
Abstract
The spatio-temporal parameters of gait can reveal early signs of medical conditions affecting motor ability, including the frailty syndrome and neurodegenerative diseases. This has brought increasing interest into the development of wearable-based systems to automatically estimate the most relevant gait parameters, such as stride time and the duration of gait phases. The aim of this paper is to investigate the use of body-worn accelerometers at different positions as a means to continuously analyze gait. We relied on a smart shoe to provide the ground truth in terms of reliable gait phase measurements, so as to achieve a better understanding of the signal captured by body-worn sensors even during longer walks. A preliminary experiment shows that both trunk and thigh positions achieve accurate results, with a mean absolute error in the estimation of gait phases of \(\sim \)12 ms and \(\sim \)31 ms, respectively.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Accelerometer
- Frailty
- Gait analysis
- Gait phase detection
- Smart shoe
- Sensorized shoe
- Thigh
- Trunk
- Wearable sensor
1 Introduction and Related Work
A person’s manner of walking can reveal important information related to health and well-being. For instance, some studies have shown that abnormal gait is linked with a higher risk of falling, and gait analysis has been proposed for automated fall-risk assessment [13]. Other works have shown that a deviation in gait patterns can be an early indicator of cognitive impairment caused by a neurodegenerative disease [3]. Furthermore, it has been demonstrated that some gait parameters are highly sensitive for the identification of the frailty syndrome, which is characterized by reduced strength and motor ability [10].
A gait cycle is defined as the interval between two consecutive heel-strike (HS) events of the same foot. The duration of a gait interval is known as stride time. Gait is further characterized by the instants at which a foot leaves the ground and starts “swinging” forward: this is known as a toe-off (TO) eventFootnote 1. For each foot, there are two phases: stance (ground support) and swing. When both feet are in the stance phase, the subject is said to be in the double support (DS) phase. The ratio between DS and swing is particularly important, as a relatively longer DS phase has been linked with the frailty syndrome [10].
The typical approach to gait analysis is observational: the patient is required to frequently visit an equipped lab, where a trained clinician visually inspects the patient’s gait during predefined tests. In the last years, there has been a significant effort for the development of automated techniques for gait analysis. Particular attention has been devoted to wearable sensor-based systems, as they enable the continuous monitoring of gait and other daily activities in uncontrolled environments [1, 2, 5]. To foster user acceptance, it is key to obtain an unobtrusive solution, possibly based on just one wearable device.
A commonly adopted trade-off between accuracy and usability is represented by placing a single wearable accelerometer over the lower trunk. In this context, an interesting evaluation of five different methods for the estimation of gait parameters is presented in [12]. Among the considered methods, a particularly relevant work is represented by [14], where the body’s center of mass trajectory during walk is modeled as an inverted pendulum. This model is then exploited to estimate some gait parameters, including the detection of HS events based on a simple analysis of antero-posterior acceleration. More recent works, like [7], attempted to also detect TO events by analyzing the vertical component of acceleration.
In this paper, we study the detection of foot contact events (HS and TO) with accelerometers placed at two different body positions: over the lower trunk (approximately near the L3 vertebra) and inside a front trouser pocket. The works described above used an optical system or an instrumented platform with force sensors for their experimental evaluation. Consequently, HS and TO events were measured only for a limited number of consecutive steps. In the experiment proposed in this paper, the ground truth is provided by a sensorized shoe, hence foot contact evaluation becomes possible even during longer and unconstrained walks. A similar approach was proposed by [8], which exploited instrumented insoles to validate gait analysis with an ear-worn sensor.
The technique that we used for gait analysis with the trunk sensor is inspired by the techniques presented in previous works [7, 14]. Differently, to the best of our knowledge, this is the first time that a pocket-worn device is used to detect foot contacts. This positioning could be exploited by smartphones, which are often carried in trouser pockets. Indeed some works, like the one recently presented in [9], have already evaluated the use of a smartphone’s accelerometer for gait analysis, but the smartphone was placed over the subject’s trunk.
