
Abstract
In vision, the perceived velocity of a moving stimulus is different depending on whether the image moves across the retina with the eyes immobile or whether the observer pursues the stimulus such that the stimulus is stationary on the moving retina. The effect is known as the Aubert-Fleischl phenomenon. Here, we reproduced the analog of this visual illusion in haptics. For this purpose, we asked our participants to estimate the speed of a moving belt either from tactile cues, by keeping the hand world stationary, or from proprioceptive cues by tracking the belt with a guided upper-limb movement. The participants overestimated the speed of the moving stimulus determined from tactile cues compared with proprioceptive cues, in analogy with the Aubert-Fleischl phenomenon. Reproducing the illusion in the haptic modality may help evaluating some of the general mechanisms of spatial constancy in perceptual systems.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The retina, just like the skin, is a sensing surface that is movable with respect to the external space. This raises the question how the spatial constancy is achieved, that is how the velocity in the external world is perceived, given the non-stationary sensing surface [1]. In vision, the perceived velocity of a moving stimulus is different depending on whether the image moves across the retina with the eyes immobile, i.e. world-stationary, or whether the observer pursues the stimulus such that the stimulus is stationary on the moving retina (sensing surface). In the first case the velocity of the stimulus has to be estimated from the change of the luminance profile on the retina over time. In the latter case the velocity of the stimulus has to be estimated from the motion of the eye, that is from extra-retinal signals, such as the efferency copy to the eye-muscles. The stimulus is perceived as faster when it is estimated from the retinal signals compared to extra-retinal signals, that is when the eye is stationary compared to when it is pursuing the stimulus. The effect is known as the Aubert-Fleischl phenomenon [2, 3].
Three main hypotheses have been suggested to explain the illusion. First, it may be the consequence of an intrinsic difference between the retinal and extra retinal velocity signals, that is, the gain of the two signals would be intrinsically not unitary [4]. In a second hypothesis, the illusion would be the consequence of the bias induced in the retinal signal from the temporal frequency of the patterned stimulus [5, 6]. In accordance with this hypothesis, the illusion changes in magnitude and in sign depending on the frequency of the visual stimulus, and it even disappears when a single edge is used as stimulus [5, 7]. In a third hypothesis, the illusion would arise due to the difference in precision between the retinal and extra retinal signals [8]. The following Bayesian process would generate the illusion: First, the observer would measure independently the world-framed and the relative velocity of the object from the eye pursuit and retinal signals respectively. Each of the two measurements is combined with a static-world prior (sometimes called “slow motion” prior), reflecting the statistics that the world observed (inanimated objects) tends to be stationary or move slowly in the majority of all cases. The noisy sensory measurements (corresponding to the likelihood distribution in the Bayesian framework) and prior distributions are multiplied and the weighting between them depends on the relative variance of the distributions. The world-framed and the relative velocity measurements have different variance, hence are differently affected by the prior. Therefore, the sum of the two would generate the illusion.
Here, we aimed to reproduce the analog of this visual illusion in haptics. For this purpose, we asked our participants to estimate the speed of a moving belt either from tactile cues, by keeping the hand world stationary, or from proprioceptive cues by tracking the belt with a guided upper-limb movement. If the illusion were the same in touch as in vision, we expect the speed to be overestimated in the tactile-based estimates compared with the proprioceptive estimates. Reproducing the illusion in the haptic modality may help evaluating some of the general mechanisms of spatial constancy in perceptual systems.
2 Methods
2.1 Participants
Six healthy volunteers participated to the experiment (5 females, age range: 19–29 years). All participants were naïve to the purpose of the experiment, and gave informed consent prior to participation. The experiment was approved by the Ethical Committee of the University Clinics of Tübingen, Germany.
