
Abstract
An improved function-type contraction-expansion factor is designed in this paper. Optimization criterion rules of contraction-expansion factor are designed by analyzing the changing relationship between the input signals of fuzzy controller and contraction-expansion factor. And then, an improved contraction-expansion factor is designed to optimize the structure and improve the control quality of the system. Based on Lyapunov stability theory, the stability of variable universe fuzzy control system with designed contraction-expansion factor is proved. Simulation results show that the design of variable universe fuzzy control method can effectively improve system performance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
44.1 Introduction
The idea of variable universe fuzzy control was first proposed to regulate the universe by a set of nonlinear contraction-expansion factor. That is, the universe is changed with actual error. With the fix fuzzy rule-base, change of contraction-expansion factor is equal to decrease or increase the number of fuzzy rules. It is proven that the variable universe fuzzy controller is a high-precision controller with self-organization, self-learning and self-adaption characters [1].
Generally, there are three basic types of variable universe fuzzy controllers, which are based on function, fuzzy inference and intelligent searching algorithm, respectively. A contraction-expansion factor of exponential type is deduced and applied successfully in the control of four-level-inverted pendulum in [2]. After the change law of contraction-expansion factor is analyzed, a contraction-expansion factor of proportional type is presented to be not only as the antecedent of rules but also the consequent in [3]. In order to overcome large amount of calculation and difficulty of realization, the weighted sum is used to replace the integral calculation in contraction-expansion factor of integral type on the basis of the previous research [4]. For the various plants, it is difficult to construct contraction-expansion factor by normal function type. So some contraction-expansion factors of inference type are proposed in [5], with the consideration of the advantage of fuzzy language inference mechanism. For example, according to the inference classification of error, a contraction-expansion factor of inference type is designed to improve the control precision in [6]. Clearly, the selection of contraction-expansion factor is important for the performance of fuzzy controller. With the consideration of stability of control system, which is realized by contraction-expansion factor, an improved contraction-expansion factor of function type is designed on the analysis of the relationship between contraction-expansion factor and change of universe. Meanwhile, its stability is proved by Lyapunov method. Simulation results show that the fuzzy controller with the improved contraction-expansion factor is effective in comparison with the results of normal factors.
44.2 Definition of Improved Contraction-Expansion Factor
The following practical contraction-expansion factors [2, 6] are commonly used in fuzzy system, which are,
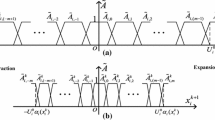
Suggest the input universes of SISO fuzzy controller is expressed as \( [ - E,E] \), and its contraction-expansion factor is \( \alpha (x) \). Let the initial universe \( X = [ - 2,2] \). For Eq. (44.1), \( \tau = 0.85 \) and for Eq. (44.2), \( \lambda = 0.97,k = 1 \). The relationship between contraction-expansion factor and universe is shown in Fig. 44.1.

