
Abstract
In the last decade, the use of robots in educational contexts has been gaining an increasing interest and expression from teachers and researchers, and various attempts have been made to introduce robotics in education. With the aim of understanding how the use of robots, as mediating artefacts of learning, contributed to the production of meaning and learning of mathematics and informatics, we created a research project DROIDE II – Robots in Mathematics and Informatics Education. In this chapter, we will describe and analyse two of the six learning scenarios, created and implemented by the DROIDE II project, for hands-on mathematics with robots – ‘Making a Movie’ and ‘Robot Race’. The first one was implemented with two primary school classes working together to write a story and to make a movie in which robots were the characters. Along this process, they learned several mathematical concepts, methods and problem-solving strategies. The second was about learning statistics at middle school through a robot race. Both learning scenarios adopted project work as a methodology. The practice that emerged from the learning scenarios’ implementation led to problem-solving where students negotiated several mathematical meanings and robots structured the way students acted, thought and learned. We will also highlight some features of the design of the learning scenarios that potentiated the learning of mathematics in a technological environment.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Robots
- Problem-Solving
- Mathematics learning
- Learning scenarios
- Participation
- Transformation
- Dialogic action
1 Introduction
Children are growing up in a world where technology surrounds them and encompasses most of the aspects of their lives. This has an impact on a new generation of learners who are entering our educational institutions having technology as an integral part of their everyday life. Those learners are imbued with particular forms of talk, cultural history and social relations. All this transforms the way they learn. Thus, creating technological learning environments in the classroom seems to be important and needed. But it challenges the traditional process of teaching and learning.
We have therefore decided to challenge the teaching and learning of mathematics and informatics within the project DROIDE II – Robots in Mathematics and Informatics Education – that aimed to understand how the use of robots as mediating artefacts of learning contributes to meaning production and to the learning of mathematics and informatics topics and contents, by exploring possible articulations between both domains. This research problem, herein defined in general manner, was dissected into two research questions aimed at guiding our research work. (1) How do students learn mathematics and/or informatics, when robots are mediators of learning? (a) What is the shared repertoire that students build in those practices and what are its particular features? (b) Which kinds of contradictions arise from the use of robots on those learning environments? (c) How do such contradictions lead to new forms of activity? (d) How can the work with robots contribute to the development of mathematics and informatics competences? (2) What contributions to the learning of mathematics and/or informatics emerge from the participation in social digital environments? (a) How do young people make explicit and communicate their ways of doing and thinking on those environments? (b) How do young people critically but constructively participate on those environments? (c) How are young people aware of their own responsibility and initiative that their participation entails?
DROIDE II has adopted a strategy that brings the theoretical field and the empirical field of research into dialogue, in the course of four phases: (1) creating problems in mathematics and informatics education to be solved with robots, (2) creating learning scenarios using robots in which the created problems will be included, (3) analysing the practice of the learners when solving problems using robots and (4) developing a set of guidelines about using robots as an educational tool.
We assumed that robots would be used to discuss mathematical concepts and to solve mathematical problems, but also that students using robots would be dealing and generate mathematical concepts and problems. We conceptualise learning as a social phenomenon, and our theoretical background is based on three approaches to learning: learning as participation (Lave & Wenger, 1991), learning as transformation (Engeström, 2001) and learning as dialogic action (Alrø & Skovsmose, 2004).
Due to the nature of our research problem, the phenomenon under study – learning – and our positioning towards learning, we designed a qualitative research by adopting an interpretive approach (Savenye & Robinson, 2004).
Data collection for analyses and evidence production was performed through (a) the researchers’ participation in learning environments, in which robots had a fundamental role (namely, school contexts – mathematics classroom, in grades 1–9, and informatics, in grades 10–12; project area (a cross-disciplinary area taking place in middle school) – and other non-curricular and virtual learning environments), and (b) informal interviews to the participants. Field work was planned to be across a 6-month period and took place through the immersion of subgroups of researchers in the field. Work sessions as well as the participants’ interviews were audio and/or video recorded.
In this chapter, we intend to explore and discuss the role of robots as mediating artefacts of mathematics learning and its effect on the reconstruction of the students’ foregrounds regarding the learning of mathematics. We will explore the role of robots in the learning of mathematics at a micro-level of analysis, by bringing students’ perspectives forward, and also at a macro-level of analysis, by bringing sociocultural and political aspects that frame students’ lives and can sometimes hinder mathematics learning, using insights coming from the empirical field in two of the learning scenarios of the project DROIDE II: ‘Making a Movie’ and ‘Robot Race’.
As the design and implementation of learning scenarios had a fundamental role in this project, in the following section we will discuss the concept of learning scenarios and arguments for their use. Afterwards we will briefly present the six learning scenarios designed in the project DROIDE II. Two of them will be further and deeper described as they will be used later in the chapter as a support to discuss learning with robots.
2 Learning Scenarios
Learning scenarios constitute resources that people use to modify or transform their previous ideas about something (Matos, 2013). These are not projections or plans for future actions, but they contain structural elements that shape people’s learning trajectories.
Our positioning about learning led us to the concept of learning scenarios because this resource proved to be a good way of addressing and articulating several components of learning situations, by imagining different settings constituted by different actors.
2.1 What Are Learning Scenarios and Why to Use It?
During times of rapid change or complexity, existing ways of thinking are often based on rationales that are no longer valid and that prevent us from seeing new relationships. Scenarios are useful tools when complexity and uncertainty are high. Complexity and uncertainty are typical of many situations and, for that reason, anticipating changes through creative processes, such as formulating scenarios, becomes helpful.
The concept of learning scenario is a prospective concept used when we intend to introduce changes in a certain context (Carroll, 1999). A learning scenario tells a story of how various elements might interact under certain conditions:
Scenarios are stories of what might be. Unlike projections, scenarios do not necessarily portray what we expect the future to actually look like. Instead scenarios aim to stimulate creative ways of thinking that help people break out of established ways of looking at situations and planning their action. (Wollenberg, Edmunds, & Buck, 2000, p. 2).
Learning scenarios are stories of persons in activity and because people are in action, they learn. The fundamental is in the action and interaction between people and not in the resources used. A learning scenario is a hypothetical situation of teaching and learning composed of a set of essential elements: a setting in which learning occurs (in which people are included); the knowledge domain in which the scenario may be situated (including multi- and transdisciplinary domains); the roles played by different agents, shaped by their goals; the story establishing the conditions for the development of the scenario, including sequences of events and creating a coordinated structure that constitute an activity. The learning scenario should also predict an outcome and/or products.
Learning scenarios should not be something that teachers design for the students. They are joint constructions of the different actors involved – such as teachers, students, researchers, etc. They should be configured in a dynamic process of creation, experimentation and reflection and conceived as something ‘under construction’ since they should be modified while they are being implemented, according to the teachers’ and students’ reflections and their evaluation of the work being done, in trying to meet the needs of the different actors involved.
In project DROIDE II , learning scenarios were a powerful way of enabling researchers, teachers and students to jointly engage in creative learning contexts. According to our positioning towards learning – as a social phenomenon – learning scenarios were used as a tool for engaging different sets of actors, understanding their motives and preferences, encouraging the use of different kinds of tools and determining equitable arrangements among actors where abilities, preferences and power relations differ. Our experience and also our learning through the project development led us to gradually design learning scenarios that were less and less structured and also with increasing complexity and involving more interdisciplinarity.