2.2 Apparatus
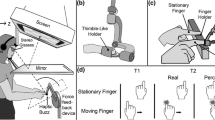
The device (Fig. 1) consists of a rubber belt (7.5\(\,\times \,\)53.3 cm) actuated by a micro motor (Faulhaber 3564K024B CS). The belt has a uniformly-spaced ridged surface, each ridge is 1 mm high, the distance between different ridges being 3 mm. The 3564K024B CS includes an electronically commutated DC-Servomotor, a high-resolution encoder (resolution 3000 Inc./turn) to determine the actual position, and a position and speed controller (recommended max speed: 12000 rpm; the speed ranged from 500 to 3000 rpm in the experiment). We used a custom-made Matlab code to send instructions to the motor. An L-shaped handlebar is attached to the device 60 mm apart from the right roll. There was no measurable slip of the belt during acceleration or when the finger pressed on the belt.

Experimental procedure: The participants compared the speed of motion of the belt between the reference and the comparison stimulus. In K-stimuli, participants maintained the right index finger on a fixed spot of the moving belt (guided movement). In T-stimuli, participants kept the hand on the belt world-stationary; participants placed the finger adjacent to the right side of the handlebar, so as to prevent undesired hand motion. We generated four conditions from the combination of the two stimuli: KT, TK, TT, KK (the first in each condition is the reference stimulus).
2.3 Stimulus and Procedure
Participants sat on an office chair in a dimly illuminated room. The tactile device was placed to the right of the participant; a black curtain hid the device from the participant’s sight. Earplugs and headphones playing pink noise masked the noise generated by the device. In each stimulus interval, the belt moved leftward with respect to the participant, for a constant path length (10.7 cm). The speed of motion was constant within each stimulus, except for the short acceleration/deceleration ramp (duration \(\approx 0.2\,\mathrm{s}\)) respectively at onset and at the offset of the stimulus.
The task consisted of a forced-choice speed discrimination task (Fig. 1). In each trial, participants compared the speed of the belt between the reference and the comparison stimulus (inter-stimulus interval: 2.5 s). Between one trial and the other, participants rested their arm on the handlebar. The plateau speed was equal to \(6\,\mathrm{cm \cdot s^{-1}}\) in the reference stimulus and was pseudo randomly chosen among seven possible values (\(1.67, 3.11, 4.55, 6, 7.44, 8.88, 10.32\mathrm{\,cm \cdot s^{-1}}\)) in the comparison. Each participant performed four experimental blocks (140 trials each) testing the different experimental conditions. In the “kinaesthetic-tactile” condition (KT), participants estimated the reference speed using kinesthetic cues (K), by maintaining the right index finger on a fixed spot of the moving belt (see Fig. 1K). We did not constrain the upper limb movement in K, so as to restrict the tactile input to the index fingertip. Note that, as the task required a guided movement, the estimate of the reference stimulus is provided by both proprioceptive cues and the efferent copy of the motor command. In the comparison stimulus, participants kept the hand world-stationary with the finger in contact with the belt (see Fig. 1T) and estimated the speed of motion from tactile cues (T). The reference and the comparison stimuli were presented sequentially, the order of the two was counterbalanced between trials. Instructions on the computer monitor prompted the participant to perform either the K or the T task. After each trial, participants reported which of the two stimuli moved faster (either the first or the second interval presented), by pressing the right or the left button of a standard computer mouse. No feedback was provided during the experiment. The procedure was the same in the “tactile-kinaesthetic” condition (TK). The only difference was that participants estimated the reference stimulus from tactile cues, and the comparison out of the upper-limb kinematics. As a control, in two separate blocks we performed unimodal speed discrimination tasks (TT and KK); in each of the control tasks, the reference and the comparison stimulus were estimated from the same cues (tactile cues in TT and kinesthetic cues in KK).