2 Method
The sensor configuration used in this work is shown in Fig. 1. The user wears a single sensorized shoe and two Shimmer3 devices [11], one over the trunk (lower back) and one in a front trouser pocket (thigh). Hereafter, we refer to the two Shimmer devices as trunk and pocket sensors, respectively. Figure 1 also shows the anatomical directional references (vertical, antero-posterior AP, and medial-lateral directions).
In the following subsections, we first show the algorithm used to detect gait phases (i.e., stance and swing) using the sensorized shoe. Then, we describe the algorithms used to detect gait phases with the trunk and pocket sensors.

Sensor placement (trunk, pocket, shoe) and reference anatomical directions.
2.1 Sensorized Shoe
Previous works have shown that gait phases (i.e., stance and swing) can be estimated with high accuracy by means of a sensorized shoe. An example is represented by [4], where acceleration and force sensors were exploited to detect foot contacts. The force sensors recognize heel and toes contact times, whereas the accelerometer is used mainly to avoid wrong detections of steps when the user is not walking.
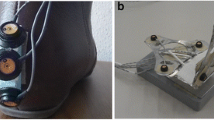
In this work we used a single sensorized shoe, hence stance and swing times are calculated only with respect to the foot wearing the sensors. The shoe is a FootMoov 2.0, which is a new version of the smart shoe produced by Carlos S.p.A. and described in [4]. As in the first version, sensors and electronics are fully integrated below the insole. However, the full set of sensors has been significantly upgraded. A 9-axis inertial measurement unit (IMU) is positioned under the heel to enable the assessment of foot spatial orientation. Five pressure sensors are available to monitor the mechanical interaction of the foot with the ground. Three of the pressure sensors are positioned under the forefoot, while the remaining two are under the heel. These sensors are custom-made piezoresistive transducers produced by using ink-jet printing of a conductive material on a flexible substrate. The Bluetooth 4.0 transmission module, fully integrated with the rest of the electronic unit in the heel of the shoe, enables low energy data transmission to a mobile device (smartphone, tablet).

Detection of gait phases with the sensorized shoe.
The algorithm used in this study only required the analysis of four force sensors, two under the heel and two under the forefoot. HS events are detected by using the two sensors in the posterior part of the shoe, whereas the two anterior sensors were used to detect TO events. The detection algorithm is described by the finite state machine in Fig. 2. Initially, the user is in the stance state. When all force sensor values are below a threshold (\(TO_{TH}\)), a TO event is detected and the user is in the swing state. Swing terminates when both of the posterior sensors measure a force above a threshold (\(HS_{TH}\)). As mentioned before, stance time is the interval between HS and TO, whereas swing time is the interval between TO and the following HS.
The foot contact times provided by the shoe are used as ground truth to validate the following methods based on body-worn accelerometers.

Detection of gait phases with the trunk sensor.
2.2 Trunk (Lower Back) Sensor
Shimmer3 devices include an ST Micro LSM303DLHC tri-axial accelerometer, which was set to operate within \(\pm 8\) g range. The reference frame of the trunk sensor is supposed to be approximately aligned with the anatomical directional references.
Figure 3 shows the acceleration during two consecutive gait cycles. More precisely, the thin line shows the acceleration magnitude signal (Euclidean norm of the three acceleration signals), whereas the thick line shows the acceleration on the AP direction.
The method to detect HS and TO events proceeds as follows. First, gait cycles are identified by using the walking detection algorithm presented in [6], which exploits the groups of acceleration magnitude peaks produced at each step. For each detected step, a region including the group of peaks (gray bands in Fig. 3) is considered to search for HS and TO events. More precisely, foot contacts are found by analyzing the AP signal: HS events correspond to a local maximum in the AP signal, as suggested in [14], whereas TO events correspond to a local minimum. The approach used to detect TO events differs from what we found in the literature, as typically vertical acceleration is used to detect TO events [7]. Detected HS and TO events are shown in Fig. 3 using squares and circles, respectively.

Detection of gait phases with the pocket sensor.
