
Abstract
MIT City Science Group (CS) studies the interaction of social, economic and physical characteristics of urban areas to understand how people use and experience cities with the goal of improving urban design practices to facilitate consensus between stakeholders. Long-established processes of engagement around urban transformation have been reliant on visual communication and complex negotiation to facilitate coordination between stakeholders, including community members, administrative bodies and technical professionals. City Science group proposes a novel methodology of interaction and collaboration called CityScope, a data-driven platform that simulates the impacts of interventions on urban ecosystems prior to detail-design and execution. As stakeholders collectively interact with the platform and understand the impact of proposed interventions in real-time, consensus building and optimization of goals can be achieved. In this article, we outline the methodology behind the basic analysis and visualization elements of the tool and the tangible user interface, to demonstrate an alternate solution to urban design strategies as applied to the Volpe Site case study in Kendall Square, Cambridge, MA.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


1 Introduction
In an era when more than 50% of the world’s population lives in cites and more than 80% of the global GDP is generated in urban centers, cities are becoming increasingly important for societal well being. Global populations are urbanizing at unprecedented rates and scales, mandating the need for urban planning and design practices that are scalable, streamlining much of the decision-making processes. Long-established urban planning practices, which are heavily reliant on institutional capacity and complex procedures, are falling short of the demands, resulting in single-use, auto-centric development patterns, and environmental degradation. However, collaboration tools that are widely accessible and provide evidence-based feedback, can greatly improve urban management processes.
Design and analytical tools such as CAD and GIS were developed for single-user professionals, and as such, feature limited capabilities for interaction (mainly mouse, keyboard and screen)[16]. Subsequent design and technology pioneers developed alternative interfaces that facilitate a more collaborative process of urban design, aided by computation and data analytics. In the early 2000s, a series of projects developed Tangible-User Interfaces (TUIs) for real-time design and collaboration. The Augmented Urban Planning Workbench [8], The Clay Table [9], The I/O bulb and the Luminous Room [19] mixed traditional and computational design processes using TUIs augmented by computational analysis. Larson’s ‘Louis I. Kahn - Unbuilt Ruins’ exhibition [12] utilized location tagged-building objects to allow users to localize themselves and navigate through a virtual built environment. These experiments all provided TUI innovations and proof-of-concept which eventually enabled the development of a more scalable, versatile platform for collaborative evidence-based urban planning.
In the past few years, the MIT City Science Group has been developing CityScope, a TUI platform that aims to reduce much of the coordination and collaboration challenges associated with traditional planning methodologies. CityScope facilitates consensus building through a participatory process, which allows community members, local authorities and design professionals to understand challenges, explore alternatives and receive real-time feedback in response to proposals and/or interventions. The system provides a framework to discuss the potential impact of proposals and policy interventions. It has three primary objectives: (i) to visualize complex urban data and the inter-relationships between urban systems, (ii) to simulate the impact of urban interventions and (iii) to support decision making in a dynamic, iterative, evidence-based process using a tangible interface.
The paper is organized as follows. Section 2 describes the main urban performance indicators incorporated into the CityScope platform. Section 3 describes a use case for the CityScope platform on the Volpe site. Finally Sect. 4 concludes the paper with a discussion of the strengths of this approach and the opportunities for further development.

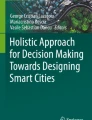
CityScope Volpe: a data-driven interactive simulation tool for urban design.

Abstraction process from the actual urban area into an interactive LEGO model which interfaces with mathematical models and simulations.
2 Urban Performance Indicators
As shown in Fig. 1 CityScope includes three core modules: (i) a physical 3D model, (ii) a tangible interactive interface for interventions and (iii) a computational analysis unit with a feedback system. In this section we focus on describing the urban performance indicators shown in Fig. 3. The computational analysis unit uses a number of tools to calculate a range of performance metrics as outlined in this section and produces feedback in the form of both spatial metrics and abstract statistics, which have been implemented using different software tools including Rhino [1], GAMA platform [6] and Unity [16].
