
Abstract
In an urban environment, sewer flooding and combined sewer overflows (CSOs) are a potential risk to human life, economic assets and the environment. In this way, traditional urban drainage techniques seem to be inadequate for the purpose so to mitigate such phenomena, new techniques such as Real Time Control (RTC) of urban drainage systems and Low Impact Development (LID) techniques represent a valid and cost-effective solution. This chapter lists some of the recent experiences in the field of Urban Hydrology consisting in a series of facilities, fully equipped with sensors and other electronical component, to prevent flooding in urban areas. A series of innovative numerical analysis (in Urban Hydrology research) have been proposed to define properties of the hydrological/hydraulic models used to reproduce the natural processes involved.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Drainage Network
- Low Impact Development (LID)
- Combined Sewer Overflows (CSO)
- Urban Drainage Systems (UDS)
- Real-time Distributed Control (DRTC)
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
During the last few decades, the area of impervious surfaces in urban areas has exponentially increased as a consequence of demographic growth. This long-term process has altered the natural hydrological cycle by reducing the infiltration and evaporation capacity of urban catchments, while increasing surface runoff and reducing groundwater recharge. Moreover, the frequency of extreme rainfall events, characterized by high intensity and short duration, is expected to increase in the near future as a consequence of global warming [34, 38]. In addition, these processes have led to an increase in the frequency and magnitude of two undesired phenomena which negatively affect human life, economic assets and the environment: (i) local flooding and (ii) combined sewer overflows (CSOs) [44, 47]. Urban flooding occurs when the urban drainage system (UDS) overload during extreme rainfall events, causing untreated combined sewage and storm water to back up into basements and to overflow from manholes onto surface streets. This phenomenon is generally worsened by obstructions in conduits and manholes due to an infrequent maintenance.
CSO [42, 43] takes place when the wastewater treatment plant (WWTP) is not able to treat the wastewater delivered by the UDS. Specifically, the sewage and wet weather flows that exceed the WWTP treatment capacity. Specifically, the sewage and wet weather flows are conveyed through the UDS to the WWTP until the maximum treatment capacity is reached. The exceedance of the water flows is discharged directly into the receiving water bodies, such as rivers or lakes, without receiving any treatment. As a consequence, CSO is one of the major contributors to water pollution experienced in rivers, lakes, etc.
This work proposes two innovative alternatives to manage stormwater in urban areas:
-
1.
Direct management by using offline storage facilities with decentralized Real Time Control (RTC) system;
-
2.
Pervasive management by using Low Impact Development techniques (LID).
The offline storage facilities such as storage tanks, which have the goal to temporarily accumulate stormwater volumes, are widely used, even though they are often overly expensive due to the high construction and maintenance costs. In contrast, approaches aiming at temporarily accumulating stormwater volumes directly in the existing UDSs have also been developed thus avoiding large investments [5, 7, 52]. These approaches are supported by the fact that the UDSs are typically designed by taking into account a set of safety factors. In particular, conduits are intentionally designed to be larger than required in the case of typical network working conditions. Basically, the UDS is managed by a real-time control (RTC) system which requires the network to be embedded with sensors and actuators permitting the network to be real-time monitored and regulated so as to adapt to the different rainfall events [1, 19].
Previous studies in literature was focused on RTC based on a centralized approach. In the study of Pleau et al. [45] a sewer networks global optimal control (GOC) scheme with a two-level architecture has been designed. The upper level was composed of a central station, which computed flow set points, whereas the lower level was composed of local stations, which are used for monitoring, flow computation, data validation and feedback control. The real-time computer was dedicated to all RTC operations and supports a supervisory software, a GOC software, a non-linear hydrologic–hydraulic model and a non-linear programming algorithm. The site was controlled automatically under a flow set point computed by the GOC scheme. The optimization problem was defined by a multi-objective (cost) function and a set of equality and inequality constraints, based on the following control objectives: minimizing overflows, minimizing set point variations and maximizing the use of WWTP capacity. In Fu et al. [23] a multi-objective optimization genetic algorithm was proposed which is used to derive the Pareto optimal solutions, which can illustrate the whole trade-off relationships between objectives. In Schütze et al. [52] a global optimal predictive real time control system has been implemented, which involves solution of a multi-objective optimization problem. The control objectives were the minimization of overflows, the maximization of the use of the treatment plant capacity, the minimization of accumulated volumes and, finally, the minimization of variations of the setpoints. The real time control system was implemented at a central station and used flow monitoring and water level data, rainfall intensity data, radar rainfall images and 2 h rain predictions. Set-points were translated into moveable gate positions at local stations by Programmable Logic Controllers (PLC). In this work we illustrate the Distributed Real-Time Control (DRTC) system already proposed in previous studies [16, 24, 25]. A multi-agent paradigm and specifically a gossip-based algorithm has been exploited. The UDS was equipped with electronically moveable gates and a set of water level sensors spread across the network. All the gates are locally controlled by Proportional Integrative Derivative (PID) controllers which are globally orchestrated by the mentioned gossip-based algorithm thus achieving an optimal hydrodynamic behaviour in terms of CSO and flooding reduction. The case study is the UDS of the city of Cosenza (Italy), which is modelled by using the StormWater Management Model (SWMM) simulation software. SWMM is an open-source computer model widely used by the hydraulic engineering community for simulation of hydrodynamic water and pollutant transport in sewer systems. It is provided by US EPA [50] and permits an accurate simulation of the hydrological and hydraulic behaviour of the UDS during both dry and wet weather conditions. SWMM simulation software has been customized in order to allow it to be integrated with an external real-time control module. Experiments, conducted using a set of selected extreme rainfall, show a substantial reduction of both CSO and flooding when the proposed approach is exploited.
The other innovative approach presented here consist of implementation of pervasive technique. This approach to land development known as low-impact development (LID) has gained increasing popularity. LID systems consist of a series of facilities whose purpose is to reproduce the site’s pre-developed hydrological processes using design techniques that infiltrate, filter, store, evaporate, and detain runoff close to its source. Low-impact development practices consist of bioretention cells, infiltration wells or trenches, stormwater wetlands, wet ponds, level spreaders, permeable pavements, swales, green roofs, vegetated filter and buffer strips, sand filters, smaller culverts, and water harvesting systems. In recent years, researchers have focused their attention on applying and developing empirical, conceptual, and physically based models for LID analysis. In their review, Li and Babcock [36] reported that there were >600 studies published worldwide involving green roofs, with a significant portion of them related to modeling.
Benefits of LIDs in terms of runoff reduction and pollutants removal have been widely discussed in the literature [14, 26, 29, 32]
For example, Kamali et al. [32] investigated the performance of a permeable pavement under sediment loadings during its life span by evaluating the temporal and spatial clogging trends of this facility and by finding its vulnerability to sediment loadings during rainfalls. Zhang and Guo [68] developed an analytical model to evaluate the long-term average hydrologic performance of green roofs. Local precipitation characteristics were described using probabilistic methods, and the hydrological behavior of the system was described using mass balance equations. Carbone et al. [15] proposed a conceptual model to predict the hydraulic behaviour of a full-scale physical model of a vegetated roof, located at University of Calabria, Italy. The model idealized the vegetated roof as a system consisting of three individual components in series. A mass balance equation was applied to each block, taking into account the specific physical phenomena occurring in each module. The model was validated using dataset observed from the monitoring campaign carried out on the prototype of a full-scale vegetated roof. She and Pang [53] developed a physical model that combined an infiltration module (based on the Green–Ampt equation) and a saturation module (SWMM). The model calculates the water content in a green roof in a stepwise manner from the initiation of precipitation until saturation. In simulating the hydraulic response of green roofs to precipitation, an infiltration module is used before field capacity is reached and when no drainage is produced, while a saturation module is used after field capacity is reached and when drainage is produced. However, because runoff and infiltration can occur simultaneously during heavy precipitation, this stepwise approach may not be appropriate for a wide range of precipitation events.
Carbone et al. [12] developed a physically-based model using the explicit Finite Volume Method (FVM) for the infiltration process during rainfall events in green roof substrates. The model solves a modified version of the Richards equation which considers neglected the soil water diffusivity.
