
Abstract
The test bench for handling the vibration input and output in a driveline is presented in this contribution. In the experiment, the rear subframe and propeller shafts and axle were composed and mounted with rubber mounts each other as a role of vibration absorbing function. For applying the vibration input instead of the torsional vibration effect of an engine, the shaker moved only the upper and lower side excitation was taken. In particular, the torsional vibration due to fluctuating forced vibration excitation across the joint in between driveline and rear subframe was carefully examined. Accordingly, as the joint response was checked from experiments, the FE-simulation (finite element simulation) using FRF (frequency response function) analysis was performed. All test results were signal processed and validated against numerical simulations. In the present study, a new test bench for measuring the vibration signal and simulating the vehicle chassis system is proposed. The modal value and the mode shape of all components were analyzed using the model to identify the important components affecting driveline noise and vibration. It can be concluded that the simplified test bench could be well established and be used for design guide and development of the vehicle chassis components for the improvement of NVH (noise and vibration harshness) problems.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The major excitation caused to a vehicle system is torque fluctuation by engine excitation. In recent years, the driveline vibration problems are emphasized due to increased engine power and overall increased NVH (noise and vibration harshness) refinement demand from customers. In order to detect driveline vibration issues in an early design stage for the improvement of NVH problems, it is necessary to test and simulate the vibration mode generated by the driveline detached from the vehicle, which is composed of the rear subframe and propeller shafts, axle and rubber mounts used for reducing the primary driveline vibration transmitted to the vehicle body. In a conventional driveline test bench [1, 2], a combustion engine or an electric motor is used for the torque input. However, these equipments are very expensive and the unbalanced force of the engine itself can be the undesirable noise source. In this study, therefore, a shaker was used instead of the engine torsional vibration input because it is possible to make a low cost driveline vibration test bench and to exclude the undesirable noise input source. In addition, a simplified driveline test bench was proposed and evaluated.
The use of computer aided engineering (CAE) techniques, such as the finite element method, as tools for prediction of NVH performance has become almost a standard approach in the automotive industry [1, 2]. The appropriate use of simulation tools can lead to a significant reduction in the number of prototypes required to validate design alternatives and search the root causes of NVH issues detected at prototypes. In order to reach this stage, a thorough correlation study between experiments and simulation must be carried out. In this work, the vibration mode of the driveline was checked from experiments and FE-simulation for FRF (frequency response function) analysis was performed. The test results were compared with the simulation results in order to get more advanced and reliable CAE simulation.
2 Experiments and Simulation Procedure
In order to evaluate the NVH characteristic due to the engine rotation and torque variation, the rear sub-frame, propeller-shafts, rear axle and drive-shaft were composed and mounted with rubbers. Since the propeller-shaft and drive-shaft were rotating parts, the sensor adhesion for measuring the vibration was difficult. For example, a special gap sensor or razor sensing system is needed for the measurement of rotation components. For applying the vibration input instead of the torsional vibration effect of an engine, a shaker was used as shown in Fig. 1. Therefore, the rotational component was excluded and only the upper and lower sides excitation due to the shaker was applied in the present study. In particular, the vibration due to fluctuating forced vibration excitation across the joint between the driveline and the rear sub-frame was carefully examined. A LMS Co. Pimento equipment was used for the vibration measurement and a PCB (printed circuit board) triaxial accelerator was used for detecting the acceleration of the excitation.

Schematic model and measuring points of the driveline of the rear chassis system
For applying the torque fluctuation instead of engine excitation, the shaker was used with increasing frequency from 15 to 145 Hz in one step measurement.
CAE computer simulation was performed by the method of modal frequency response function (FRF Function) using the commercial program Nastran Sol. 111. The simulation model was composed of 110,000 numbers of solid and shell elements. The simulated shaker speed was swept in the same type of experiment input frequency from 15 to 145 Hz using response value at all characteristic points. Simulated results were compared with experimentally measured results. Figure 2 shows the test bench of the driveline of the rear chassis system. All components were composed and mounted by rubbers coupling.

