
Abstract
This introductory chapter intends to present the required notions, definitions, and background in order to aid understanding the problem of fault diagnosis of hybrid dynamic and complex systems. It starts by defining the hybrid dynamic systems and presenting its main classes and modeling tools. Then, it presents the problem of diagnosis of faults in hybrid dynamic systems, its challenges, and a general classification of its main approaches. Finally, this chapter ends by a compact summary of the contents of the book by providing a paragraph about each of the single contribution (method used, faults diagnosed, class of hybrid dynamic systems adopted, modeling tool used, and applications targeted).
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Hybrid Dynamical Systems (HDS)
- Hybrid Bond Graph (HBGs)
- Multiple Discrete Modes
- Hybrid Petri Nets (HPN)
- Proposed Diagnosis Scheme
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1.1 Hybrid Dynamic Systems: Definition, Classes, and Modeling Tools
Most of the real systems, e.g., vehicles, planes, power electronic devices, manufacturing systems, are hybrid dynamic systems (HDS) [1] in which the discrete and continuous dynamics cohabit. The discrete dynamics is described by discrete state variables while the continuous dynamics is described by continuous state variables. HDS exhibit different continuous dynamic behavior depending on the current operation mode q as follows:
where X is the state vector and u is the input vector. In the case of linear systems, A (q) and B (q) are constant matrices of appropriate dimensions.
There are different classes of HDS, e.g., autonomous switching systems [2], discretely controlled switching systems [1], pricewise affine systems [3], discretely controlled jumping systems [4]. Many complex systems are embedded in the sense that they consist of a physical plant with a discrete controller. Therefore, the system has several discrete changes between different configuration modes through the actions of the controller exercised on the system plant (e.g., actuators). This kind of HDS is called discretely controlled continuous or switching systems (DCCS) [4]. Piecewise affine systems [3] are another important class of HDS where complex nonlinearities are substituted by a sequence of simpler piecewise linear behaviors.
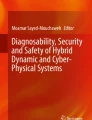
The three-cellular power converters [5], depicted in Fig. 1.1, present an example of DCCS. The continuous dynamics of the system is described by state vector X = [Vc 1 Vc 2 I]T, where Vc 1 and Vc 2 represent, respectively, the floating voltage of capacitors C 1 and C 2 and I represents the load current flowing from source E towards the load (R, L) through three elementary switching cells S j , j ∈ {1, 2, 3}. The latter represent the system discrete dynamics. Each discrete switch S j has two discrete states: S j opened or S j closed. The control of this system has two main tasks: (1) balancing the voltages between the switches and (2) regulating the load current to a desired value. To accomplish that, the controller changes the switches’ states from opened to closed or from closed to opened by applying discrete commands “CS j ” or “OS j ” to each discrete switch S j , j ∈ {1, 2, 3} (see Fig. 1.1) where CS j refers to “close switch S j ” and OS j to “open switch S j .” Thus, the considered example is a DCCS.

Three-cell power converter as discretely controlled continuous system (DCCS) where capacitors C 1 and C 2 represent the continuous components (Cc) and switches S 1, S 2, and S 3 the discrete components (Dc)
There are three major modeling tools widely used in the literature to model HDS. These tools are hybrid Petri nets [6], hybrid bond graphs [7], and hybrid automata[8].
Hybrid Petri nets (HPN) model HDS by combining discrete and continuous parts. HPN is formally defined by the tuple:
where P = P d ∪ P c is a finite, not empty, set of places partitioned into a set of discrete places P d , represented as circles, and a set of continuous places P c , represented as double circles. T = T d ∪ T c is a finite, not empty, set of discrete transitions T d and a set of continuous transitions T c represented as double boxes. h : P ∩ T → {D, C}, called “hybrid function,” indicates for every node whether it is a discrete node (D) or a continuous node (C). Pre : P c xT → ℝ+ or Pre : P d xT → ℕ is a function that defines an arc from a place to a transition. Post : P i xT j → ℝ+ or Post : P d xT → ℕ is a function that defines an arc from a transition to a place.
