
Abstract
This paper presents the kinematics of modular a parallel robot for post-stroke rehabilitation of elbow and wrist. The targeted motions for rehabilitation are: elbow flexion, pronation/supination, flexion/extension and adduction/abduction (radial/ulnar deviation) of the wrist. The kinematic structure of the robotic system is presented starting from general considerations concerning the rehabilitation protocol of the upper limb. Its kinematics is developed and simulation results are presented for a proposed training exercise.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Stroke is one of the most encountered causes of death and a main cause of chronic disability in the world [9]. Although current possibilities in the stroke treatment and prevention have reduced its impact, the ageing population phenomenon, especially in Europe will increase the incidence rate of stroke and cardiovascular diseases [18]. On the other hand, mortality rate from strokes has declined over time [12], resulting in an increased worldwide prevalence of stroke. Romania has proved to be a leading country in Europe concerning the cardiovascular diseases and especially stroke related disabilities [7]. Great advances have been achieved in the management of acute phase of post-stroke survivors, but even so the care of these patients still relies on the rehabilitation treatments. Robotic-assisted rehabilitation has proved to accelerate the recovery of lost motor functions for post-stroke survivors, enabling clinics to switch from the classical intensive-oriented training to higher repetitive technological treatment [4].
Huge effort has been made by private companies, research centers and universities to provide suitable robotic solutions for rehabilitation [13]. The developed robotic systems could be classified according the targeted are for rehabilitation (i.e. lower limb, upper limb) or by their architecture: end-effector based or exoskeletons. The first category of rehabilitation robots use a classic serial or parallel architecture in which the targeted limb is mobilized using the robot end-effector, especially designed to hold the patient’s limb using a pre-determined anchor point: [3, 6, 8, 17]. Compared to end-effector robotic systems, exoskeletons provide certain advantages like: the workspace similarity in form and size, lack of singularities or the precise mapping of the joint forces [15]. The main disadvantages of exoskeletons rely in the impossibility to replicate the human kinematics because of its diversity and in their innate more complicated design. Achievements are numerous and prove that such architectures can be successfully used for training: [1, 2, 10]. Most exoskeletons have a serial architecture, since their design requires a wrapping of the human limb. Parallel structures have proven their advantages compared to serial ones, especially in terms of stiffness and dynamic performances. In [5] the authors proposed a serial-parallel exoskeleton for the rehabilitation of the upper limb. It has a high stiffness, very accurate, but has also a complicated structure, using differential mechanism of bevel gear transmission and lacks the abduction/adduction of the wrist. In [11] the authors developed a 5 DOF shoulder exoskeleton in a modular design: the first module with 3 DOF (a spherical parallel manipulator) has an active function and the second module with 2 DOF acting as a passive slip interface designed to increase the system’s mobility and to prevent joint misalignment. The robotic system is designed to train only the shoulder.
The current paper presents a modular exoskeleton robotic system, with a parallel architecture, for the training and rehabilitation of elbow and wrist, specifically the following motions: elbow flexion/extension, pronation/supination and the wrist flexion/extension and adduction/abduction. Section 2 presents the kinematics and Sect. 3 a set of training-based simulations.
2 A Parallel Modular Robot for Elbow and Wrist Rehabilitation
The authors have proposed and discussed in [14] the main requirements for a rehabilitation robotic system in terms of motion analysis including anchoring (active/passive), range and actuation force. The PaRReEx robotic system consists of two independent parallel modules, one for elbow rehabilitation (PaRReEx—elbow, see Fig. 1) and the other for wrist rehabilitation (PaRReEx—wrist, see Fig. 2) [16]. The PaRReEx—elbow achieves the pronation/supination motions, while the PaRReEx—wrist achieves the wrist flexion/extension and adduction/abduction.

The PaRReEx—elbow module of the parallel robot for elbow flexion/extension and pronation/supination rehabilitation