Test bench of the driveline of the rear chassis system
3 Results and Discussion
In order to improve the agreement between the predicted and experimental results, the appropriate dynamic joint stiffness of the rubber components and a prediction method of the each dynamic stiffness, which was reflected at each sweeping frequency, should be well matched. In addition, the initial loads which were applied at each component when assembling each component of the vehicle chassis system should be known. However, the magnitude of the loads was not known and the load values were different in the vehicle chassis system. Figure 3 shows the driveline test bench of the rear chassis system. All components were composed and mounted by rubber coupling.

Model of driveline test bench in rear chassis system
The natural frequency and the mode shape were investigated through the modal test of a simple sub-frame. In the simple component modal test, the sub-frame was pending from an elastic cord with an acceleration sensor and the excitation was applied by an impact hammer and the frequency response was achieved. The component model of the sub-frame as shown in Fig. 4a was treated as a line path and simplified as Fig. 4b in the present study. Figure 5 shows the simplified mode shape and the measured natural frequency of the sub-frame. As shown in Fig. 5, the mode shapes from mode 1 to mode 4 showed a decoupled shape and natural frequency (Hz), respectively.

Example of a simplified rear sub-frame model. a Sub-frame model. b Simplified sub-frame

Modal analysis test results of rear sub-frame. a Mode 1 (59.4 Hz). b Mode 2 (126.2 Hz). c Mode 3 (129.6 Hz). d Mode 4 (202.5 Hz)
The finite element model of the sub-frame was made by using two-dimensional shell elements and the natural frequencies were calculated by the Nastran program (Sol. 103 normal mode analysis). Figure 6 shows the mode shape and modal values of the sub-frame from the FE-simulation. From the comparison between Figs. 4 and 5, the mode shapes and the natural frequencies from experiments were in agreement with those from simulation results. Figure 7a, b show the tested and calculated results of vibration animation of the rear chassis system at 27 Hz acceleration. In addition, Fig. 8a, b show the tested and calculated results of vibration animation of the rear chassis system at 33 Hz acceleration. From these results, when compared with experimental results, the calculated results of the system showed reasonably good qualitative agreement.

FE analysis results of rear sub-frame a Mode 1 (60.1 Hz). b Mode 2 (124.2 Hz). c Mode 3 (131.3 Hz). d Mode 4 (193.1 Hz)

Vibration results of the rear chassis system at 27 Hz a test and b calculation results

Vibration results of the rear chassis system at 33 Hz a test and b calculation results
Figure 9 shows one example of acceleration amplitude (dB) at the shaker point from the experiment. In the case of the shaker, a 130 dB excitation was constantly applied at Z-direction. X-direction had some noise because of equipment limitation.

a X-direction and b Z-direction acceleration amplitude (dB) at the measuring point of shaker
Figure 10 and 11 show the synthesize representation of measured acceleration at X-direction and Z-direction, respectively, using each points measurement of the propeller shaft based on the shaker excitation. It was confirmed that some special frequencies measured during the experiment had a good agreement with the calculation results, contributed by the resonance. It was also suggested that if the component has higher or lower stiffness without affecting its special resonance frequency, it will have improved NVH characteristic.

Rear chassis vibration results (Propeller-shaft) at acceleration (X-direction). a FE calculation results. b Experimental results

Rear chassis vibration results (Propeller-shaft) at acceleration (Z-direction). a CAE calculation results. b Experimental results
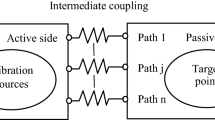
Each vehicle component has natural frequencies which can be exited by an active source creating the resonance phenomena. This means that the excitation amplitudes are magnified at the natural frequency of the component. Therefore, it is essential to control the interaction of the various resonances by tuning (i.e. frequency shifting) these resonances within the driveline system for better overall performance [3–6]. In order to tune the resonances of the driveline system, it could be considered to change the stiffness of the component and modify the design of the rubber insulators.
In order to improve the prediction capability of the NVH evaluations, however, it is necessary to develop a better test method of the joint parts, considering the rubber properties (static and dynamic stiffness) of each component. Figure 1 shows the measuring points and components name in the rear sub-frame chassis system as previously shown.
Figure 12 shows the ODS (operating deflection shape) of the rear axle roll mode at 66 Hz obtained by the NVH test. It was confirmed from ODS animation that the mode shape at 66 Hz was a roll mode due to the resonance of the axle. Therefore, it was suggested that the stiffness of axle should be higher in order to avoid its special resonance and have an improved NVH performance. Even though the calculated vibration result does not agree well with the measured values quantitatively, the simulation results show that the modal value and mode shape due to the special resonance of the chassis components are considerably similar to the experimental results and could be characterized.

