
Abstract
L5 signal is set up for civil aviation exclusively in GPS (Global Positioning System), and takes up exclusive frequency band. However, the DME (Distance Measurement Equipment) signal which has already applied for distance measurement works as the same frequency band as GPS L5. DME signal with high power will decrease SINR (Signal to Interference and Noise Ratio) of GPS L5 and even give rise to acquisition failure. On DME interference suppression, the traditional methods will bring loss to useful satellite data. Thus the performance of GPS L5 receiver will suffer from serious degradation. In the light of the received signal model, a new DME interference mitigation algorithm is presented in this paper. Firstly, frequency is estimated with time-modulated windowed all-phase DFT (tmwapDFT). Then, we use the estimated frequency to get amplitude and signal delay information with signal separation estimation theory. Compared with traditional method, the proposed method can reserve more useful satellite data. The performance of proposed method is verified by simulations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- GPS L5 signal
- DME interference mitigation
- Time-modulated windowed all-phase DFT
- Signal separation estimation theory
- Precise estimation of parameters
1 Introduction
GPS L5 signal is used for civil aviation exclusively, and takes up exclusive frequency band. Compared with L1 and L2 signal, L5 signal has more power at receiver, more positioning accuracy, stronger anti-interference capability, and can be implemented more conveniently. However, there are a lot of interference equipment working at the L5 frequency band, among which DME (Distance Measurement Equipment) signals make greatest influence on L5 signal. DME interference can cause degradation of SINR (Signal to Interference and Noise Ratio) at GPS receiver, reduce the sensitivity of acquisition, thus lead to the failure of convergence of tracking loop, and finally make it difficult to decode the navigation information [1–4].
Lots of research organizations and universities have been seeking for the methods to mitigate the error brought from DME interference. Many anti-interference techniques have been developed, most frequently used of which are pulse blanking, notch filter and hybrid method.
Pulse blanking method sets the part of signal to zero which is beyond the threshold in time domain, and thus achieves the goal of suppressing the interference [5, 6]. It is easy to implement and has already verified on hardware receiver [7]. However, the main deficiency of this method is that a large part of useful GPS signal will be gotten rid of as well when the interferences are suppressed. And what’s more, this method will also cause a great amount of data gaps, which will make the failure of acquisition, tracking and then positioning of the receiver. Notch filter method mitigates the interference by letting the signal pass a narrow band notch filter involving DME frequencies [5, 8]. Hybrid method uses a moving window in time domain to detect the DME pulse interference and filter data in the frequency domain [5, 9]. Although the next two methods can preserves more useful signals, the data missing problem still exists.
In this paper, we propose a new DME interference suppression method which can keep useful GPS signal to a large extent meanwhile suppress the interference. The efficiency of the proposed approach is verified in the experiments.
2 Data Model and Problem Description
DME baseband signal is a pulse pair which can be modeled as:
When the airborne DME equipment take advantage of the channel 64–126 X for communication, the ground equipment may respond frequencies ranged from 1151 to 1213 MHz [3, 5]. Unfortunately, this frequency band covers the GPS L5 signal with central frequency 1176.45 MHz and bandwidth 24 MHz. Generally, the peak power of DME signal varies from 50 W to 2 kW. The maximum of the pulses from transponder may be up to 2700 per second. The interference of DME will seriously degrade the SINR of GPS receiver and then cause the failure of acquisition.
When the GPS receiver is interfered by only one DME base station, the interference can be eliminated by the method based on NLS criterion [10]. Consider the scenario that the DME pulse interference comes simultaneously from two or more different ground base stations. Due to the difference of distances between GPS receiver and the two more DME ground bases, the GPS receiver will be interfered by two more DME pulses with different Doppler shifts.
It is supposed that there are P DME interferences received, the signal can be modeled as:
where x(t) is DME signal, u(t) is GPS signal, e(t) is the thermal noise. \( \alpha_{p} ,\tau_{p} ,\omega_{dp} \) represent the complex amplitude, time delay and frequency of DME signal respectively.