Examples of spatial feedback include, but are not limited to, agent-based models for transposition and mobility information, visual graphs and heat-maps for proximity of residences to workplaces, and collision potential for interaction. The spatial feedback is mapped onto the 3D model using an array of vertical projections. The abstract metrics include global metrics of urban performance in relation to density, proximity, diversity, energy usage and innovation potential. These metrics are displayed using visual tools such as radar plots and bar plots and are displayed on a vertical screen as shown in Figs. 1 and 2. The combination of the tangible user interface and the real-time feedback systems allows users and stakeholders to collaborate more effectively by collectively performing rapid experimentation and receiving data-driven feedback.
As Jacobs describes in [3], fundamental correlations exists between urban form and urban performance - including quality of life, vibrancy, and safety. In this work, urban performance is analyzed and described in terms of social, economic and physical attributes or metrics, which are categorized under the headings of Density, Diversity, Proximity, Mobility, Building Energy and Innovation Potential [10]. This research is focused on understanding how these urban indicators interact to support well functioning urban ecosystems. The rest of this section describes the calculation of some of the key indicators used for real-time feedback in CityScope.
2.1 Density
Cities can be understood as the right ratio between housing, commercial space, retail venues, cultural institutions, and other amenities. This ratio must be calibrated to ensure positive outcomes resulting from increased density (greater exchange of ideas, higher wages, more employment options, better amenities, etc.), but with fewer negative outcomes such as traffic congestion, stress, loss of contact with nature, pollution, etc. [7]. The density of each building type or population (eg. amenities, residences, employment) can be computed as follows.
M = set of occurrences of m in district
A = area of district
2.2 Diversity
Well balanced urban ecosystems require a diversity of social, economic and spatial characteristics to ensure high levels of urban performance and resilience. The Diversity index is assessed using the Shannon-Weaver formula or [11] Balanced Ecosystem index: Quantitative measurement that reflects how many different types (species) there are in a dataset (community/ecosystem), and simultaneously takes into account how evenly the basic entities (individuals) are distributed among those types.
H = Shannon’s diversity index
S = total number of species in the community (richness)
\(p_i\) = proportion of the population made up of species i
2.3 Proximity
Urban proximity is used to assess the accessibility and closeness indexes between social, economic and physical activities and characteristics of urban environments [18]. Higher performing future cities will likely resemble networks of compact urban districts where resources and amenities of daily life are in close proximity to one another in walkable, vibrant communities [20].
CityScope can be used to test such adjacency scenarios, with near real-time feedback as parameters are changed through iterations. Metrics include walkable access to parks, housing, jobs, mass transit, schools, amenities, and other parameters, depending on the context. For a given ’goal object’, a proximity metric for a district can be calculated as follows.
\(B_i\) = Set of blocks in district i
SM = Set of “goal” objects (Parks, Residential, Office \(\ldots \))
dist(a; b) = Geographical distance between two elements’ centroids a and b
closest(j; Y) = Geographically closest element in set Y from block j’s centroid
2.4 Mobility
The use of Agent Based Modeling (ABM) in CityScope allows for the rapid exploration of mobility alternatives to private automobiles, including shuttle-on-demand systems, bike-sharing, on-demand autonomous vehicles, and other mobility strategies that enable an increase in density without traffic congestion and land-uses for vehicle storage. A model which simulates an artificial micro-environment and reacts to changes in land-use and mobility modes is used to explore mobility patterns. The model is described more in detail in [4]. The impacts of urban mobility can be quantified in a number of ways. For example, given a set of mobility patterns estimated from an ABM or an econometric approach, the total mobility energy can be calculated as follows:
\(E_m\) = Total mobility energy
M, L = The set of all transport modes and road network links respectively
\(v_l^m\) = The number of vehicles of mode m that travel on link l
\(s_l\) = The length of link l
\(e_m\) = The energy usage per unit distance traveled by mode m
2.5 Building Energy
Energy Consumption is calculated for structures within the the area of investigation using data about building envelope performance, building orientation, estimated embodied energy, and land-use information. CityScope aims to predict how overall energy consumption of the buildings will change given different urban configurations at preselected times of the year. The model uses a combination of building use, height, and proximity to adjacent structures (to account for solar gain) to determine the overall energy efficiency of the buildings within the area under consideration.