Operating deflection shape of the rear axle roll mode at 66 Hz
When compared with experimental results, the calculated FRF analysis of the system showed reasonably good qualitative agreement. Further analysis showed that the modal value and mode shape simulation of each driveline single components was quantitatively in good agreement with the experimental results. However, the simulated results of the driveline system should be compensated by the joint parts. The joint response by rubber insulators was the main cause of the deviation from the test bench results of the driveline system. The reason of this deviation due to the simulated joint response of rubber components can be explained as follows. One thing was caused by the initial (residual) load which occurred from assembling each rubber components for composing and insulating the chassis system. The other was caused by unknown parameters of the dynamic stiffness in the variable conditions of the experiment which was performed with varying frequency from 15 to 145 Hz at one step. Therefore, it was needed to offset this deviation by a special weight value (e.g. dynamic stiffness ratio). In order to improve the correlation between the predicted and experimental results, a further analysis about the prediction method of each dynamic stiffness of rubber joint parts, which was reflected at each sweeping frequency, should be developed. However, the initial load (remaining pre-load) applied to the joint part when assembling each component of the vehicle is very difficult to be predicted.
4 Conclusion
NVH behavior of the propeller-shaft and drive-shaft by torque fluctuation can be appropriately evaluated from a driveline test bench. When compared with experimental results, the calculated FRF analysis of the system showed reasonably qualitative agreement. However, the calculated results of the driveline system have a minor deviation. This deviation could be supposed by 2 reasons from the joint response of rubber components. One thing was caused by the initial (residual) load which occurred from assembling each component for composing the chassis system. The other was caused by unknown parameters of the dynamic stiffness in the variable conditions of the experiment which was performed with sweeping frequency from 15 to 145 Hz in one step. The NVH characteristics of the simple driveline system, which the body and the other parts were excluded from, were evaluated. This evaluation could contribute to the NVH improvement of the vehicle at the early design stage.
References
Steyer, G, Voight, M., Sun, Z.: Balancing competing design imperatives to overall driveline NVH performance objectives. SAE Technical Paper 2005-01-2308 (2005)
Magalhaes, M, Arruda, F., Filho, J.: Driveline structure-borne vibration and noise path analysis of an AWD vehicle using finite elements. SAE Technical Paper 2003-01-3641 (2003)
Exner, W.:NVH Phenomena in light truck drivelines. SAE Technical Paper 952641 (1995)
Kim, K. J., Rhee, M. H., Choi, B.-I, Kim, C. W., Sung, C. W., Han, C.-P., Kang, K. W.: Development of application technique of aluminum sandwich sheets for automotive hood. Int. J. Precision Eng. Manuf. 10(4), 71–75 (2009)
Kim, K.J., Won, S.T.: Effect of structural variables on automotive body bumper impact beam. Int. J. Auto. Tech. 9(6), 713–717 (2008)
Kim, K. J., Sung, C. W., Baik, Y. N., Lee, Y. H., Bae, D. S., Kim, K.-H., Won, S. T.: Hydroforming simulation of high-strength steel cross-members in an automotive rear subframe. Int. J. Prec. Eng. Manuf. 9(3), 55–58 (2008)
Acknowledgments
This research was in part financially supported by a grant from the Center for Advanced Materials Processing (CAMP) of the Twenty-first Century Frontier R&D Program funded by the Ministry of Commerce, Industry and Energy (MOCIE), Republic of Korea. Also, this research was partially supported by the Seoul National University and Science Technology research program.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Kim, K.J. et al. (2013). Design of Driveline Test Bench for Noise and Vibration Harshness Improvement of Automotive Chassis Components System. In: Öchsner, A., da Silva, L., Altenbach, H. (eds) Design and Analysis of Materials and Engineering Structures. Advanced Structured Materials, vol 32. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-32295-2_1
Download citation
DOI: https://doi.org/10.1007/978-3-642-32295-2_1
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-32294-5
Online ISBN: 978-3-642-32295-2
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)