The PaRReEx—wrist module of the parallel robot for wrist flexion/extension and adduction/abduction rehabilitation
The PaRReEx—elbow module has 2 DOF: two rotations, one around the OY axis (achieved by the \( {\text{q}}_{1} \) active joint) and the other around OX axis (achieved by the \( {\text{q}}_{2} \) active joint). \( {\text{q}}_{1} \) achieves the elbow flexion/extension while \( {\text{q}}_{2} \) achieves the pronation/supination motion, using a bevel gear mechanism. The fixed coordinate system is placed in the \( {\text{R}}_{1} \) rotation joint, the geometrical parameters being: \( {\text{l}}_{1} \) (the length of the mechanism on the OX axis) and \( {\text{l}}_{2} \) (distance from the \( {\text{R}}_{1} \) joint to the hand axis).
The PaRReEx—wrist module has 2 DOF: two rotations, one around the OZ axis (using the \( {\text{q}}_{3} \) active joint), which achieves the wrist flexion/extension and the other around the OY axis (using \( {\text{q}}_{4} \) active joint), which achieves the adduction/abduction motion. The fixed coordinate system is placed in the \( {\text{R}}_{2} \) active rotation joint, the geometrical parameters being: \( {\text{r}}_{1} \), as the distance between the patient’s wrist joint and the hand-holder (this being a human parameter used as input data into the kinematic model of the robot), \( {\text{r}}_{2} \) as the height of the hand-holder and d as the distance between the patient’s wrist joint and the \( {\text{R}}_{2} \) robot joint.
2.1 Kinematics
The forward kinematics of the PaRReEx modules requires as input data the values of the active joints \( {\text{q}}_{ 1} , {\text{q}}_{ 2} , {\text{q}}_{ 3} , {\text{q}}_{ 4} \) and the geometrical parameters \( \left( {{\text{l}}_{ 1} ,\,{\text{l}}_{ 2} ,\,{\text{r}}_{ 1} ,\,{\text{r}}_{ 2} ,\,{\text{d}}} \right) \) while the target is to determine the end-effector coordinates \( {\text{E}}_{ 1} \left( {{\text{X}}_{\text{E1}} , {\text{Y}}_{\text{E1}} , {\text{Z}}_{\text{E1}} } \right) \) and orientation \( \uppsi_{ 1} ,\uptheta_{ 1} ,\varphi_{ 1} \)—for the elbow and \( {\text{E}}_{ 2} \left( {{\text{X}}_{\text{E2}} , {\text{Y}}_{\text{E2}} , {\text{Z}}_{\text{E2}} } \right),\,\uppsi_{ 2} ,\uptheta_{ 2} ,\varphi_{ 2} \)—for the wrist. Relations (1) to (4) show the closed-form kinematic equations of the forward kinematics.
and:
In the case of PaRReEx—wrist, because of the d geometric parameter, the term \( {\text{r}}_{1} - {\text{d}}\sin \left( {{\text{q}}_{4} } \right) \) has been used as a displacement on the OX axis. Figure 3 explains how it has been obtained.

A detail of the PaRReEx—wrist
The inverse kinematics requires as input data the hand orientation (the angles \( \uppsi_{1} ,\uptheta_{1} ,{\upvarphi }_{1} \)) to determine the active joints coordinates: \( {\text{q}}_{1} \) and \( {\text{q}}_{2} \) of the PaRReEx—elbow:
The same for the PaRReEx—wrist, where the solution of the inverse kinematics is trivial.
3 Training-Based Simulations of the PaRReEx Robotic System
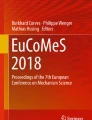
A simulation exercise has been programmed using MATLAB as a proposal for the wrist rehabilitation, using the PaRReEx—wrist module. The two motions (wrist flexion/extension and adduction/abduction) are performed independently, to avoid any interference, but if necessary these could be performed also together. The current formulation of kinematic analysis, used also in this simulation, can be used for optimal design procedures and exploitation to characterize the feasibility of the proposed robotic design. The \( {\text{q}}_{3} \) active joint (which performs the flexion/extension) ranges between: 0°: −45°:0°: +45°:0°, while \( {\text{q}}_{4} \) (which performs the adduction/abduction) ranges between: 0°: −30°:0°: +30°:0°. The motion parameters, chosen based on [14] can be assumed as: \( v_{\hbox{max} } = 6.5^\circ /{\text{s}} \) and \( \upvarepsilon_{\hbox{max} } = 10^\circ /{\text{s}}^{ 2} \). Figure 4 shows the simulation, as the computed joints motions (acting as input data) and Fig. 5 the simulation results, namely the end-effector orientation time history diagram (namely the angles \( \uppsi \) and \( \uptheta \)).

Computed joint motions of PaRReEx—wrist for wrist flexion/extension and adduction/abduction motion: positions, velocities and accelerations of the active joints

