
Abstract
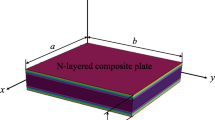
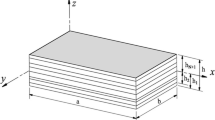
In this work, we present the behaviour of laminated composite plates, subjected to a static bending load under the influence of varying value of material length scale parameters . Reddy’s (J Appl Mech 51:745, 1984 [1]) third order shear deformation theory (TSDT) is used, which describes the kinematics accurately. The geometric nonlinearity, which prevails under the effect of large deformations, is accounted using von Karman nonlinear strains. Finite element model is developed using four-noded rectangular conforming element. Tangent stiffness matrix is derived to implement Newton Raphson method. The concept of non-locality is adopted from the works of Eringen and Edelen (Int J Eng Sci 10:233, 1972 [2]). Parametric study has been conducted to investigate the effect of non-locality and non-linearity on the behaviour of laminated composites.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others
1 Introduction
The classical continuum theories have been used for decades to solve different kinds of boundary value problems. This approach assumes the material is continuously distributed and homogeneous at macroscale. At smaller length scales, it is proven that the material possesses in homogeneities and is not continuously distributed. The experimental results also suggest that conventional continuum approach is in adequate to model the material at smaller length scale such as nanoscale. At nanoscale, the materials’ spatial dimensions are comparable to the internal characteristic lengths such as grain distance in which case the classical continuum analysis ceases to provide the accurate results. The other deficiencies of classical theory include negligence of microstructural size effect [3], mesh dependent results [4], singularity at crack tip [5]. Hence, the continuum descriptions must be enriched to obviate these discrepancies. The nonlocal approach is proven to overcome these discrepancies. The term nonlocal in nonlocal theories refers to the long range inter atomic that are taken into account in the constitutive relations. Eringen and Edelen [2] first gave the relationship between the local and nonlocal stress tensor through a Kernel function. This Kernel function depends on the internal and external characteristic lengths of the material. John et al. [6] first applied the nonlocal concept to structural mechanics applications. Jirásek et al. [7] explained how the classical theories can be enriched to deal with problems of size effects in microscale elasto-plasticity. Recently Reddy [8] gave the reformulated Euler-Bernouli, Timoshenko beam theories using nonlocal theories. Aydogdu [9] and Adhikari et al. [10] employed nonlocal models to investigate the small-scale effect on elastic rods.
Applications of laminated composite plates range from aerospace industry to sports industry. Accurate analysis is of paramount importance for effective utilizing the material strength and for the safe design. Since laminated composite plates possess low value of shear modulus, compared to Young’s modulus , shear deformations are going to play significant effect on their behavior. Hence the correct description of kinematics is necessary to predict the response of the composites accurately. Classical theory does not account for the shear deformations hence cannot be used to analyze thick plates. On the other hand, first order shear deformation theory (FSDT) [11] takes into account shear deformation in a simple way that it needs shear correction factor. Whereas Reddy’s TSDT [1] expands the displacement field up to third order, it gives the quadratic variation of transverse shear strains and shear stress. This kinematic description avoids the need for shear correction factor. Classical continuum theory takes into account exclusively the bulk, neglecting the contributions from the surface of the deformable body. However, surface effects predominantly affect the material behavior. Raghu et al. [12] presented the analytical solutions for laminated composite plates using nonlocal third-order shear deformation theory of Reddy considering surface stress effects. Preethi et al. [13] studied the effect of non-locality and non-linearity on the bending and free vibration behavior of rotating nanocantilever beams using finite element method. Mahmoud et al. [14] studied the effect of both non-locality and surface effects on the behavior of nanobeams using finite element method. Recently Barretta et al. [15] transfer the effect of non-locality on the viscoelastic functionally graded nanobeams, subjected to torsion. Ebrahimi et al. [16] used non-local strain gradient theory for the analysis of wave propagation in nanoplates.