Relationship between contraction-expansion factor and universe
Supposed that there are there terms: big, medium and small for the description of universe and \( \alpha (x) \). With the Fig. 44.1, the relationship between contraction-expansion factor and universe, \( x \to \alpha (x) \), can be concluded by the following rules: (44.1) if error \( x \) is big then \( \alpha (x) \) is big; (44.2) if error \( x \) is medium then \( \alpha (x) \) is medium; (44.3) if error \( x \) is small then \( \alpha (x) \) is small. When \( x \) is big, the number of control rules need not be added, so the change rate of \( \alpha (x) \) is small. If \( x \) is small, the system is near stable state, the system need more fuzzy rules to enhance the performance of convergence, i.e., the change rate of \( \alpha (x) \) should be big to make error close to zero rapidly. Based on the above analysis, the rules for \( x \to \Updelta \alpha (x) \) can be concluded by: (44.1) if error \( x \) is big then \( \Updelta \alpha (x) \) is big; (44.2) if error \( x \) is medium then \( \Updelta \alpha (x) \) is medium; (44.3) if error \( x \) is small then \( \Updelta \alpha (x) \) is small. The rules for \( \alpha (x) \) and \( \Updelta \alpha (x) \) are called as designing criterion. With the consideration of coordination and zero avoidance of contraction-expansion factor, \( \Updelta \alpha (x) \) is denoted by
After solving differential equation, Eq. (44.3) becomes,
Let \( k_{1} = 2k \), Eq. (44.3) becomes
where \( \lambda \) is the adjusted parameter. Equation (44.4) is the improved contraction-expansion factor designed in the paper, and its performance of improved contraction-expansion factor is discussed as follows,
-
(1)
According to the basic definition of contraction-expansion factor, as to Eq. (44.4), when \( \left| x \right| \to E \), \( \alpha \to 1 \) and \( \left| x \right| \to 0 \), \( \alpha \to 1 - \lambda \). Obviously, Eq. (44.4) is satisfying to the requirements of definition of contraction-expansion factor, which are duality, monotonicity, zero avoidance and coordination.
-
(2)
According to the designing criterion for contraction-expansion factor, there is
$$ {{\rm{d}}\alpha (x) \mathord{\left/ {\vphantom {{d\alpha (x)} {dx}}} \right. \kern-0pt} {{\rm{d}}x}} = - \lambda ( - k_{1} + k_{2} \left| x \right|)e^{{ - k_{1} \left| x \right| + k_{2} x^{2} }} $$(44.6)
For Eq. (44.6), when \( \left| x \right| \to E \), \( {{\rm{d}\alpha ({\textit{x}})} \mathord{\left/ {\vphantom {{d\alpha (x)} {{\rm{d}}x}}} \right. \kern-0pt} {{\rm{d}}x}} \to 0 \); and when \( \left| x \right| \to 0 \), \( {{\rm{d}}\alpha (x) \mathord{\left/ {\vphantom {{d\alpha (x)} {{\rm{d}}x}}} \right. \kern-0pt} {{\rm{d}}x}} \to \lambda k_{1} \), which can be adjusted by the adapt value of k 1. So the improved contraction-expansion factor, denoted by Eq. (44.4), satisfies the designing criterion. Additionally, \( \alpha (x) \) can be proportional-type and exponential-type [2, 7] with the change of k 1 and k 2. Let the initial universe \( X = [ - E,E] \), and then compare the improved contraction-expansion factor with other two types of typical ones, which are generally called as proportional factor and exponential factor and denoted by Eqs. (44.1) and (44.2), respectively,
where \( \;\tau \in (0,1) \), \( \varepsilon \) is a very small positive constant.
where \( \lambda \in (0,1) \), \( k > 0 \).
Suggest \( X = [ - 2,2] \) and the figures of \( \alpha (x) \) and \( {{\rm{d}}\alpha (x) \mathord{\left/ {\vphantom {{d\alpha (x)} {dx}}} \right. \kern-0pt} {{\rm{d}}x}} \) are shown in Figs. 44.2 and 44.3.

Output of \( \alpha (x) \)

Output of \( {{\rm{d}}\alpha (x) \mathord{\left/{\vphantom {{\rm{d}\alpha (x)} {\rm{d}x}}} \right. \kern-0pt} {{\rm{d}}x}} \)
It is obvious to find that the change rate of improved factor is bigger when error is small, which leads to fast change of universe and makes system arrive at stable state quickly. Additionally, the figure of improved factor is smoother than other two ones and without jump like exponential factor.
