
Abstract
This paper presents the technology trends for wireless power transfer (WPT) for electric vehicles (EV), and analyzes the factors affecting its power transfer efficiency (PTE) and describes the techniques currently used for its optimization. The review of technology trends encompasses both stationary and moving vehicle charging systems. The study of the stationary vehicle charging technology is based on developments at WiTricity and Oak Ridge National Lab (ORNL). The moving vehicle charging technology is primarily described through the results achieved by the Korea Advanced Institute of Science and Technology (KAIST). The factors affecting the PTE are determined through the analysis of the equivalent circuit of magnetic resonant coupling. The air gap between both transmitting and receiving coils along with the magnetic field distribution and the relative impedance mismatch between the related circuits are the primary factors affecting WPT efficiency. Currently the industry is looking at an air gap of 20 cm or below. To control the magnetic field distribution, KAIST has recently developed the Shaped Magnetic Field In Resonance (SMFIR) technology that uses optimized shaped ferrite material to provide a low reluctance path or maximum exposure of the magnetic field to the resonant coils. The PTE can be further improved by means of impedance matching. As a result, Delphi’s current implementation of WiTricity’s technology exhibits WPT efficiency above 90 % for stationary charging with power capacity of 3.3 kW, while KAIST has demonstrated a maximum efficiency of 83 % for moving vehicle with its On-Line Vehicle (OLEV) project with the power capacity of 100 kW.
F2012-B06-001
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The growth of vehicle electrification is fostering the development of efficient and operation-friendly charging systems. However, the battery cost and range (BCR) equation remains the primary impediment to mass adoption of EV. Currently all EV and Hybrid Electric Vehicles (HEV) are commercialized with on-board conductive charging systems. Though this charging technology clearly meets the efficiency requirements with power transfer ratio virtually equal to 100 %, the need for handling the charging cable and accessories makes it mildly operation-friendly, and has inherent safety concerns. Moreover, it fails to provide a viable solution to the BCR equation without requiring tremendous progress in battery technology.
Over the past decade, research institutions such as Massachusetts Institute of Technology (MIT) [1] and Oakridge National Lab (ORNL) [2, 3], have demonstrated the feasibility of wireless charging by means of magnetic resonant coupling through laboratory demonstrations and scientific publications. This novel technology is commonly known as wireless power transfer (WPT). WiTricity is working to commercialize a WPT-based deployment kit for EVs [4]. Delphi is working with several OEMs on pilot programs aimed at an automotive grade implementation of the WiTricity solution [5]. These activities support stationary vehicle charging (SVC), however, they are paving the way for a battery-independent solution to the BCR equation through dynamic vehicle charging (DVC). Since 2009, KAIST has worked to develop DVC technology [6], and introduced the concept of On-line Electric Vehicle (OLEV) in 2010, which has selected by Time magazine as one the 50 Best Inventions of 2010 under the name of “Road-Embedded Rechargers” [7].
With the appropriate infrastructure (e.g. charging coil buried in the roadbed) enabling much shorter but more repetitive charging, DCV-equipped EV will have today’s range with a fraction of the battery capacity. This paper highlights key insights for understanding the technical and business challenges and opportunities pertaining to wireless charging.
2 Wireless Power Transfer
2.1 Basic Principle
Figure 1 displays a simplified representation of WPT-based stationary vehicle charging.

Stationary vehicle charging: basic principle
For simplification purposes, we focus on the equivalent circuit of the entire charging system as sketched in Fig. 2 that involves the equivalent circuit of a transformer. U s is the voltage delivered by a power voltage source operating at the angular frequencyω. C 1 and L 11 are the transmitter (or primary) coupling capacitor and inductance respectively, whereas C 2 and L 22 are the receiver (or secondary) parallel capacitor and inductance respectively. The primary resistive portion is the series combination of the WPT charger source resistance r g and the overall ohm loss r s . The secondary resistive circuit comprises the load R L along with the overall ohm loss r 2 . M is the mutual inductance of the charging system equivalent transformer.