2.2 Scenarios Designed and Implemented in the Project DROIDE II
A possible trip
This was the first learning scenario we created and possibly the one with the most tight and straightforward academic structure. We created a worksheet about the ‘notion of function’, which aimed for students in seventh grade to understand, learn and define the concept of function, by working with robots as they followed the questions of the worksheet. The innovation was just the inclusion of the robots for students to think about the mathematical concepts involved.
The worksheet proposed that students think about two robot trips represented by two graphics provided. First, we intended that the students analyse both graphics and make a description of the robot trip having the starting point as a reference. After, we intended that students would programme the robot to perform the trips, if possible. One of the graphics represented a relation between time and distance that was a function and the other represented a relation that was not a function.
Students also solved a worksheet about proportionality as a function. Through the comparison of the velocities of two robots, they redefined their notion of proportionality.
Introducing robots in the school mathematics class exposed a dynamic link between the work with those artefacts and the way students thought about the notion of function (Fernandes, 2012).
Making a movie
We designed a learning scenario involving two primary school classes working together with robots. The learning scenario was developed in two moments. In a first moment, students built robots and defined their physical and emotional features. Their creations become characters in a play-story written by all of them. After writing the story, students programmed their robots in order to perform their roles in the play; in a second moment, students, teachers and researchers decided to produce a film, using the story written as a storyline. Students established new tasks to produce the film, and they created teams to accomplish those tasks. Each student chose which team(s) they wanted to work in (Martins, 2013a).
The use of robots in this learning scenario contributed to the emergence of mathematical and other concepts. Robots were a powerful tool for students to perceive, use, expand on and talk about mathematical concepts. Despite the contributions that robots brought to this learning scenario, we cannot disregard the working methodology encouraged. Our positioning towards learning – as participation in social practices – led to a methodology with characteristics that potentiate the learning scenario (Martins & Fernandes, 2015).
Robot race
To work with NXT robots, students from an eighth-grade class received assembling kits and had the opportunity to build, in groups, a car out of Lego bricks, by following instructions. Each working group also created a prototype of a racing route. In the whole-class group, the students chose the racing route to be used and then built it in real size. Afterwards, the robot races were held. Each working group collected data and worked on them in order to decide how to elect the winning robot. With the data collected from the races, each group made a statistical study where conclusions were provided and generalisations were established. The statistical content matter had not been studied before the implementation of this learning scenario; rather, those emerged from the robot race development (Lopes, 2012). Having provided a relevant context – Robot Race – was important to promote knowledge and awareness, among students, about the relevance of statistical data. With this project, students have become more able to solve problems and to understand, to interpret, to analyse, to relate, to compare and to summarise data, thus developing statistical competence and citizenship attitudes (Lopes & Fernandes, 2015).
Virtual droide
Three groups comprised of three or four students (each one from a different part of Portugal – Lisbon, Porto and Funchal) that did not know each other before the scenario implementation built a robot (collaboratively) that could solve eight problems proposed by the research team. Each group had a tutor (an informatics teacher) working with them on weekly meetings. Each student had a robot, but we imposed the condition that they had to build a robot that could solve all the problems. This condition was central for youngsters to work collaboratively (Santos, 2012).
Robot guide dog for the blind girl
Ema was a blind girl. The informatics teacher proposed, to their pupils of grade 12, in a cross-disciplinary area called project area, to build a robot guide dog for the blind girl. Pupils were organised in working groups. Jointly, they defined four important tasks in order to make the project: (1) to search for the features of a guide dog in order to define robots’ functions, (2) to decide how the robot has to be in order to execute predefined functions, (3) to programme the robot and (4) to create an arena in which they can test the robot (Abrantes & Matos, 2012).
A journey to the centre of the Earth
The activities were developed with students of ninth grade working in groups of four or five elements. During the classes, there were moments of discussion in large and small groups, and in order to assess the goals’ achievement, we monitored discussions in the working groups as well as those that occurred between students of different groups.
First, students watched the movie trailer The Core in which they were challenged to ‘save the planet Earth’. The challenge appears written as subtitle. Then they built a ship prototype, to reach the centre of the Earth in order to detonate a bomb of great intensity in the core to reactivate it. Several bombs with less intensity should be dropped close to the paths that were open during the journey. Initially the working groups had to build the ship prototype (Phase 1) and then test the programming (Phase 2) to become familiar with the programming environment. During the classes, different groups were working on different phases of scenario’s implementation, according to their own rhythms.
The teachers helped the students when they were testing the prototype programming by setting small challenges. Using a small two-dimensional scheme of the centre of the Earth, students projected a round journey to the Earth’s core. At the end, students prepared a written report requested by ‘NASA’. With this report, we intended that students could achieve the meaning of trigonometric ratios as relationships between the lengths of the sides in similar right triangles (Fernandes, 2013c).
3 Our Positioning Towards Learning
For thousands of years, children have learned the lessons of their community by participating with parents and others in important activities to their lives and the lives of their families. Learning occurred while the children were trying to be part of the ongoing activities of their families – be they agriculture, weaving, fishing, trade, understanding of spiritual narratives, treatment of diseases or discussion of moral principles (Rogoff, Turkanis, & Bartlett, 2001). The children were in the same scenario that adults were and realised the importance of learning the skills needed for survival. From this point of view, learning is conceived as part of identity construction. It is connected and embedded with the social and cultural setting in which it occurs. Slowly and steadily the idea of school and the schools themselves as institutions appeared. Today, for many, it is impossible to imagine that children can learn without being taught (in the traditional sense) and also to imagine instruction that is organised in other ways than what is common in schools (Fernandes, 2004).
Associated with this idea, learning is seen as a process in which the individual moves from one phase of not understanding to one stage of understanding a topic or subject; and it is also assumed that everybody learns in the same way. This conception of learning determines a style and an educational process. ‘A number of authors have challenged that view and proposed new forms of understanding how people learn. In particular, authors from a situated learning perspective claim that learning is intimately linked with participation in social practices’ (Matos, 2010, p. 42).
Whatever the social theory we adopted to think about learning, it has always an underlying way of looking at the person, the social world and the relationship between the person and the world. In project DROIDE II, (i) the person is seen as the agent in the world; (ii) we assume the relation between the agent and the world as a dialectic one (Fernandes & Santos, 2013):
People, even when looked at in their individuality, are considered in relation to the social practices in which they act. As participants in social practices, they participate in the social and institutional world, which is inherently collective. Subjects, practices, and the social world (in which culture and knowledge are embedded, but also artifacts, meanings, and rules) are perceived as constituting one another and are therefore codependent. (p. 2).
The way learning is conceptualised in the context of this project connects to three metaphors that complement each other – participation, transformation and dialogic action – as discussed in the project LEARN (Matos, 2010).
First, we take learning as participation , recognising it as an integrative part of generative social practices and considering it ‘located in the social co-participation processes and not in the head/mind of the people’ (Santos, 2004, p. 43). Knowledge, identities and communities are constructed and reified in social practices being that people, who are participating in them, learn. But because, in social practices, there are people in transformation (learning), then collectives, communities (of practice) and organisations transform themselves, or ‘learn’ (Fernandes & Santos, 2013).
Furthermore, we take learning as transformation , which is inherently linked to the idea of activity, and therefore we may speak of ‘learning activity’. But we can only understand the meaning and significance that learning activity takes when we consider it as framed by a system (the activity system) that represents the relationships established between the subjects and the social world (Engeström, 2001).