In another work, Huang et al. [29] proposed a numerical model for permeable pavements and also proved its applicability by applying it to simulate both hydraulics and water quality. The results of this study demonstrated a good agreement between field measurements and modeled results for three types of pavement in terms of hydraulics and water quality variables including peak flow, time to peak, outflow volume and TSS removal rates. The sustainable management of water resources requires the identification of procedures to optimize the use and the management of resources [17, 37]. As pointed out by several authors (e.g., [22, 65]), there is a strong demand for predictive models that can be applied across a range of locations and conditions to predict the general performance of a range of stormwater treatment measures. In addition, the heterogeneity of the materials that compose LIDs (concrete, gravel, soils, etc.) and their strongly unsaturated hydraulic behaviour, pose significant modelling challenges. In this way, several studies demonstrated that physically-based models can provide a rigorous description of various relevant processes such as variably-saturated water flow, evaporation and root water uptake, solute transport, heat transport, and carbon sequestration [10].
Although analytical and conceptual models represent a viable alternative to the numerical analysis of green roofs, their use suffers from several limitations. Conceptualization of the physical processes involved often leads to simplification of the system and a reduction in numerical parameters. While in a physical model each parameter has its own meaning, in conceptual models, lumped parameters often incorporate different components of the described process. These lumped parameters are case sensitive and need to be calibrated against experimental data, implying a lack of generality of the model itself. These drawbacks could represent a barrier to the use of modeling tools among practitioners who need reliable and generally applicable models.
For these reasons, in this work some techniques/procedures on how to interpret the hydraulic behaviour of several LIDs (green roof, permeable pavement) part of the “Urban Hydraulic Park” of the University of Calabria, south Italy, have been presented. It will suggest experimental and mathematical procedures for model calibration, which consists of: (a) experimental design (system construction, and number and character of measured transient flow data); (b) methods for independently evaluating of material hydraulic properties; (c) additional analysis of material hydraulic parameters using the transient flow data; and (d) model validation.
2 Real Time Control Approach
In urban areas with Combined Sewer Systems, stormwater and wastewater are collected in the same conveyance pipes. During heavy rainfall events, due to eventual obstructions in the pipes or to a poor maintenance, the surface runoff may overburden existing storm-water management facilities and cause flooding or combined sewage overflow into receptive water bodies.
Since the current drainage systems will fail to control and manage a constantly increasing runoff volume, and given the potential risk to human life, economic assets and the environment, an efficient adaptation strategy able to improve the flood resilience for the future urban environment is needed.
In this context, the main objective of this section is to illustrate a Distributed Real Time Control (DRTC) approach, proposed in previous studies [16, 24, 25], as a solution to mitigate CSO and reduce flooding at catchment scale. To illustrate the advantages of the flood alleviation strategy focused on DRTC, the drainage network of the city of Cosenza (south Italy), was chosen as a testbed. The proposal consists in instrumenting the existing urban drainage network with sensors and a series of movable gates that, by monitoring water level and the filling degree in each conduit, self-adjust in real time to optimize the storage capacity of the pipelines and reduce the CSO. In the following subsections will be described the components of the DRTC system and the approach used, then will be provided details regarding the implementation in the network and some results.
2.1 Components and Implementation of the DRTC System
In order to achieve the proposed goals and be controlled in Real Time, an urban drainage network needs to be instrumented with a series of components, whose conceptual organization is basically structured in control loops which can be implemented by hardware components including sensors, actuators, controllers and telemetry systems (Fig. 1). Sensors, by monitoring the process evolution, collect information about the current state of the system, actuators modify the monitored process and influence it, controllers adjust actuators with a certain objective and the telemetry system supports the data transmission among the different devices.

Control Loop Scheme. Simple arrows indicate data flows, bold arrows the actions. Bold letters indicate hardware components and italic letters indicate transferred information
With regard to urban drainage networks, most of the time RTC implementations are based on water level measurements. The selection of the correct equipment, together with the choice of an adequate communication system and the proper software to be used, is thus crucial for a durable and reliable installation of RTC systems in UDSs. More in detail, to improve the performance of existing drainage networks and balancing water level throughout the conduits of the network, so as to reduce water level in the more overloaded conduits, the drainage network needs to be implemented with the following equipment:
-
(i)
Water level sensors, which measure the water level in each conduit and the flow on the outfall;
-
(ii)
Moveable gates, functioning as actuators, which can be real-time regulated electronically;
-
(iii)
Computational nodes, which can host and execute the distributed control algorithm.
Sensors, which monitor water level and, hence, the degree of filling in each conduit, are positioned into pipes to evaluate flow depths and to monitor surcharge conditions during rain events. Since the mechanism cannot work properly if the increase of water level is not correctly perceived, it is important to correctly position the water level sensor, because if it is placed in the “underloaded” part the gate-agent would perceive a decreased water level instead of an increased one. In the proposed approach, this issues is addressed by deploying more than one sensor per conduit and taking the maximum sensed value as the water level value for the conduit.
Using the information acquired by the sensors, electronically Moveable Gates—functioning as actuators—can self-regulate to intelligently manage the storage capacity of the pipelines. The moveable gates are made up of mobile plates rotating around a horizontal hinge placed on the bottom of the conduit, as shown in Fig. 2. The gates are dynamically regulated in order to utilize the full storage capacity of the pipeline by accumulating the excess stormwater volume in the less overloaded conduits thus preventing CSO.

The down-hinged movable gate
The gate is completely closed when the plate rotates in a perpendicular position with respect to the flow direction. Conversely, the gate is fully open when the plate is parallel to the flow. When the gate is closed, the opening area is null and no flow rate is delivered from the node. An intermediate position of the gate corresponds to a partial opening degree. The gates, as actuators, are the regulators elements of the RTC system that are used to adjust flows and water levels in the controlled system.
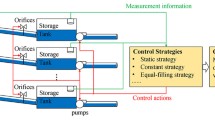
The manipulation of actuators in RTC systems is performed by control units (controller). A certain number of computing nodes are spread throughout the drainage network in order to cover all the points of interest. In particular, these devices read data received from local sensors through wireless connection, and collectively elaborate the acquired information in order to provide—according to the objectives—output adjustments to actuators and thus supply the gates with an “intelligent” behaviour (Fig. 3).

Schematisation of the DRTC system
The gates are located at the points of the network where subnetworks are connected to the main channel. Figure 4a shows the logical places for inserting the gates, while Fig. 4b shows the gates insertion in a case of a realistic network.

Gate position
Each computational node has a partial view of the network as it can read only from sensors which are located in its spatial neighbourhood and can actuate only gates it can physically reach. Thus, these devices dynamically regulate the gates according to the information acquired by the sensors in the neighbour areas. On the basis of the previous considerations the idea proposed lies in using a distributed agent-based architecture [66]. The agent paradigm has several important characteristics:
-
Autonomy: Each agent is self-aware and has a self-behaviour. It perceives the environment, interacts with others and plans its execution autonomously;
-
Local views: No agent has a full global view of the whole environment but it behaves solely on the basis of local information;
-
Decentralization: There is no “master” agent controlling the others, but the system is made up of interacting “peer” agents.
From the point of view of software architecture, the approach requires one agent per gate. Each gate-agent runs on one of the computational nodes covering the specific gate, it can perceive the local water level and communicate with the neighbouring gate-agents in order to elaborate a proper actuation strategy for its gate. In addition to the gate-agents, another agent, called outfall agent, is logically associated with the outlet node, it behaves the same as other agents except for the actuation part, indeed, it is not associated with any gate. For each generated network, an optimization algorithm, executed on computing nodes in a distributed fashion, leads to balance—in real-time—the water level perceived by the agents and aims to distribute equally the degree of filling of the conduits, thus preventing overcharge phenomena as far as possible. The proposed goal has been achieved by means of agents continuously executing two tasks:
-
1.
Figuring out collectively the average of the water level in the generated network;
-
2.
Each agent triggers its specific gate in order to bring the water level closer to that average.