The time history diagrams of the end-effector (orientation \( \uppsi \) and \( \uptheta \)) velocities and accelerations for a simulated rehabilitation exercise
4 Conclusions
The paper presents the kinematics of a parallel modular robotic system designed for rehabilitation purposes of the upper limb. The robotic system targets the flexion/extension and the pronation/supination motions, using the PaRReEx—elbow parallel robotic module and the flexion/extension and adduction/abduction motions using the PaRReEx—elbow parallel robotic module. This proves that the proposed kinematics is suitable to perform all the motions of the upper limb starting from the elbow up to the wrist (excluding the shoulder), which is something that other systems have not entirely covered. The achieved simulations present a possible training exercise motion for a range of 90° for flexion/extension and 60° for the adduction/abduction, proving that the designed robotic system is suitable for the targeted task and the kinematics can be easily implemented into the robot control.
References
Allington J, Spencer SJ, Klein J, Buell M, Reinkensmeyer DJ, Bobrow J (2011) Supinator extender (SUE): a pneumatically actuated robot for forearm/wrist rehabilitation after stroke. In: Proceedings of the Conference on IEEE Engineering in Medicine and Biology Society, pp 1579–1582
Carbone G et al (2017) A study of feasibility for a limb exercising device. Advances in Italian mechanism science. In: Proceedings of the first international conference of the IFToMM Italy, pp 11–21
Ceccarelli M (2004) Fundamentals of mechanics of robotic manipulation. Springer
Chan DYI, Chan CCH, Au DKS (2006) Motor relearning programme for stroke patients: a randomized controlled trial. Clin Rehabil 20(3):191–200
Chen Y, Li G, Zhu Y, Zhao J, Cai H (2014) Design of a 6-DOF upper limb rehabilitation exoskeleton with parallel actuated joints. Bio-Med Mater Eng 24:2527–2535
Colizzi L, Lidonnici A, Pignolo P (2012) Upper limb rehabilitation after stroke: ARAMIS a “robomechatronic” innovative approach and prototype. In: Proceedings of the 4th IEEE RAS & EMBS international conference on biomedical robotics and biomechatronics (BioRob), pp 1410–1414
Dorobantu M et al (2012) Profile of the Romanian hypertensive patient data from SEPHAR II study. Rom J Intern Med 50(4):285–296
Duret C, Courtial O, Grosmaire A, Hutin E (2015) Use of a robotic device for the rehabilitation severe upper limb paresis in subacute stroke: exploration of patient/robot interaction and the motor recovery process. BioMed Res Int, Article ID 482389
Go AS et al (2014) Heart disease and stroke statistics—2014 update: a report from the American Heart Association. Circulation 129(3):e28–e292
Ho NS et al (2011) An EMG-driven exoskeleton hand robotic training device on chronic stroke subjects: task training system for stroke rehabilitation. In: Proceedings of IEEE International Conference on Rehabilitation Robotics
Hunt J, Lee H, Artemiadis P (2016) A novel shoulder exoskeleton robot using parallel actuation and a passive slip interface. J Mech Robot 9(1)
Lackland DT et al (2014) Factors influencing the decline in stroke mortality. Stroke 45(1):315–353
Maciejasz P, Eschweiler J, Gerlach-Hahn K, Jansen-Troy A, Leonhardt S (2014) A survey on robotic devices for upper limb rehabilitation. J Neuroeng Rehabil 11(3) (2014)
Major KA, Major ZZ, Carbone G, Pîslă A, Vaida C, Gherman B, Pîslă D (2016) Ranges of motion as basis for robot-assisted post-stroke rehabilitation. Int J Bioflux Soc Hum Vet Med 8(4):192–196
Mihelj M, Nef T, Riener R (2007) Armin II—7 dof rehabilitation robot: mechanics and kinematics. In Proceedings of 2007 IEEE international conference on robotics and automation, pp 4120–4125
Plitea N et al (2017) Parallel robotic system for elbow and wrist rehabilitation. Patent pending
Tarnita D, Geonea I, Petcu A, Tarnita DN (2016) Experimental characterization of human walking on stairs applied to humanoid dynamics. In: Advances in robot design and intelligent control. Springer, pp 293–301
Veerbeek M et al (2014) What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS ONE 9(2)
Acknowledgements
The paper presents results from the research activities of the project ID 37_215, MySMIS code 103415 “Innovative approaches regarding the rehabilitation and assistive robotics for healthy ageing” co-financed by the European Regional Development Fund through the Competitiveness Operational Programme 2014–2020, Priority Axis 1, Action 1.1.4, through the financing contract 20/01.09.2016, between the Technical University of Cluj-Napoca and ANCSI as Intermediary Organism in the name and for the Ministry of European Funds.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Gherman, B., Carbone, G., Plitea, N., Ceccarelli, M., Banica, A., Pisla, D. (2018). Kinematic Design of a Parallel Robot for Elbow and Wrist Rehabilitation. In: Doroftei, I., Oprisan, C., Pisla, D., Lovasz, E. (eds) New Advances in Mechanism and Machine Science. Mechanisms and Machine Science, vol 57. Springer, Cham. https://doi.org/10.1007/978-3-319-79111-1_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-79111-1_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-79110-4
Online ISBN: 978-3-319-79111-1
eBook Packages: EngineeringEngineering (R0)