Finally, we envision learning as dialogic action , which implies participating in dialogues with a purpose that usually stems from motives that lead people to participate in a certain practice, even if the practices in which people participate have not been organised so as to meet those motives. However, the ways in which people participate in social practices hold a strong relationship with the motives and dispositions (those being the resources of the intentions-in-learning (Alrø & Skovsmose, 2004)). Learning involves being in a dialectic process that demands, from the learner, intentionality, reflection and critique, that is, acting dialogically with the world (artefacts, meanings, etc.) and with others.
4 Artefacts of Mediation on the Learning of Mathematics
Every theory of learning that assumes the situated nature of learning embodies the notion of participation. Participating does not only refer to events of local engagement in certain forms of activities or with certain types of people but to a wider process of being an active participant on the practices of social communities (Wenger, 1998). Participation makes us not only what we are but also who we are and the way we look and interpret what we do. It also shapes the communities in which we participate; in fact, our ability or lack of it to shape our communities of practice is an important aspect of our participating experience.
Participation in a social practice implies constant negotiation. To negotiate a shared enterprise entails responsibility from the parts involved. These relations include what matters and what does not, what is important and what is not, what to do and what not to do, what parts need attention and what to ignore, what to say and what not to say, what should be justified and what to presume justified and what to show and what to conceal. It also include to understand when actions and artefacts are good enough and when they still need improvement or refining (Wenger, 1998), given that ‘their usefulness is not revealed in the characteristic identified independently of the use in the practices where they are put in action’. (Santos & Matos, 2008, p. 201).
Understanding learning, especially mathematics learning, involves understanding how the use of artefacts in mathematics classes ‘impacts on the learners’ conceptions of mathematical objects encountered through the use of such artefacts’ (Jones, 2000, p. 1). Learning mathematics is a process of people becoming more capable of participating, and it is also a social practice which encompasses the relations between people, knowing and artefacts. Boaler and Greeno (2000) consider knowing and understanding mathematics as aspects resulting from participation on social practices, in particular, those in which the individuals engage themselves on sense-making and solving problems using mathematics representations, concepts and methods as resources. Throughout this process, multiple moments of negotiation take place. Those moments of negotiation that take place in mathematics classes shape the practice of school mathematics, affecting participants and their way of participating.
To talk about participation also requires talking about reification. Wenger (1998) uses the term reification more generally to talk about the process of shaping our experience by producing objects that congeal this experience into ‘thingness’. In doing that, we create focus points around which the negotiation of meaning becomes organised. According to Matos (2010, p. 48):
[t]he key issue is that negotiation of meaning occurs in the convergence of the two: reification calls for transformation of experience, for its commodification; reification produces projections of meaning in the social world giving them a dimension of existence frequently perceived as independent.
Writing down a law or producing a tool is a similar process. A certain understanding is given a form. ‘This form then becomes a focus for the negotiation of meaning, as people use the law to argue a point, use the procedure to know what to do, or use the tool to perform an action’ (Wenger, 1998, p. 59). The reification process is central in any practice. In every practice, there are ‘abstractions, tools, symbols, stories, terms and concepts that reify something of this practice in a congealed form’ (Wenger, 1998, p. 59). What usually happens in mathematics classes is that the concepts and procedures are presented to students in a way that reification it is not tangible for them. They do not participate in the process of giving meaning and significance to those concepts and procedures.
With the term reification, Wenger (1998) intends to cover a wide variety of processes that include making, designing, representing, naming, encoding and describing, as well as perceiving, interpreting, using, reusing, decoding and recasting. Reification shapes our experience. Having a tool to perform an activity changes the nature of the activity. The word processor reifies our view of the activity of writing but also changes the way we position ourselves in relation to writing, in the sense that we pay attention to different aspects of those we pay attention when we write by hand. Incorporating the word processor as a mediational instrument in the activity of writing had the power to change the activity. Furthermore, the artefact of mediation is also transformed during the activity and carries in it a particular culture, that is, the traces of a historical activity. This transformation does not have to be physical; it may be conceptual too, which is a consequence of the way the subject acts with the artefact (Martins, 2016).
4.1 Making a Movie
For the purpose of illustrating and discussing the role of robots as mediating artefacts in learning as participation, we will bring the learning scenario – ‘Making a Movie’, from Martins (2013b).
This learning scenario was developed with two primary school classes – grade 2 and grade 3 – from the same school. Students from both classes worked together throughout all the learning scenario implementation.
At the beginning, the research team presented to both teachers a draft of the learning scenario to be implemented. That initial draft was discussed and modified several times according to ideas presented by the teachers and students. In this process, students have made options, which were very important for them and for the success of the project. The learning scenario was constructed by the research team, by the teachers from both classes and by their students. Parents have been informed about the project and driven by the enthusiasm of their children, which in turn, fomented enthusiasm in the parents. Between some of the working sessions, the teachers have often contacted the researchers to report on students’ opinions and expectations.
In this learning scenario, students, teachers and researchers had a main purpose – Making a Movie with robots – and to achieve it, many actions were developed. In those actions all the participants chose what was important to do, what physical and conceptual artefacts were to be used and also the way each one of the actors could actively participate in a meaningful and effective way. The decisions and strategies were jointly discussed.
This learning scenario was implemented in a less conventional setting, and we tried to make a bridge between the work on the project with robots and the work that teachers and students had developed in regular classes. The learning scenario was developed in two time frames: the first, between May and June 2011 (students in grade 2 and grade 3), and the second, between April and July 2012 (students in grade 3 and grade 4). The scenario’s activities followed a project work methodology. In this project, students worked with the Lego robots RCX and NXT. In both RCX and NXT models, the programming environment is a very intuitive icon-based drag-and-drop programming language, designed for an easy introduction to programming. By choosing programme blocks that work with the motors and make the sensors react to inputs, students simply build up their programme, block by block, and they could create programmes that range from simple to complex. The students and the teachers had never worked with robots before.
In the beginning of the project, students played a game to choose the working teams. Those teams were composed of students from both classes. At different stages of the scenario’s implementation, those teams have changed because students were involved in different actions, and they chose what they wanted to do and with whom they wanted to work. The teachers had to support students in their work, and the researchers sought to support students and teachers alike in taking advantage of situations that could contribute to the emergence of mathematical concepts. Based on that intention, researchers assumed a questioning attitude towards students’ work in their practice with robots.
In the first phase of the scenario’s implementation, students had to construct different robots (e.g. a dog, a spider, a bug, a football player) and define their physical and emotional features (e.g. whether the robot was strong or weak, whether it was sad or happy). Their creations would become characters in a play-story written by all of them. After writing the story, the students had to programme their robots so that they performed their roles in the play. The initial goal was to accomplish those tasks and make the robot characters for the play. The play was not produced in this first phase of the scenario’s implementation.
In the second phase of the scenario’s implementation, students, teachers and researchers decided to produce a film using the story written as its storyline. Students established new tasks to produce the film, and they created teams to accomplish those tasks. Each student chose in which team(s) she/he wanted to work.
Two teams were created to programme the robots, one team for each of the robot models. The voices team was constituted by ten students who gave voices to the ten constructed robots. This team recorded the voices using the Microsoft Audio Recorder and chose the film’s soundtrack. The film was edited using the Windows Live Movie Maker by the editing team. Some students were responsible for the filming, and others were in charge of the lights. Based on the story previously written, the direction team wrote the script for the film, and this team was also responsible for making the communication between all the involved teams.