Task 1 is accomplished by exploiting a Gossip-based aggregation [30] for dealing with the global aspect of the drainage network, while Task 2 is accomplished exploiting locally a PID controller [4]. Once an agent knows the global water level through the “gossip-based aggregation”, there remains the problem of appropriately tuning its gate so as to reach that “desired” level. This issue is addressed using the PID logic which, sending Proportional Integral and Derivative control action signals to actuators, can be used when you do not know an exact mathematical model of the system you want to control. A PID controller is a control loop feedback mechanism where an error value is computed as the difference between a measured output of a process and the desired value (setpoint). In the case studies proposed by Giordano et al. [24] and Garofalo et al. [25], each gate of the drainage network is controlled by a PID implemented by the gate-agent.
Once established the optimization computational operations to be carried out, the drainage network of Cosenza was simulated using a customized version of SWMM software, built for permitting it to Real-Time communicate with a separate Java controller which implements the algorithm described before. Further hardware and software details of this approach, which allows a dynamic management of the drainage network, are given elsewhere [24, 25].
2.2 Case Study: The Drainage Network of Cosenza
The test site chosen for the proposed approach and the hydrological modelling of the conversion scenarios was the Liguori catchment, a highly urbanized catchment in Cosenza. The catchment has a population of 50.000 inhabitants and a total surface area of 414 ha, of which almost one-half (48%) is densely urbanized and highly impervious, while the other 52% (202 ha) is pervious, occupied by natural areas (Fig. 5a).

a The Liguori catchment of Cosenza; b SWMM model of the drainage network of Cosenza
The catchment is drained by a combined sewer system that collects sanitary sewage and stormwater runoff in a single pipe system, conveying the entire water flow directly to the wastewater treatment plant (WWTP). During the most intense rainfall events, wet-weather flows occasionally exceed the capacity of the sewer system and the excess flows escape from the sewer system, via an overflow structure, as a combined sewer overflow (CSOs) [43]. Such overflows are directly discharged, without receiving any treatment, into the receiving water body, the Crati River.
In order to simulate the response of the LC drainage network to storm events, the sewer dataset and the physiographic characteristics of the sub-catchments, were imported into EPA-SWMM software [50] for the next hydraulic modelling of the drainage system. The software SWMM, provided by EPA, is an open-source computer model that allows a dynamic rainfall-runoff simulation for predicting hydrological and hydraulic behaviour of urban drainage systems and watersheds.
More in detail, in SWMM, the Liguori Catchment area was simplified in 296 sub-catchments, of which 258 are mostly urbanized (%Imp > 0.7) and 23 average urbanized (0.3 < %Imp < 0.7). The urban drainage network modelled in SWMM (Fig. 5b), instead, consists of 324 conduits with different shapes and sizes and a slope varying from 0.5 to 6%. Some pipes are circular and egg-shaped with diameters varying from 0.3 to 1.5 m and others are polycentric pipes. Finally, there are in total 326 nodes (with Outfall and Junctions functions) which represent the catch basins. The model used in this study was previously calibrated on the basis of several measurement campaigns [42]. Calibration parameters taken into consideration in flow modelling were surface roughness of the conduit (n), the impervious (N-Imperv) and pervious (N-Perv) surfaces in the catchment, and the depths of surface depressions on impervious (Dstore-Imperv) and pervious (Dstore-Perv) areas.
As previously said, for the purposes of the proposed studies, the drainage network was simulated using a customized version of SWMM built for the purpose for permitting it to communicate in real time with a separate Java controller which implements the algorithm described before. More in detail, in this version, the moveable gates are modelled as a transverse weir with the opening area equal to the conduit section area.
2.3 Experiences and Results
In the following section, the finding obtained from the DRTC application to the case study, will be described and discussed.
At first Giordano et al. [24] used and applied a totally decentralized RTC approach to a drainage network. In this study the experiments were carried out using a simplified network, which consists in a main channel of 1 m diameter and a total of 35 pipes inside the sub-networks, instrumented with a series of moveable gates and sensors which monitor water level and, hence, the degree of filling in each conduit, during severe rainy events. The water level in the pipes is balance by a combination of a Gossip-based algorithm, which ensures a global correct behaviour, and a PID controller used for each gate, so as to maintain locally its related water level as close as possible to the “suggested” value computed by the algorithm. The results have demonstrated that when the RTC is applied, the filling degree of conduits are much closer to each other as the load on the entire network is more balanced. This means that the network does properly exploit the residual water capacity of the undercharged conduits and the latter implies an improvement in the behavior of the critical conduit that reaches the overcharge condition later. The proposal provides positive effects on the overall hydraulic performance of the network as it is able to prevent (or delay) flooding events that would occur in the original (not instrumented) network. Following works, instead, focused on extending the algorithm and validating the DRTC approach in real drainage networks.
In the study carried out by Carbone et al. [16], the DRTC investigations have been extended to the real drainage network of Cosenza. To evaluate the effect of the moveable gates on reducing the storage capacity of the conduits, a part of the drainage network of Cosenza was investigated by comparing two scenarios of the CSS in SWMM: the existing configuration (Scenario 0) and a new one (Scenario 1) where six sluice gates were placed in the secondary conduits of the system. To investigate the response of the new configuration of the drainage system, three extreme events (dated March 1st, June 16th, October 8th) occurred in 2011 and which put in crisis the system, were analysed.
Specially, in Scenario 0 were identified 2 most overloaded pipes in the main conduit and used in this study to demonstrate the beneficial influence of gates in alleviating the most critical sections of the system. Two example results obtained for the Conduit 2 are reported in Fig. 6.

Temporal distribution of storage capacity for Conduits 2
Figures show the distribution of storage capacity for two of the analysed events and for both considered scenarios; as it can be noticed the storage capacity in Scenario 0 varies up to 100%; this mean that in some time points the selected conduits get completely full. Instead the filling degree is lower when sluice gates are used to control stormwater volumes. In Table 1 is reported the average storage capacity reduction for each event; the reduction varies from 22 to 77% showing lower value for the event with higher rainfall volume. However, as the authors have pointed out, the beneficial effect may be dependent upon the storm characteristics (such as hydrographs, intensity and duration).
The findings show that a series of devices inside the urban drainage systems are actually able to control the flow rate to drop the storage capacity to a reasonable value.
In Garofalo et al. [25], later, different scenarios have been analysed to evaluate the performance of the DRTC as a function of the number of the moveable gates placed in the system. As for the previous studies, the scenario without DRTC, which corresponds to the actual UDS, is called Scenario 0. The other scenarios, controlled by the DRTC, and differ according to the number of secondary pipes equipped with moveable gates: 91 for Scenario 1 (S1), 107 for Scenario 2 (S2), 214 for Scenario 3 (S3) and 322 for Scenario 4 (S4). The response of the UDS for all these scenarios is modelled for 15 independent rainfall events recorded in the weather station in Cosenza during the years 2010–2015.
In this work, for each selected rainfall event, were evaluated both CSO reduction (computed as the relative percentage difference between the CSO volume in the scenarios with DRTC and the Scenario 0), and the local flooding reduction (as the relative percent difference between the total flooding volumes from the conversion scenarios and the reference one). Referring to the Scenarios 1 and 4, was observed a CSO reduction which varies respectively between 2.7 and 83% (S1), and from 13 to 99% (S4), according to the rainfall events. The consistently higher CSO drop in the S4, demonstrates the beneficial effect provided by using a larger number of moveable gates. At the local level, thanks to the DRTC, the temporary stormwater detention provided in the less overloaded conduits, utterly prevents the UDS from local flooding in S1, where a drop of 100% is obtained for all the events. Otherwise, the S4 the risk of flooding is solely mitigated, with reductions varying from 2.4 to 13.4% for all the events, except for one event (dated 23 Nov. 2013), where a drop of 100% is obtained. As highlighted by the authors, the reasons why S4 offers a limited flooding reduction are strongly related to the high number of gates adopted. The high number of gates involved, able to exploit all the possible storage capacity of the network, makes the Scenario 4 the best choice in order to prevent the CSO, but it performs quite badly in terms of flooding reduction with respect to the other controlling scenarios. The reason for this behaviour lies in the fact that when the whole storage capacity is exploited, no additional water can be stored temporarily, and so a growth in incoming water flows produces unavoidable flooding phenomena. Therefore, these findings suggest that S2 and S3 are the most convenient solutions, since they offer the highest overall performance in terms of reduction of local flooding and perform well also with respect to the CSO reduction. Summing up, this study clearly demonstrated that the DRTC produced beneficial effects on the management of the UDS by substantially mitigating the risk of flooding and CSO.