2.4 Analysis
We modeled the responses of each participant using the psychometric function defined by Eq. 1:
\(Y_{j} = 1\) if in a given trial \(j\), the participant reported that the speed was faster in the comparison than in the reference and \(Y_{j} = 0\) otherwise. \(P(Y_{j} = 1)\) is the probability of perceiving the comparison as faster and \({\varPhi }^{-1}\) is the probit transform of this probability. On the right side of the equation, \(x\) is the physical speed of the belt in the comparison stimulus and \(\beta _{0}, \beta _{1}\) are the intercept and the slope of the linearized equation, respectively. We applied the model separately in each experimental condition. The point of subjective equality (\(PSE = - \beta _{0}/\beta _{1}\)) is an estimate for the accuracy of the response, while the just noticeable difference (\(JND = 0.675/\beta _{1}\), where 0.675 is the 75 percentile of a standard normal distribution) is an estimate for the precision.
Next, we extended the analysis to the whole population (n = 6) by means of a generalized linear mixed model (GLMM; see [9, 10]). The GLMM is similar to the psychometric function, with the advantage of allowing the analysis of clustered data—as in our case the collection of repeated responses in several participants. We estimated the two parameters (PSE and JND) and the related \(95\,\%\) confidence interval using a bootstrap method, as explained in [9].
If the illusion holds in haptics the same way as in vision, then we expect a relative overestimation of the tactile-based perceived speed compared with the proprioceptive-based perceived speed. Therefore, \(PSE_{KT} < 6\,\mathrm{cm \cdot s^{-1}} < PSE_{TK}\). Finally, we measured the JNDs in the two unimodal conditions, to verify that the discriminability of the stimuli was in accordance with the values reported in the related literature.

(a) The psychometric functions for a representative participant, in the two experimental conditions (gray: KT; black: TK). The reference speed (\(6\mathrm{\,cm \cdot sec^{-1}}\)) is indicated with a dashed line. (b) The point-of-subjective-equality (PSE) in the two experimental conditions (n = 6)
3 Results
Figure 2a shows the perceived speed of the stimulus for a representative participant in the two conditions KT (gray) and TK (black). The PSE is significantly different in the two experimental conditions (\(PSE_{KT} = 5.3 \pm 0.3\), \(PSE_{TK} = 8.0 \pm 0.3, Estimate \pm SE\)). Notice that, in analogy to the visual illusion, \(PSE_{KT} < 6\,\mathrm{cm \cdot s^{-1}} < PSE_{TK}\).
We extended the analysis to all six participants using the GLMM (Fig. 2b). This analysis confirmed the response pattern from the single representative participant. The estimated \(PSE\) is \(5.3\,\mathrm{cm\cdot s^{-1}}\) in KT (\(95\,\%~CI: 4.8-5.8\,\mathrm{cm \cdot s^{-1}}\)), and \(7.5\,\mathrm{cm \cdot s^{-1}}\) in TK (\(95\,\%~CI: 7.0 - 7.9\,\mathrm{cm \cdot s^{-1}}\)). The \(95\,\%~confidence~intervals\) are not overlapping between the two experimental conditions and they are significantly different from the speed of the reference stimulus.
The JNDs in the two unimodal conditions provide an estimate for the discriminability of the two cues. The JND is 1.05 in TT (\(95\,\%~CI: 0.82-1.40\)) and 1.1 in KK (\(95\,\%~CI: 0.84-1.48\)). This corresponds to a Weber fraction of 0.176 and 0.18, respectively. In both conditions, the discriminability of the stimuli was well in agreement with the values reported in the literature (e.g., see [11] for tactile- and [12] for proprioceptive-based discrimination).
4 Discussion
Here, we report a new haptic illusion which is the putative analogue of the Aubert-Fleischl phenomenon. In this experiment, participants overestimated the speed of the moving stimulus determined from tactile cues compared with proprioceptive cues. This result is in agreement with the general view of a weak spatial constancy in haptics [13, 14]. Three hypotheses have been suggested to explain the visual phenomenon: The intrinsic gain, the frequency bias, and the static prior assumption. Testing these explanatory models is beyond the purpose of this study, however, the discussion of the current results may provide indications for future studies. In touch, as in vision, the perceived speed changes with the frequency of the patterned stimulus [6, 15]. Therefore, the frequency bias hypothesis is at least qualitatively in agreement with the results in both modalities. On the other hand, the difference in precision between the tactile and the proprioceptive stimuli was rather small in the current experiment. However, a putative difference in the JND might have been masked by the extra cue provided by the duration of the stimuli (as the path length was constant in our protocol). The two variables that are supposed to generate the illusion (the spatial frequency and the relative reliability of the two cues) can be easily manipulated in haptics. This may offer the possibility to extend the proposed models to a different sensory modality, and, therefore, to test their limits.