According to the created storyboard, students from both classes decided to build the physical ‘scenarios’ needed for filming the movie within the arts classes.
All students decided that the grade 3 class would construct the ‘floor’ in which filming would be made and the grade 4 class would be responsible for the ‘vertical’ scenarios. In order to accomplish those tasks, students explained to the arts teachers from both classes the way the robots would perform the scenes in the film, the way they would move on the filming scenario and which environments would be necessary to create (a restaurant, a park, a castle, etc.). A researcher followed and participated in the arts classes.
In the second moment of the scenario’s implementation, when students were filming, they wanted to paint routes to define the robots’ trajectories. This intention emerged when grade 3 students were working in the arts classes, creating the ‘floor’ for the filming.
As it was found to be interesting that, in different moments of the filming, the streets’ position could change, the researcher suggested the use of black cardboard strips representing the streets in which the robots would move. Thus, the streets’ position could easily be changed, which obtained the agreement of the students and arts teachers.
The researcher prepared the black cardboard strips, and by observing how students positioned the strips on the floor, she considered that this should be a good moment to bring the relative position of lines into discussion. Hence, it opened the space, in this learning scenario, to the negotiation of the mathematical meanings related to this topic. The researcher knew that the grade 3 students had not yet studied the relative position of straight lines in their regular classes and that grade 4 students had already studied it. Supported by our theoretical framework, we believed that using the cardboard strips to discuss robots’ trajectories would be fruitful to grade 3 students for negotiating the mathematical meaning of the straight lines’ positions and to grade 4 students to renegotiate it in this specific practice. This turned out to be another good opportunity to reinforce the bridge between what students were learning in their regular classes and the learning that was occurring with the scenario’s implementation.
4.2 Robots as Mediating Artefacts of the Concepts of Relative Position of Two Lines
We will next analyse how the mathematical meanings were negotiated (Wenger, 1998) in the practice developed within the learning scenario’s implementation and how the robot, as a mediating artefact of learning (Engeström, 1987, 1999a, 2001; Vygotsky, 1978), shaped the way students appropriated those concepts.
The transcription below will support the discussion on the role of the robot on the negotiation of mathematical meaning.
Res: The way that you want to put the streets on the ‘floor’ seems to be related to what you want the robots to do. Let’s imagine, for instance, that I have two robots in distinct streets and that I do not want them to meet each other… How would you place the streets, in this case?
Ine_3: We could place it like this. [The student placed the black cardboard strips on the floor, representing two parallel lines]
Res: Very well. Do you think that our situation is solved?
Mat_3: The robots, moving like that, in those streets, they will never find each other…
Fran_4: Yes, in oblique streets those robots will never find each other…
Res: In oblique streets? What do you mean by that?
Fran_4: Oblique streets are streets that never met [Putting his arms in parallel position].
Mar_4: Those streets are parallel.
Fran_4: I’m confused again. I did it correctly a few days ago, and I’m already confused again...
Mar_4: The oblique streets are others.
Res: And how are they?
Fran_4: Oblique are two lines that intersect, and all angles between the lines are 90°.
Res: Do the angles measure 90°? [Students started whispering without ideas to offer.] Yes or no? [Students continued whispering]
Fran_4: I’m confused all over again.
Grade 3 Teacher: My students haven’t learnt the angles yet… [Talking to the researcher]
Res: But without talking about the angles, we can simply use a cardboard square to support our discussion. [The researcher uses a cardboard square and asks the students.] What can we say about these sides of the square? [Pointing at two parallel sides]
Several Students: Parallel.
Res: And the other two? [Pointing to perpendicular sides of the square]
Bea_3: These are not parallel. If the robots were there, they will surely find each other.
Jes_3: But the robots could both be moving on the streets in the perpendicular position, and they might miss each other. Possibly, one was moving faster than the other.
[The deliberation continued, and students concluded that perpendicular lines are oblique lines that have ‘perfect corners’ in their intersection.]
In analysing the previous discussion, we can see that there was a strong connection between the way the streets (representing lines) were placed on the floor and the way the students claimed that robots would be programmed to travel across them. The meaning of parallel lines was an outcome negotiated from the fact that students did not want certain robots to meet each other. Students concluded that the best way to ensure that two robots would not find each other was to put them moving in parallel streets. The robot, although only conceptually present (through the streets), was the mediator in the negotiation of this meaning.
As we can see in the transcription above, the discussion about the lines’ position (parallel, oblique and perpendicular) was supported by the use of robots. By analysing its trajectories, grade 3 students expanded their knowledge about positions of lines and started using a mathematical vocabulary that was subsequently shared by all students that were working on the project. On the other hand, students from grade 4 needed to make those contents clear to others, which allowed that such specific topics also became apparent to themselves (Martins & Fernandes, 2015).
Students also realised that it would be possible for two robots moving in two intersecting streets (lines) not meeting each other. This question was raised by ‘Jes’: ‘But the robots could both be moving on the streets in the perpendicular position and they might miss each other. Possibly, one was moving faster than the other’. Jes’ finding is probably not completely disconnected from his actions taken in the robots’ programming team. The knowledge that ‘Jes’ had about the effect of the robots’ programming in its movement was brought by him to support his argument. In robots’ programming, students used blocks to define robots’ actions such as moving forwards or backwards for a specific period of time, in seconds. They also established the power of the robots’ motors to produce those movements. By doing that, they were programming robots to move themselves in different velocities. The students of the programming teams were responsible for programming all the robots. Those students therefore knew how robots could move and interact with each other.
Despite the fact that the focus of this article is not on the robots’ programming, we must highlight that the students’ actions in that domain was a very productive field for the negotiation of the meaning of mathematical concepts such as positioning, orientation, duration, trajectories, direction and movement. Dealing with robots was a powerful opportunity for students to engage in solving mathematical problems in a very specific context. By programming robots, students learn to predict how a robot would move from one place to another by establishing time and directions for that action. By manipulating robots, students had several experiences that gradually allowed them to negotiate the meaning of time and space. Robots transformed the students’ conceptions about those mathematical contents. Robots were physically present, and they were a tool for students to perceive and to expand on those concepts. But, as stated above, robots were a structural resource for students’ learning even when they were not physically present. The robot has transformed the way students acted, reasoned and communicated using mathematical contents.
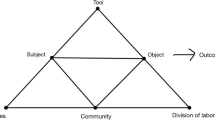
Based on the proposal by Engeström (1999b), the mediating nature of mathematics learning in this activity can be presented in a triangular form (Fig. 6.1).

Robot as mediating artefact on the learning of mathematics
The robot, while being a mediating artefact, is much more than something being used between the student and the mathematical content (the position of lines and/or temporal and spatial notions). In fact, as the episode emphasises, in that interaction the mathematical contents appear, in a unique and concrete way, in the actions developed by the students with those artefacts. In this sense, the data led us to claim that when students used robots in this learning scenario to think about mathematical contents and properties, their activity was mediated in a particular way by those artefacts (Wertsch, 1991). The artefacts reflect joint stories of learning and the member’s engagement in the practice (Wenger, 1998). In this learning scenario, robots represent reifying elements that reflect, in a particular way, the students, the teachers and the researcher’s sense of belonging (Martins & Fernandes, 2012) and their unique stories of participation in that practice.
