, recent efforts to account for such factors as varying velocities between known space-time points are adding to the potential ways in which time-geographic tools can be applied (Miller and Bridwell 2009). Still, despite the innovate approach of time geography to the process of map design, the technique remains vulnerable to the pitfalls of generalization that are faced by all forms of cartographic representation. This generalization is required because all maps are smaller (and necessarily less complex) than the realities they represent (Monmonier 1996).
While many participants in the usability study conducted in this chapter found the tools of time geography (e.g. the space-time prisms) to be usable in map reading, others (primarily in the practitioner group) found them less useful and preferred to focus on environmental context factors such as nearness to market areas. These participants felt that context was an equally or more important consideration in selecting their search strategies than the metrical distances that could be calculated between two victims’ space-time paths. For instance, one practitioner participant noted that it would be helpful to see how many other people (non-victims) were present in each area of the study space. The importance of the difference between seeing movement as an abstract mathematical phenomenon and seeing it as an embodied practice performed by environment-interpreting agents (both offenders and victims) was not lost on these participants.
The enduring importance of spatial context leads us back to Lynch’s (1960) focus on the influence of (city) form and cognition on human activity. Arguably the participants in the map usability study who focused on context (e.g. the market as a site conducive to pickpocketing activity) over metrical space (e.g. the point in time and space at which the victims were at their closest) were influenced more by their perceptions of urban form. People’s perceptions of space, and in turn, their behavior therein, are strongly influenced by their mental images of what different localities mean to them (Lynch 1960; Buttimer 1980; Cosgrove 1984). Some participants expressed a strong interest in what they perceived as particular spatial contexts that were relevant to a pattern of crime. And the influence of urban form on patterns of crime is clearly communicated in Brantingham and Brantingham (1991) theory of environmental criminology. Indeed, regardless of time geography’s potential utility in crime mapping and investigation, this study also reinforces the findings of critical cartographic theorists (e.g. Del Casino and Hanna 2005; Kitchin and Dodge 2007) that a map, when considered as an object, can never fully capture the cognitive feedback loop between perception and practice. As long as this limit remains (which we believe will be the case for the foreseeable future), no map will ever achieve complete reliability in modeling the experience (and hence the geography) of the crime event, as practiced by the opportunity-seeking offender. Nonetheless, by incorporating time into a form of visualization that can be used by the crime analyst, time geography provides an innovative and potentially practicable tool for those who wish to understand – and intervene in – the spatial patterns and processes of criminal activities.
References
Adams B (2009) Barcelona “worst city for pickpockets”. http://www.telegraph.co.uk/travel/travelnews/6229558/Barcelona-worst-city-for-pickpockets.html. Last updated on 25 Sep 2009
Brantingham PJ, Brantingham PL (1991) Environmental criminology. Waveland Press, Prospect Heights
Brantingham PL, Brantingham PJ (1993) Nodes, paths and edges: considerations on the complexity of crime and the physical environment. J Environ Psychol 13:3–28
Brunsdon C, Corcoran J, Higgs G (2005) Visualising space and time in crime patterns: a comparison of methods. Comput Environ Urban Syst 31:52–75
Buttimer A (1980) Home, reach and the sense of place. In: Buttimer A, Seamon D (eds) The human experience of space and place. St. Martin’s Press, London