References
Wurtz, R.H.: Neuronal mechanisms of visual stability. Vision. Res. 48(20), 2070–2089 (2008)
Aubert, H.: Die Bewegungsempfindung. Pflugers Arch. 39, 347–370 (1886)
Fleischl, E.V.: Physiologisch-optische Notizen, 2 Mitteilung. Sitzung Wiener Bereich der Akademie der Wissenschaften 3, 7–25 (1882)
Dichgans, J., Körner, F., Voigt, K.: Vergleichende Skalierung des afferenten und efferenten Bewegungssehens beim Menschen: Lineare Funktionen mit verschiedener Anstiegssteilheit. Psychologische Forschung 32(4), 277–295 (1969)
Dichgans, J., Wist, E., Diener, H.C., Brandt, T.: The Aubert-Fleischl phenomenon: a temporal frequency effect on perceived velocity in afferent motion perception. Exp. Brain Res. 23(5), 529–533 (1975)
Diener, H.C., Wist, E.R., Dichgans, J., Brandt, T.: The spatial frequency effect on perceived velocity. Vision Res. 16(2), 169–176 (1976)
Freeman, T.C., Banks, M.S., Crowell, J.: Extraretinal and retinal amplitude and phase errors during Filehne illusion and path perception. Percept. Psychophysics 62(5), 900–909 (2000)
Freeman, T.C., Champion, R., Warren, P.: A Bayesian model of perceived head-centered velocity during smooth pursuit eye movement. Curr. Biol. 20(8), 757–762 (2010)
Moscatelli, A., Mezzetti, M., Lacquaniti, F.: Modeling psychophysical data at the population-level: The generalized linear mixed model. J. Vision 12(11):26, 1–17 (2012)
Knoblauch, K., Maloney, L.T.: Modeling psychophysical data in R. Springer, New York (2012)
Bensmaïa, S.J., Killebrew, J.H., Craig, J.C.: Influence of visual motion on tactile motion perception. J. Neurophysiol. 96(3), 1625–1637 (2006)
Lönn, J., Djupsjöbacka, M.: Replication and discrimination of limb movement velocity. Somatosens. Mot. Res. 18(1), 76–82 (2001)
Wexler, M., Hayward, V.: Weak spatial constancy in touch. in: Proceedings of 2011 IEEE World Haptics Conference, pp. 605–607 (2011)
Ziat, M., Hayward, V., Chapman, C.E., Ernst, M.O., Lenay, C.: Tactile suppression of displacement. Exp. Brain Res. 206(3), 299–310 (2010)
Dépeault, A., Meftah, E.-M., Chapman, C.E.: Tactile speed scaling: contributions of time and space. J. Neurophysiol. 99(3), 1422–1434 (2008)
Acknowledgments
This work is supported from the EU FP7/2007–2013 project no. 601165 WEARHAP (WEARable HAPtics for Humans and Robots) and project no. 248587 THE (The Hand Embodied).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Moscatelli, A., Scheller, M., Kowalski, G.J., Ernst, M. (2014). The Haptic Analog of the Visual Aubert-Fleischl Phenomenon. In: Auvray, M., Duriez, C. (eds) Haptics: Neuroscience, Devices, Modeling, and Applications. EuroHaptics 2014. Lecture Notes in Computer Science(), vol 8619. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44196-1_5
Download citation
DOI: https://doi.org/10.1007/978-3-662-44196-1_5
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44195-4
Online ISBN: 978-3-662-44196-1
eBook Packages: Computer ScienceComputer Science (R0)