
Abstract
BeiDou Navigation Satellite System (BDS) has got the ability of real-time navigation and high accuracy positioning services for the Asian-Pacific regions by the end of 2012 with the constellation of 5GEOs + 5IGSOs + 4MEOs. Currently, although BDS can provide positioning service better than 10 m, there remains a problem that the positions calculated with B1 and B2 pseudo-range ionosphere-free combination (BC) are a little worse in accuracy than those obtained from B1 pseudo-range only. This phenomena can be partly explained with the observing errors (white noise and multi-path), and the accuracy of ionosphere model. Besides, the coupled error for BDS satellite clock-TGD would be another important factor. Here we analyze this coupled error and its effect on BDS real-time positioning based on BDS precise clock and BDS satellites DCB provided by GNSS Research Center (GRC), Wuhan University. 12 days’ BDS observations from BeiDou experimental tracking stations (BETS) have been processed and investigated with the precise products by GRC and broadcast ephemeris. Results indicate that the coupled error between BDS broadcast satellite clock and TGD of BC is 5.04 ns, which is about 3 times larger than that of B1 (1.79 ns). And it is a system bias that results BC positioning accuracy worse than that of B1. In additional, by analyzing BDS observations’ multi-path noise, it shows the multi-path noise is one of the facts leading to BDS BC positioning accuracy a litter worse than B1 positioning accuracy. We also find that the receiver noise is the main reason affecting BDS velocity accuracy.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
BeiDou Navigation Satellite System (BDS) built by China independently has got the ability applying standard navigation and precise positioning services for the Asian-Pacific regions since Nov. 27, 2012. Currently, BDS constellation consists of 5GEOs, 5IGSOs, and 4MEOs. According to China government’s plan, the full constellation of BDS will include 5GEOs, 3IGSOs and 27MEOs by the end of 2020, which will provide global navigation service similar to GPS and GLONASS. In additional, BDS adopts China Geodetic Coordinate System 2000 (CGCS2000) keeping compatibility with WGS-84 for real-time navigation, and BeiDou Time System (BDT) with a difference of 14 s and 1,356 weeks comparing to GPST [1]. Currently, meter level (better than 10 m) real-time navigation and centimeter level precise positioning service can be obtained using BDS in Asian-Pacific region. Which is very close to GPS performance [2–4]. However, as reference 4 and 5 indicate, this performance is mainly influenced by the quality of BDS pseudo-range and carrier-phase, and the distribution of BDS DOP. Currently, there two main problems should be answered for BDS’s widely application. One is to find the reason why the BDS’s velocity accuracy is not as good as GPS velocity accuracy in same region. Another problem is to get the answer why there is an abnormal that the standard point positioning (SPP) service of BDS B1 frequency is better than that of B1 and B2 ionosphere-free (IF) combination while using observations collected by same receiver in BDS real-time navigation.
Usually, the multi-path noise of BDS observations is considered as the major facts leading to the abnormal problem in BDS real-time positioning. But we insist there are some other facts in it. That are the accuracy of BDS satellites’ Time Group Delay (TGD) and the coupled error between BDS satellite broadcast clock and TGD. According to Matsakis’s research in 2007 [5], the positioning accuracy of GNSS can be affected by TGD directly. And the influence of Differential Code Bias (DCB) (equal to TGD) to GPS precise positioning is several centimetres [6]. So, if BDS TGD’s accuracy is not high enough, then it will impact on BDS positioning accuracy. Besides, as it knows, BDS satellite clocks are based on B3 frequency, so the coupled error between clock and TGD may be another fact leading to the abnormal problem.
To analyse the reason leading to this abnormal problem in BDS navigation, the BDS data collected by BETS and precise satellites orbit and clock products with interval of 30 s applied by Wuhan University are used in this paper. The coupled error between satellites clock and TGD and TGD accuracy are mainly analysed. Besides, the receiver observing noise and multi-path noise are also analyzed in this paper. Then conclusions about the reason resulting the abnormal problems in BDS real-time navigation application are obtained.