After A/D conversion, the transformed signal model is given as:
Because GPS satellites signals are buried under the noise level, GPS signals can be taken as noise compared with DME signals. Accordingly, the Eq. (3) can be rewritten as:
3 Algorithm Implementation
3.1 Signal Separation Estimation Theory
Due to the DME pulse is much stronger than GPS signal, it is no need to analyze GPS signal separately. Once DME signal is detected and estimated, we can estimate the frequency and complex amplitude of DME signal under the criterion of NLS [10, 11]. DME pulse pairs can be simply detected by means of calculating the correlation of received signal and a moving window with the width of 12 μs.
In order to get a more precise estimate accuracy, each group of unknown parameters is to be estimated with signal separation estimation theory via iteration. We consider below estimating the unknown parameters \( \left\{ {\hat{\alpha }_{p} ,\hat{\tau }_{p} ,\hat{\omega }_{dp} } \right\}_{p = 1}^{P} \) by minimizing the Nonlinear Least Squares (NLS) criterion [12]
Let \( s(n - \tau_{p} )\text{ = }x(n - \tau_{p} )e^{{j\omega_{dp} (n - \tau_{p} )}} \), then Eq. (5) can be expressed as
Solving the problem of optimization in Eq. (6) yields the estimate \( \hat{\alpha }_{p} ,\hat{\tau }_{p} ,\hat{\omega }_{dp} \) of \( \alpha_{p} ,\tau_{p} ,\omega_{dp} \) as:
where \( {\mathbf{y}}\text{ = }[y( - N/2),y( - N\text{/}2\text{ + }1), \ldots ,y(N\text{/}2 - 1)]^{T} \), \( {\mathbf{Y}}\text{ = DFT}({\mathbf{y}}) \), \( {\mathbf{b}}(\omega_{dp} )\text{ = }\left[ {e^{{j2\omega_{dp} ( - N/2)}} ,e^{{j2\omega_{p} ( - N/2 + 1)}} , \ldots ,e^{{j2\omega_{p} (N/2 - 1)}} } \right]^{T} \), \( S(k)\text{ = DFT}\left( {s(n)} \right) \), \( {\mathbf{S}}\text{ = }diag\left\{ {\hat{S}( - N/2),\hat{S}( - N/2\text{ + }1), \ldots ,\hat{S}(N/2 - 1)} \right\} \), \( {\mathbf{a}}(\omega_{p} ) = \left[ {e^{{j\omega_{p} ( - N/2)}} ,e^{{j\omega_{p} ( - N/2 + 1)}} , \ldots ,e^{{j\omega_{p} (N/2 - 1)}} } \right]^{T} \), \( f_{s} \) is the sampling rate.
Note that the values of \( 2\hat{\omega }_{dp} \) and \( \hat{\omega }_{p} \) can be obtained by the FFT of vectors \( {\mathbf{y}}_{p}^{2} \) and \( {\hat{\mathbf{S}}}^{*} {\mathbf{Y}}_{p} \) respectively.
