
Abstract
For high speed control of Bearing Less Switched Reluctance Motor (BSRM), the torque and radial force has to be decoupled. A novel Permanent magnet pole shoe type based suspension poles is proposed for a 12/14 BSRM, to decouple suspension force and radial torque and also radial forces generated in x and y-axis. A pole shoe type permanent magnet made of Neodymium Magnet, which is an alloy of Neodymium, iron and boron material (NDEFB) is placed on the all four suspension poles. The selection of pole shoe is taken according to force required to levitate the rotor mass in air gap. The width and arc are taken without disturbing the self starting phenomena of rotor. When the motor is excited, the flux distribution in the air gap under phase A is short flux path and there is no flux reversal in the stator core. This will decrease saturation effect and the MMF required producing motoring torque which decreases core losses. The decoupling of radial force and motoring torque are achieved and the decoupling of radial force in positive and negative x and y directions is achieved. The performance of the proposed motor is compared with 12/14 conventional BSRM model and the results are presented and analysed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
BSRM has good performance under special environments such as fault tolerance, robustness, tolerance of high temperature or in intense temperature variations [1]. BSRM has two types of stator windings consists of motor main windings or Torque windings and radial force or suspension force windings in the stator to produce suspension force that can realize rotor shaft suspension without mechanical contacts [2–5]. Recently, several structures of bearing less switched reluctance motor (BSRM) have been proposed. According to size of suspension pole and torque pole to get the self starting of motor and improvements in decoupling between suspension force and motor torque. All the above performances are achieved by implementing novel 12/14 BSRM [6–8]. With the novel winding arrangement and pole structures, the short flux paths with no reversal of flux paths are achieved compared with conventional 12/8 BSRM pole structure [9].
In 12/14 BSRM suspension winding the main tasks is levitation of rotor in air gap at the time of motor starts. It requires the DC excitation on all four suspension poles. Second thing is control the rotor position to its axis point when the rotor center axis point is changed due to change in loads and disturbances. With the single winding on suspension pole it has to do the above mentioned tasks at the same instant, so it is very difficult to get independent control of position and levitation [10–13].
A pole shoe type permanent magnet an alloy of Neodymium, iron and boron material (NDEFB) material is placed on the all four suspension poles. The performance of the proposed model is compared with novel 12/14 BSRM at same excitation levels without changing the winding pattern and switching supply. When the motor is excited, the flux distribution in the air gap under phase A is short flux path and there is no flux reversal in the stator core. This will decrease saturation effect and the MMF required producing motoring torque these leads to lower core losses. The radial force and motoring torques are taken for all positive and negative directions of both X-axis and Y-axis. As compare with 12/14 BSRM model, the proposed model shows better uniform flux patterns and simple controlling of rotor position and levitation of rotor with less value of currents. The decoupling of radial force and motoring torque are achieved and the decoupling of radial force in positive x and negative x directions similarly radial force in positive y and negative y directions are achieved.
2 Proposed Bearingless Motor
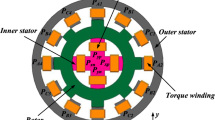
The hybrid stator pole structure of 12/14 BSRM is shown in Fig. 1. In general, any BSRM model consists of both torque and suspending force poles on the stator only. The rotor does not consist of any windings; it is a simple solid iron core with the salient poles. Figure 1 shows four suspension poles Sx1, Sx2, Sx3 and Sx4 are individually excited. Four torque poles i.e. TA1, TA2, TA3 and TA4 are connected in series to construct phase A, and remaining four torque poles TB1, TB2, TB3 and TB4 are connected in series to construct phase B. X-directional suspending force is controlled by the winding currents in Sx2 and Sx4 stator radial force poles. Similarly Y-directional suspending force is controlled by controlling the winding currents in Sx1 and Sx3. In order to get a continuous suspending force, the suspending force pole arc is selected to be not less than one rotor pole pitch.