Charging system equivalent circuit: (a) with system components; (b) with equivalent impedances
2.2 Resonant Coupling
For further analysis, let’s represent the series combination of C 1 and L 11 by the equivalent impedance Z 1 , and the series combination of C 2 and L 22 by Z 2 , as well as the mutual inductance by Lm. For additional simplification of the analytical process, we make the assumption that both primary and secondary impedances are identical, that is: C 1 = C 2 = C and L 11 = L 22 = L. Thus,
As a result, both primary and secondary resonators have the same natural resonance angular frequency
The application of Kirchhoff’s voltage law around the primary and secondary loops leads to the equation of the charging output voltage V 2 that can be maximized at two resonant angular frequencies \( \omega_{m} \)(known as magnetic resonant frequency below) and \( \omega_{e} \)(known as electric resonant angular frequency above) respectively equated by:
Where, k is the magnetic coupling factor equated by
The terms below and above are explained by the double inequality
2.3 System Efficiency
The determination of the system efficiency requires the identification of the value of the magnetic coupling factor k as well that of the coupling capacitor C, and the inductance L derived from the geometry of the transmitting and receiving coils in factoring the relative permeability of the linkage medium.
3 Automotive and Transportation Applications
3.1 Stationary Vehicle Charging Systems
3.1.1 Delphi
Delphi has been collaborating with WiTricity since 2010. WiTricity commercializes the wireless power technology invented at MIT [1]. WiTricity has over 270 patents and patent applications worldwide that include highly resonant non-radiative magnetic field coupling (HRNRMC) as well as energy transfer system improvements. Delphi has developed a HRNRMC-based WPT stationary charging system that is capable of delivering 3.3 kW (Level 2) with up to 20 cm ground clearance that is highly efficient up to 90 % from AC main to the vehicle battery and is well tolerant to parking misalignment (±20 cm in vehicle side to side axis). Delphi is able to further reduce capture coil size to improve vehicle fitment, with a moderate diminution of lateral tolerance that can be managed with simple driver assistance mechanisms commonly used in the industry. Using a High-Q Magnetic Resonant system Delphi is able to optimize vehicle components size and mass reducing the secondary coil that is mounted on the vehicle to approximately 30 cm × 30 cm × 3 cm and weighs less than 5 kg (Fig. 3).

Delphi WPT charging system left: residential charging controller. Middle: floor-based source resonator. Right: source/capture resonator pair
3.1.2 Korea Advanced Institute of Science and Technology
KAIST developed an application model to apply WPT to stationary charging.
During the Phase 1 development period, 2010–2011, the static charging system achieved 80 % PTE with a power pick-up capacity of 30 kW, equipped on a micro bus as shown in Fig. 4. The system incorporates an electricity billing system through an interactive touch-screen.

KAIST stationary WPT charging system KAIST phase 1 phase 2
The Phase 2 development of an SUV resulted in achievement of 93 % PTE with a ground height of 6 cm and a power capacity of 25 kW per pick-up unit.
3.1.3 Oakridge National Lab
ORNL has developed stationary WPT charging of a PEV at SAE Level 2 power of 6.6 kW using coupling coils fabricated with five strands of 14 AWG Litz cable in parallel and a soft ferrite back plane design. Figure 5 shows the coupling coils in a laboratory text fixture having adjustable standoffs for the secondary coil. Magnetic finite element analysis was employed to analyse the coupling field, side and backplane emissions levels, and coupling coefficient, k.

Distributed winding coupling coil set and FEA analysis
Coupling coil efficiency is shown at the single damped resonant peak at approximately 23 kHz and efficiency of 96 % when S–P is tuned to approximately 22 kHz. In these tests the high frequency (HF) power inverter is operated at low rail voltage resulting in an additional reduction in DC–DC efficiency due to the low voltage operation (~70 V) of 600 V IGBTs.
3.2 Dynamic Vehicle Charging System
3.2.1 Korea Advanced Institute of Science and Technology
An OLEV system is comprised of the power supply system as a part of a paved road installation and the electric vehicle equipped with power pick-up modules. On a closed travel route, the powered road distance is limited to approximately 20 % of the total travel distance, and the battery supplies the driving energy to the motor of the electric vehicle across the non-powered or standard road surface. The battery’s energy storage capacity is reduced to 1/5th the size of a standard EV in most cases. As a result of this, the powered road length, battery size, and pick-up power capacity for a given motor size become design variables for optimization dependent on the application rather than design constraints as the case for a standard EV. The communication between the road installation and the power supply controller is performed through magnetic transmission. In addition, the powered track can be an add-onto an established road system, or included as part of a new road construction. The schematic architecture of an OLEV system is shown in Fig. 6.