2.3 Pocket Sensor
A novel method is proposed to detect HS and TO events with an accelerometer carried in a front trouser pocket. The method enables the detection of the foot contacts produced by the leg that is carrying the sensor.
Figure 4 shows the same gait cycles as in the trunk example, this time measured with the pocket sensor. The thin line is the acceleration magnitude signal, whereas the thick line is the acceleration measured on the axis approximately aligned with the AP direction when the user is standing still. We use the letter z to refer to this axis: this corresponds to the reference frame typically adopted in smartphones (z is the axis orthogonal to the screen, and is approximately aligned with AP when the device is in a front trouser pocket). Differently from the trunk scenario, the pocket sensor “swings” during gait cycles because of leg movements, hence the orientation of the accelerometer with respect to gravity is not fixed.
Despite the significantly different pattern, the walking detection algorithm in [6] can still be used to detect steps and gait cycles by processing the acceleration magnitude signal. All the steps are highlighted with gray vertical bands. The proposed algorithm first needs to discriminate between the steps made with the leg carrying the sensor (dominant steps) and the ones made with the contralateral leg. To discriminate between dominant and contralateral steps the average value on the z axis is used: as shown in Fig. 4, during dominant steps there is a significant positive acceleration. Dominants are used to detect HS events by finding the local maximum value on z. Instead, contralateral steps are used to find TO events, by finding the local minimum on z. Detected HS and TO events are shown in Fig. 4 using squares and circles, respectively.
3 Evaluation and Discussion
For this preliminary experiment we recruited a healthy volunteer, who wore the three devices (sensorized shoe, pocket and trunk sensors) as in Fig. 1. The experiment consisted in walking two times through a straight corridor. In total, 44 gait cycles were performed. The shoe is capable of sampling force sensor data at \(\sim \)50 Hz, whereas the Shimmer’s accelerometers were sampled at \(\sim \)200 Hz and then downsampled to 50 Hz. All the collected samples were stored into persistent memory to ensure repeatable evaluation.
The force sensor signals on the shoe were used to find the following parameters for each gait cycle: stride time (i.e., the duration of a gait cycle), swing and stance time relative to the left foot (the one wearing the instrumented shoe). In our approach, these parameters represent the ground truth. The methods for gait phase detection at trunk and pocket position were applied to the respective acceleration samples. As a result, we obtained estimations of stride, swing, and stance time for each gait cycle, which can be compared with the ground truth provided by the shoe.
Table 1 shows the average gait parameters found with the three sensors. Interestingly, both trunk and pocket are able to estimate the three parameters with a maximum average error of 5 ms. More detail on the estimation error committed on each gait cycle is provided in Table 2, where it is shown the mean absolute error (MAE). The trunk sensor achieves higher accuracy, with a MAE between 11 and 14 ms. Notably, the error is significantly lower than the sampling period used (20 ms). This result confirms the accuracy reported by [12] for different approaches based on a single sensor placed over the trunk.
The results of the pocket experiment are promising. Despite the more challenging positioning (the orientation of the sensor changes during the swing phase), the average error is similar to the trunk experiment (Table 1), whereas the MAE is slightly higher (between 29 and 33 ms). The proposed technique is based on the assumption that one of the reference axes of the pocket sensor is approximately aligned with the AP direction. This is a reasonable assumption if we consider a smartphone carried in a front trouser pocket: due to the form factor of the device, the axis orthogonal to the screen is typically aligned with AP while the user walks. These results suggest that a smartphone could be used as a novel means to perform continuous gait analysis during everyday activities. In particular, the ratio between stance and swing times could be used to automatically detect early signs of motor ability issues.
In future work we plan to perform extensive experiments to further investigate the use of a pocket-worn device for gait analysis. Future experiments will take advantage of a higher sampling rate, and will include older adults with gait pathologies in the experiments. In fact, the results presented in this work, as well as in most of the works from the literature, have been obtained on healthy subjects. Specific experiments are required to prove that the methods can be used with (or adapted to) pathologic gait. Another important aspect that needs further investigation is the possibility of using a pocket-worn sensor to detect gait parameters relative to the contralateral leg (i.e., the leg that is not carrying the sensor). Finally, we plan to perform similar tests with a wrist-worn device, which could represent a further step towards unobtrusiveness and ease of use.