Hybrid bond graph is a graphical description of physical dynamic systems with discontinuities. The latter represent the transitions between discrete modes. Similar to a regular bond graph, it is an energy-based technique. It is directed graphs defined by a set of summits and a set of edges. Summits represent components. The latter are: (1) passive components which transform energy into potential energy (C-components), inertia energy (L-components), and dissipated energy (T-components), (2) active components that can be source of effort or source pf flow. The edges, called bonds (drawn as half arrows), represent ideal energy connections between the components. The components interconnected by the edges construct the model of the global system. This model is represented by 1 junction for components having a common flow, 0 junction for common effort and transformers and gyrators to connect different kinds of energy. In order to take into account the information during the transitions between discrete modes, hybrid bond graph is extended by adding controlled junctions (CJs). The latter allow considering the local changes in individual component modes due to discrete transitions. The CJs may be switched ON (activated) or OFF (deactivated). An activated CJ behaves like a conventional bond graph junction. Deactivated CJs turn inactive the entire incident junction and hence do not influence any part of the system.
Hybrid automata are a mathematical model for HDS, which combines, in a single formalism, transitions for capturing discrete change with differential equations for capturing continuous dynamics. A hybrid automaton is a finite state machine with a finite set of continuous variables whose values are described by a set of ordinary differential equations. A hybrid automaton is defined by the tuple:
where: Q is the set of states, Σ is the set of discrete events, X is a finite set of continuous variables describing the continuous dynamics of the system, flux : Q × X → ℝn is a function characterizing the continuous dynamics of X in each state q of Q, Init = (q ∈ Q, X(q), flux(q)) is the set of initial conditions and δ : Q × Σ → Q is the state transition function. A transition δ(q, e) = q + corresponds to a change from state q to state q + after the occurrence of discrete event e ∈ Σ.
1.2 Fault Diagnosis of Hybrid Dynamic Systems: Problem Formulation, Methods, and Challenges
A fault can be defined as a non-permitted deviation of at least one characteristic property of a system or one of its components from its normal or intended behavior. Fault diagnosis is the operation of detecting faults and determining possible candidates that explain their occurrence. Online fault diagnosis is crucial to ensure safe operation of complex dynamic systems in spite of faults affecting the system behaviors. Consequences of the occurrence of faults can be severe and result in human casualties, environmentally harmful emissions, high repair costs, and economical losses caused by unexpected stops in production lines. Therefore, early detection and isolation of faults is the key to maintaining system performance, ensuring system safety, and increasing system life.
Faults may manifest in different parts of the system, namely, the actuators (loss of engine power, leakage in a cylinder, etc.), the system (e.g., leakage in the tank), the sensors (e.g., reduction of the displayed value relative to the true value, or the presence of a skew or increased noise preventing proper reading), and the controller (i.e., the controller does not respond properly to its inputs sensor reading). Faults can be abrupt (e.g., the failed-on or failed-off of the pump and the stuck opened or stuck closed of the valve), intermittent or gradual (degradation of a component). Faults also may occur in a single or a multiple scenario. In the former, one fault candidate explains the observations (is responsible for the fault behavior). In the latter, several fault candidates are responsible for the fault behavior.
In HDS, faults can occur as a change in the nominal values of parameters characterizing the continuous dynamics, and are called parametric faults. Faults can also occur in the form of abnormal or unpredicted mode-changing behavior and are called discrete faults. Therefore, two types of faults should be considered for HDS depending on the dynamics that is affected by faults (parametric or discrete). Discrete faults are related to faults in actuators and usually exhibit great discontinuities in system behavior, whilst parametric faults are related to tear and wear and introduce faults with much slower dynamics. For parametric faults, after the fault detection and isolation (determining the fault candidate), a fault identification phase is required in order to estimate the amplitude (e.g., the section of leakage of a tank) of the fault, its time of occurrence, its importance, etc.
