
Abstract
In order to improve the precision of BDS precise ephemeris, GPS/BDS one-step combined precise orbit determination based on double-differenced mode was testified in this contribution. And double-differenced data was not formed between GPS and BDS, which eliminates the effect of inter system bias (ISB) on the precision of BeiDou precise orbit. Not only GPS and BDS orbit parameters are estimated, earth rotation parameter (ERP) and station coordinates are also estimated. Data of 114 tracking stations from MGEX are processed. The analysis shows that: Compared with IGS final orbit, the precision of GPS orbit is 5 cm, the precision of Xp, Yp, length of day (LOD) is 0.06, 0.10 mas, 21.6 μs. Validating the BDS orbit using SLR observation shows that the radial precision of BDS IGSO and MEO satellites is better than 6 cm, while that of GEO satellite is about 0.37 m.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Since December 2012, BeiDou Satellite Navigation System (BDS), which is being developed by China, began to provide official navigation, positioning and timing service for Asia-Pacific area [1]. In order to monitor the signal of BDS and evaluate the performance of BDS, many BeiDou tracking networks have been set up, including BeiDou Experiment Tracking Stations (BETS), international GNSS Monitoring and Assessment System (iGMAS) and Multi-GNSS Experiment (MGEX). MGEX was established by International GNSS Service (IGS) in 2012 to enable an early familiarization with the new signals and systems, such as BeiDou, Galileo, and QZSS. At present, more than 100 tracking stations have been set up around the world.
With the improvement of space segment of BDS and the increasing numbers of tracking stations, widely research on Precise Orbit Determination (POD) of BeiDou satellites have been carried out. In 2012, based on data from BETS, Shi, Zhao, Ge and He carried out POD of BeiDou satellites and the radial precision of 10 cm was achieved [2–5]. Steigenberger analysed the strategy of POD of BeiDou satellites with bernese software, which focused on arc lengths and solar radiation pressure (SRP) parameters [6]. In 2013, Based on data from MGEX and iGMAS, Zeng did research on GPS/BDS indirect fusion POD, in which double-differenced data was utilized [7]. Besides, Lou carried out POD of BeiDou with data of MGEX and BETS and the results show that the ECOM 5 parameter model was best suitable for it [8]. Due to the limited knowledge on measurement model and force model of BeiDou satellites, the above all research, whether un-difference mode or double-difference mode, all use the two-step method. The two-step method can be described as follows: firstly public parameters, such as receiver error, coordinates, troposphere delay, are estimated with GPS data using precise product from IGS; secondly, BeiDou orbit determination was conducted with the above parameter being fixed. However, little research on GPS/BDS one-step fusion POD has been done. Based on double-differenced mode, GPS/BDS one-step combined POD was proposed in this paper. Compare with POD of BDS satellite with Beidou data only, GPS/BDS combined POD can further improve the precision of Beidou orbit, by precisely estimating the public system bias. Not only are orbit parameters of BDS and GPS estimated, but also station coordinates and ERP are estimated. Data from MGEX was utilized to testify the POD strategy.
The paper is organized as follows. Section 20.2 describes the dataset being used and the processing strategy of GPS/BDS combined POD in details; Sect. 20.3 analyses the precision of GPS orbit and BDS orbit, including internal consistency and external validation. Besides, the ERP and coordinate repeatability are also assessed. Section 20.4 summarizes the results and derives the necessary conclusions.
2 Data and Processing
2.1 Data
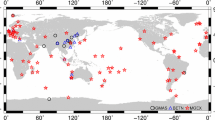
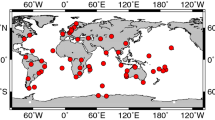
All stations of MGEX are equipped with the Multi-GNSS receivers, which supports tracking of GPS as well as one of the new BeiDou, Galileo, or QZSS constellations. Observation files of MGEX are stored in RINEX 3.02 and its sample interval is 30 s. In this paper, observation of 114 stations from MGEX are utilized for data processing, of which 75 stations can track GPS and BDS constellations simultaneously and the other 39 stations can only track GPS constellation. Figure 20.1 illustrated the distribution of 114 MGEX stations being used. From Fig. 20.1, it is clearly that there is only one station in china area. The data processed in this paper covers the period from 1 October 2014 until 31 October 2014.