The steps of optimized method of signal separation estimation theory are given as follow:
- Step 1:
-
Assume \( p = 1 \), take \( \alpha_{1} s(n - \tau_{1} ) \) as unknown waveform. Then calculate \( \hat{\omega }_{d1} \), \( \hat{\alpha }_{1} \), \( \hat{\tau }_{1} \) according to Eqs. (7), (8) and (9) respectively
- Step 2:
-
Assume \( p = 2 \), calculate \( \hat{y}_{2} (n) \) by using \( \hat{\alpha }_{1} ,\hat{\tau }_{1} ,\hat{\omega }_{d1} \) obtained in Step1. After that, \( \hat{\alpha }_{2} ,\hat{\tau }_{2} ,\hat{\omega }_{d2} \) can be gotten with the method similar to Step 1
- Step 3:
-
Compute \( \hat{y}_{1} (n) \) by using \( \hat{\alpha }_{2} ,\hat{\tau }_{2} ,\hat{\omega }_{d2} \) and then redetermine \( \hat{\alpha }_{1} ,\hat{\tau }_{1} ,\hat{\omega }_{d1} \) from \( \hat{y}_{1} (n) \)
- Step 4:
-
Iterate the previous two steps until convergence is achieved to get the final estimates
- Step 5:
-
Assume p = 3, 4…P, repeat the above steps until all parameters of P DME signals are estimated and the convergence conditions are satisfied in the meantime
Finally, the reconstructed DME signals can be expressed as:
Eliminate the DME interference signal from received signal and get the suppressed GPS signal as:
3.2 Frequency Estimation with Time-Modulated Windowed All-Phase DFT
Although a rather effective method has been afforded above, it is difficult to analyze frequency component accurately with DFT from Eq. (7) because of spectral leakage and picket-fence effect [13]. In this paper, time-modulated windowed all-phase DFT(tmwapDFT) is taken advantage of to deal with the problem. [14, 15].
The original windowed all-phase DFT can be implemented as below
where, \( R_{w} (n) \) is the correlation window function.FFT can be used here to reduce computation complexity.
In order to improving the deficiency of missing a half of information, a complex factor \( W_{{\text{2}N}}^{n} \) is modulated to the received signal in time domain.
Hence, the time-modulated windowed all-phase DFT is defined as
It is a better choice to get estimate \( \hat{\omega }_{dp} \) of \( \omega_{dp} \) by tmwapDFT instead of original DFT.
4 Experimental Results
To test and verify the performance of the proposed method, the experiments have been carried out. Where, the satellite data are interfered by DME pulse and down-converted at the intermediate frequency of 1.25 MHz same as the GPS signal. The sample rate is 5 MHz, the SNR (Signal-to-Noise Ratio) is 18 dB.
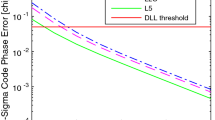
Mean square error (MSE) of time delay and frequency change with JNR (Jammer-to-Noise Ratio) are shown in Figs. 1 and 2. Frequency estimation error of original DFT is too large to reconstruct the DME signal exactly while the proposed method in this paper has a better performance. Frequency error after fine estimation has been further declined in lower JNR condition, while there is no distinct improvement after fine estimation with the JNR increasing because the error of tmwap DFT method is already very small. Time delay error before precise estimation is accurate enough to reconstruct the DME signal exactly. Nevertheless, more little error estimate can be attained after precise estimation which further improve the anti-jamming performance.

Frequency error changes with JNR

Time delay error changes with JNR
Six DME signals from different base stations are received in company with the four GPS signals during the experiment. The JNR of them are 50, 55, 65, 60, 40, 45 dB and the time delays are 2, 2.5, 3, 3.5, 4, 4.5 ms correspondingly. The comparison results between the original signal and the suppressed signal with the proposed method is demonstrated in Fig. 2. The DME signal is mitigated after processing while the useful satellite signal still remains.
The acquisition results of the original and proposed method is given in Fig. 3. Pulse blanking method which lose a lot of useful GPS signal will result in the correlation peaks of acquisition lower than the threshold. The useful data missing problem still exists in hybrid method. Although the correlation peaks are higher than pulse blanking method, the results still do not reach the threshold. Further descending the threshold may let the GPS signal be detected, but the signal power could be too low to finally get an accurate position. The proposed method has prevailed performance and easily acquire the signal. It is slightly bad than GPS only circumstance because the proposed method almost maintain entirely useful signal.