The robot was also a mediating artefact between the several activities in the students’ school practice. That being said, many concepts (mathematical or others) developed in the classroom activity of all the classes (language, mathematics, natural sciences, technology, arts, etc.) were brought to the project activity ‘Making a Movie’. Similarly, concepts and ideas from the project were taken to the classroom. This was not completely disconnected from the teachers’ and researcher’s intentionality, but it also happened because of the students’ high engagement with the practice that became integrated in the project.
5 Students’ Foregrounds Regarding the Learning of Mathematics
In the previous section, we have drawn on two social theories of learning to analyse the researched phenomena, by adopting the perspective of the learners at a micro-level, which emerged from their participation in a practice, and by assuming the perspective of the school community at a macro-level of analysis. But learning can also be addressed by relating the social, cultural, economic and political aspects that frame students’ lives, at another macro-level of analysis, with the perspective of the students about learning, at a micro-level of analysis.
We thus bring into play the concept of foreground (Alrø & Skovsmose, 2004; Skovsmose, 1994, 2011, 2012) in order to analyse the way students approach learning. According to Skovsmose (1994), every person has a background and a foreground. Background can be interpreted as ‘that socially constructed network of relationships and meanings which belong to the history of the person’ (Skovsmose, 1994, p. 179).
Usually when we talk about the intentions of a person, we relate them with the person’s background, but this is not the only source of intentions. The person’s foreground is also an important source. The foreground is seen as ‘the opportunities which the social, political, economic and cultural situation provides for the person’ (Skovsmose, 2011, p. 22). However, two people having similar foregrounds can act out their possibilities in quite different forms. Thus, the foreground includes both collective and individual features. ‘Foregrounds include experiences and interpretations, which are elaborated through interaction and communication’ (Skovsmose, 2011, p. 23).
One can see the foreground of a person as a complex combination of two sets of features. On one hand, ‘a foreground is formed through the possibilities, tendencies, propensities, obstructions, barriers, hindrances, et cetera, which his or her context provides for a person’ (Skovsmose, 2012, p. 2). One can therefore see the foreground as structured through social, economic, political and cultural parameters; however, the foreground is not uniformly determined by this. The foreground is also formed through the person’s experiences and interpretations of the above mentioned parameters.
The notion of intentionality is related to the notion of foreground. If we look for the motives for an action, it is important to consider the person’s foreground (Skovsmose, 2011). Learning is an action which includes intentions and motives. When we want to investigate learning phenomena, we have to consider the intentionality of the learners.
Can the learning that happens at school be considered in terms of action? This draws our attention to the students’ intentionality, to their foregrounds and to their motives (or lack of it) for learning (Skovsmose, 2011, p. 26):
When learning is seen as action we can interpret different learning phenomena – students’ engagement (or lack thereof) and their achievements (or lack thereof) with reference to their foregrounds. In particular, a ruined foreground can obstruct bringing intentions into the learning process.
For there have to be action and therefore learning, it is important that students experience open and challenging learning situations so that their intentionality to learn ‘is born’ in a natural way. Closed situations can completely block the emergence of intentionality and end up with no need of action. Situations that can bring out intentionality to learn may not be related to the students’ backgrounds. They may be connected ‘with student’s possibilities in future life, not the objective possibilities but the possibilities as the student perceives them’ (Skovsmose, 1994, p. 182).
According to Skovsmose (2011), this aspect is very important given that the meaning of an action is related to the intentionality included in that action, which in turn relates to the foreground of the person in action. The meaning of a classroom activity is constructed by the students, and that construction depends on what students can perceive as their possibilities, and it is related with their foreground and intentions. In view of that, there is a close relationship between meaning, intentionality and foreground.
To learn implies to live meaningful experiences, which can be either relationships between what is taking place in the classroom and the students’ backgrounds or their daily life experiences. However, ‘experience of meaningfulness has much to do with experienced relationship between activities in the classroom and students’ foregrounds’ (Skovsmose, 2011, p. 93). The student produces meaning in a learning situation when he or she feels like he or she is learning something that is socially valued. Students also produce meaning if they understand that their contributions are valued within a situation of cooperation (with colleagues or with the teacher).
The dialogic action is a search for and a questioning on shared perspectives in an attempt to produce meaning. Dialogic action means acting in cooperation.
Learning implies action, which can be a dialogic action in terms of producing means to read the world and also to transform it. But to learn implies also reflection about that action. Dialogic action is an interaction which provides (a visible) basis for critical learning (Alrø & Skovsmose, 2004).
Alrø and Skovsmose (2004) conceptualise critical mathematics learning as being grounded in dialogic actions, and they define mathemacy as the competence that critical mathematical learning represents. That is, mathemacy is not only the ability to calculate and to use mathematical techniques but a competence associated with reflecting and acting in a world strongly structured by mathematical models. Skovsmose (2011) points to mathemacy as the competence of dealing with mathematical notions, applying these concepts in different contexts and reflecting on those applications. Frankestein (1998) advocates the need of mathematics to be worked, lived, taught and learned in the real context and dealing with problems as they are presented to us on a daily basis. In real life, we have to deal with many problems presented to us in an unorganised way. The problem-solving of traditional curriculum isolates and simplifies particular aspects of reality in order to provide students the training of techniques.
5.1 Robot Race
For the purpose of illustrating and discussing the role of students’ foregrounds on the learning of mathematics, we will bring the learning scenario – ‘Robot Race ’ from Lopes (2013).
One year prior to the scenarios’ implementation (school year 2010–2011), the students worked with robots in the learning scenario ‘a possible trip’ that we described above (Fernandes, 2012). In the following school year (in grade 8), they asked the mathematics teacher to work with robots again. The mathematics teacher contacted the research team, and together they designed a learning scenario. We proposed students to organise a robot race. With this learning scenario, students had their first experience with NXT robots along with its programming environment. During nine classes of 90 minutes each, in the last term of the school year, these students learned mathematics using robots.
With the purpose of students learning to programme the robots to hold the races, three challenges were launched: (i) to programme the robot to run around four tables arranged in pairs (forming a rectangle); (ii) to hold races in a straight line from side to side of the classroom (the robot should stop when it detects a wall (ultrasonic sensor)); and (iii) to programme, taking that into account, the robot so that it would have to start the race upon the starting signal (sound sensor), to follow a black line (light sensor) and to stop 15 cm before the end of the line (ultrasonic sensor). Each working group created a prototype of a race route with provided parts, so that two robots could race simultaneously. Each two robots should have the same chance to win. The race route should fit inside the classroom.
In the whole-class group, students selected the race route to be used, and then they built it with the real dimensions. They decided that all robots would run under the same conditions, that is, each one would run twice against each opponent and once in each line of the race route.
They started making some training in the race route in order to improve their programming and thus to increase the chance of winning the races. Each working group collected data from the races performed and analysed it in order to determine the winning robot. Each group made a statistical study – within the scope of an inquiry process – whereby conclusions were provided and generalisations were established. Statistical contents emerged from students’ actions within that activity (Lopes & Fernandes, 2012).
5.2 Racing to Reconstruct Foregrounds Regarding Mathematics
These students were from a poor neighbourhood close to their school. They had a poor school performance, and many of them had low grades in mathematics. Their parents without any constraints accepted this fact. The cultural roots of these students, as well as the way they and their parents interpreted their past experiences regarding school mathematics, led them to have a low participation and a highly disinterested positioning in mathematics classes, including a high rate of absenteeism (Lopes, 2016). We can say that most of these students had a ruined foreground in relation to school mathematics, that is, most of them had only experienced desolated possibilities in relation to the learning of mathematics. The students’ foregrounds did not allow them to see what possibilities school (and particularly mathematics) could bring to their lives since, from the perception that they have about their possibilities of future life, they considered that having good grades in mathematics was not necessary to finish school. Thus, the intentionality to learn mathematics was not easily activated by most of these students. Ten of the fourteen students received bad grades in maths in the second term of the school year 2011–2012, and some of them had never had a good grade in mathematics tests.
