
Abstract
The state of change (SOC) is used to describe the remaining capacity of battery and its accuracy is very important for power battery. In this paper, according to the composite method, the dynamic system model is established, combining with the ampere hour integral method revised by the compensating factor and the equivalent circuit model. After that, the system state equation and observation equation is introduced. At the same time, the Kalman filtering achieves the minimum error of SOC estimation value. The SIMULINK tool is used to establish the mathematical model of dynamic system. The simulation results show that the composite method can monitor the battery SOC in real-time. Its accuracy can keep the error within 4 %, which is good practical value in the estimate of power battery SOC under the complex operating condition.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Power lithium battery is a key to the electric vehicle. The state of change (SOC) reflects the remaining capacity of battery. So accurate estimating the SOC value is vital to the battery management system, and it is also one of the important basis for control the EV. Due to the electrochemical properties of battery is very complicated. It shows highly nonlinear in the process of charging and discharging. And the influences of current, temperature and charge–discharge cycle make higher difficulty to accurately estimate SOC value. In order to improve the accuracy of estimation, the previous papers took into account the compensation of the charge–discharge efficiency, temperature, aging and other factors in the model algorithm [1]. Nevertheless, a single model to describe the cell dynamic characteristics is rather difficulty and some errors. So the battery SOC estimation has become the difficulty to the battery management system [2].
The traditional SOC estimation methods, such as ampere hour integral method, the open circuit voltage method and impedance method, have their own shortcomings. So the researchers pay more attentions on the new methods to estimate SOC value.
The mathematical method to complex dynamic system model is effective, and also can revise the error in a certain degree. Based on the principle of Kalman filtering [3], it combines with Ah integral method and open circuit voltage method to establish filtering system, so as to realize the composite estimation method.
2 The Principle of Composite Method
The composite method of SOC estimation mainly embodied in two aspects: firstly, estimation method relies on the accurate dynamic cell model; secondly, it can be applied to real-time estimation the SOC value. The compound method based on Kalman filtering is appropriate for relative complex condition, and can more fully simulate the power battery operating characteristics. A dynamic model to estimate SOC value is proposed.
2.1 Ampere-hour Integral Method
Ah integral method estimates the battery SOC through the accumulation power in charge or discharge. It is one of the most simple and commonly used methods at present. The formula of Ah integral method is:
where SOC (t0) is the battery SOC value of initial state, C is the rated capacity, η is the correction coefficient about the temperature, the discharge rate and the number of cycles.
The ampere-hour method estimates SOC value. It is an easy and stable algorithm. The defect is needed to calibrate SOC initial value; and η is not constant under the different discharge conditions; there has a certain error in high temperature and current fluctuation severe situation [4].
2.2 Open Circuit Voltage Method
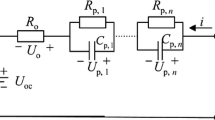
Open circuit voltage method under a certain condition uses the relationship between the SOC and OCV. The dynamic SOC estimation accuracy depends on the power cell model. To establish the mathematical model of the lithium cell requires identifying the parameters, and then building the relationship of equivalent circuit model. The formula of the OCV is:
where U oc is the battery terminal voltage of one cell, x k is value in different conditions of the SOC, and R is the battery internal resistance (differed values in different charging and discharging status and different SOC). K1 is the polarization effect of equivalent resistance. K2, K3 and K4 is the model matching parameters [5].
This method needs a rest time in measuring the OCV to ensure the SOC value accurately. So it does not apply to real-time estimation for electric vehicle.
2.3 The Principle of Kalman Filtering Method
Kalman filtering method is introduced into the system state space model [5, 6]. The State equation describes the state and variation; it gives the mathematical model of the changing of state transition in adjacent time. The measurement equation describes the information of the measurement state, usually containing observation noise.
Kalman filtering problem is to find the optimal estimation of the system state, based on the obtained information from the measurement equation.
For a discrete time process of state variable, the system state equation is:
Definition of system measurement equation is:
where the SOC value is the system state variable x k , the vector u k is the input, including the factors, such as the power battery current, temperature and discharge ratio. And the vector y k is the measuring value.
The optimal estimation is the core part of the Kalman filter algorithm, which is revised by the difference between the measured and predicted measurement y k . So the quantity of state x k is closer to the real value in this system. And optimal estimate equals to the prior estimation value and algorithm correction [7].
To illustrate this optimal estimation, consider the linear discrete-time system block diagram in Fig. 27.1.