44.3 Stability Analysis of Fuzzy System with Improved Contraction Expansion Factor
Think of the following n-order continuous nonlinear system,
where \( f(x_{1} ,x_{2} \ldots x_{n} ) \) is an unknown nonlinear continuous function, and \( \left| {f(\varvec{x})} \right| \le f_{0} (\varvec{x}),\;0 < b_{1} < b < b_{2} ,d \le D_{N} \), \( f_{0} (\varvec{x}) \) is a known continuous function, \( b \) is an unknown constant, \( d \) is a disturbance variable, \( b_{1} ,b_{2} \) are constants, \( u,y \) are control input and system output, respectively, and \( u,y \in R \). Let \( \varvec{x} = [x_{1} ,x_{2} \ldots x_{n} ]^{T} \triangleq (x,\dot{x} \ldots x^{(n - 1)} )^{T} \), then Eq. (44.9) can be expressed by
where \( \hat{A} = \left[ {\begin{array}{*{20}c} 0 & 1 & 0 & 0 & \cdots & 0 & 0 \\ 0 & 0 & 1 & 0 & \cdots & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \\ 0 & 0 & 0 & 0 & \cdots & 0 & 1 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ \end{array} } \right],\;\;\;\hat{B} = \left[ \begin{gathered} 0 \hfill \\ 0 \hfill \\ \vdots \hfill \\ 0 \hfill \\ 1 \hfill \\ \end{gathered} \right],\;\;\;\;\hat{C} = \left[ \begin{gathered} 1 \hfill \\ 0 \hfill \\ 0 \hfill \\ \vdots \hfill \\ 0 \hfill \\ \end{gathered} \right] \) .
Let \( r \) be input of system, and error \( e = r - y \), denoted by \( \varvec{e} = (e_{1} ,e_{2} \ldots e_{n} )^{T} \triangleq (e,\dot{e} \ldots e^{(n - 1)} )^{T} \). In order to realize the control target, that is, \( \mathop {\lim }\limits_{t \to \infty } \left\| \varvec{e} \right\| = 0 \), select a Hurwitz polynomial, which is,
Because the system, denoted by Eq. (44.9), is stable if and only if all roots of Eq. (44.10) belongs to left half-plane, an equation about error can be structured as;
Obviously, e is approximately stable if Eq. (44.11) has a solution. Let \( \varvec{k} \triangleq [k_{n} ,k_{n - 1} \ldots k_{1} ]^{T} \), then Eq. (44.12) can be expressed by
and there is,
Let \( u_{f} \) is the output of the fuzzy controller with the improved contraction-expansion factor, and \( u_{s} \) is offset variable for the output of the fuzzy controller, so there is
Substituting Eq. (44.15) into (44.10) gives
With Eqs. (44.13) and (44.16), the error is
Let \( A = \left[ {\begin{array}{*{20}c} 0 & 1 & 0 & \cdots & 0 \\ 0 & 0 & 1 & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \cdots & 1 \\ { - k_{n} } & { - k_{n - 1} } & { - k_{n - 2} } & \cdots & { - k_{1} } \\ \end{array} } \right],\;\;\;\;B = \left[ \begin{gathered} 0 \hfill \\ 0 \hfill \\ \vdots \hfill \\ 1 \hfill \\ \end{gathered} \right] \), then Eq. (44.11) is,
Theorem 44.1
The system expressed by Eq. (44.18) is a approximately stable system with the adaptive selection of \( u_{s} \).
Prove
According to Lyapunov equation, there is a positive definite matrix \( P \) to satisfy the following condition with arbitrary selected positive definite matrix \( Q \).
Construct energy function \( V(\varvec{e}) = {{\varvec{e}^{T} P\varvec{e}} \mathord{\left/ {\vphantom {{\varvec{e}^{T} P\varvec{e}} 2}} \right. \kern-0pt} 2} \), and then \( \dot{V}(\varvec{e}) \) is
where \( P_{n} = [p_{1} ,p_{2} \ldots p_{n} ]^{T} \).
Where \( I^{*} = \left\{ \begin{array}{ll} 1, & \left| {\varvec{e}P} \right|(f_{0} + \left| {r^{n} } \right| + \left| {\varvec{k}^{T} \varvec{e}} \right| + b_{2} \left| {u_{f} } \right|) < {{\varvec{e}^{T} P\varvec{e}} \mathord{\left/ {\vphantom {{\varvec{e}^{T} P\varvec{e}} 2}} \right. \kern-0pt} 2} \hfill \\ 0, & \rm{otherwise} \hfill \\ \end{array} \right. \).