So, what changed from the implementation of the learning scenario – ‘Robot Race’?
The fact that students’ request to work again with robots has been accepted by their mathematics teacher seems to have been the starting point for the reconstruction of the students’ foregrounds related to mathematics. Realising that their interests were valued by the teacher opened a space for the emergence of students’ intentions-in-learning.
From the moment the ‘big idea’ of the learning scenario was presented – to hold races with robots – the way students acted has started changing. Working in the mathematics classes with robots that were built by them also triggered the students’ learning intentions. The emotional relationship created with the robot they built to run and to win the races helped students to find motives to engage in school mathematics practice and in the learning of mathematics (Fernandes, 2013b).
The openness of the learning situation also created a fruitful environment to the emergence of the intentionality of the students. Robots as well as the challenge proposed to the students that had embedded a playful tone and the idea of gamification (Gee, 2008) also contributed to the reconstruction of students’ foregrounds regarding mathematics. The intentions-in-learning emerged, and learning as action arose naturally in mathematics classes.
After students have learned to programme with the aim of performing the three proposed challenges, they held races, and thereafter they searched for mathematical arguments for their own robot to become the winner, if possible.
The intention, action and reflection were closely connected with the practical activities, and its product was some physical element (a robot, a programme that makes what is expected and a race route that fits in the classroom). But, in the moment of finding mathematical arguments to choose the winning robot, the product was no longer a physical element; students had to create strategies and justifications to convince themselves and others that their perspective was a valid one. The transcription below supports the discussion of students’ conceptions about what means to solve a problem in mathematics class.
Res: What are you doing?
R: We have finished. We have already found the winner!
N: It is Jagunço.
Res: And how did you find out?
D: We calculated the average.
Res: Can you explain, please?
R: We calculated the average time of the races of each robot, and we assigned the robots’ classification.
D: The robot that has the best average is the first one; the robot that has the second best average is the second one and so on...
N: We are in the third position.
Res: Can you find a strategy that makes your robot become the winner?
D and R: Not worthy, teacher. We’ll never be the winner.
At this moment, students did not know that using different criteria would define a different winner. According to their conceptions about mathematics and about solving problems in the mathematics class, finding a solution for a problem is to solve the problem. So, the problem was solved: Jagunço was the winner.
Through questioning, the researcher tries to understand the students’ perspectives and to explore them, leading students to develop or abandon them, in order to construct a shared understanding of mathematical concepts. Furthermore, with this positioning, the researcher led students to reflect about their work and to recognise the mathematical ideas they used and also helped them to reconstruct the idea of what can be solving problems in the mathematics class. Through an inquiry process, the researcher fostered dialogue and moderated discussions in the small and large groups. The last question of the researcher ‘Can you find a strategy …?’ was formulated to challenge students, to open up new perspectives and also to keep them involved in the mathematical activity. Thus, the researcher is making visible other possibilities of robots’ classification. However, the students did not still understand what to do. Then, the researcher suggested, in the form of a hypothetical question:
Res: What if you analyse the times of the races, in order to find out who has the best of all racing times? (The researcher knew that the best racing time belonged to this group.)
Students understood the suggestion proposed by the researcher, and the zooming in was activated. Zooming in indicates a quest for shared perspectives. The entire dialogue presented in the episode shows the search for a shared perspective between the researcher and the students. It represents action, since students started analysing the data from the races, again.
After some minutes analysing the data, the students called the researcher and said:
D and R: Using this criteria we win.
Res: Can you explain it, please?
N: We have the best time of all races… if we use only the best time of each robot…
D, N and R: We win.
Res: Well done. Try to organise the information in order to present the classification of each robot…
The researcher moved away from the group to let the students work autonomously.
Through questioning, the researcher helped the students to see that their robot could also be the winner. This fact made students’ intentions for learning to emerge. They were able to find mathematical arguments to show that their robot could also be the winner. Thus, the researcher managed to establish a relationship between the classroom activity and students’ foregrounds regarding mathematics, helping them to reconstruct it and leading them to live meaningful experiences in maths classes.
So, the students create the following table (Table 6.1).
Then, the researcher asked them to explain the table.
D: First, we chose only the best time of each robot… in this way we win.
Res: Well done. We can say that you have chosen the ‘minimum time’ of each robot.
N: Yes… minimum time. Do you think we should write, in the table, minimum time instead of best time?
Res: Yes, I do… to use statistical language.
D: And what should we put instead of ‘worst time’?
Res: What term do you think we should put?
N: Maximum time?
Res: Yes. Very good. The lowest time is called minimum time, and the greatest time is called maximum time. These values correspond to the extreme values of the times of the races, of each set of data. How did you choose the second and the third robot position?
D: To be the second, we chose ‘the best worst time’.
Res: Can you explain it, please?
N: As the two robots have had the same ‘best time’, that is, the same ‘minimum time’, we decided that the one that had the lower... hum... hum... ‘maximum time’ would win.
Res: Ok. Have you used the sample range?
D: Sample range?
Res: Yes. You decided that, if there is a draw, the robot that has the smallest difference between the ‘maximum time’ and ‘minimum time’ wins, that is, the robot which has the lower range.
Throughout the above episode, the students have calculated and have used mathematical techniques but have also reflected upon the data collected in the race in order to build argumentation to justify that their robot had been the winner. Besides that, students solved problems as they appear in real life and not in a structured way as they usually appear in a traditional mathematics class.
The episode also shows evidence that the students gave meaning to the mathematical (statistical) contents by relating them to the races.
All groups, except one, were able to find out mathematical arguments to make their robot be the winner. Each group used a statistical measure (average, median, or minimum time) as an argument for their robot to be the winner of the races. The group that failed to make their robot to be the winner also sought mathematical arguments. But the data from their robot did not allow them to win. However, they were also analysing data within an inquiry process.
At the presentation of the conclusions and generalisations of their statistical analysis, students showed the criteria for a robot to be the winner using the statistical concepts in a correct way and explaining their meaning in the races, therefore showing that they learned statistics.
For the researcher, it was clear that students had learned mathematics, but the teacher felt the need to evaluate students also through a written test. In this test all the students got good grades.
Mathematics learning occurred within an inquiry process, by reflecting on mathematics and with mathematics. We may say that students have been developing their mathemacy competence (Skovsmose, 2011) once they have been dealing with mathematical concepts, applying them and reflecting on them. The lived experience opened the field of possibilities provided to these students and contributed to an ongoing construction and reconstruction of their foregrounds (Skovsmose, 2011) regarding mathematics. Most of the students became actively involved in mathematics classes and finished the middle school with good grades in mathematics.
6 Conclusions
The design of the learning scenarios in DROIDE II project was supported by theoretical assumptions that framed the research project, namely, our positioning towards learning as a situated phenomenon that embodies the notion of participation.