2 BDS SPP Mathematic Model
Usually, pseudo-range and Doppler observation are used in BDS navigation, the observation equations on B1 frequency can be defined as:
where, B1, D1 and \( {{\lambda_{1}}} \) are pseudo-range, Doppler and carrier-phase wavelength of B1 frequency respectively; \( {\uprho} \) and \( {\dot{\uprho}} \) represents distance between satellites and user and pseudo-range rate; c is light speed in vacuum; \( \delta t^{s} \) and \( \delta {\dot{t}}^{s} \) are satellite clock bias and drift; \( \delta t_{r} \) and \( \delta \dot{t}_{r} \) are receiver clock bias and drift; Tgd 1 is the TGD between B1 and B3 frequency; \( \rho_{ion} (\dot{\rho }_{ion} ),\rho_{trop} (\dot{\rho }_{trop} ),\;{\text{and}}\;\rho_{mp} (\dot{\rho }_{mp} ) \) are ionosphere delay, troposphere delay and multi-path (changing rate of these errors); ε B1 and ε D1 are the observation noise and un-modeled errors. Generally, the IF combination function can be expressed as:
To keep consistent in writing with GPS IF combination, Eq. (24.3) can also be written as:
where, \( {\upalpha} = f_{1}^{2} /\left( {f_{1}^{2} - f_{2}^{2} } \right) \), \( {\upbeta} = f_{2}^{2} /\left( {f_{1}^{2} - f_{2}^{2} } \right) \); f 1 and f 2 are the frequency of B1 and B2. For GPS, the satellites clock is calculated based on observations IF combinations. Therefore, the TGD for IF combination has been included in GPS broadcast satellite clock. But BDS satellites clock is calculated based on B3, so while using B1 and B2 observations forming IF combinations, the influence of TGD of B1 and B2 should be considered carefully. What’s more, if there is a coupled error between satellite clock and TGD, this coupled error will be enlarged 1.5–2.5 times while forming BDS pseudo-range IF combination which will impact on BDS IF SPP position accuracy obviously.
2.1 BDS Receiver Noise
Receiver noise is considered as the most important reason leading to BDS low accuracy velocity. So it is necessary to analyze the influence of receiver noise in BDS SPP and velocity. Usually, receiver noise of pseudo-range (B1) and Doppler (D1) can be analyzed by zero-baseline. The function of pseudo-range and Doppler observations can be expressed as:
where, \( \nabla \Delta \) represents double difference; i and j are BDS satellite i and satellite j; m and k represent station m and station k.
2.2 BDS Multi-path Noise
Besides, multi-path is considered as an important reason leading to the abnormal problem in BDS real-time navigation. The function of multi-path of pseudo-range on BDS B1 and B2 frequency can be defined as [1]:
where, L 1 and L 2 represents BDS carrier-phase observations. In Eqs. (24.7) and (24.8), most of the error is eliminated except receiver noise and multi-path. As it knows, multi-path for carrier-phase is very small and receiver noise is white noise. Therefore, Eqs. (24.7) and (24.8) can express the strength of multi-path on B1 and B2 frequency directly. In additional, average value is adopted to eliminate the effect of carrier-phase ambiguity in Eqs. (24.7) and (24.8).
2.3 BDS TGD Analyzing
The accuracy of TGD is very important for BDS SPP service. However, there is no effective method to get the accuracy of TGD in current. Usually, standard deviation (STD) or variance is used to assess satellites TGD accuracy [7]. So, in this paper, the accuracy of BDS TGD will be verified by analyzing the convergence time and initial positioning accuracy of un-differential un-combined Precise Point Positioning with ionosphere-delay and receiver DCB constrained (IC-PPP) [8]. In IC-PPP model, DCB (or TGD) is used to eliminate the time delay caused by satellite hardware. If BDS DCB accuracy is better than TGD, the convergence time and initial positioning accuracy of IC-PPP adopting DCB will be better than that of IC-PPP using TGD. Otherwise, the convergence time and initial positioning of IC-PPP using TGD will be better. Because, PDOP is the same for a group observations, so the convergence time and initial positioning accuracy is determined by pseudo-range quality (DCB or TGD accuracy) directly. In this paper, based on IC-PPP model, we use BDS satellites precise orbit and clock products applied Wuhan University, BDS broadcast TGD and BDS DCB calculated by Wuhan University to analyze TGD’s accuracy.