Winding diagram of 12/14 BSRM
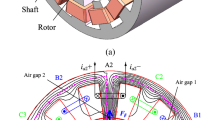
The magnetic flux is generated when x-axis suspension winding current is excited. It can be seen that the flux density in the air gap 1 is increased; because of the direction of the Permanent Magnet flux from pole shoe is in the same direction as the suspension magnetic flux. At the same instant the flux density in the airgap2 is decreased, as the direction of Permanent Magnet flux is opposite to that of the suspension magnetic flux. Therefore, this overlaid magnetic field results in the radial suspension force Fx acting on the rotor toward the positive direction in the x-axis. A radial suspension force toward the negative direction in the x-axis can be produced with a negative current. Similarly, the principle can be applied to the Y-axis also.
A pole shoe type permanent magnet is placed on all suspension poles to levitate the rotor. The selection of pole shoe is taken according to force required to levitate the rotor mass in air gap. The width and arc are taken without disturbing the self starting phenomena of rotor.
This hybrid stator model exhibits linear characteristics with respect to rotor position, because of the independent controlling between motor torques and suspending force poles. This model can effectively decouple the torque from the suspension force. The output torque is considerably enhanced because of the small flux path without any flux reversal, and also it is simple to control the air-gap. The inductance of suspending winding is almost constant due to that pole arc of suspending stator is equal to one rotor pole pitch. Therefore, for the toque design, it can refer to the conventional single-phase SRM. The 3-D FEM Model is shown in Fig. 2. When ignoring fringing effect and saturation effects, the inductance may be explained as:

3D fem model
Consequently, the torque T in this pole can be explained as follows:
Based on the FEM analysis, the net suspending force produced by proposed BSRM and is given in Eq. (3).
3 Results and Discussions
Figure 3 shows the flux distribution of the permanent magnet pole shoes on suspension poles. The magnetic force produced from the permanent magnet to levitate the rotor is =56N. The peak value of flux density in air gap from permanent magnet is 0.879T.

Magnetic flux distribution pattern from PM suspension poles
Figure 4a shows the Field distributions of four pole suspension poles produced by the four pole suspension windings. Figure 4b shows the instantaneous energy and co energy productions by suspension windings. By Finite–Element method, the suspension force computed is Fx = 5N and Fy = 106N, and the maximum value of flux density in air gaps is about 1.2T. The maximum magneto motive force from each suspension poles is about 160AT.

a Magnetic flux distributions of excited suspension poles. b Instantaneous energy and co energy due to suspension poles with PM pole shoes
Figure 5 shows the flux distributions of phase A with short flux paths, without reversal of flux paths at constant load. In order to get easy analysis only phase A is considered.

Short flux paths of phase A
The Fig. 6, shows that at constant load, the suspension force produced from suspension stator windings Sx1 and Sx2 windings is independent to each other in X and Y directions i.e. the decoupling between x-axis suspension force and y-axis suspension force is possible. Figure 7 shows the flux linkages of motoring coils and Fig. 8 shoes the flux linkages of suspension coils. Fig. 9 shows the variation of instantaneous magnetic energy and co energy. From Fig. 10, the force produced from suspension coils and torque produced from torque windings are independent at any time of operation of motor. Table 1 shows the comparison of conventional and proposed BSRM.

Suspension force produced in x and y directions

Flux linkages of motoring coils

Flux linkages of suspension coils

Instantaneous magnetic energy and co energy
From the Fig. 10, the force produced from suspension coils and torque produced from torque windings are independent at any time of operation of motor. Because of the saliency of both stator and rotor of the BSRM, the distribution of the magnetic flux and electric field in air gap is varied with the position of the rotor. For the proposed BSRM, Several important positions are chosen to compare the FEM analysis results with conventional 12/14 BSRM. The distribution of magnetic flux in both the models has the short flux paths and there is no flux reversal in air gap. Due to short flux paths produced from Phase and phase B, the saturation and core losses are reduced. As compare with conventional model the proposed model shows better independent control of radial force in x-axis and y-axis directions. The force required for the levitation of rotor is achieved at just 2A of suspension winding currents due to PM Pole shoe on suspension poles. But in case of conventional 12 × 14 BSRM the current required is 4A to levitate the rotor in air gap.