The creation and implementation of learning scenarios with robots revealed itself to be a powerful artefact (Engeström, 2001) to enhance mathematics learning (Fernandes, 2013a). In fact, learning scenarios, usually designed by teachers, are often presented to students as a reified product (Wenger, 1998) without explanation of the reasons underlying their creation. Therefore, students are not expected to participate in the negotiating of the fundamental aspects of the practice, leaving it meaningless to most of them. The fact that the students were cocreators of the learning scenarios in our research project was decisive for their involvement in the practice, because this aspect presupposes that the students’ intentionality is part of the process once they are allowed to participate in the negotiation of the several activities that constitute the practice. From this point of view, learning was also sought as action (Skovsmose, 2011), once students’ engagement was a central key in the process.
The openness of the situation proposed to the students and also the interdisciplinary nature that was potentiated from working around big themes – ‘Making a Movie’ and ‘Robot Race’ – were also important aspects of the learning scenarios. The thematic proposed, which in the project DROIDE II we call the ‘big idea’, led students to find motives to engage in the practice in which they were coactors. From the work held by students, teachers and researchers to achieve the ‘big idea’, learning mathematics (but not only that) emerged in an ongoing process. There was intentionality of teachers and researchers to bring out the mathematical contents. Nevertheless, it was not only the mathematical contents that governed the creation of the scenarios (Fernandes, 2013d). The ‘big idea’ is what Wenger (1998) also calls the joint enterprise. The joint enterprise is not dictated by someone who creates the scenario (and teaches) and is accepted by others who learn. It is jointly negotiated by the participants. For this reason, it was important that the research team created a ‘sketch’ of a scenario and opened the space so that the other actors could participate in their construction (Fernandes, 2013d). During the implementation of the learning scenarios, the initial intentions of the different actors were considered but also those that emerged along the way, with a view to achieving the objectives initially established and which were renegotiated throughout the process (Martins & Fernandes, 2015).
The working methodology adopted, including in it the researchers’ positioning and the questioning in both learning scenarios, was important because of how it emphasised the cooperation between students and between students and teachers, opening spaces for negotiation and sharing of mathematical meanings but also for negotiation of ways of acting and thinking in the mathematics class.
The creation of learning scenarios where challenges are posed (which entails the resolution of various mathematical and other problems) leads students to deal with knowledge from different areas and is a powerful artefact for mediating learning. Nevertheless, it requires a very different positioning of the teacher (in this case, the researchers had also this role), particularly in relation to the mastery of knowledge in their subject area, but also in other areas. The fact that the project team was pluridisciplinar was very useful. However, to think about the empirical field in a dialectical relationship with the theoretical framework was very fruitful to the decision-making.
When we are trying to understand learning, namely, mathematics learning, as a social phenomenon, it is important to pay attention to the social and cultural context in which it occurs. The analysis of the relationship between students and between students and teachers is a rich approach for understanding how the learning takes place. Equally important, the relationship between students and the tools they are using to learn is also central.
The artefacts people use in a certain activity cannot be constructed and conceptualised outside that activity. In fact, ‘artefacts should not be considered by themselves’ (Santos & Matos, 2008, p. 183); they can only be understood within their own history. The robots constructed by students in the researched learning scenarios are productions from developed practices in the implementation of those scenarios. For someone external to those two practices these robots would not be more than just ‘simple’ robots. For the students involved, these robots reify a history of participation in a practice and may represent an idealised character or a robot that allowed them to compete and eventually win a race. The robot reifies those practices as well as the mathematical ideas and concepts students used to create those characters or to win the race.
These robots transformed the way students negotiated the meaning of mathematical knowledge. As shown above, the position of straight lines, space and time were notions that were negotiated based on robots’ trajectories. In addition, statistics was a tool to make a robot become the winner of a race. Mathematics was, together with the robots, a tool to act in the learning scenarios. Robots reified the experience of learning mathematics, and certain mathematical concepts ‘were born’ in association with the robot (Fernandes, 2012). Mathematics emerged embedded in the work with robots, and as a result of that, students reconstructed the meaning of learning mathematics.
The robots had also a significant role over the reconstruction of students’ foregrounds, which are in themselves dynamic entities (Skovsmose, 2011). In the learning scenario ‘Robot Race’, the inclusion of the robots in the mathematics classroom, within the ‘big idea’ of the learning scenario, challenged the students’ positioning towards school mathematics learning.
‘There are no regulations and simple guidelines for establishing meaningful education and for anticipating students’ intentionality’ (Skovsmose, 2011, p. 30). But we can argue that school, and in particular mathematics education, have to create different learning scenarios, enriched with technologies, in order to open the field of possibilities for students to reconstruct the meaning of learning mathematics and of the usefulness of mathematics in problem-solving. And, for the students with ruined foregrounds in relation to mathematics (and to school), it may open the range of possibilities for them to reconstruct it, thus providing them with new opportunities in life.
Notes
- 1.
More information about each learning scenario can be found at http://www.cee.uma.pt/droide2/cenarios/index.htm and at http://www.cee.uma.pt/droide2/ebook
References
Abrantes, P., & Matos, J. F. (2012). Using activity theory to understand how using robots can foster learning of basic concepts of programming. In L. Gómez Chova, A. López Martínez, & I. Candel Torres (Eds.), 2012 Proceedings of the 6th International Technology, Education and Development Conference (pp. 299–305). Spain: Valencia.
Alrø, H., & Skovsmose, O. (2004). Dialogue and learning in mathematics education: Intention, reflection, critique. Dordrecht: Kluwer Academic Publishers.
Boaler, J., & Greeno, J. G. (2000). Identity, agency, and knowing in mathematical worlds. In J. Boaler (Ed.), Multiple perspectives on mathematics teaching and learning (pp. 171–200). Westport, CT: Ablex.
Carroll, J. M. (1999). Five reasons for scenario-based design. In Proceedings of the 32nd Hawaii International Conference on System Sciences, Hawaii. Retrieved 10 Jan 2015, from http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.106.5310&rep=rep1&type=pdf
Engeström, Y. (1987). Learning by expanding: An activity-theoretical approach to developmental research. Helsinki: Orienta-Konsultit.
Engeström, Y. (1999a). Activity theory and individual and social transformation. In Y. Engeström, R. Miettien, & R.-L. Punamäki (Eds.), Perspectives on activity theory (pp. 19–38). Cambridge: Cambridge University Press.
Engeström, Y. (1999b). Innovative learning in work teams: Analysing cycles of knowledges creation in practice. In Y. Engeström, R. Miettinen, & R.-L. Punamäki (Eds.), Perspectives on activity theory (pp. 377–404). Cambridge: Cambridge University Press.
Engeström, Y. (2001). Expansive learning at work: Toward an activity-theoretical conceptualization. Journal of Education and Work, 14(1), 133–156.
Fernandes, E. (2004). Aprender Matemática para Viver e Trabalhar no Nosso Mundo. [Learning mathematics to live and work in our world]. PhD thesis. Universidade de Lisboa. http://cee.uma.pt/people/faculty/elsa.fernandes/artigos/Tese%20EMdSF.pdf
Fernandes, E. (2012). ‘Robots can’t be at two places at the same time’: Material agency in mathematics class. In T. Y. Tso (Ed.), Proceedings of the 36th Conference of the International Group for the Psychology of Mathematics Education (Vol. 2, pp. 227–234). Taipei: PME.