For the example of three-cellular converters, eight faults can be considered for the diagnosis [4] as it is depicted in Fig. 1.2. Parametric faults (abnormal deviation of the nominal value of capacitors) are principally due to the effect of aging or pollution. The discrete faults (switch stuck-on or stuck-off) are more frequent and their consequences are more destructive. For instance, in open-circuit (stuck-off) failure, the system operates in degraded performance. However, unstable load may lead to further damage on the system. Therefore, the fault diagnosis of these faults is necessary to ensure the system safety and quality.

Faults for the diagnosis of three-cell converters
The fault diagnosis task [9, 10] is generally performed by reasoning over differences between desired or expected behavior, defined by a model, and observed behavior provided by sensors. This task can be performed offline or online. Offline diagnosis assumes that the system is not operating in normal conditions but it is in a test bed, i.e., ready to be tested for possible prior failures. The test is based on inputs, e.g. commands, and outputs, e.g. sensors readings, in order to observe a difference between the resulting signals with the ones obtained in normal conditions. In online diagnosis, the system is assumed to be operational and the diagnostic module is designed in order to continuously monitor the system behavior, isolate and identify failures. Within these methods, we can distinguish between active diagnosis that uses both inputs and outputs, and passive diagnosis that uses only system outputs. The diagnosis can also be non-incremental (i.e., the diagnosis inference engine is built offline) or incremental (the diagnosis inference engine is built online in response to the observation).
There are numerous methods in the literature that are used to perform fault diagnosis in HDS. They can be divided into internal, or model-based, and external, or data-driven, methods. The internal methods (see Fig. 1.3) use a mathematical or/and structural model to represent the relationships between measurable variables by exploiting the physical knowledge or/and experimental data about the system dynamics. They can be categorized into residual-based and set-membership [11] approaches. In residual-based approaches, the response of the mathematical model is compared to the observed values of variables in order to generate indicators used as a basis for the fault diagnosis. Generally, the model is used to estimate the system state, its output, or its parameters. The difference between the system and the model responses is monitored on the basis of residual generation. Then, the trend analysis of this difference can be used to detect changing characteristics of the system resulting from a fault occurrence. Set-membership based fault diagnosis techniques are used for the detection of some specific faults. Generally, they discard models that are not compatible with observed data, in contrast to the residual-based approaches which identify the most likely model.

Internal methods for fault diagnosis
The external methods [3, 12,13,14,15] (see Fig. 1.4) consider the system as a black box, in other words, they do not need any mathematical model to describe the system dynamical behaviors. They use exclusively a set of measurements or/and heuristic knowledge about system dynamics to build a mapping from the measurement space into a decision space. They include expert systems and machine learning and data mining techniques.

External methods for fault diagnosis
A key challenge of fault diagnosis of HDS is related to the state estimation and tracking because of the cohabitation of continuous and discrete dynamics. Therefore, the fault diagnosis requires distinguishing between healthy and faulty states during mode changes for all hybrid trajectories generated by the system. However, tracking all the possible trajectories of a hybrid system is computationally intractable, in particular in the presence of faults. This is due to multiple reasons. Firstly, faults cause unknown changes in the system model. Thus, it becomes challenging to differentiate the change in behavior due to a fault from change in behavior caused by a normal mode transition. Secondly, pre-enumerating all the operation modes of a system is computationally intractable, in particular in the presence of faults. Indeed computing the reachable set of states of HDS is an undecidable problem due to the infinite state space of continuous systems.
Another challenge is related to the robustness of fault diagnosis and its time processing to issue the decision (fault detection and isolation). Indeed, the diagnosis engine must be able to manage out of order alarms and handle uncertainties and issue the diagnosis decision enough fast in order to give ample time to human operators of supervision to implement corrective and maintenance actions.
Finally, the diagnosis engine (inference) must scale well to large systems with multiple discrete modes. Indeed, a global model representing both the discrete and continuous dynamics can be too huge to be physically constructed for systems with large number of discrete modes.