2.4 Coupled Error Between BDS Clock and TGD
As it knows, GPS satellite clocks are based on pseudo-range ionosphere-free combination. TGD is used to transform the clock bias to L1 for single frequency GPS users. But BDS satellite clocks in the broadcast ephemeris is based on B3. So, while using pseudo-range IF combination for BDS SPP, the TGD for B1 and B2 frequency should be corrected firstly but forming IF combination directly. Therefore, if there is a bias for B1 and B2 satellites TGD, usually the same part (system bias) of satellites TGD will be absorbed by receiver clock in parameters estimating. But the different part will influence BDS SPP accuracy and will be reflected as pseudo-range residual. When using pseudo-range IF combinations for BDS SPP, the influence of the bias will be enlarged about 3 times, which can lead the position accuracy of single SPP better than that of IF SPP.
To research the coupled error between satellite clock and TGD BDS precise orbit and clock based on IF combinations and BDS satellites’ DCB provided by Wuhan University are used as reference. In this paper, the satellite clock and TGD coupled error of B1 and IF combination (BC) is presented mainly. The satellite clock of BDS broadcast ephemeris \( \delta t_{B1,whu}^{s} \) and precise clock \( \delta t_{B1,brdc}^{s} \) on B1 frequency can be written as:
Similarly, BC satellite clock can be expressed as:
where, \( DCB_{B1B2} \) is the DCB between B1 and B2; \( \delta t_{whu}^{s} \) is BDS precise clock based on GPST system which leads to system bias \( d\delta t_{B1}^{s} \) and \( d\delta t_{BC}^{s} \) for B1 and BC clocks while data analyzing, respectively. The difference between precise clocks and broadcast clocks can be written as:
In additional, because the system bias is a constant for each BDS satellites, so it can be absorbed by receiver clock while parameter estimating, and it will have no impact on BDS positioning accuracy. To make data analyze clearly, the constant \( d\hat{\delta }t_{B1}^{s} \) for B1 frequency can be eliminated by Eq. (24.12):
And similarly, the constant \( d\hat{\delta }t_{BC}^{s} \) can be ignored by Eq. (24.13):
Then, the satellite clock and TGD coupled error of B1 and BC can be obtained by the statistics result of Eqs. (24.12) and (24.13).
3 Data Analyzing
Based on mathematic model presented above, we processed some BDS data between day of year (DOY) 139 and 150 in 2013 collected by BETS equipped with Unicore UR-240 receiver. The detail information are shown in Table 24.1 and BDS constellation with 5GEOs, 5IGSOs, and 4MEOs are shown in Fig. 24.1. The data will be processed as follow schemes.

BDS satellites constellation with 5GEO + 5IGSO + 4MEO
-
1.
Adopting zero-baseline model, analyse receiver noise of Trimble R9 and UR-240.
-
2.
According to Eqs. (24.7) and (24.8), analyse multi-path noise of Beijing and Wuhan station.
-
3.
Using IC-PPP model and BDS precise products, analyse the accuracy of BDS TGD.
-
4.
Following Eqs. (24.9)–(24.13), analyse the accuracy of BDS orbit, TGD, and the coupled error between clock and TGD, and it impact on BDS SPP performance.
While data processing, the observations with satellite elevation low than 10° are ignored and observation error source including troposphere delay, ionosphere delay, pseudo-range time group delay, earth rotation, relativity, satellite clock and receiver clock are considered.
3.1 BDS Receiver Noise
As it knows, all the observing errors are eliminated in zero-baseline except receiver noise. As Figs. 24.2 and 24.3 showing, UR-240 receiver’s pseudo-range noise and Doppler noise are 0.657 and 0.175 m, respectively. R9 receiver’s pseudo-range noise and Doppler noise are 0.365 and 0.037 m. Obviously, UR-240 receiver noise is much larger than that of R9, especially the Doppler noise. That means the quality of UR-240 observations is lower than that of R9. And it will lead to BDS navigation result using UR-240 observations worse than the result using R9 observations, especially for BDS velocity.