Notes
- 1.
Some other works refer to heel-strike and toe-off as initial foot contact (IC) and final foot contact (FC) gait events, respectively.
References
Alfeo, A.L., Barsocchi, P., Cimino, M.G.C.A., La Rosa, D., Palumbo, F., Vaglini, G.: Sleep behavior assessment via smartwatch and stigmergic receptive fields. Pers. Ubiquitous Comput. 22(2), 227–243 (2018)
Alfeo, A.L., Cimino, M.G.C.A., Vaglini, G.: Measuring physical activity of older adults via smartwatch and stigmergic receptive fields. In: ICPRAM, pp. 724–730 (2017)
Buracchio, T., Dodge, H., Howieson, D., Wasserman, D., Kaye, J.: The trajectory of gait speed preceding mild cognitive impairment. Arch. Neurol. 67(8), 980–986 (2010)
Carbonaro, N., Lorussi, F., Tognetti, A.: Assessment of a smart sensing shoe for gait phase detection in level walking. Electronics 5(4), 78 (2016)
Cola, G., Avvenuti, M., Vecchio, A.: Real-time identification using gait pattern analysis on a standalone wearable accelerometer. Comput. J. 60(8), 1173–1186 (2017)
Cola, G., Vecchio, A., Avvenuti, M.: Improving the performance of fall detection systems through walk recognition. J. Ambient Intell. Humanized Comput. 5(6), 843–855 (2014)
González, R.C., López, A.M., Rodriguez-Uría, J., Álvarez, D., Alvarez, J.C.: Real-time gait event detection for normal subjects from lower trunk accelerations. Gait Posture 31(3), 322–325 (2010)
Jarchi, D., Lo, B., Ieong, E., Nathwani, D., Yang, G.Z.: Validation of the e-AR sensor for gait event detection using the parotec foot insole with application to post-operative recovery monitoring. In: 11th International Conference on Wearable and Implantable Body Sensor Networks, BSN 2014, pp. 127–131 (2014)
Pepa, L., Verdini, F., Spalazzi, L.: Gait parameter and event estimation using smartphones. Gait Posture 57(June), 217–223 (2017)
Schwenk, M., Howe, C., Saleh, A., Mohler, J., Grewal, G., Armstrong, D., Najafi, B.: Frailty and technology: a systematic review of gait analysis in those with frailty. Gerontology 60(1), 79–89 (2014)
Shimmer (2017). http://www.shimmersensing.com
Trojaniello, D., Cereatti, A., Della Croce, U.: Accuracy, sensitivity and robustness of five different methods for the estimation of gait temporal parameters using a single inertial sensor mounted on the lower trunk. Gait Posture 40(4), 487–492 (2014)
Verghese, J., Holtzer, R., Lipton, R.B., Wang, C.: Quantitative gait markers and incident fall risk in older adults. J. Gerontol. Ser. A Bio. Sci. Med. Sci. 64A(8), 896–901 (2009)
Zijlstra, W., Hof, A.L.: Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 18(2), 1–10 (2003)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Avvenuti, M., Carbonaro, N., Cimino, M.G.C.A., Cola, G., Tognetti, A., Vaglini, G. (2018). Smart Shoe-Based Evaluation of Gait Phase Detection Accuracy Using Body-Worn Accelerometers. In: Perego, P., Rahmani, A., TaheriNejad, N. (eds) Wireless Mobile Communication and Healthcare. MobiHealth 2017. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 247. Springer, Cham. https://doi.org/10.1007/978-3-319-98551-0_29
Download citation
DOI: https://doi.org/10.1007/978-3-319-98551-0_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-98550-3
Online ISBN: 978-3-319-98551-0
eBook Packages: Computer ScienceComputer Science (R0)