Carlstein T (1978) Innovation, time allocation and space-time packing. In: Carlstein T, Parkes D, Thrift N (eds) Timing space and spacing time, vol. 2, human activity and time geography. E. Arnold, New York
Chainey S, Tompson L, Uhlig S (2008) The utility of hotspot mapping for predicting spatial patterns of crime. Secur J 21:4–28
Clarke RV, Felson M (1993) Routine activity and rational choice. Transaction, New Brunswick
Cohen L, Felson M (1979) Social change and crime rate trends: a routine activities approach. Am Sociol Rev 44:588–608
Cosgrove D (1984) Social formation and symbolic landscape. Croom Helm, London
Del Casino VJ, Hanna SP (2005) Beyond the “binaries”: a methodological intervention for interrogating maps as representational practices. ACME An Int E-J Crit Geogr 4:34–5
Dijst M, Vidakovic V (2000) Travel time ratio: the key factor of spatial reach. Transportation 27:179–199
Felson M, Clarke R (1998) Opportunity makes a thief: practical theory for crime prevention, police research series paper 98. Home Office, Policing and Reducing Crime Unit, Research, Development and Statistics Directorate, London
Forer P (1998) Geometric approaches to the nexus of time, space, and microprocess: implementing a practical model for mundane socio-spatial systems. In: Egenhofer MJ, Golledge RG (eds) Spatial and temporal reasoning in geographic information systems. Oxford University Press, New York
Gahegan M (1999) Four barriers to the development of effective exploratory visualization tools for the geosciences. Int J Geogr Inf Sci 13:289–309
Gatalsky P, Andrienko N, Andrienko G (2004) Interaction analysis of event data using space-time cube. In: Banissi E et al (eds) IV 2004. 8th international conference on information visualization, proceedings, London, UK, 14–16 July 2004. IEEE Computer Society, Los Alamitos, pp 145–152. ISBN 0-7695-2177-0, ISSN 1093-9547
Grubesic TH, Mack EA (2008) Spatio-temporal interaction of urban crime. J Quant Criminol 24:285–30
Hägerstrand T (1970) What about people in regional science? Papers of the Regional Science Association. Sci Assoc 24:7–21
Hariharan R (1999) Modeling intersections of geospatial lifelines. Master’s thesis, Pennsylvania State University College of Information Sciences and Technology
Harries K (1999) Mapping crime: principles and practice. National Institute of Justice, Washington, DC
Harrower M, MacEachren MA, Griffin AL (2000) Design and assessment of geographic visualization tool to support earth science learning. Cartogr Geogr Inf Sci 27:279–293
Hendricks M, Egenhofer MJ, Hornsby K (2003) Structuring a wayfinder’s dynamic space-time environment. Lect Notes Comput Sci 2855:75–92
Hornsby K, Egenhofer M (2002) Modeling moving objects over multiple granularities. Ann Math Artif Intell 36(1–2):177–194
Hubers C, Schwanen T, Dijst M (2008) ICT and temporal fragmentation of activities: an analytical framework and initial empirical findings. Tijdschr Econ Soc Geogr 99:528–54
Kitchin R, Dodge M (2007) Rethinking maps. Prog Hum Geogr 31:331–44
Knox G (1964) The detection of space-time interactions. Appl Stat 13:25–29
Kristensson PO, Dahlback N, Anundi D, Bjornstad M, Gillberg H, Haraldsson J, Martensson I, Nordvall M, Stahl J (2008) The trade-offs with space time cube representation of spatiotemporal patterns. Department of Computer and Information Science, Linkoping University. http://arxiv.org
Kwan M-P (2000) Interactive geovisualisation of activity-travel patterns using three-dimensional geographical information systems: a methodological exploration with a large data set. Transp Res 8:185–203
Kwan M-P, Lee J (2004) Geovisualization of human activity patterns using 3D GIS: a time-geographic approach. In: Goodchild MF, Janelle DG (eds) Spatially integrated social science. Oxford University Press, New York
LaVigne NG, Fleury JK, Szakas J (2000) Auto theft and detecting chop shop locations. In: Turnbull LS, Hendrix EH, Dent BD (eds) Atlas of crime: mapping the criminal landscape. Oryx Press, Phoenix
Leitner M, Kent J, Oldfield I, Swoope E (2007) Geoforensic analysis revisited: the application of Newton’s geographic profiling method to serial burglaries in London, UK. Police Pract Res Int J 8:359–370