More recently, Principato et al. [46], evaluated the potential of an integrated and sustainable approach for a better management of the drainage network. The main objective of this study was to assess the mitigation of CSO’s impact when dynamic (RTC) and static (LID) measures are simultaneously adopted to cope with greater stormwater volumes. With this purpose different conversion scenarios have been applied on a portion of the Liguori Catchment (LC) of Cosenza: Scenario1, emulates the behavior of the drainage network regulated by moveable gates controlled in Real Time, while Scenario2 investigate the hydrologic response of the network considering Green Roofs (GRs) implementation, in replace of impervious rooftops, in a portion of the LC. A last scenario (Scenario3) has also been developed to analyze the combined effect of RTC and GRs implementation, in the same portion of LC considered for the Scenario2. As a confirm of the studies already analyzed, also these model results revealed that the RTC of urban drainage system, equipped with a series of gates, provides beneficial effects to the overall hydraulic performance of the network. Results reported in Fig. 7, show that the filling degree of two selected conduits is lower when smart gates are used to control stormwater volumes: the peak reduction is around 29% for conduit 210 and 19% for conduit 211.

Temporal distribution of Filling Degree (h/d) of two conduits during two rainfall events
A novelty, compared to the studies already analyzed, are the results obtained from Scenario3, which prove the importance of an integrated approach on the overall hydraulic performance of the network, as a valid solution for controlling flooding in urban areas. In particular Fig. 8, which refers to the last conduit of the network, reveals that the coupling of distributed (RTC) and source control (LID) solutions, leads a further reduction of the filling degree also compared to Scenario1, for the most part of the event chosen.

Temporal distribution of Filling Degree (h/d) of the last conduit of the network during two rainfall events
In conclusion, the use of smart moveable gates provides beneficial effects to the overall hydraulic performance of the network during critical rainfall-runoff events, offering an alternative and valid solution for controlling flooding in urban areas. The advantage of this system is to utilize the full storage capacity of the pipeline by accumulating the excess volumes of rainwater that otherwise would be spilled out in the pipes with a low water level. The advantage is also from the economic point of view because it takes advantage of the existing sewer system.
3 LID Approach
Despite the hydrological benefits of LIDs are already studied in literature, these techniques are not yet widespread probably because modelling tools often used simplified methodologies, based on empirical and conceptual equations, which do not take into account hydrological processes in a physical way. In addition, the hydraulic properties of LIDs materials have not been investigated in a comprehensive manner, limiting the investigation only to specific properties [59]. In this way, Brunetti et al. [8, 9] proposed an innovative approach to investigate the hydraulic behaviour of several LIDs using a mechanistic model coupled with specific numerical analysis to explore the hydraulic properties of LIDs techniques. The LID systems considered in this chapter are all implemented in the “Urban Hydraulic Park,” which includes a permeable pavement, a stormwater filter, and a sedimentation tank connected to a treatment unit.
3.1 Green Roof Experience
To analyse the green roof and LIDs hydraulic behaviour, as discussed in the Introduction sectin, different models from the conceptual and analytical to the mechanistic ones have been developed and widely used, but very few studies have focused on a comprehensive analysis of the hydrological behavior of a green roof. Starting from this assumption Brunetti et al. [8] carried out an accurate and comprehensive analysis of Variably Saturated Hydraulic behavior of the experimental green roof installed at University of Calabria by using HYDRUS 3D. The experimental green roof (GR), considered in the study, was built on a fifth-floor terrace of the Department of Mechanical, Energy and Management Engineering (DIMEG) at the University of Calabria (Italy), in Mediterranean climate region. The area of an existing roof was parcelled into four sectors: two sectors are vegetated with the same native Mediterranean species (Carpobrotus edulis, Dianthus gratianopolitanus, and Cerastium tomentosum), but present different drainage layers; a third sector is mostly characterized by spontaneous vegetation; while the last sector is the original roof, considered as the reference compartment for experimental data analysis.
The water supply of GR is guaranteed by reusing the green roof’s outflow, collected in a specific storage tank and distributes through a drip irrigation system during drought periods. The Rainwater Harvesting (RWH) system (Fig. 9, left), designed ad hoc for the site specific, consists of: (1) a system for collecting rainwater from the experimental site; (2) a storage tank of 1.5 m3 with a pump to relaunch the irrigation system; (3) a connection system with the water supply to ensure the full satisfaction of irrigated demand in any condition. When the storage capacity of the tank is reached, the overflow is directly discharged into the sewer system. The drip irrigation system is currently actioned by an electric valve at predetermined time, and the irrigation rate is recorded by a water counter with a frequency of 1 min.

Schematic representation of the RWH system to collect the rainwater from green roof (left) and the inset of a cross-section of the GR (right)
3.1.1 Modeling Theory
To investigate the hydraulic behaviour of the GR and finally to evaluate a possible optimization strategy of the specific green roof, it is necessary to proceed first of all with a detailed description of its stratigraphy (Fig. 9 on the right). Thus, the GR considered in the study, characterized by an area of 50 m2, an average slope of 1% and vegetated, as described before, with native species, consists from top to bottom of: a soil substrate, with a maximum depth of 8 cm, composed of a mineral soil consisting of a hetero-disperse Particle Size Distribution (74% gravel, 22% sand, and 4% silt and clay); a permeable geotextile; a drainage layer in polystyrene foam with a storage capacity of 11 L/m2 and a drainage capacity of 0.46 Ls–1 m–2; an anti-root layer and a waterproof membrane.
A weather station located directly at the site collect precipitation, velocity and direction of wind, air humidity, air temperature, atmospheric pressure, and global solar radiation [11]. Rainfall data are measured every minute by using a tipping bucket rain gauge with a resolution of 0.254 mm. While the outflow from each sector is recorded at the base of the building by a flowmeter device composed of a PVC pipe with a sharp-crested weir and a pressure transducer (Ge Druck PTX1830) to estimate the water level inside the pipe.
In the work of Brunetti et al. [8] two-months rainfall data from 2015-09-01 and 2014-10-30 were used and the Penman-Monteith equation [2] was implemented to estimate the hourly reference evapotranspiration. To model the water flow in unsaturated soils by the Richards equation, and, thus, estimate the water retention function θ(h) and hydraulic conductivity function K(h), the evaluation of unsaturated hydraulic properties of GR substrate was carried out by implementing a simplified evaporation method with the extended measurement range (down to –9,000 cm) [60]. While to simultaneously fit θ(h) and K(h) to the experimental data obtained by the evaporation method, HYPROP-FIT [41] numerical optimization procedure was used. For the description of soil hydraulic properties, first of all the unimodal van Genuchten–Mualem (VGM) model [62] was implemented; next, since the unimodal VGM model couldn’t always describe the full complexity of measured data, the bimodal model of Durner [20] was taken into account. Results of the experiments are reported in Table 2.
To describe the complex physical features of the experimental green roof, HYDRUS-3D software [54], which solves the Richards equation for multi-dimensional unsaturated flow, was used implementing the parameters obtained with the evaporation method. Finally, to evaluate the agreement between measured and modeled hydrographs the Nash-Sutcliffe Efficiency (NSE) index [40] was evaluate.
The results concerning the estimated soil hydraulic parameters with their confidence intervals, reported in this study revealed that the bimodal function presents a more accurate description of the retention curve. While the findings obtained during the validation process showed that: the unimodal and bimodal models are both able to accurately describe the GR hydraulic behavior; a higher precision is achieved by the bimodal model; both model slightly overestimate the outflow.