1.3 Contents of the Book
This edited Springer book presents recent and advanced approaches and techniques that address the complex problem of fault diagnosis of hybrid dynamic and complex systems using different model-based and data-driven approaches in different application domains (inductor motors, chemical process formed by tanks, reactors, and valves, ignition engine, sewer networks, mobile robots, planetary rover prototype, etc.). These approaches cover the different aspects of performing single/multiple online/offline parametric/discrete abrupt/tear and wear fault diagnosis in incremental/non-incremental manner, using different modeling tools (hybrid automata, hybrid Petri nets, hybrid bond graphs, extended Kalman filter, etc.) for different classes of hybrid dynamic and complex systems.
1.3.1 Chapter 2
This chapter proposes a model built by learning from historical data (available sensor data) set in order to perform the fault diagnosis of induction motor. The considered faults are represented by five classes (normal, broken rotor bars, unbalanced voltages, stator winding faults, and eccentricity problems). The proposed approach exploits an evolving type-2 random vector functional link network (eT2RVFLN) since it allows dealing with four issues common in industrial processes: temporal system behavior, uncertainties in the data streams, a changing learning environment, and a large number of features. The proposed approach is split into three phases: (1) the what-to-learn phase allows to select a relevant subset of training samples, (2) the how-to-learn phase prunes and generates nodes in the hidden layer of the network, applies feature selection and parameter learning, and lastly (3) the when-to-learn phase assigns samples to the reserved sample set which are not considered for learning right away. The authors evaluated the method for diagnosis of induction motors and compared the approach to five other classifiers on two data sets (one with added noises and one without added noise). The obtained results show that the proposed approach outperforms the other methods in regard to their classification rate, learning time, and number of samples used during training.
1.3.2 Chapter 3
This chapter presents an approach to perform the fault detection and isolation of discrete and parametric faults when they may occur together in a single fault scenario. The proposed approach is based on the use of a hybrid bond graph that accounts for parameter uncertainties (multiplicative) and measurement noises (additive). The generated residuals from the hybrid bond graph are therefore robust against these uncertainties and noises and are sensitive for both discrete and parametric faults. Indeed, these residuals take into account not only the magnitude of the deviation from the system’s healthy conditions but also the direction (increase/decrease) of this deviation. The goal is to improve the fault isolation in particular when the behavior (fault signature) of parametric faults is similar to the discrete faults. In this case, the fault isolation is much complicated in comparison to continuous dynamic systems because the discrete mode fault may occur besides or together with a parametric fault in hybrid dynamic systems. Therefore, when a fault is detected, the cause of the residual inconsistency must be determined as a discrete mode fault or due to a parametric fault. In the former, a reconfiguration/shutdown procedure may be launched in response to the fault occurrence; while in the latter, parameter estimation is required to estimate the magnitude of the suspected parameters with known discrete mode information in order to calculate its severity. Then this information is provided to the decision-making system for fault accommodation. The discrimination between parametric faults and discrete mode faults is based on the magnitude of the residuals. The generated residuals are bounded within some time varying thresholds and then are used to generate fault signatures for different parametric or discrete mode faults. The proposed approach is applied for the fault diagnosis of discrete and parametric faults of a hybrid two-tank system using numerical simulation. The advantage of this method is its capacity to distinguish between discrete fault (e.g., valve stuck-on/valve stuck-off) from a parametric fault (valve partially stuck-on/valve partially stuck-off) based on the magnitudes of robust thresholds against parameter uncertainties and measurements noises. However, its computation complexity grows exponentially for large-scale systems with multiple discrete modes.