The principle of optimal estimation block diagram
3 The Framework of Model
What this work does is taken (27.1) of Ah integral equation as the system state equation and (27.2) of equivalent circuit equation as measurement equation [8].
-
1.
According to the SOC estimation value at K − 1 time, update the SOC prior estimation at the time K by (27.5);
-
2.
According to the prior estimation of SOC, update the prior voltage estimation at time K by (27.6);
-
3.
The formula (27.7) is equation of the algorithm correction, which is the product of filter gain Kk and prediction error. The prediction error is the difference between the measurement value of terminal voltage and its prior voltage estimation at time K.
-
4.
According to the vectors of formulas (27.5–27.7), updating formula (27.8), it can obtain the SOC estimation value at time K and output this value.
Output value at time K, and take it as the initial estimation at time K + 1, we can get the SOC prior estimate at time K + 1. Through this circle from prediction to update, it can get every moment for SOC filter estimation value [9].
where \( x_{k - 1|k - 1} \) is the SOC estimation, \( x_{k|k - 1} \) is the SOC priori estimation at time K, \( y_{k} \) and \( y_{k|k - 1} \) are the terminal voltage and the prior voltage estimation at time K, \( u_{k - 1} \) is the input at time K − 1. w k and v k are the incentive noise and observation noise. They are both normal distribution of white noise.
The composite algorithm updates the SOC estimation value, and at the same time, takes the minimum error covariance of the system state as the best standards to correct the SOC estimation value [10].
Formula 27.9 is the Kalman filter gain matrix K k , whose role is to make the system’s estimation error covariance minimum.
Formula 27.10 is the measured value matrix:
Formula 27.11 is the prior estimation covariance matrix:
Formula 27.12 is the optimal filtering error covariance update:
4 Simulation and Results
The SIMULINK tool is used for the simulation. The mathematical model is established, on the basis of the composite method. The structure diagram of the model is shown in Fig. 27.2. During the simulation, it simulates the process of discharge with 1C pulse rate, and the discharge current waveform is shown in Fig. 27.3.

The SOC estimation model based on composite method

The waveform of discharge current
Figure 27.4 is the voltage of the storage battery varies with time. After 600 s, the battery terminal voltage is stabilized, and fluctuates within a certain range. For the storage battery maintains at a stable voltage state.

The terminal voltage of the cell
Figure 27.5 shows the difference of SOC value between the composite method and the single Ah integral. Comparing the data, it finds that the composite method based on Kalman filtering method is more accurate in real-time estimating cell SOC value.

The comparison of the two estimation methods
Figure 27.6 shows the SOC relative error by the composite method. It display the maximum relative error about 4 %. This may be the reason that the relationship between the OCV and SOC is not very clear in discharged interim at that time, and so the error is larger [11].

The relative error of SOC estimation value
5 Conclusion
The paper outlines the composite method used in the SOC estimation of power lithium battery. The temperature and current of cell, as well as theirs correction coefficients are as the system input. The previous moment estimation of SOC is as the system state quantity to estimate SOC value at the next moment. Meanwhile, the terminal voltage of cell is estimated by the open-circuit voltage method. Thus, we make use of the error covariance of the estimated and measured value to revise the SOC estimation. It tests and verifies that the result of simulation experiment is less than 4 % of the estimation error.
References
Huang WH, Han XD, Chen QS, Lin CT (2007). A study on SOC estimation algorithm and battery management system for electric vehicle. Automotive Engineering 29(3):198–202 (in Chinese)
Piller S, Perrin M, Jossen A (2001) Methods for state-of-charge determination and their applications. J Power Sources 96:113–120
Salameh ZM, Casacca MA, Lynch WA (1992). A mathematical model for lead-acid batteries. IEEE Trans Energy Convers 7(1):93–98
Do DV, Forgez C, Benkara KEK, Friedrich G (2009) Impedance observer for a Li-Ion battery using Kalman filter. IEEE Trans Veh Technol 58(8):3930–3937
Li C (2007) Study on parameter identification and SOC estimation of Ni/MH battery for EV. Tianjin University, Tianjin (in Chinese)
Plett GL (2004) Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs Part 3. State and parameter estimation. Power Sour 134(2):277–292
Bozic SM (1984) Digital filtering and Kalman filtering. 2nd edn. Science Press, Beijing (in Chinese)
Plett GL (2004) Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs Part 2. Modeling and identification, Power Sources 134(2):262–276
Plett GL (2002) LiPB dynamic cell models for Kalman-filter SOC estimation. In: Proceedings of the 19th international battery, hybrid and fuel cell electric vehicle symposium & exhibition (EVS19), pp 19–23
Knauff M, Dafis C, Niebur D (2010) A new battery model for use with an extended Kalman filter state of charge estimator. In: American control conference (ACC), pp 1991–1996
Lin CT, Wang JP, Chen QS (2004) Methods for state of charge estimation of EV batteries and their application. Battery 34(5):376–378 (in Chinese)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zhang, D., Zhou, Y. (2013). State of Charge Estimation Based on a Composite Method for Power Lithium Battery. In: Lu, W., Cai, G., Liu, W., Xing, W. (eds) Proceedings of the 2012 International Conference on Information Technology and Software Engineering. Lecture Notes in Electrical Engineering, vol 211. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-34522-7_27
Download citation
DOI: https://doi.org/10.1007/978-3-642-34522-7_27
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-34521-0
Online ISBN: 978-3-642-34522-7
eBook Packages: EngineeringEngineering (R0)