In addition, starting from the assumption that critical rainfall events occur in a very short time [8, 13] have investigated the hydrological response of the GR to single precipitation events. The results obtained for four rainfall events with different total precipitation volume (Vprec) in terms of peak flow reduction Pred (%) and volume reduction Vred (%), for both modeled and measured outflow, are shown in Table 3 and Fig. 10. By the analysis of this results the authors concluded that the green roof hydraulic performance was affected primarily by the antecedent substrate moisture and secondly by the precipitation pattern.

Rainfall (blue area) and modeled (cyan area) and measured (red line) outflow for four selected rainfall events in the analysis of the hydrological performance of the green roof during single precipitation events; Pred meas and Pred mod are the measured and modeled peak flow reductions, respectively, and Vred meas and Vred mod are the measured and modeled volume reductions, respectively
3.1.2 Future Perspective: GR and RHW from a Smart and Innovative Point of View
The integration of GR and RWH system, like in the case of the experimental site of University of Calabria, allows considerable benefits in terms of rational management of water resource. Furthermore, different studies have considered the RWH systems as a good strategy to limit environmental impacts that the on-going urbanization produce on the drainage network and receiving water bodies [48].
However, so far, these techniques (GR and RWH) have been studied from a purely hydrological-hydraulic point of view, there are no studies that consider these ones as smart objects for an integrated management of the water resource and urban drainage system.
In light of this, an innovation in the field of Urban drainage is look at the single techniques GR and RWH as smart objects, optimizing them with ICT technologies, based on the IoT (Internet of Things) paradigm.
A new aspect, in fact, could lie in the integration of GRs and RWH techniques through a complex network equipped with: sensors, which allow rapid quantitative assessments from a hydraulic, energy and environmental point of view; regulators or actuators, able to modify the processes in progress; transducers that allow the conversion of the data detected in command; control units that report the variables to the pre-established threshold values.
According on what was previously discussed about Green Roof experimental site of University of Calabria, the rainwater collected in the storage tank is re-introduced through the irrigation system at fixed time and in quantity set by the operator of the experimental site. The optimization of this system could be achieved by considering the smart automation through the estimation of water content and the evaluation on the wheatear situation. More in detail, when the water content, monitored by specific sensors dislocated within the layers of the green roof, falls below a threshold value that causes the plant water stress, the smart system sends a command to activate the irrigation withdrawing the water from the storage tank in the needed rates to re-reach the appropriate water content. The Weather Station located at the experimental site offers also the opportunity to make preventive estimates, based on the rainfall regime and solar radiation recorded on the site, so as to better calibrate the operation of the irrigation system.
Through these innovative strategies, in fact, not only a hydraulic benefit would be obtained, optimizing the reuse of the rainwater and reducing the flow to the drainage system, but also a thermo-energetic one. The activation of the irrigation system could also be carried out following the temperature measurements in the rooms below in order to improve the summer thermal comfort of the building.
Furthermore, if we consider the possibility of reusing water for other domestic uses (WC flushing, machine washing, ect.), it is possible to achieve total system hydraulic efficiency with minimum runoff discharge in the sewer system. In this case, the collected rainwater could be reused totally, avoiding that, in autumn and winter season, when irrigation demand is lower and precipitations increase, the storage tank exceeds the maximum value and the overflow is directly sent in the drainage network.
This innovation could be extended to the integration of others LID techniques (green wall, permeable pavement, etc.) with RWH systems in order to maximize the hydraulic, environmental and energy efficiency of these solutions. Furthermore, it would be appropriate to develop of an optimization algorithm that not only includes local actions for the building-scale system, but also evaluates the efficiency on the district and basin scale to favour smart and eco-sustainable neighbourhoods. The smart system, so thought, could be classified in function of its Hydraulic Efficiency Class, i.e. the rainwater rate spilled in the urban sewer system.
3.2 Permeable Pavement Experience
Lack of studies in literature focused on the description of the hydraulic behavior of a permeable pavement in a comprehensive manner suggested that research is particularly needed in the development and identification of accurate modeling tools for the analysis of LID practices, especially for permeable pavements.
In their work, Brunetti et al. [9] explored the suitability of the HYDRUS mechanistic model to correctly describe unsaturated flow in typical permeable pavement, installed at the experimental site of the University of Calabria. Multiple uniform and nonequilibrium flow models included in HYDRUS-1D, such as single and dual-porosity models, are used to define the hydraulic behavior of the permeable pavement. The problem was addressed by combing a Global Sensitivity Analysis (GSA), used to prioritize the hydraulic parameters and identify those that are non-influential, with a Monte Carlo filtering approach, used to investigate the parameter space and identify behavioral regions. Results from these analysis are then used in the calibration process conducted with the Particle Swarm Optimization (PSO) algorithm. Finally, the calibrated model was validated on an independent set of measurements.
The studied permeable pavement has an area of 154 m2, an average slope of 2%, and a total depth of the profile of 0.98 m. Figure 11 shows a schematic of the permeable pavement, consisting of 5 layers.

A Schematic of permeable pavement
The surface wear layer consists of porous concrete blocks characterized by high permeability (8 cm depth). Base (35 cm depth), sub-base (45 cm depth) and bedding layers (5 cm depth) were constructed by following the suggestions of the Interlocking Concrete Pavement Institute (ICPI), which recommends certain ASTM stone gradations.
A weather station located directly at the site measures precipitation, wind velocity and direction, air humidity, air temperature, atmospheric pressure, and global solar radiation. Rain data are measured by a tipping bucket rain gauge with a resolution of 0.254 mm and an acquisition frequency of one minute. Climatic data are acquired with a frequency of 5 min. Data are processed and stored in the SQL database.
Outflow from the pavement is measured by two flux meters, composed of a PVC pipe with a sharp-crested weir and a pressure transducer. The pressure transducers were calibrated in the laboratory by using a hydrostatic water column, linking the electric current intensity with the water level inside the column. The exponential head-discharge equations for the two PVC flux meters were obtained by fitting the experimental data with a coefficient of determination R2 = 0.999 for both devices. No measurements of pressure heads or volumetric water contents inside the pavement were taken.
Two month-long data sets were selected for further analysis. The first data set, which started on 2014-01-15 and ended on 2014-02-15, was used for parameter optimization and sensitivity analysis. Total precipitation and total potential evapotranspiration for the first data set were 274 and 43 mm, respectively. The second data set, which started on 2014-03-01 and ended on 2014-03-31, was used for model validation. Total precipitation and total potential evapotranspiration for the second data set were 175 mm and 81 mm, respectively. The second data set was selected so that it had significantly different meteorological data than during the first period. The optimization set is characterized by multiple rain events with few dry periods. The validation set has fewer rain events, which are concentrated at the beginning and end of the time period and separated by a relatively long dry period between. Surface runoff was not observed during these time periods.
Potential evaporation was calculated using the Penman-Monteith equation [2]. The permeable pavement was installed in 2013 and has been constantly exposed to atmospheric conditions and traffic since then that has altered the surface roughness and color. For these reasons, an albedo of 0.25 was used as suggested by Levinson and Akbari [35] for weathered gray cement.
3.2.1 Modeling Theory
Water flow simulations were conducted using the HYDRUS-1D software [57]. HYDRUS-1D is a one-dimensional finite element model for simulating the movement of water, heat, and multiple solutes in variably-saturated porous media. HYDRUS-1D implements multiple uniform (single-porosity) and nonequilibrium (dual-porosity and dual-permeability) water flow models [56].
Two different conceptual models have been used to study the unsaturated water flow in the pavement structure. Scenario I assumed that water flow in all five soil layers of the permeable pavement can be described using the classical single-porosity approach (SPM) described using the one-dimensional Richards equation:
where θ is the volumetric water content [–], h is the soil water pressure head [L], K(h) is the unsaturated hydraulic conductivity [LT–1], t is time [T], and z is the soil depth [L]. The soil hydraulic properties are described by the van Genuchten–Mualem relation [62].
Scenario II assumes a single-porosity model for the wear layer, the bedding layer, and the protection layer, and a dual-porosity model for the base and sub-base layers. This configuration was selected in order to consider the occurrence of preferential flow in the coarse layers of the pavement that are composed of crushed stones, with particle size diameters ranging from 2.5 to 37 mm in the base layer and from 20 to 75 mm in the sub-base layer. Crushed stones were washed before installation in order to remove fine particles. From a physical point of view, the structure of the base and sub-base materials closely resembles fractured aquifers [6].