2 Eringen’s Nonlocal Model
In non-local theory, the effect of neighborhood is taken into account via the constitutive relations. The stress at a reference point is functional of strain at all neighboring points. The non-local and local stress tensor are related by an attenuating Kernel function. Eringen proposed a constitutive model that expresses the nonlocal stress tensor σnl at point x as
where σ(x) is the classical macroscopic stress tensor at a point x and K(|x′ − x|, τ) is the Kernel function, which is normalized over the volume of the body represents the nonlocal modulus. |x′ − x| is the non-local distance and τ is the material constant that depends on the internal and external characteristic length.
As Hooke law, we have:
where ϵ is the strain tensor C is the fourth order elasticity tensor. Equations (23.1) and (23.2) together form the nonlocal constitutive equation for Hookean solid. Equation (23.1) can be represented equivalently in differential form as
where τ = (e0a)2/l2, e0 is a material constant and a and l are internal and external characteristic lengths, respectively. In general, ∇2 is the three dimensional Laplace operator. The nonlocal parameter μ can be taken as μ = τ2l2.
3 Third-Order Shear Deformation Theory
In the third-order shear deformation theory (TSDT) of Reddy [1] the assumptions of the straightness and normality of the transverse normal after deformation are relaxed by expressing the displacements as cubic functions of thickness coordinate. Consequently, the transverse shear strains and shear stresses vary quadratically through the thickness of the laminate and avoid the need for shear correction factor. Here the Reddy’s third-order theory is reformulated to account for the nonlocal effect. These nonlocal laminated plate theories allow for the small-scale effect, which becomes significant, when dealing with micro- and nano-plate like structures [8].
3.1 Displacement Field
The displacement field of Reddy’s third order theory [1] is developed in such a way that the in-plane displacements are expanded up to the third degree of the thickness coordinate. This definition results in quadratic variation of shear strains and hence the shear stress. The transverse displacement is independent of thickness coordinate because it is assumed a transverse normal is inextensible:
where u0, v0, w0 are the in-plane displacements of a point on the mid plane (i.e. z = 0); ϕx, ϕ y denote the rotations of the transverse normal line at mid plane (ϕ x = ∂u/∂z and ϕ y = ∂v/∂z). The total thickness of the laminate is given by h.
4 Equilibrium Equations
The non-local governing equations for TSDT can be derived, using the principle of virtual displacements and (3). They can be derived as follows:
where
5 Finite Element Model
The weak form for each governing equation can be derived and the finite element model is developed after substituting the displacement approximations in the weak form. The weak form suggests that the primary degree of freedom of Reddy’s TSDT should be \(u,v,w,\frac{\partial w}{\partial x},\frac{\partial w}{\partial y},\frac{{\partial^{2} w}}{\partial x\partial y},\phi_{x} ,\phi_{y}\). The approximations for each of the primary degrees of freedom are as follows:
The Δ here denotes (\(w,\frac{\partial w}{\partial x},\frac{\partial w}{\partial y},\frac{{\partial^{2} w}}{\partial x\partial y}\)) at each node of the finite element. Substitution of (23.14)–(23.18) in the weak forms of the governing equations will yield the discretized weak form as follows:
It is seen that (23.19) is non-linear in nature. To solve it, the Newton Raphson method is used. The tangent stiffness matrix can be derived using the below formula [17]:
6 Numerical Results
In this section, numerical examples are presented to investigate the effect of both nonlinearity and nonlocality on the behavior of laminated composite structure , subjected to transverse sinusoidal loading. The effect of a/h ratio and the integration rule is also presented. Different types of boundary conditions such as SS-1 and SS-2 are considered. A four-noded rectangular element is used in all examples. The tolerance value of error is fixed as 10−3. The deflection is calculated at the center of the plate and non-dimensionalized as follows:
Here q0 is the intensity of transverse load and a, b, h are the length, width and thickness of the plate respectively. The following material properties typical of graphite epoxy composite laminate are used in all examples:
6.1 Boundary Conditions
Two kinds of boundary conditions are considered for the analysis, namely SS-1 (simply supported-1) and SS-2. Figures 23.1 and 23.2 show the SS-1 and SS-2 boundary conditions, respectively.