Complete OLEV system architecture: vehicle and power supply system
OLEV power supply system or powered road is composed of a set of power tracks throughout the vehicle travel road. A powered track is composed of a set of segments, which can have different lengths, controlled by a set of power inverters through a switch box. An example of a powered track layout consisting of six segments is shown in Fig. 8. Between each segment, there can be enough distance to accommodate road crossings such as bridges or pedestrian crossings. In Seoul Grand Park, where the first prototype in public demonstration is installed, the first segment is 2.5 m long while the other five segments are 25 m each. The distance between each segment varies from 3 m to 100 m. In addition, the distance from the power track has no limitation in view of installations as long as the inverter is placed properly. In optimizing the design of the power supply and the pick-up system, the PTE has reached the maximum value of 83 % with an air gap of 20 cm a misalignment tolerance of ±20 cm leading to half of the transmitted power (Fig. 7).

Example of a powered track layout
3.2.2 Oakridge National Lab
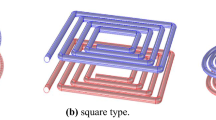
ORNL successfully demonstrated dynamic WPT charging of an electric vehicle using embedded primary coils in June 2012. In this application, specially designed coils were developed to be embedded into existing roadway pads containing each a pair of coils. ORNL’s early in-motion work was based on large area rectangular geometry (a = 1 m × b = 0.8 m) copper tube coils. [8].
4 Power Transfer Optimization
There is considerable literature on WPT that spans coupling coil design [9–11], inverter design including soft switching and very high frequency operation [12, 13], and system control and optimization [14–16]. As discussed in Sect. 2.2, the WPT charging system exhibits two resonances (see Fig. 9) whose responses are affected by the primary resistance R 1 = r s + r g and the secondary load R L (refer to Fig. 2a) whose value affects the primary and secondary quality factor Q1 and Q2.

Resonance behaviour vs. primary and secondary load when f0 ~ 22 kHz
5 Alignment Tolerance
For non-optimized resonance control, alignment of the vehicle mounted secondary coil with a floor or roadway primary coil is critical to optimal PTE and minimization of emissions. For example, 50 % aligned coils will have high fringe fields and also much higher than desired fields in the secondary back plane. As a result, in non-controlled quality factors charging mode, the alignment tolerance can be as stringent ±25 mm in both x-axis and y-axis, across the vehicles longitudinal and lateral axes respectively.
6 End to End Optimization
The left hand side of Fig. 9 provides the breakdown for the power transfer efficiency [17]. While the conducted linkages (i.e. source electronics and device electronics) offer a combined efficiency greater than 94 %, the total transfer efficiency is dictated by the performance of the wireless coupling. Under HRNRMC (see Sect. 3.1.1), the wireless efficiency η is a function of the figure of merit U [18] that can be controlled through impedance matching and power factor control. This leads to a much higher misalignment tolerance (i.e. ±20 cm in vehicle side to side axis) and a wireless efficiency of 90 % or higher.