Tracking station network of MGEX
2.2 Processing Strategy
The Bernese GNSS Software is a scientific, high-precision, multi-GNSS data processing software developed at the Astronomical Institute of the University of Bern (AIUB). However, the ability of data processing of BeiDou system is lacked in this software. Thus, a modified version of Bernese GNSS software was developed, which allows the process of BeiDou data.
The data process comprises of two parts: 1 day solution and 3 day solution. The dual-frequency data of GPS L1 L2 and BDS B1 B2 are employed and the relative weight between GPS and BDS data is 1:1. The process flow of 1 day solution is as follows. Firstly, with zero difference data, receiver clock jumps are detected and corrected and the code observation are smoothed with phase observation. After data importing, the receiver clock are synchronizing using zero difference code data and broadcast ephemeris of GPS and BDS. Then, Single-difference data is formed with a strategy selecting the baselines with the highest number of common-observations from all possible baselines. The pre-processing of phase observation, which runs in a baseline-wise mode, identifies and correct cycle slips using the triple-difference observations. In the next step, a first ambiguity-float network is computed based on the ionosphere-free LC of the double-difference observation. If not handled properly, ISB will bias the final orbit, which is formed when forming double-difference data between GPS and BDS, So, double-difference data was not formed between systems. Based on this solution, the double-difference data was screened for outliers. Besides, bad stations and bad satellites are detected and automatically excluded from the solution. At last, the 1 day solution was finished and 1 day normal equation was generated, which including GPS/BDS six orbit element, ECOM 5 SRP parameters, coordinates, troposphere parameters and ERP. Important options of 1-day solution about measurement model, force model and parameterizations are given in Table 20.1.
The 3 day solution is generated by combining a set of three normal equations from consecutive 1-day solutions. The 3 day orbits are represented by one set of osculating elements, SRP parameters and pseudo-stochastic pulses at 12 h intervals. If satellite modelling problems or maneuver was detected, a 3-day arc is split up at the boundaries into two or three arcs. What is more, in the 3 day solution the ERP, which were set up at 2 h intervals in the 1 day solution, were transformed to daily parameters. When generating the 3 day solution, the ERP and troposphere parameters are stacked at the boundary to form a continuous piecewise linear function over the whole 3-day interval.
3 Results and Discussion
In order to test the processing strategy above, not only GPS orbit and BDS orbit are evaluated, but also ERP and station coordinates are assessed. As far as BDS orbit, Satellite Laser Ranging (SLR) data was also used to validate the precision of BDS orbit.
3.1 Precision of GPS Orbit
In order to evaluate the precision of GPS orbit, IGS final orbit products were used as reference, whose precision is 2.5 cm. The monthly average of difference between IGS orbit and estimated orbit are given in Fig. 20.3. GPS PRN3, PRN13, PRN27 satellites are excluded from the data process because of satellite maneuver or modelling problems. From Fig. 20.2, it is clearly that the GPS orbit error (3DRMS) is better that 5 cm (Fig. 20.2).

GPS orbit error (compared with IGS final product)
3.2 Precision of BDS Orbit
3.2.1 Internal Consistency
As far as internal consistency, three methods including overlap test, Day Boundary Discontinuities (DBD) and 2 day orbit fit RMS were used. The middle day of the 3 day arc is used for overlap test and computation of the day boundary discontinuities and 2 day fit RMS. The results are given in Table 20.2. The overlap test results and 2 day orbit fit RMS are monthly averages.
The overlap test results show that: for BDS GEO satellites, the radial error is better than 5 cm, the along error is on the several decimetres level and the normal error is better than 10 cm; for IGSO satellites and MEO satellites, the radial error is superior to 5 cm, the along error is better than 15 cm and that of normal is better than 10 cm. It is clearly that the precision of C04 is significantly worse than other satellite, which may be caused by the poor geometry condition of it.
By computation the DBD values, the DBD of MEO is better than 10 cm, the DBD of IGSO is about 10 cm and that of GEO is from 20 cm to 90 cm. By analysis the 2 day fit RMS, it is shown that the fit RMS for IGSO and MEO is better than 5 cm, and that of GEO is also better than 15 cm, which is very surprising. It can also be found out that: the 2 day fit RMS values are smaller by a factor of 2–10 factors than the DBD values. The possible reasons are as follows: the DBD values are 3D position difference of two consecutive orbits at midnights, whereas the 2 day fit RMS values are some kind of average over 2 days.
Although the MGEX network is getting larger and larger, it is clearly that the precision of GEO satellites are significant worse than that of IGSO and MEO, especially in along direction.
3.2.2 External Validation
SLR, which is completely independent of microwave measurement, is well suited to validate GNSS (Global Navigation Satellite System) orbit derived from microwave measurement. Satellites of BDS are all equipped with laser retro-reflectors arrays. Since 2012 April, C01, C08, C10, C11 satellites of BDS are routinely being observed by the stations coordinated by the International Laser Range Service (ILRS) [9]. Based on SLR data of October 2014, precise orbit of BeiDou are validated. The 1 day orbit is the middle day of the 3 day orbit. The Marini-Murray model is employed for correcting the range measurement for troposphere refraction and the coordinate of SLR station are fixed to SLRF2008. Outliers in the SLR range residual larger than 100 cm were excluded. Moreover, outliers are also excluded with the rule of 3-sigma.
From Fig. 20.3, it can be seen that C01 satellite was observed by 6 SLR stations. Four stations, including 1868, 7821, 7237, 7249, are in the northern part of the globe, while the other two are in the southern part. It is clearly in Fig. 20.3 that the residual of C01 is between −50 cm and 15 cm and the average of it is −37 cm and its standard variation is 7.7 cm. The minus of the average value indicates that the SLR measurement is less than the distance computed with the coordinates and the orbit. Compared with C01, more stations are involved with the tracking of C08, C10 and C11 satellites. 9 stations observed the C08 and C10 satellites and 12 SLR stations observed the C11 satellites. From Figs. 20.4, 20.5 and 20.6, it is shown that the residual of these three satellites are between −10 and 10 cm. And the mean values are −3.5, 1.1 and −1.5 cm and the standard variation is 5.8, 4.8 and 4.8 cm. Because the SLR residual mainly reflects the radial precision of BeiDou orbit, the result of SLR validation is in agreement with the RMS value of overlap test. Being different from BDS IGSO and MEO, the average of residuals of C01 is much larger, which needs further investigation.