The index of energy efficiency is then found by dividing the total energy metrics of the buildings by the total energy input. [2, 17]
2.6 Innovation Potential
The ABM models enable the study of innovation potential in the city by creating a spatial graph where the agents are the node of the graph and where the edges are formed when an agent is close to one another. This graph is used to compute metrics such as density, degree distributions, correlations and centrality to indicate the likelihood of innovation in the city. [10] It is proposed that the total innovation potential in a district is related to the total collision potential between agents of different demographic groups. This collision potential can be defined as follows:
where
\(C_{A,B}\) = The collision potential between demographic groups A and B.
D = The set of all demographic groups under study
\(s_{ab}^t\) = The distance between agent a and agent b at time t
\(s_{max}\) = The maximum separation distance for interaction potential
3 MIT- Kendall Square Case Study
Over the past 20-years, Kendall Square in Cambridge, MA has undergone an extreme transformation as a result of the emerging biotech industry and knowledge-based economy,largely driven by the proximity to MIT and Harvard. Although workers in and around Kendall Square could benefit from living close-by, a limited housing stock and high land values make most residential opportunities in the area out of reach for young professionals, families, and seniors. With a residential density of only 3,000/km\(^2\), most people who work in Kendall Square commute long distances each day at the cost of energy and time. Affordable housing incentives for developers are inadequately promoting the necessary range of housing options, and the zoning ordinance has overly restrictive land-use requirements [14]. Parallel to low residential density there is great scarcity of services, amenities and 3rd-places, such as coffee shops, restaurants and bars, which tend to indicate the urban vitality of a place [13].
CityScope Volpe platform was built to investigate the redevelopment of the 14-acre D.O.T facility recently purchased by MIT. The physical 3D model is built using LEGO and covers a region of 1 km\(\,\times \,\)1 km at a scale of 1:762 m; one 4\(\,\times \,\)4 LEGO tile represents a 26.7\(\,\times \,\)26.7 m area. The abstraction provided by the model helps avoid high levels of detailed building-form and urban-design, allowing users to focus on the land-use and planning aspects of the urban environment. In addition, LEGO models provide a tangible interface easy to maintain, redesign and manipulate.
The TUI interactive section is integrated into the modeled surroundings to represent the area under development, Volpe site in this case as shown in Fig. 2. This intervention region utilizes CityMatrix [21], a CityScope tool designed to allow users to modify land-use and urban density by manipulating predefined physical pieces of LEGO tiles. Interchangeable tiles can represent different land-uses ranging from roads, parks, amenities, residential or office buildings. CityMatrix includes a physical UI components with sliders and toggles to change the building height and switch between alternative mobility modes. When users add or move these pieces, sliders, and toggles, they reshape the design of the urban area under study. These modifications are recorded and passed to the computational analysis unit in order to provide real-time feedback to the user.

Urban performances indicators of the district updates in real-time: density, diversity, proximity, mobility energy per person, social wellbeing (walkability, access to parks, etc.), and innovation potential (probability of creative collisions).
4 Conclusion
CityScope platform developed by City Science group at the MIT Media Lab leverages data-analytics, computation, visualization methods and an intuitive interface, to offer advantages over traditional planning and urban design practices. It allows for the rapid assessment of urban interventions which incorporates analytical and visualization components to enable dynamic or iterative, evidence-based decision making between traditionally siloed stakeholders ranging from community members and government officials, to domain experts and technicians. These intuitive data-visualizations help to simplify complex urban systems for users of varying disciplines and levels of expertise. The combination of a tangible user interface and real-time feedback facilitate consensus-building through collaborative experimentation allowing multiple stakeholders to address a wide range of interests simultaneously. Finally, the analysis and models which underly the feedback allow the planning process to become more transparent, data-driven and evidence-based.
Since early 2016, the Volpe platform has been used for numerous daily demonstrations, workshops and interactions with both the MIT community and decision makers. The interactions are being used to understand user reactions to the interface, as well as the underlying analytics behind the results. Thus far, the system has been adjusted on an ongoing basis to improve user experience. The next step of the research will be to conduct controlled workshops to verify the UI as well as the analytical components of the tool. In addition to the Volpe table, the CityScope platform has been developed and refined through a series of deployments in cities around the world that make up the growing City Science Network [5, 15]. Cities include Shanghai, Helsinki, Hamburg and Andorra all of who are working on different urban challenges. The CityScope platform continues to evolve in order to respond to the biggest challenges faced in varied urban environments of the global cities.