Fernandes, E. (Ed.). (2013a). Aprender matemática e informática com robots. Funchal: Universidade da Madeira. Retrieved 10 Jan 2015, from www.cee.uma.pt/droide2/ebook/index.html
Fernandes, E. (2013b). The emergence of agency in a mathematics class with robots. In B. Ubuz, Ç. Haser, & M. A. Mariotti (Eds.), Proceedings of the Eighth Congress of the European Society for Research in Mathematics Education (CERME 8) (pp. 1725–1734). Ankara, Turkey: Middle East Technical University and ERME.
Fernandes, E. (2013c). Trigonometria - uma viagem ao centro da terra. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 96–102). Funchal: Universidade da Madeira.
Fernandes, E. (2013d). O que aprendemos sobre aprender com robots. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 248–259). Funchal: Universidade da Madeira.
Fernandes, E., & Santos, M. (2013). A visão da aprendizagem adotada no projeto DROIDE II. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 1–24). Funchal: Universidade da Madeira.
Frankestein, M. (1998). Reading the world with math: Goals for a critical mathematical literacy curriculum. In E. Lee, D. Menkart, & M. Okazawa-Rey (Eds.), Beyond heroes and holidays: A practical guide to K-12 anti-racist, multicultural education and staff development (pp. 306–313). Washington, DC: Network of Educators on the Americas.
Gee, J. P. (2008). Learning and games. In K. Salen (Ed.), The ecology of games: Connecting youth, games, and learning (pp. 21–40). Cambridge, MA: The MIT Press.
Jones, K. (2000, March). The mediation of mathematical learning though the use of pedagogical tools: A sociocultural analysis. Invited paper presented at the conference on Social Constructivism, Socioculturalism, and Social Practice Theory: Relevance and Rationalisations in Mathematics Education, Norway.
Lave, J., & Wenger, E. (1991). Situated learning: Legitimate peripheral participation. Cambridge: Cambridge University Press.
Lopes, P. C. (2012). Racing with robots. In L. Gómez Chova, A. López Martínez, & I. Candel Torres (Eds.), INTED2012 Proceedings of 6th International Technology, Education and Development Conference (pp. 6217–6221). Valencia: IATED.
Lopes, P. C. (2013). Uma corrida com robots. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 86–95). Funchal: Universidade da Madeira.
Lopes, P. C. (2016). Aprender matemática com recurso a tecnologias: Robots na sala de aula (PhD thesis). Universidade da Madeira.
Lopes, P. C., & Fernandes, E. (2012). Participation in a school mathematics practice with robots: Racing with robots. In T. Y. Tso (Ed.), Proceedings of the 36th Conference of the International Group for the Psychology of Mathematics Education (Vol. 1, p. 250). Taipei: PME.
Lopes, P. C., & Fernandes, E. (2015). Robots to learn statistics and citizenship. In M. F. Costae & B. V. Dorrío (Eds.), Hands-on science network (pp. 70–78). Braga: Universidade do Minho.
Martins, S. (2013a). ‘Regime of competence’ in a school practice with robots. In B. Ubuz, Ç. Haser, & M. A. Mariotti (Eds.), Proceedings of the Eighth Congress of the European Society for Research in Mathematics Education (CERME 8) (pp. 1774–1783). Ankara/Turkey: Middle East Technical University and ERME.
Martins, S. (2013b). Da escrita de uma história à produção de um filme. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 114–142). Funchal: Universidade da Madeira.
Martins, S. (2016). Aprendizagem de tópicos e conceitos matemáticos no 1.° Ciclo do Ensino Básico: Uma história com robots (PhD thesis). Universidade da Madeira.
Martins, S., & Fernandes, E. (2012). We perceive two minutes to be a fast achievement while for robots this presents a lifetime: Analyzing mathematics learning from a situated perspective. In T. Y. Tso (Ed.), Proceedings of the 36th Conference of the International Group for the Psychology of Mathematics Education (Vol. 4, p. 302). Taipei: PME.
Martins, S., & Fernandes, E. (2015). Hands-on mathematics with lego robots. In M. F. Costae & B. V. Dorrío (Eds.), Hands-on science network (pp. 161–165). Braga: Universidade do Minho.
Matos, J. F. (2010). Towards a learning framework in mathematics: Taking participation and transformation as key concepts. In M. Pinto & T. Kawasaki (Eds.), Proceedings of the 34th Conference of the International Group for the Psychology of Mathematics Education (Vol. 1, pp. 41–59). Belo Horizonte, Brazil: PME.
Matos, J. F. (2013). Cenários de Aprendizagem como recursos estruturantes da ação em educação. In E. Fernandes (Ed.), Aprender matemática e informática com robots (pp. 47–54). Funchal: Universidade da Madeira.
Rogoff, B., Turkanis, C., & Bartlett, L. (2001). Learning together – Children and adults in a school community. Oxford: Oxford University Press.
Santos, E. A. (2012). Robots as learning mediators in a virtual community of practice. In L. Gómez Chova, A. López Martínez, & I. Candel Torres (Eds.), INTED2012 Proceedings of 6th International Technology, Education and Development Conference (pp. 6222–6225). Valencia: IATED.
Santos, M. P. (2004). Encontros e Esperas com os ardinas de Cabo Verde: Aprendizagem e participação numa prática social (PhD thesis). Universidade de Lisboa. Retrieved 20 July 2013 from: https://sites.google.com/site/madalenapintosantos/doutoramento
Santos, M., & Matos, J. (2008). The role of artefacts in mathematical thinking: A situated learning perspective. In A. Watson & P. Winbourne (Eds.), New directions for situated cognition in mathematics education, Mathematics education library (Vol. 45, pp. 179–204). Boston: Springer.
Savenye, W. C., & Robinson, R. S. (2004). Qualitative research issues and methods: An introduction for educational technologists. In D. H. Jonassen (Ed.), Handbook of research on educational communications and technology (2nd ed., pp. 1045–1071). Mahwah, NJ: Lawrence Erlbaum.
Skovsmose, O. (1994). Towards a philosophy of critical mathematical education. Dordrecht: Kluwer Academic Publishers.
Skovsmose, O. (2011). An invitation to critical mathematics education. Rotterdam: Sense Publishers.
Skovsmose, O. (2012). Students’ foregrounds: Hope, despair, uncertainty. Pythagoras, 33(2), 1–8. https://doi.org/10.4102/pythagoras.v33i2.162
Vygotsky, L. S. (1978). Mind in society: The development of higher psychological processes. Cambridge, MA: Harvard University Press.
Wenger, E. (1998). Communities of practice – Learning, meaning and identity. Cambridge: Cambridge University Press.
Wertsch, J. (1991). Voices of the mind: A socio-cultural approach to mediated action. Hertfordshire: Harvester Wheatsheaf.
Wollenberg, E., Edmunds, D., & Buck, L. (2000). Anticipating change: Scenarios as a tool for adaptive forest management. A guide. Bogor: SMT Grafika Desa Putera.
Acknowledgement
The work reported in this chapter was developed under the support of the project Technology Enhanced Learning @ Future Teacher Education Lab supported by FCT under the contract number PTDC/MHC-CED/0588/2014.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Fernandes, E., Lopes, P., Martins, S. (2018). Learning Scenarios with Robots Leading to Problem-Solving and Mathematics Learning. In: Amado, N., Carreira, S., Jones, K. (eds) Broadening the Scope of Research on Mathematical Problem Solving. Research in Mathematics Education. Springer, Cham. https://doi.org/10.1007/978-3-319-99861-9_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-99861-9_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-99860-2
Online ISBN: 978-3-319-99861-9
eBook Packages: EducationEducation (R0)