In this way, the classical approach to model water flow in fractured porous media is the so-called “dual-porosity” or “mobile-immobile water” (MIM) approach [6, 63, 64]. This approach assumes that flow occurs only in the mobile fracture domain, while water in the matrix domain is immobile with a coefficient Γw that represents the mass transfer between two domains, which is assumed to be proportional to the difference in effective saturations of the two regions [55, 56].
In this, Scenario II thus includes 20 parameters (additionally also ω and θs of the immobile domain for the base and subbase layers).
3.2.2 Global Sensitivity Analysis
A sensitivity analysis (SA) can identify the most influential parameters and their interactions and how these parameters affect the output [51].
Most SAs performed in the literature of environmental sciences are the so-called ‘one-at-a-time’ (OAT) sensitivity analyses, performed by changing the value of parameters one-at-a-time while keeping the others constant [18, 28, 49].
One of the most widespread algorithms for the GSA is the variance-based Sobol’ method [58]. Variance-based methods aim to quantify the amount of variance that each parameter contributes to the unconditional variance of the model output. For the Sobol’ method, these amounts are represented by Sobol’s sensitivity indices (SI’s). These indices give quantitative information about the variance associated with a single parameter or related to interactions of multiple parameters. For a more complete explanation about the Sobol’ method, please refer to Sobol’ [58].
In order to assess the accuracy of estimations of the sensitivity indices, the bootstrap confidence intervals (BCIs) [21] were estimated. The rationale of the bootstrap method is to replace the unknown distribution with its empirical distribution and to compute the sensitivity indices using a Monte Carlo simulation approach where samples are generated by resampling the original sample used for the sensitivity analysis. In our case, the q samples used for the model evaluation were sampled 1000 times with replacement, whereby Sobol’s indices were calculated for each resampling. In this way, 95% confidence intervals are constructed by using the percentile method and the moment method [3].
The sensitivity analysis was conducted using the programming language Python and in particular, the Sensitivity Analysis Library (SALib) [61]. An elaborated script overwrites the input file containing the parameters for different materials at each iteration. The script then executes HYDRUS-1D, which usually runs less than one second.
As stated before, the GSA was also coupled with a basic Monte Carlo filtering in order to identify behavioral regions in the parameter space and to reduce the uncertainty in the following parameter estimation step by using the same sample and runs of the GSA. Potential solutions are divided into two groups depending on the value of the objective function calculated: behavioral, solutions with NSE > 0.0, and non-behavioral, solutions with NSE ≤ 0.0. Particle Swarm Optimization Inverse modeling is a procedure to estimate unknown parameters of the model from experimental data. In this work a global search method based on Particle Swarm Optimization (PSO) [33] have been used. PSO has been used in multiple studies involving inverse modeling with complex environmental models [27, 31, 67]. In PSO, collections of “particles” explore the search space, looking for a global or near-global optimum.
For the optimization process, a modified version of the PySwarm Python Library has been used.
3.2.3 Experimental Results
Results from SA indicated that only two parameters exhibit a significant direct influence on the output’s variance, the pore-size distribution index n1 and the air-entry pressure parameter a1. The third most influential parameter, the saturated hydraulic conductivity Ks1, has the effect, which is only half of the second most influential parameter, a1. Ten parameters have a first-order index lower than 1%, which indicates that their main effect on the output variance is negligible.
In addition, SA showed that almost 75% of variance in simulated outflow is caused by n1, either by the variation of the parameter itself (30%) or by interactions with other parameters. Together with a1 (51%) and Ks1 (42%), it is the most influential parameter for simulated flow. It can be noted that the saturated hydraulic conductivity, Ks1, has a relatively low main effect but a relatively high total effect. That indicates that this parameter has a limited direct effect on the variance of the objective function, but it has an effect in interactions with other parameters.
The effect of the sub-base layer on the output is less significant, while the wear layer strongly conditions the output.
A Monte Carlo Filtering procedure was applied to the runs of the GSA. The threshold value of NSE = 0.0 produced a filtered sample composed of 1,452 behavioral solutions.
Also, for Scenario II, parameters a1 and n1 exhibit the highest main effects on the output’s variance (about 35%). For both scenarios, modeling results are most sensitive to the wear layer, which strongly influences the output’s variance. However, in Scenario II, the influence of the wear layer is partially reduced and redistributed to other layers. It is evident that the adoption of the dual-porosity model for the unsaturated hydraulic properties significantly affects the influence of the base and sub-base layers on the model’s output. The dynamics of sensitivity indices between the two scenarios suggest that the physical description of unsaturated flow in the sub-base layer is an important element in numerical simulations.
A Monte Carlo Filtering procedure was again applied to the runs of the GSA. The filtered sample now consisted of 28,107 behavioral solutions. The filtered sample of behavioral solutions for Scenario II was considerably larger than for Scenario I. This indicates that the implementation of the dual-porosity model leads to higher values of the objective function.
Figure 12 compares measured and modeled hydrographs for the two scenarios. The PSO for Scenarios I and II resulted in NSE values of 0.43 and 0.81, respectively. Both NSE values of the objective function are higher than zero and thus admissible [39]. However, the implementation of the dual-porosity model for the base and sub-base layers in Scenario II provides a more accurate description of the hydraulic behavior of the permeable pavement.

Comparison between the modeled and measured hydrographs for Scenarios I (top) and II (bottom) for the optimization process
In order to evaluate the reliability of the estimated parameters, the model has been validated on another independent set of experimental data. Figure 13 shows a comparison between measured and modeled hydrographs for the two scenarios during the validation period.

Comparison between the modeled and measured hydrograph for the two scenarios for the validation period
The value of the objective functions is NSE = 0.43 for Scenario I and NSE = 0.86 for Scenario II. For Scenario I, the value of the objective function remains the same, which confirms the reliability of the calibrated model. Although the simulated hydrograph provides an overall sufficiently accurate description of the hydraulic behavior of the pavement, it is less accurate during rainfall events, which may be a time period of main interest. For Scenario II, the value of the objective function actually increased and reached the value NSE = 0.86, which is very high and reflects the accuracy of the modeled hydrograph.
4 Conclusion
The aim of this chapter was to presents the recent experiences in the Urban Hydrology field able to manage stormwater in a correct way. The cited works have shown how the smart management of the drainage networks and the application of urban regeneration facilities such as green roof or permeable pavement can help in knowledge of flooding phenomena. In particular, findings from Garofalo et al. [25] showed how DRTC algorithm proposed was able to balance the hydraulic capacity of the conduits within the system by utilizing the storage capacity of the less overwhelmed conduits during intense rainfall events. In other words, the DRTC algorithm was able to control the water level within the UDS successfully, ensuring a full utilization of the actual storage capacity of the system. The findings clearly demonstrated that the DRTC produced beneficial effects on the management of the UDS by substantially mitigating the risk of flooding and CSO. Results from Brunetti et al. [8, 9] showed that the implementation of a model aimed at soil systems, together with accurate experimental and numerical procedures, has been able to accurately describe the hydraulic behaviour of systems of multiple layered materials that are not really soils. Future perspectives are oriented in the smart optimization of LID and RWH systems by the IoT advanced innovations in order to maximize the hydraulic efficiency of these techniques and mitigate the urban flooding risk.