Left: efficiency distribution. Right: wireless efficiency η and figure of merit U
6.1 Shaped Magnetic Field in Resonance
6.1.1 SMFIR® Technology and Wireless Charging System [19]
KAIST has developed SMFIRⓇ technology enables to charge wirelessly at stationary and/or in driving motion efficiently. The pick-up device is a T-shaped iron core with turned coil sets in the middle. The induced electromagnetic field shape can be controlled by the layout of the ferrite core in the power supply and the pick-up sides, air gap, core-to-core distance and the tuned coils in the pick-up.
7 Industry Trends
7.1 Practical Challenges
Given potential liability issues and the relatively low penetration of EV/HEV cars, the development of the WPT charging technology is highly dependent upon OEMs and on-going standardization works. Each OEM is in a different phase of adoption coping with issues such as location, form factor, operating frequency, and user’s safety. The multiplicity of operating frequencies poses the problem of charging station interoperability.
The different agents of the WPT charging value chain (see Sect. 5.3.3) in various cooperation pools to resolve the above challenges.
7.2 Operating Frequency Criteria
The magnetic resonance technology is applicable across the kHz–MHz frequency range. The choice of frequency depends on factors such as device size, component performance, EMC/EMI concerns. The general trend is: the higher the frequency, the higher the quality factor, the higher the efficiency for a smaller device size. As discussed above, frequency-agnostic solution needs to be investigated for ensuring interoperability.
7.3 Commercialization Readiness
7.3.1 Standardization
There are four critical areas where standardization is required: (1) Transmitter configuration and form factor; (2) Receiver location in the vehicle; (3) Communication protocol between on and off-board electronics; and, (4) Operating frequency. With these four interfaces standardized, any vehicle from any manufacturer in a given region will be able to wirelessly refuel their electrified vehicle’s battery via stationary or dynamic charging installations.
The following standardization committees are working for addressing these areas: SAE J2954, IEC 61980-1 Electric vehicle inductive charging systems, ISO/IEC 15118 Communication Interface between the vehicle and the grid, IEC 61851 Communication protocol between off-board inductive charger and electric vehicle.
7.3.2 Regulation
The American National Standards Institute, ANSI, is active into support WPT deployment, along with IEC, SAE, IEEE and UL and others. Relevant existing standards include SAE J1772 for alternating current charge coupler (being modified to include dc fast charging), and IEEE P2030.1 covering electric sourced transportation infrastructure.
Regulation is needed to address safety, EMF, EMC/EMI, and grid interfacing issues.
In the U.S. the National Institute for Science and Technology (NIST) has been charged with leading the coordination of smart grid standards activities. Underwriters laboratories (UL) has already standardized EVSE (UL2594, UL2251), protection systems (UL 2231-1, -2), smart meters (UL 2735) and charging equipment for wireless chargers (UL 2750).
WPT systems under commercialization globally are being designed to limit electromagnetic field exposure to below limits set by the International Commission on Non-ionizing Radiation Protection (ICNIRP-2010). The new guideline limits peak exposure to 27 uT over the range 3 kHz to 100 kHz and special averaging to within a maximum of 6.25 uT. A more comprehensive definition of EMF exposure must wait until standards setting organizations—now evaluating WPT—define the measurement points and special averaging technique.
7.3.3 Business models
Wireless charging technology is in its infancy stage. Multiple competitors across the world are positioning to capitalize on its growth with opportunities at varying levels of commercialization. There are prospects ranging from universities to start-up companies with little or no automotive experience to Tier-1 automotive suppliers who license the technology and commercialize it for the automotive environment. Delphi’s business model is based on upstream and downstream partnership involving game changing technology providers along with forward thinking OEMs that understand that WPT is uniquely positioned for alleviating the concerns regarding the BCR equation through stationary charging in the medium run, and for effectively solving it in the long run through the ultimate adoption of the technology of dynamic vehicle charging. The following value chain (see Fig. 10) can be used to derive different business models that can be either OEM or aftermarket driven.