With Eqs. (44.8) and (44.14), there is
When \( I^{*} = 0 \), \( \dot{V}(\varvec{e}) \le 0 \); When \( I^{*} = 1 \), \( \dot{V}(\varvec{e}) \le - {{\varvec{e}^{T} Q\varvec{e}} \mathord{\left/ {\vphantom {{\varvec{e}^{T} Q\varvec{e}} 2}} \right. \kern-0pt} 2} \le 0 \), and if and only if \( \left\| \varvec{e} \right\| = 0 \), \( \dot{V}(\varvec{e}) = 0 \). So the system expressed by Eq. (44.18) is a approximately stable system with the adaptive selection of \( u_{s} \).
Deduction 44.1
The error vector is bounded after adding of Compensator \( u_{s} \) to the system, i.e., \( \exists E_{0} > 0 \), make \( \left\| e \right\| \le E_{0} \). Additionally, If the inference input \( r \) is bounded, the state variable \( x \) is also bounded.
Prove
Because of \( V(e) \ge 0 \) and \( \dot{V} \le 0 \), st. \( \forall t \), \( V(e) \le V_{0} \). Let \( \lambda_{\hbox{min} } \) is the minimum eigenvalue of \( P \), there exists \( \frac{1}{2}\left\| e \right\|^{2} \lambda_{\hbox{min} } \le \frac{1}{2}e^{T} Pe = V(e) \le V_{0} \). Because \( P \) is positive definite matrix, \( \lambda_{\hbox{min} } > 0 \), \( \left\| e \right\| \) is :\( \left\| e \right\| \le \sqrt {{{2V_{0} } \mathord{\left/ {\vphantom {{2V_{0} } {\lambda_{\hbox{min} } (P)}}} \right. \kern-0pt} {\lambda_{\hbox{min} } (P)}}} \).
Let \( E_{0} = \sqrt {{{2V_{0} } \mathord{\left/ {\vphantom {{2V_{0} } {\lambda_{\hbox{min} } }}} \right. \kern-0pt} {\lambda_{\hbox{min} } }}} \), then \( \left\| e \right\| \le E_{0} \). Supposed that the system input \( r \) is bounded, \( \exists \Upomega_{r} > 0 \) and \( \forall t \), make \( \left\| r \right\| \le \Upomega \), where \( r = (r,\dot{r}, \ldots ,r^{(n - 1)} ) \). Obviously, \( \left\| x \right\| \le \left\| r \right\| + \left\| e \right\| \le \Upomega_{r} + E_{0} \). Let \( \Upomega_{x} = \Upomega_{r} + E_{0} \), then \( \left\| x \right\| \le \Upomega_{x} \), that is, \( x \) is bounded.
44.4 Simulations
Consider the non-minimum phase system \( G(s) = {1 \mathord{\left/ {\vphantom {1 {s^{2} - 0.65\rm{s} + 1}}} \right. \kern-0pt} {s^{2} - 0.65\rm{s} + 1}} \). Without any control, the system denoted by Eq. (44.6) is divergent and unstable, shown in Fig. 44.4. The sampling time \( T = 0.01 \).

Step responding figure of the system without control
Parameters of fuzzy controller are: Universes of error \( e \), change of error \( ec \) and output \( u \) are \( [ - 6,6] \). Scale factors of \( e \), \( ec \) and \( u \) are \( k_{e} = 5 \), \( k_{ec} = 2 \), \( k_{u} = 1 \) respectively. Fuzzy partitions of \( e \), \( ec \) and \( u \) are \( \left\{ {\begin{array}{*{20}c} \text{NB}, \text{NM}, \text{NS}, \text{ZO}, \text{PS}, \text{PM}, \text{PB} \\ \end{array} } \right\} \) respectively, Here, the membership functions are all taken triangle membership functions, shown as Fig. 44.5 and fuzzy rules are shown in Table 44.1.