References
S. Achleitner, M. Möderl, W. Rauch, CITY DRAIN ©—an open source approach for simulation of integrated urban drainage systems. Environ. Model. Softw. 22, 1184–1195 (2007). https://doi.org/10.1016/j.envsoft.2006.06.013
R.G. Allen, L.S. Pereira, D. Raes, M. Smith, FAO Irrigation and Drainage Paper No. 56: Crop Evapotranspiration, FAO. Rome (1998)
G.E.B. Archer, A. Saltelli, I.M. Sobol, Sensitivity measures, ANOVA-like techniques and the use of bootstrap. J. Stat. Comput. Simul. 58, 99–120 (1997). https://doi.org/10.1080/00949659708811825
K. Astrom, PID controllers: theory, design and tuning. Instrum. Soc. Am. (1995). ISBN 1556175167
P.M. Bach, W. Rauch, P.S. Mikkelsen, D.T. McCarthy, A. Deletic, A critical review of integrated urban water modelling—urban drainage and beyond. Environ. Model. Softw. (2014). https://doi.org/10.1016/j.envsoft.2013.12.018
G. Barenblatt, I. Zheltov, I. Kochina, Basic concepts in the theory of seepage of homogeneous liquids in fissured rocks [strata]. J. Appl. Math. Mech. 24, 1286–1303 (1960). https://doi.org/10.1016/0021-8928(60)90107-6
T. Beeneken, V. Erbe, A. Messmer, C. Reder, R. Rohlfing, M. Scheer, M. Schuetze, B. Schumacher, M. Weilandt, M. Weyand, Real time control (RTC) of urban drainage systems—a discussion of the additional efforts compared to conventionally operated systems. Urban Water J. 10, 293–299 (2013). https://doi.org/10.1080/1573062X.2013.790980
G. Brunetti, J. Simunek, P. Piro, A comprehensive analysis of the variably-saturated hydraulic behavior of a green roof in a mediterranean climate. Vadose Zo. J. 15 (in press) (2016a). https://doi.org/10.2136/vzj2016.04.0032
G. Brunetti, J. Šimůnek, P. Piro, A comprehensive numerical analysis of the hydraulic behavior of a permeable pavement. J. Hydrol. 540, 1146–1161 (2016). https://doi.org/10.1016/j.jhydrol.2016.07.030
G. Brunetti, J. Šimůnek, M. Turco, P. Piro, On the use of surrogate-based modeling for the numerical analysis of low impact development techniques. J. Hydrol. 548, 263–277 (2017). https://doi.org/10.1016/j.jhydrol.2017.03.013
M. Carbone, F. Principato, G. Garofalo, P. Piro, Comparison of evapotranspiration computation by FAO-56 and Hargreaves methods. J. Irrig. Drain. Eng. 142(8), 06016007 (2016). https://doi.org/10.1061/(ASCE)IR.1943-4774.0001032
M. Carbone, G. Brunetti, P. Piro, Modelling the hydraulic behaviour of growing media with the explicit finite volume solution. Water (Switzerland) 7, 568–591 (2015). https://doi.org/10.3390/w7020568
M. Carbone, M. Turco, G. Brunetti, P. Piro, A cumulative rainfall function for subhourly design storm in mediterranean urban areas. Adv. Meteorol. 2015, 1–10 (2015). https://doi.org/10.1155/2015/528564
M. Carbone, M. Turco, G. Nigro, P. Piro, Modeling of hydraulic behaviour of green roof in catchment scale, in 14th SGEM GeoConference on Water Resources. Forest, Marine and Ocean Ecosystems (2014a), pp. 471–478. https://doi.org/10.5593/sgem2014/b31/s12.061
M. Carbone, F. Principato, G. Nigro, P. Piro, Proposal of a conceptual model as tool for the hydraulic design of vegetated roof, in Applied Mechanics and Materials, vol. 641 (Trans Tech Publications, 2014b), pp. 326–331. https://doi.org/10.4028/www.scientific.net/AMM.641-642.326
M. Carbone, G. Garofalo, P. Piro, Decentralized real time control in combined sewer system by using smart objects. Procedia Eng. 473–478 (2014c). https://doi.org/10.1016/j.proeng.2014.11.237
M. Carini, M. Maiolo, D. Pantusa, F. Chiaravalloti, G. Capano, Modelling and optimization of least-cost water distribution networks with multiple supply sources and user. Ricerche Mat. 2017 (2017). https://doi.org/10.1007/s11587-017-0343-y
B. Cheviron, Y. Coquet, Sensitivity analysis of transient-MIM HYDRUS-1D: case study related to pesticide fate in soils. Vadose Zo. J. 8, 1064 (2009). https://doi.org/10.2136/vzj2009.0023
G. Dirckx, M. Schütze, S. Kroll, C. Thoeye, G. De Gueldre, B. Van De Steene, Cost-efficiency of RTC for CSO impact mitigation. Urban Water J. 8, 367–377 (2011). https://doi.org/10.1080/1573062X.2011.630092
W. Durner, Hydraulic conductivity estimation for soils with heterogeneous pore structure. Water Resour. Res. 30, 211–223 (1994). https://doi.org/10.1029/93WR02676
B. Efron, R. Tibshirani, Bootstrap methods for standard errors, confidence intervals, and other measures of statistical accuracy. Stat. Sci. 1, 54–75 (1986)
A.H. Elliott, S.A. Trowsdale, A review of models for low impact urban stormwater drainage. Environ. Model. & Softw. 22, 394–405 (2007). https://doi.org/10.1016/j.envsoft.2005.12.005
G. Fu, D. Butler, S.-T. Khu, Multiple objective optimal control of integrated urban wastewater systems. Environ. Model Softw. 23, 225–234 (2008). https://doi.org/10.1016/j.envsoft.2007.06.003
A. Giordano, G. Spezzano, A. Vinci, G. Garofalo, P. Piro, A cyber-physical system for distributed real-time control of urban drainage networks in smart cities, in International Conference on Internet and Distributed Computing Systems (Springer, Cham, 2014), pp. 87–98. https://doi.org/10.1007/978-3-319-11692-1_8
G. Garofalo, A. Giordano, P. Piro, G. Spezzano, A. Vinci, A distributed real-time approach for mitigating CSO and flooding in urban drainage systems. J. Netw. Comput. Appl. 78, 30–42 (2017). https://doi.org/10.1016/j.jnca.2016.11.004
G. Garofalo, S. Palermo, F. Principato, T. Theodosiou, P. Piro, The influence of hydrologic parameters on the hydraulic efficiency of an extensive green roof in mediterranean area. Water 8(2), 44 (2016). https://doi.org/10.3390/w8020044
M.K. Gill, Y.H. Kaheil, A. Khalil, M. McKee, L. Bastidas, Multiobjective particle swarm optimization for parameter estimation in hydrology. Water Resour. Res. 42, n/a–n/a (2006). https://doi.org/10.1029/2005wr004528
T. Houska, S. Multsch, P. Kraft, H.-G. Frede, L. Breuer, Monte Carlo based calibration and uncertainty analysis of a coupled plant growth and hydrological model. Biogeosci. Discuss. 10, 19509–19540 (2013). https://doi.org/10.5194/bgd-10-19509-2013
J. Huang, J. He, C. Valeo, A. Chu, Temporal evolution modeling of hydraulic and water quality performance of permeable pavements. J. Hydrol. 533, 15–27 (2016). https://doi.org/10.1016/j.jhydrol.2015.11.042
M. Jelasity, A. Montresor, O. Babaoglu, Gossip-based aggregation in large dynamic networks. ACM Trans. Comput. Syst. 23, 219–252 (2005). https://doi.org/10.1145/1082469.1082470
Y. Jiang, C. Liu, C. Huang, X. Wu, Improved particle swarm algorithm for hydrological parameter optimization. Appl. Math. Comput. 217, 3207–3215 (2010). https://doi.org/10.1016/j.amc.2010.08.053
M. Kamali, M. Delkash, M. Tajrishy, Evaluation of permeable pavement responses to urban surface runoff. J. Environ. Manag. 187, 43–53 (2017). https://doi.org/10.1016/j.jenvman.2016.11.027
J. Kennedy, R. Eberhart, Particle swarm optimization. Eng. Technol. 1942–1948 (1995)
Z.W. Kundzewicz, M. Radziejewski, I. Pińskwar, Precipitation extremes in the changing climate of Europe. Clim. Res. 31, 51–58 (2006). https://doi.org/10.3354/cr031051