SLR range residual derived from BDS precise ephemeris for C01

SLR range residual derived from precise ephemeris for C08

SLR range residual derived from BDS precise ephemeris for C10

SLR range residual derived from BDS precise ephemeris for C11
3.3 ERP and Coordinate Repeatability
To assess the quality of ERP parameters, including Xp and Yp and LOD, CODE final ERP products are used as reference. It contains ERP parameters of 3 days and time resolution is 12 h. The mean and RMS of three ERP parameters are given in Table 20.3. The precision of Xp, Yp, and LOD is 0.58, 0.63 mas, 21.6 μs. Besides, the result of ERP, which is estimated only with GPS data, is also given in Table 20.3. Compared with GPS single system, the precision of LOD degrades from 9.6 to 21.6 μs. The reason behind it should be further invested. What is more, the precision of Yp is worse by 2 factors of that of Xp. This may be caused by the asymmetry of the tracking station of MGEX.
The coordinate repeatability of solution is an indicator of the coordinate and can also serve as an indicator for the quality of the orbit parameterization. If the processing strategy is not appropriate, the coordinate estimated will be biased, which will worsen the coordinate repeatabilities. The RMS of the residual of daily coordinate with respect to the mean solution for the east, north and height components are given in Table 20.4. With the processing strategy proposed in this paper, the repeatabilities in east, north and height component are 5.2, 6.3, 11.2 mm.
4 Summary and Conclusion
Based on data of MGEX, combined GPS and BDS for POD of Beidou satellites were carried out in the contribution, which used the double difference data. And double difference data was not formed between GPS and BDS data, which eliminate the effect of ISB. The analysis shows that the precision of GPS orbit is about 5 cm (3DRMS), which is better than that of BDS satellite. The precision of BDS MEO is better than that of IGSO and GEO satellites and that of GEO is the worst. SLR check shows that the radial error of BDS IGSO and MEO is about 5 cm and system bias of 0.37 m exists in the SLR residual of C01 satellite. Moreover, the precision of Xp, Yp and LOD is respectively 0.058, 0.10 mas, 21.6 μs. The coordinate repeatabilities in E, N and U directions are 5.2, 6.3 and 11.2 mm.
With the increasing numbers of MGEX tracking stations, especially in china, the orbit precision of BDS satellites can be furtherly improved. Because the solution obtained in the contribution is just ambiguity-float solution, further research should be focused on ambiguity resolution.
References
China Satellite Navigation Office (2012) BeiDou Navigation satellite system signal. In: Space interface control document 2.0. Technical report
Shi C, Zhao QL, Min Li et al (2012) Precise orbit determination of Beidou Satellites with precise positioning. Sci China Earth Sci 55:1079–1086
Zhao Q et al (2013) Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J Geodesy 87:475–486
Ge M, Zhang HP, Jia XL, Song SL, Wickert J (2012) What is achievable with the current compass constellation. GPS World 1:29–34
He L, Ge M, Wang J, Wickert J, Schuh H (2013) Experimental study on the precise orbit determination of the BeiDou navigation satellite system. Sensors 13:2911–2928
Steigenberger P, Hugentobler U, Hauschild A, Montenbruck O (2013) Orbit and clock analysis of compass IGSO and GEO satellites. J Geodesy 87:515–525
Zeng G, Gong B, Wang JS, Li J, Zhu J (2014) BeiDou/GPS indirect fusion precision orbit determination. Proc Chin Navig Conf 3:55–63
Lou Y, Liu Y, Shi C, Yao X, Zheng F (2014) Precise orbit determination of BeiDou constellation based on BETS and MGEX network. Sci Rep 1–10
Pearlman MR, Degnan JJ, Bosworth JM (2002) The International Laser Ranging Service. Adv Space Res 30:135–143
Acknowledgments
This work is co-supported by international GNSS Monitoring and Assessment Service (iGMAS), National Natural Science Foundation of China (41104021).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Kong, Y., Sun, B., Yang, X., Zhang, X. (2015). GPS/BDS One-Step Combined Precise Orbit Determination Based on Double-Differenced Mode. In: Sun, J., Liu, J., Fan, S., Lu, X. (eds) China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume III. Lecture Notes in Electrical Engineering, vol 342. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-46632-2_20
Download citation
DOI: https://doi.org/10.1007/978-3-662-46632-2_20
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-46631-5
Online ISBN: 978-3-662-46632-2
eBook Packages: EngineeringEngineering (R0)