DME interference mitigated by proposed method
5 Conclusions
The traditional DME interference suppression methods which bring about the loss of GPS signal will suffer from serious performance degradation of GPS receiver. In this paper, a new DME interference suppression method for GPS L5 signal are proposed, when the DME interferences come from more than one base station. Firstly, frequency is estimated with time-modulated windowed all-phase DFT (tmwapDFT). Then, we use the estimated frequency to get amplitude and signal delay information with signal separation estimation theory. In order to further improve the estimation accuracy, a two-dimension fine estimation method is proposed, which takes the previous estimated results as the initial values. Experiment results show that the proposed method could estimate the parameters precisely, by which DME signal can be reconstructed and eliminated. It can be shown from the experiment results that the proposed method which keeps more useful satellite data has a better performance compared with conventional ones.
References
Steingass A, Hornbostel A, Denks H, (2010) Airborne measurements of DME interferers at the European hotspot. In: Proceedings of the fourth European conference on antennas and propagation (EuCAP), pp 1–9
Hegarty C, Kim T, et al (1999) Methodology for determining compatibility of GPS L5 with existing systems and preliminary results. In: Proceedings of the institute of navigation annual meeting, Cambridge, MA
Fang W, Wu R, Lu D, Wang W (2011) A new interference suppression method in GPS based on modified GAPES. Sig Process 27(12):1860–1864
Angelis M, Fantacci R, Menci S, Rinaldi C (2005) Analysis of air traffic control systems interference impact on Galileo aeronautics receivers. In: IEEE international radar conference, pp 585–595
Gao G (2007) DME/TACAN interference and its mitigation in L5/E5 bands. In: The ION conference on global navigation satellite systems
Brandes S, Epple U et al (2009) Physical layer specification of the L-band digital aeronautical communications system (L-DACS1). In: Integrated communications, navigation and surveillance conference, pp 1–12
Grabowski J (2002) Characterization of L5 receiver performance using digital pulse blanking. In: The ION conference
Zhang Q, Zheng Y, Wilson SG, Fisher JR, Bradley R (2005) Excision of distance measuring equipment interference from radio astronomy signals. Astron J 129:2933–2939
Anyaegbu E, Brodin G, Cooper J, Aguado E, Boussakta S (2008) An integrated pulsed interference mitigation for gnss receivers. J Navig 61:239–255
Fang Wei, Renbiao Wu, Wang Wenyi, Dan Lu (2012) DME Pulse interference suppression based on NLS for GPS. Int Conf Signal Process 1:174–178
Christensen MG, Jensen SH (2011) New results on perceptual distortion minimization and nonlinear least-squares frequency estimation. IEEE Trans Audio Speech Lang Process 19(7):2239–2244
Li J, Wu RB (1998) An efficient algorithm for time delay estimation. IEEE Trans Signal Process 46(8):2231–2235
Oppenheim AV, Schafer RW (2010) Discrete-time signal processing, 3rd edn, pp 793–840. Prentice Hall, Upper Saddle River
Huang XD, Wang ZH (2007) Principle of all-phase DFT restraining spectral leakage and the application in correcting spectrum. J Tianjin Univ 40(7):882–886
Liu JZ (2001) Multidimensional all phase digital filtering theory and image multiscale geometric representation. PhD dissertation, pp 23–28
Acknowledgment
The work of this paper is supported by the Project of the National Natural Science Foundation of China (Grant No. 61172112, 61179064 and 61271404), Science and Technology Fund of Civil Aviation Administration of China (Grant No. MHRD0606), and the Fundamental Research Funds for the Central Universities (Grant No. ZXH2009A003).
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Li, J., Fang, W. (2016). DME Interference Mitigation Algorithm Based on Signal Separation Estimation Theory for GPS L5. In: Liang, Q., Mu, J., Wang, W., Zhang, B. (eds) Proceedings of the 2015 International Conference on Communications, Signal Processing, and Systems. Lecture Notes in Electrical Engineering, vol 386. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-49831-6_40
Download citation
DOI: https://doi.org/10.1007/978-3-662-49831-6_40
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-49829-3
Online ISBN: 978-3-662-49831-6
eBook Packages: EngineeringEngineering (R0)