Distribution of fuzzy sets for \( e \), \( ec \) and \( u \)
Three kinds of contraction-expansion factors are selected as followings: proportional contraction-expansion factor: \( \alpha (x) = \left( {\left| x \right|/E} \right)^{\tau } \), where \( \tau = 0.5 \); exponential contraction-expansion factor: \( \alpha (x) = 1 - \lambda_{1} \text{exp} ( - {k_{1} x^{2}} ) \), where \( \lambda_{1} = 0.88,k_{1} = 0.8 \), and improved contraction-expansion factor: \( \alpha (x) = 1 - \lambda_{2} \text{{exp}} ( - k_{2} \left| x \right| + k_{3} x^{2} ) \), where \( \lambda_{2} = 0.98, \) \( k_{2} = 0.9, \) \( k_{3} = 0.01 \). With the same structure of fuzzy controller, figures for fuzzy control system with the above three kinds of expansion factors are shown in Figs. 44.6 and 44.7.

Step responding figures

Changes of expansion factors with error
With Figs. 44.6 and 44.7, the fuzzy system with improved contraction-expansion factor is of some good characteristics, such as short setting time, little overshot, small stable error, strong robustness. Meanwhile, the simulation results also manifest the effective design and optimal designing criterion.
44.5 Conclusion
An improved contraction-expansion factor is designed in the paper. With the discussion of the relationship between error, weight of university and contraction-expansion factor, optimal designing criterion for contraction-expansion factor is deduced, which gives the basis for design of an improved contraction-expansion factor. And then, stability of fuzzy system with improved contraction-expansion factor is proved by Lyapunov stability theorem. Finally, simulations for a non-minimum phase system are manifested that the performance of the fuzzy system with an improved contraction-expansion factor is more effective than that with proportional contraction-expansion factor and exponential contraction-expansion factor.
References
Li H, Zhihong M (2002) Variable universe stable adaptive fuzzy control of a nonlinear system. Comput Math Appl 44:799–815
Li H, Zhihong M, Jiayin W (2002) Variable universe adaptive fuzzy control on the quadruple inverted pendulum. Sci China Ser E Technol Sci 45(2):213–224 (in Chinese)
Li H (1999) Adaptive fuzzy controllers based on variable universe. Sci China Ser E Technol Sci 42(1):10–20 (in Chinese)
Long Z, Liang X, You K, Chen L (2008) Double-input and single-output fuzzy control algorithm with potentially-inherited variable universe and its convergence. Control Theor Appl 25(4):683–687 (in Chinese)
Cao Ming, Chen XinChu (2012) Design of fuzzy controller based on variable universe of discourse. Mech Electrical Technol 35(4):2–4
TAN Bing-wen, LI Chun-wen (2013) Comparative study of several selection methods of the expansion factor for variable universe. Sci Technol Eng (4):908–911
Hongxin Li (1999) Adaptive fuzzy control based on variable universe of discourse. Sci China 29(1):32–42 (in Chinese)
Acknowledgments
This work is supported by Natural Science Foundation of Hubei provincial (2013CFC077) and Engineering Research Center of for Metallurgical Automation and Detecting Technology of Ministry of Education.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Huang, W., Long, H. (2015). Design of an Improved Variable Universe Fuzzy Control System and Its Stability Analysis. In: Deng, Z., Li, H. (eds) Proceedings of the 2015 Chinese Intelligent Automation Conference. Lecture Notes in Electrical Engineering, vol 337. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-46463-2_44
Download citation
DOI: https://doi.org/10.1007/978-3-662-46463-2_44
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-46462-5
Online ISBN: 978-3-662-46463-2
eBook Packages: EngineeringEngineering (R0)