Wireless charging value chain
8 Conclusion
This paper is the result of a team effort led by engineers, researchers, and innovation leaders at Delphi, WiTricity, KAIST, and ORNL. Each of these organizations is pioneering wireless power transfer for passenger electrified vehicles and/or ground mass transportation in the context of stationary or dynamic vehicle systems. Their respective experience has been described through past and on-going projects such as Delphi and WiTricity cooperation for automotive applications, KAIST’s OLEV implementation, and ORNL’s fundamental research projects both in stationary and dynamic charging techniques.
A review of the related technology trends has highlighted key factors affecting the charging efficiency such as alignment tolerance, magnetic field coupling, impedance mismatch and operating frequency. The basic principles of two related proprietary solutions were discussed. The end to end optimization is reliant on strongly-coupled resonance for mid-range wireless non-radiative energy transfer whereby misalignment and increased distance between transmitting and receiving coils can be compensated in controlling the figure-of-merit through impedance matching and the enhancement of both the source resonator and device resonator quality factors respectively at the resonance frequency. Another alternative is the shaped magnetic field in resonance that takes advantage of the magnetic field channelling by means of shaped low reluctance magnetic material conveniently placed at both the primary and secondary coils. Both of these solutions exhibit wireless efficiency 90 % or higher for stationary charging and 83 % or lower for moving vehicle charging with a 20 cm or less air-gap.
The above efficiency optimization techniques have proven very promising. However, the wireless charging market is yet to be developed because of many challenges such as interoperability limitation due to operating frequency selectivity, billing portability, and electromagnetic field emissions concerns. The technical challenges are being resolved through global standardization works such as SAE J2954, IEC 61980-1, ISO/IEC 15118, ICNIRP-2010, IEC 61851 that address transmitter configuration and form factor, receiver location in the vehicle, operating frequency, and communication interface between the vehicle and the grid, non-ionizing radiation protection, as well as communication protocol between off-board charger and vehicle.
While mass commercialization is dependent upon the customer adoption of electrified vehicles and the completion of the above standardization works and the ensuing regulations, various partnerships between research organizations (e.g. KAIST, ORNL), leading wireless power transfer technology providers (e.g. WiTricity), tier-one suppliers such as Delphi along leading automobile manufacturers are paving the way to a new industry. WPT is uniquely positioned for alleviating the concerns regarding the BCR equation through stationary charging in the medium run, and for effectively solving it in the long run through the ultimate adoption of the technology of dynamic vehicle charging.
References
André Kurs et al (2007) Wireless power transfer via strongly coupled magnetic resonances. www.sciencexpress.org/7June2007/Page2/10.1126/science.1143254
Miller JM (2011) Wireless Power Transmission In: ORNL power electronics industry symposium, ORNL conference center, 22 July 2011
Miller JM (2012) Wireless power charging fundamentals and challenges, SAE2012 hybrid vehicle technologies symposium. Town & Country Resort & Conference Center, San Diego, pp 21–22
WiT-3300 Development Kit. http://www.witricity.com/pdfs/WiT-3300_data_sheet.pdf
Delphi Press Release, November 1, 2010. http://green.autoblog.com/2010/11/01/delphi-partners-with-witricity-on-automated-wireless-charging-sy/
OLEV Brochure. http://eews.kaist.ac.kr/test/MHOLEV/D.%20OLEV%20Brochure.pdf
Time magazine (2010) The 50 best inventions of 2010, 22 Nov 2010. http://www.time.com/time/specials/packages/article/0,28804,2029497_2030622_2029703,00.html
Miller JM, Omer Onar (2012) ORNL’s in-motion WPT system. In: conference on electric roads and vehicles, CERV2012, Newpark Resort and Hotel, Park City, 16–17 Feb 2012
Grant A. Covic, Michael L. G. Kissin, Dariusz Kacprazak, Niels Clausen, Hao Hao (2011) A bipolar primary pad topology for EV stationary charging and highway power by inductive coupling. In: IEEE energy conversion congress & exposition, ECCE2011, Hyatt Regency Hotel, Phoenix, 17–22 Sept 2011, pp 1832–1838
Mickel Budhia, Grant A. Covic, John T. Boys, Chang-Yu Huang (2011) Development and evaluation of a single sided flux couplers for contactless electric vehicle charging.In: IEEE energy conversion congress & exposition, ECCE2011, Hyatt Regency Hotel, Phoenix, 17–22 Sept 2011, pp 614–621
Budhia Mickel, Covic Grant A, Boys John T (2011) Design and optimization of circular magnetic structures for lumped inductive power transfer systems. IEEE Trans Power Electron 26(11):3096–3101
Seung-Hwan Lee, Robert D. Lorenz (2011) A design methodology for multi-kW, large airgap, MHz frequency, wireless power transfer systems. In: IEEE 3rd energy conversion congress & exposition ECCE2011, Hyatt-Regency Hotel, Phoenix, 17–20 Sept 2011
Pickelsimer Michael, Tolbert Leon, Ozpineci Burak, Miller JM (2012) Simulation of an electric vehicle class wireless power transfer system as viewed from the power grid. In: IEEE international electric vehicle conference, IEVC2012. CU-ICAR, Greenville, pp 4–8
Takehiro Imura, Hiroyuki Okabe, Yoichi Hori (2009) Basic experimental study on helical antennas of wireless power transfer for electric vehicles by using magnetic resonant couplings. In: IEEE vehicle power and propulsion conference, VPPC2009, Fairlane Conference Center, Dearborn, 7–10 Sept 2009, pp 936–940
Wu HH, Gilchrist A, Sealy K, Israelsen P, Muhs J (2011) A review on Inductive charging of electric vehicles. In: IEEE 2011 international electric machines and drives conference, IEMDC2011, Niagara Falls, NY, 15–18 May 2011, pp 866–871
Miller JM, Clifford P White, Omer C. Onar, Phillip M. Ryan (2012) Grid side regulation of wireless power charging of plug-in electric vehicles. In: IEEE energy conversion congress & exposition, ECCE2012, Raleigh Convention Center, Raleigh, NC, 15–20 Sept 2012 [submitted for publication]
Morris Kesler (2012) Wireless charging of electric vehicles using highly-coupled magnetic resonance. WiTricity Presentation at the Haus der Technik Technical Conference and Vehicle Exhibition, Electric & Electronic Systems in Hybrid and Electric Vehicles and Electrical Energy Management, Miesback near Munich, Germany, 23–24 April 2012
Aristeidis Karalis et al (2008) Efficient wireless non-radiative mid-range energy transfer. Ann Phys 323:34–48
Suh IS (2011) Application of shaped magnetic field in resonance (SMFIR) technology to future urban transportation, CIRP design conference
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Rakouth, H. et al. (2013). EV Charging Through Wireless Power Transfer: Analysis of Efficiency Optimization and Technology Trends. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 192. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33741-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-642-33741-3_14
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33740-6
Online ISBN: 978-3-642-33741-3
eBook Packages: EngineeringEngineering (R0)