References
Day, M.: Rhino grasshopper (2009). Accessed 30 June 2014
Ferrão, P., Fernández, J.E.: Sustainable Urban Metabolism. MIT Press, Cambridge (2013)
Fuller, M., Moore, R.: The Death and Life of Great American Cities. Macat Library (2017)
Grignard, A., et al.: Simulate the impact of the new mobility modes in a city using ABM. In: ICCS 2018 (To be published) (2018)
Grignard, A., Macià, N., Alonso Pastor, L., Noyman, A., Zhang, Y., Larson, K.: Cityscope andorra: a multi-level interactive and tangible agent-based visualization (extended abstract). In: AAMAS 2018 (To be Published) (2018)
Grignard, A., Taillandier, P., Gaudou, B., Vo, D.A., Huynh, N.Q., Drogoul, A.: GAMA 1.6: advancing the art of complex agent-based modeling and simulation. In: International Conference on Principles and Practice of Multi-Agent Systems, pp. 117–131. Springer (2013)
Hawley, A.H.: Population density and the city. Demography 9(4), 521–529 (1972)
Ishii, H., et al.: Augmented urban planning workbench: overlaying drawings, physical models and digital simulation. In: Proceedings of the 1st International Symposium on Mixed and Augmented Reality, p. 203. IEEE Computer Society (2002)
Ishii, H., Ratti, C., Piper, B., Wang, Y., Biderman, A., Ben-Joseph, E.: Bringing clay and sand into digital design–continuous tangible user interfaces. BT Technol. J. 22(4), 287–299 (2004)
Katz, B., Wagner, J.: The Rise of Innovation Districts: A New Geography of Innovation in America. Brookings Institution, Washington (2014)
Kemeny, T.: Immigrant diversity and economic development in cities: a critical review (2013)
Larson, K.: Louis I. Kahn: Unbuilt Masterworks. Monacelli Press, New York (2000)
Montgomery, J.: Editorial Urban Vitality and the Culture of Cities (1995)
Noyman, A.: POWERSTRUCTURES: the form of urban regulations. Master’s thesis, Massachusetts Institute of Technology (2015)
Noyman, A., Holtz, T., Kröger, J., Noennig, J.R., Larson, K.: Finding places: HCI platform for public participation in refugees’ accommodation process. Procedia Comput. Sci. 112, 2463–2472 (2017)
Noyman, A., Sakai, Y., Larson, K.: Cityscopear: urban design and crowdsourced engagement platform. In: CHI 2018 CHI Conference on Human Factors in Computing Systems (To be Published) (2018)
Patterson, M.G.: What is energy efficiency?: concepts, indicators and methodological issues. Energy Policy 24(5), 377–390 (1996)
Sevtsuk, A., Kalvo, R., Ekmekci, O.: Pedestrian accessibility in grid layouts: the role of block, plot and street dimensions. Urban Morphol. 20(2), 89–106 (2016)
Underkoffler, J.: A view from the luminous room. Pers. Technol. 1(2), 49–59 (1997)
Westerink, J., Haase, D., Bauer, A., Ravetz, J., Jarrige, F., Aalbers, C.B.: Dealing with sustainability trade-offs of the compact city in peri-urban planning across European city regions. Eur. Plann. Stud. 21(4), 473–497 (2013)
Zhang, Y.: CityMatrix - An Urban Decision Support System Augmented by Artificial Intelligence. Master’s thesis, Massachusetts Institute of Technology (2017)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Alonso, L. et al. (2018). CityScope: A Data-Driven Interactive Simulation Tool for Urban Design. Use Case Volpe. In: Morales, A., Gershenson, C., Braha, D., Minai, A., Bar-Yam, Y. (eds) Unifying Themes in Complex Systems IX. ICCS 2018. Springer Proceedings in Complexity. Springer, Cham. https://doi.org/10.1007/978-3-319-96661-8_27
Download citation
DOI: https://doi.org/10.1007/978-3-319-96661-8_27
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-96660-1
Online ISBN: 978-3-319-96661-8
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)