Levine N (2010) CrimeStat: a spatial statistics program for the analysis of crime incident locations (v 3.3). Ned Levine & Associates/National Institute of Justice, Houston/Washington, DC
Lynch K (1960) The image of the city. MIT Press, Cambridge
MacEachren AM (2001) Cartography and GIS: extending collaborative tools to support virtual teams. Prog Hum Geogr 25:431–444
Miller HJ (1991) Modeling accessibility using space-time prism concepts within geographical information systems. Int J Geogr Inf Syst 5:287–301
Miller HJ (2004) Activities in space and time. In: Stopher P, Button K, Haynes K, Hensher D (eds) Handbook of transport 5: transport geography and spatial systems. Elsevier, Amsterdam/London
Miller HJ (2005) A measurement theory for time geography. Geogr Anal 37:17–45
Miller HJ, Bridwell SA (2009) A field-based theory for time geography. Ann Assoc Am Geogr 99:49–75
Monmonier MS (1996) How to lie with maps. University of Chicago Press, Chicago
Neutens T, Witlox F, Van de Weghe N, De Maeyer P (2007) Human interaction under uncertainty. Transp Res 7:335–352
Newton MB (1988) Geographical discovery of the residence of an unknown dispersing localized serial murder. Unpublished Manuscript, Louisiana State University
Olson JM, Brewer CA (1997) An evaluation of color selections to accommodate map users with color-vision impairments. Ann Assoc Am Geogr 87:103–134
Paulsen D (2006) Human versus machine: a comparison of the accuracy of geographic profiling methods. J Investig Psychol Offender Profil 3:77–89
Pettersson R, Zillinger M (2011) Time and space in event behaviour: tracking visitors by GPS. Tourism Geogr Int J Tour Space Place Environ 13:1–20
Polson P, Rieman J, Wharton C, Olson J, Kitajima M (1992) Usability inspection methods: rationale and examples. In: The 8th human interface symposium (HIS92). Kawasaki, Japan, pp 377–384
Pred A (1977) The choreography of existence: comments on Hägerstrand’s time-geography and its usefulness. Econ Geogr 53:207–221
Ratcliffe JH (2006) A temporal constraint theory to explain opportunity-based spatial offending patterns. J Res Crime Delinq 43:261–291
Rich T, Shively M (2004) A methodology for evaluating geographic profiling software. Abt Associates, Cambridge
Rossmo DK (2000) Geographic profiling. CRC Press, Boca Raton
Schmertmann CP, Assunção RM, Potter JE (2010) Knox Meets Cox: adapting epidemiological space-time statistics to demographic studies. Demography 47:629–650
Shoval N, Isaacson M (2006) The application of tracking technologies to the study of pedestrian spatial behaviour. Prof Geogr 58:172–183
Snook B, Haines A, Taylor PJ, Bennell C (2007) Criminal profiling belief and use: a study of Canadian police officer opinion. Can J Police Secur Ser 5:169–179
Stewart DW, Shamdasani PN (1990) Focus groups: theory and practice. Sage, London
Tessmann S (2006) Time geography for efficient shared-ride trip planning in transportation networks. Diploma thesis, Institute for Geoinformatics, University of Münster, Germany. Retrieved from http://www.psu.edu/
van der Spek S, van Schaick J, de Bois P, de Haan R (2009) Sensing human activity: GPS tracking. Sensors 9:3033–3055
Walsh P, Ratcliffe JH (2005) Strategic criminal intelligence education: a collaborative approach. J Int Assoc Law Enforc Intell Anal 16:152–166
Wu Y, Miller HJ (2001) Computational tools for measuring space-time accessibility within transportation networks with dynamic flow. J Transp Stat 4:1–14
Zillinger M (2005) A spatial approach on tourists’ travel routes in Sweden. Etour, Östersund
Acknowledgements
This research was funded by National Science Foundation Doctoral Dissertation Research Improvement grant no. 0927850.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Morgan, J.D., Steinberg, P.E. (2013). Testing the Usability of Time-Geographic Maps for Crime Mapping. In: Leitner, M. (eds) Crime Modeling and Mapping Using Geospatial Technologies. Geotechnologies and the Environment, vol 8. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-4997-9_15
Download citation
DOI: https://doi.org/10.1007/978-94-007-4997-9_15
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-4996-2
Online ISBN: 978-94-007-4997-9
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)