RMS of B1 pseudo-range observations noise for UR-240 receiver and R9 receiver (unit: meter)

RMS of D1 doppler observations noise for UR-240 receiver and R9 receiver (unit: meter)
Figure 24.4 shows BDS velocity accuracy in static using UR-240 observation and R9 observation, respectively. The velocity RMS of UR-240 receiver in North, East, and Up is 0.219, 0.098, and 0.273 m/s. And R9 receiver’s velocity RMS is 0.054, 0.014, and 0.083 m/s for North, East, and Up component respectively. According to Eq. (24.2), the accuracy of BDS velocity depends on Doppler’s quality directly. Therefore, the reason why UR-240 receiver’s velocity accuracy is worse than R9’s is because UR-240 Doppler noise is larger than R9 Doppler noise.

BDS velocity accuracy calculated by receiver UR-240 and R9 in static
3.2 BDS Multi-path Noise
To analyse the impact of multi-path noise on BDS SPP positioning accuracy, Beijing (BJ) and Wuhan (WH) station BDS observations are processed in same way. Table 24.2 shows BDS SPP positioning accuracy of Beijing and Wuhan station using BC and B1 observation respectively. In Beijing station, B1 pseudo-range position accuracy (95 %) is 4.871 and 8.464 m in horizon and 3D component. While using BC combination, the position accuracy is 8.079 and 12.632 m in horizon and 3D component. In Wuhan station, B1 pseudo-range position accuracy (95 %) is 5.215 and 10.882 m for horizon and 3D component. While using BC combination, the position accuracy is 5.699 and 8.993 m for horizon and 3D component, respectively. Obviously, the positioning accuracy of BC is worse than B1 positioning accuracy. But in Wuhan station, the positioning accuracy of BC is better than that of B1. In additional, the PDOP of Beijing (2.858) is very close to Wuhan PDOP (2.679). Besides, the receiver used in both Beijing and Wuhan station is UR-240. Reasonably, the effect of PDOP and receiver noise on BDS positioning accuracy can be ignored. Therefore, the multi-path must be the most possible fact leading the abnormal positioning results in Beijing station.
According Eqs. (24.7) and (24.8), BDS satellites multi-path noise of Beijing and Wuhan station is calculated and its statistics results are shown in Fig. 24.5. Clearly, the multi-path noise in Wuhan station is lower than that of Beijing station. In Beijing station, the multi-path noise for B1 and BC pseudo-range is 0.786 and 2.244 m. And the multi-path noise for B1 and BC is 0.431 and 1.136 m in Wuhan station. Obviously, the ionosphere-free combination makes multi-path noise 3 times bigger than that of B1. Besides, the multi-path noise of both B1 and BC in Beijing station is about 2 times bigger than that of Wuhan station. Which leads the position accuracy of BC in Beijing is worse than B1 positioning accuracy directly. Meanwhile, because the multi-path noise of Wuhan station is very low (very close to receiver noise) and ionosphere-free combination can ignored first order ionosphere delay completely. So, Wuhan station’s BC 3D positioning accuracy is improved obviously comparing to B1 3D positioning accuracy.

Multipath noise for BC combination and B1 frequency of BDS in Beijing and Wuhan station
3.3 BDS TGD Accuracy
Because the convergence time and initial positioning accuracy of IC-PPP is affected by pseudo-range quality directly. Therefore, while using TGD applied by BDS and satellite DCB applied by Wuhan University in BDS IC-PPP respectively, if IC-PPP adopting DCB needs less convergence time and expresses better initial positioning accuracy, it means TGD accuracy is worse. Otherwise, BDS TGD accuracy is better. According to the result showing in Fig. 24.6, in Beijing station the convergence time of IC-PPP using DCB applied by Wuhan University is 1.76 h less than IC-PPP using BDS TGD (4.23 h). Meanwhile, the initial positioning accuracy of IC-PPP using DCB is 2.0 m better than IC-PPP using TGD (5.0 m). It illustrates that BDS satellites’ TGD accuracy is high enough currently and it can be improved better and better in the feature.