Force and torque
4 Conclusion
In this paper, permanent magnet pole shoes on suspension poles are introduced to make levitation and positions of rotor simple. Flux distributions, radial forces of all suspension coils and motoring torque produced from torque windings are analyzed based on finite element method (FEM). The saturation effect is reduced due to short flux path and there is no reversal of flux under both the phases. Decoupling of positive x and negative x directions of radial force are achieved. Only 2A is sufficient to levitate the rotor for suspension windings with the aid of PM Pole shoe flux.
References
R. Krishnan, R. Arumugan, J.F. Lindsay, Design procedure for switched-reluctance motors. IEEE Trans. Ind. Applicat. 24, 456–461 (1988)
M. Takemoto, K. Shimada, A. Chiba, T. Fukao, A design and characteristics of switched reluctance type bearing less motors, in Proceedings of 4th International Symposium Magnetic Suspension Technology, vol. NASA/CP-1998-207654, May 1998, pp. 49–63
Z. Xu, D.-H. Lee, J.-W. Ahn, Modeling and Control of a Bearingless Switched Reluctance Motor with Separated Torque and Suspending Force Poles
Z. Xu, F. Zhang, J.-W. Ahn, Design and Analysis of a Novel 12/14 Hybrid Pole Type Bearingless Switched Reluctance Motor
H. Wang, Y. Wang, X. Liu, J.-W. Ahn, Design of novel bearingless switched reluctance motor. IET Electr. Power Appl. 2, 73–81 (2012)
Z. Xu, D.-H. Lee, J.-W. Ahn, Control characteristics of 8/10 and 12/14 bearingless switched reluctance motor, in The 2014 International Power Electronics Conference
Z. Xu, D.-H. Lee, J.-W. Ahn, Comparative analysis of bearingless switched reluctance motors with decoupled suspending force control. IEEE Trans. Ind. Appl. 51(1), (2015)
J. Bao, H. Wang, J. Liu, B. Xue, Self-starting analysis of a novel 12/14 type bearingless switched reluctance motor, in 2014 IEEE International Conference on Industrial Technology (ICIT), Busan, Korea, 26 Feb–1 Mar 2014)
J. Bao, H. Wang, B. Xue, The coupling characteristics analysis of a novel 12/14 type bearingless switched reluctance motor, in 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 Oct 2014)
H. Wang, J. Bao, B. Xue, J. Liu, Control of Suspending Force in Novel Permanent Magnet Biased Bearingless Switched Reluctance Motor (IEEE, 2013)
B. Xue, H. Wang, J. Bao, Design of novel 12/14 bearingless permanent biased switched reluctance motor, in 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 Oct 2014
H. Jia, C. Fang, T. Zhang, Finite element analysis of a novel bearingless flux switching permanent magnet motor with the single winding, in 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 Oct 2014
H. Yang, Z. Deng, X. Cao, L. Zhang, Compensation strategy of short-circuit fault for a single-winding bearingless switched reluctance motor, in 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 Oct 2014
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer India
About this paper
Cite this paper
Nageswara Rao, P., Sivakrishna Rao, G.V.K.R., Nagesh Kumar, G.V. (2016). Magnetic Field Analysis of a Novel Permanent Magnetic Suspension Pole Shoe Based Bearing Less Switched Reluctance Motor Using Finite Element Method. In: Satapathy, S., Rao, N., Kumar, S., Raj, C., Rao, V., Sarma, G. (eds) Microelectronics, Electromagnetics and Telecommunications. Lecture Notes in Electrical Engineering, vol 372. Springer, New Delhi. https://doi.org/10.1007/978-81-322-2728-1_72
Download citation
DOI: https://doi.org/10.1007/978-81-322-2728-1_72
Published:
Publisher Name: Springer, New Delhi
Print ISBN: 978-81-322-2726-7
Online ISBN: 978-81-322-2728-1
eBook Packages: EngineeringEngineering (R0)