R. Levinson, H. Akbari, Effects of composition and exposure on the solar reflectance of portland cement concrete. Cem. Concr. Res. 32, 1679–1698 (2002). https://doi.org/10.1016/S0008-8846(02)00835-9
Y. Li, R.W. Babcock, Green roof hydrologic performance and modeling: A review (Technol, Water Sci, 2014). https://doi.org/10.2166/wst.2013.770
M. Maiolo, D. Pantusa, An optimization procedure for the sustainable management of water resources. Water Sci. Technol.: Water Supply 16(1), 61–69 (2016). https://doi.org/10.2166/ws.2015.114
S.K. Min, X. Zhang, F.W. Zwiers, G.C. Hegerl, Human contribution to more-intense precipitation extremes. Nature 470, 378–381 (2011). https://doi.org/10.1038/nature09763
D.N. Moriasi, J.G. Arnold, M.W. Van Liew, R.L. Binger, R.D. Harmel, T.L. Veith, Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 50, 885–900 (2007). https://doi.org/10.13031/2013.23153
J.E. Nash, J.V. Sutcliffe, River flow forecasting through conceptual models Part I—A discussion of principles. J. Hydrol. 10, 282–290 (1970). https://doi.org/10.1016/0022-1694(70)90255-6
T. Pertassek, A. Peters, W. Durner, HYPROP-FIT Software User’s Manual, V.3.0 (2015)
P. Piro, M. Carbone, A modelling approach to assessing variations of total suspended solids (TSS) mass fluxes during storm events. Hydrol. Process. 28, 2419–2426 (2014). https://doi.org/10.1002/hyp.9809
P. Piro, M. Carbone, G. Garofalo, Distributed vs. concentrated storage options for controlling CSO volumes and pollutant loads. Water Pract. Technol. 5, wpt2010071–wpt2010071 (2010a). https://doi.org/10.2166/wpt.2010.071
P. Piro, M. Carbone, G. Garofalo, J. Sansalone, Size distribution of wet weather and dry weather particulate matter entrained in combined flows from an urbanizing sewershed. Water Air Soil Pollut. 206, 83–94 (2010). https://doi.org/10.1007/s11270-009-0088-7
M. Pleau, H. Colas, P. Lavallée, G. Pelletier, R. Bonin, Global optimal real-time control of the Quebec urban drainage system. Environ. Model. Softw. (2005). https://doi.org/10.1016/j.envsoft.2004.02.009
F. Principato, S.A. Palermo, G. Nigro, G. Garofalo, Sustainable strategies and RTC to mitigate CSO’s impact: different scenarios in the highly urbanized catchment of Cosenza, Italy, in Proceedings of the 14th IWA/IAHR International Conference on Urban Drainage, ICUD2017, Prague, CZ, 10–15 Sept 2017, Oral Presentation, pp. 587–589
A. Raimondi, G. Becciu, On pre-filling probability of flood control detention facilities. Urban Water J. 12, 344–351 (2015). https://doi.org/10.1080/1573062X.2014.901398
A. Raimondi, G. Becciu, Probabilistic modeling of rainwater tanks. Procedia Eng. 89, 1493–1499 (2014). https://doi.org/10.1016/j.proeng.2014.11.437
M. Rezaei, P. Seuntjens, I. Joris, W. Boënne, S. Van Hoey, P. Campling, W.M. Cornelis, Sensitivity of water stress in a two-layered sandy grassland soil to variations in groundwater depth and soil hydraulic parameters. Hydrol. Earth Syst. Sci. Discuss. 12, 6881–6920 (2015). https://doi.org/10.5194/hessd-12-6881-2015
L.A. Rossman, Storm water management model quality assurance report: dynamic wave flow routing. Storm Water Manag. Model Qual. Assur. Rep. 1–115 (2006)
A. Saltelli,, S. Tarantola, M. Saisana, M. Nardo, What is sensitivity analysis?, in II Convegno Della Rete Dei Nuclei Di Valutazione E Verifica, Napoli 26, 27 Gennaio 2005, Centro Congressi Universitá Federico II, Via Partenope 36 (2005)
M. Schütze, A. Campisano, H. Colas, W. Schilling, P.A. Vanrolleghem, Real time control of urban wastewater systems—where do we stand today? J. Hydrol. 299, 335–348 (2004). https://doi.org/10.1016/j.jhydrol.2004.08.010
N. She, J. Pang, Physically based green roof model. J. Hydrol. Eng. 15, 458–464 (2010). https://doi.org/10.1061/(ASCE)HE.1943-5584.0000138
J. Šimůnek, M.T. van Genuchten, M. Šejna, Recent developments and applications of the HYDRUS Computer Software Pac. Vadose Zo. J. 15, 25 (2016). https://doi.org/10.2136/vzj2016.04.0033
J. Simunek, N.J. Jarvis, M.T. van Genuchten, A. Gardenas, Review and comparison of models for describing non-equilibrium and preferential flow and transport in the vadose zone. J. Hydrol. 272, 14–35 (2003). https://doi.org/10.1016/S0022-1694(02)00252-4
J. Šimůnek, M.T. van Genuchten, Modeling nonequilibrium flow and transport processes using HYDRUS. Vadose Zo. J. 7, 782 (2008). https://doi.org/10.2136/vzj2007.0074
J. Šimůnek, M.T. van Genuchten, M. Šejna, Development and applications of the HYDRUS and STANMOD software packages and related codes. Vadose Zo. J. 7, 587 (2008). https://doi.org/10.2136/vzj2007.0077
I. Sobol’, Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math. Comput. Simul. 55, 271–280 (2001). https://doi.org/10.1016/S0378-4754(00)00270-6
M. Turco, R. Kodešová, G. Brunetti, A. Nikodem, M. Fér, P. Piro, Unsaturated hydraulic behaviour of a permeable pavement: laboratory investigation and numerical analysis by using the HYDRUS-2D model. J. Hydrol. 554, 780–791 (2017). https://doi.org/10.1016/j.jhydrol.2017.10.005
UMS GmbH, UMS (2015): Manual HYPROP, Version 2015-01 (2015)
W. Usher, Xantares, D. Hadka, bernardoct, Fernando, J. Herman, C. Mutel, SALib: New documentation, doc strings and installation requirements (2015). https://doi.org/10.5281/zenodo.31316
M.T. van Genuchten, A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 44, 892 (1980). https://doi.org/10.2136/sssaj1980.03615995004400050002x
M.T. Van Genuchten, P.J. Wierenga, Mass transfer studies in sorbing porous media I. Analytical solutions. Soil Sci. Soc. Am. J. 40, 473–480 (1976). https://doi.org/10.2136/sssaj1976.03615995004000040011x
J.E. Warren, P.J. Root, The behavior of naturally fractured reservoirs. Soc. Pet. Eng. J. 3, 245–255 (1963). https://doi.org/10.2118/426-PA
T.H.F. Wong, T.D. Fletcher, H.P. Duncan, G.A. Jenkins, Modelling urban stormwater treatment—a unified approach. Ecol. Eng. 27, 58–70 (2006). https://doi.org/10.1016/j.ecoleng.2005.10.014
M. Wooldridge, An Introduction to MultiAgent Systems, 2nd edn. (Wiley, 2009), ISBN-10 0470519460, ISBN-13 978-0470519462
M. Zambrano-Bigiarini, R. Rojas, A model-independent Particle Swarm Optimisation software for model calibration. Environ. Model Softw. 43, 5–25 (2013). https://doi.org/10.1016/j.envsoft.2013.01.004
S. Zhang, Y. Guo, Analytical probabilistic model for evaluating the hydrologic performance of green roofs. J. Hydrol. Eng. 18, 19–28 (2013). https://doi.org/10.1061/(ASCE)HE.1943-5584.0000593
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Piro, P., Turco, M., Palermo, S.A., Principato, F., Brunetti, G. (2019). A Comprehensive Approach to Stormwater Management Problems in the Next Generation Drainage Networks. In: Cicirelli, F., Guerrieri, A., Mastroianni, C., Spezzano, G., Vinci, A. (eds) The Internet of Things for Smart Urban Ecosystems. Internet of Things. Springer, Cham. https://doi.org/10.1007/978-3-319-96550-5_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-96550-5_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-96549-9
Online ISBN: 978-3-319-96550-5
eBook Packages: EngineeringEngineering (R0)