Impact of BDS TGD on positioning accuracy and convergence of BDS IC-PPP
3.4 Clock and TGD Coupled Error
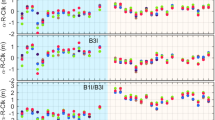
Coupled error between satellite clock and TGD and satellite orbit accuracy are another facts affect BDS SPP positioning accuracy. As Fig. 24.7 shows, the orbit accuracy of IGSO and MEO is better than 2.0 m in X–Y–Z components. GEO orbit accuracy is a litter worse, especially satellites C01 (25.93 m), C02 (8.39 m) and C04 (11.04 m). All BDS satellite orbit accuracy in Radial direction is better than 0.5 m, except GEO C03 (0.982 m) and C05 (0.744 m). Figure 24.8 shows the coupled error of B1 and BC between BDS satellite clock and TGD. The statistics illustrate that the RMS of B1 satellite clock is 3.719 ns, and the RMS of BC satellite clock is 7.842 ns. Obviously, there is a same system bias for both B1 and BC satellite clock. Usually, the system bias can be absorbed by receiver clock while parameter estimation and will have no effect on BDS positioning accuracy. But the coupled error of both B1 and BC satellite clock expressed as STD in Fig. 24.8 will affect BDS SPP positioning accuracy. As results show, the coupled error of B1 is 1.794 ns (0.54 m), and the coupled error of BC is 5.401 ns (1.62 m). Clearly, the coupled error of BC is about 3 times bigger than that of B1. And it can be an important fact that leads to BDS BC positioning accuracy worse than B1 positioning accuracy.

BDS’s orbit accuracy of broadcast ephemeris

BDS clock-TGD coupled error on BC combination and B1 frequency
4 Summary
In this paper, we focus on the abnormal problem that leads to BDS B1 positioning accuracy better than BC positioning accuracy. By analysing receiver noise, multi-path noise, BDS satellite orbit accuracy, and coupled error between satellite clock and TGD, the results illustrate that:
-
1.
BDS has the ability to provide SPP positioning result better than 10 m and provide velocity result better than 0.1 m/s, currently.
-
2.
The velocity accuracy of BDS is affected by receiver Doppler noise. As shown in this paper, the Doppler noise of UR-240 is larger than that of R9. Which leads to the velocity accuracy of UR-240 lower than that of R9. It expresses that BDS provide velocity accuracy better than 0.1 m/s if receiver Doppler noise is not too large.
-
3.
Multi-path noise is one of the facts leads to BDS BC positioning accuracy worse than B1 positioning accuracy.
-
4.
The accuracy of BDS satellite orbit is better than 2.0 m in X–Y–Z component and better than 0.5 m in Radial direction. And GEO satellites orbit accuracy is not good enough.
-
5.
The accuracy of BDS TGD is not high enough, and it leads to the coupled error between satellite clock and TGD of BC (5.041 ns) is about 3 times larger than that of B1 (1.794 ns). And it is an important facts leading to BDS B1 positioning accuracy better than BC positioning accuracy.
References
Shi C, Zhao Q, Hu Z et al (2013) Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solutions 17(1):103–119
Zhou S, Gao Y, Zhou J et al (2012) Positioning accuracy assessment for the 4GEO/5IGSO/2MEO constellation of COMPASS. Sci China Phys Mech Astron 55(22)
Montenbruck O, Hauschild A, Steigenberger P et al (2012) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solutions 1–12
Yang YX, Li JL, Wang AB et al (2013) Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci China Earth Sci 1–9
Matsakis D (2007) The timing group delay (TGD) correction and GPS timing biases. In: Proceeding of the 63rd annual meeting of the institute of navigation, Cambridge, MA
Ruan R (2009) Study on GPS precise point positioning using un-differenced carrier phase. PLA Information Engineering University
Xing N, Wu X, Hu X, et al. (2012) Secular changes in differential code bias of COMPASS system. In: China Satellite Navigation Conference (CSNC) 2012 Proceedings Lecture notes in electrical engineering, vol 160. pp 243–251
Zhang H, Gao Z, Ge M et al (2013) On the convergence of ionospheric constrained precise point positioning (IC-PPP) based on undifferential uncombined raw GNSS observations. Sensors 13:15708–15725. doi:10.3390/s131115708u
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Gao, Z., Zhang, H., Zhao, Q., Hu, Z., Shen, W. (2014). Analyzing the Impact of Satellite Clock-TGD Coupled Error on BDS Positioning Accuracy. In: Sun, J., Jiao, W., Wu, H., Lu, M. (eds) China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume I. Lecture Notes in Electrical Engineering, vol 303. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-54737-9_24
Download citation
DOI: https://doi.org/10.1007/978-3-642-54737-9_24
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-54736-2
Online ISBN: 978-3-642-54737-9
eBook Packages: EngineeringEngineering (R0)