SS-1 boundary conditions

SS-2 boundary conditions
6.2 Example 1
A four-layered plate of the orientation (0/90/0/90) with each layer having equal thickness is considered in this example. Both SS-1 and SS-2 boundary conditions are considered. The intensity of the sinusoidal load is considered as one.
Tables 23.1 and 23.2 show the non-dimensionalised deflection values with increasing values of nonlocal parameter for SS-2 and SS-1 boundary conditions. respectively. It has been clearly observed that the deflection value increases as the value of μ increases. It can also be observed that the effect of integration rule has very less effect on the value of the deflection. Therefore, there is no shear locking. As the value of a/h increases, the deflection decreases for the same value of μ.
6.3 Example 2
In this example, a two-layered plate of the orientation (45/−45) with each layer having equal thickness is considered in this example. SS-2 boundary conditions are considered. The intensity of the sinusoidal load is considered as one.
Table 23.3 shows the value of deflection with increasing load and increasing value of nonlocal parameter. As expected, the values of deflections both in the nonlinear and linear cases are closer in the initial ranges of load values. Again, it is observed that the deflection value increases as the value of μ increases for the given value of load.
7 Conclusions
The finite element formulation for the analysis of laminated composite plates is developed and implemented by using the third-order shear deformation theory and Eringen’s nonlocality. It has been observed that the nonlocality and geometric nonlinearity have significant effect on the behavior of laminated composite plates.
References
J.N. Reddy, J. Appl. Mech. 51, 745 (1984)
A.C. Eringen, D.G.B. Edelen, Int. J. Eng. Sci. 10, 233 (1972)
Z.P. Bažant, M.D. Isaac, L. Zhengzhi, Trans. ASME 118, 317 (1996)
Z.P. Bažant, J. Milan, Am. Soc. Civil Eng. 128, 11 (2002)
Z. Zhen-Gong, H. Jie-Cai, D. Shan-Yi, Int. J. Solids Struct. 36, 3891 (1999)
P. John, R.B. George, P.M. Richard, Int. J. Eng. Sci. 128, 305 (2003)
M. Jirásek, Acta Polytech. 44, 16 (2004)
J.N. Reddy, Int. J. Eng. Sci. 45, 288 (2007)
M. Aydogdu, Phys. E 41, 861 (2009)
S. Adhikari, T. Murmu, M.A. McCarthy, Phys. E 59, 33 (2014)
R.D. Mindlin, ASME J. Appl. Mech. 18, 31 (1951)
P. Raghu, K. Preethi, A. Rajagopal, J.N. Reddy, Compos. Struct. 139, 13 (2016)
K. Preethi, P. Raghu, A. Rajagopal, J. N. Reddy, Mech. Adv. Mater. Struct. 1 (2017)
F. Mahmoud, M.A. Eltaher, A.E. Alshorbagy, E.I. Meletis, J. Mech. Sci. Technol. 26, 3555 (2012)
R. Barretta, L. Feo, R. Luciano, Compos. B Eng. 72, 217 (2015)
F. Ebrahimi, M.R. Barati, A. Dabbagh, Int. J. Eng. Sci. 107, 169 (2016)
J.N. Reddy, An Introduction to Nonlinear Finite Element Analysis (Oxford University Press, Oxford, 2015)
Acknowledgements
The authors would like to acknowledge the financial support of Indian-Russian Collaborative project grant from DST—RFBR (DST/INT/RFBR/IDIR/P-11/2016 and RFBR 16-58-48009 IND_omi).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Raghu, P., Nasedkina, A.A., Nasedkin, A.V., Rajagopal, A., Saswata, B. (2018). Nonlocal Nonlinear Analysis of Composites. In: Parinov, I., Chang, SH., Gupta, V. (eds) Advanced Materials . PHENMA 2017. Springer Proceedings in Physics, vol 207. Springer, Cham. https://doi.org/10.1007/978-3-319-78919-4_23
Download citation
DOI: https://doi.org/10.1007/978-3-319-78919-4_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-78918-7
Online ISBN: 978-3-319-78919-4
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)