1.3.3 Chapter 4
This chapter presents an approach based on the use of max-plus algebra to perform the parametric and discrete faults of hybrid dynamic systems, in particular switching linear systems without concurrency. The latter are equivalent to continuous piecewise affine (PWA) systems where the state space is partitioned into a finite number of polyhedral regions. Each one of the latter is associated with different affine dynamics that the system switches between. The advantage of using max-plus algebra is its capacity to transform inference (that are nonlinear in a conventional algebra) on system timed dynamics to be linear in the max-plus algebra. The max function models the synchronization between events: an event occurs once all processes it depends on have finished. The + function models the process times: the moment a process finishes must equal the sum of starting time and the time the process takes to finish. The presented approach considers the switching behaviors as stochastic in order to capture the stochastic nature of the faults. The proposed approach is based on three steps. The first step is based on the use of an observer in order to generate residuals that are used to detect fault occurrences. The second step looks to estimate the most likely discrete modes in order to calculate the corresponding set of residuals. The third step aims at computing the most likely fault based on the optimization of a cost function and a set of residuals. The diagnosis inference is based on the time properties of the system: an event occurs too early, too late or does not occur at all. These properties are modeled using a timed event graph which is a subclass of time Petri nets. The proposed approach is illustrated and tested using an example of chemical process formed by two tanks, two reactors and seven valves. The evolution of the solvent level in the different tanks and reactors represents the continuous dynamics, while opening and closing the different valves represent the discrete dynamics (switching) of the system. The parametric faults are simulated as leakages in the tanks or reactors or a partial stuck-on/stuck-off of the valves. The discrete faults are represented by stuck-on/stuck-off faults. The main advantage of the proposed approach is the linear computational complexity of its diagnosis inference. However, its main drawback is its need to have information about each discrete and parametric fault behavior. This may impact the scalability of the proposed approach in the case of large-scale systems with multiple discrete modes.
1.3.4 Chapter 5
This chapter proposes a model-based approach in order to perform the simple and multiple fault diagnosis of hybrid dynamic systems. The proposed approach is based on three steps: residual generation, residual assessment, and fault localization. The residual generation is achieved offline and online. In order to generate the residuals offline, a hybrid dynamic simulator, called PrODHyS, is used to generate the reference model. The latter represents the normal, fault-free, system behavior. Then, faults are injected into the reference model in order to simulate the resulting fault behaviors. Then, residuals sensitive to each of these simple and multiple faults are generated and normalized in order to obtain the theoretical (simulated) fault signatures. The residuals are generated online by comparing the state of the reference model with the estimated one. The latter is obtained by using the extended Kalman filter allowing to improve the robustness of the monitoring against noises and uncertainties and therefore to avoid false alarms. The online generated residuals are normalized in order to obtain the instantaneous fault signature. Then, the distance between the latter and the offline fault signatures is calculated using an improved version of Manhattan distance. This distance provides an indication about the fault occurrence and its amplitude. The proposed approach was applied to perform simple and multiple faults detection and isolation using a complex chemical system composed by interconnected and shared resources (reactors/valves), in which a continuous treatment is carried out. The main advantage of the proposed approach is its capacity to diagnose simple and multiple faults as well as degradations in the system performance (quality). However, it needs to build a reference model about the system dynamics as well as to simulate the fault behaviors. This increases the computational complexity of the proposed approach for large-scale systems with multiple discrete models.
1.3.5 Chapter 6
This chapter presents a model-based diagnosis framework in order to diagnose both parametric and discrete faults of a class of hybrid dynamic systems (HDS). This class of HDS has continuous behavior controlled by discrete events. In those systems, the main source of hybrid behavior is discrete actuators, like valves or switches in fluid or electrical systems. The used model is hybrid bond graphs (HBGs) allowing providing a graphical description of the system’s dynamics (links between its different variables). The diagnosis is performed based on the verification of the consistency (or conflicts) of a set of hypotheses represented by algebraic or differential equations. This verification allows generating fault hypotheses (residuals) from observed measurement deviations. Then, fault signatures are derived from residuals in order to isolate the fault source. This approach assumes that a discrete fault exhibits great discontinuities in system behavior, while parametric faults are related to tear and wear and introduce faults with much slower dynamics. Two examples are used to illustrate and evaluate the proposed approach. The first example is a simple electric circuit with two discrete switches, two batteries in parallel and a load of a resistance and a capacity. The second example is a hybrid four-tank system using on/off valves. The discrete faults are stuck-on/stuck-off of the actuators (switches/valves) and the parametric faults are related to the abnormal decrease/increase of the nominal value of resistance/capacity/fluid due to, as an example, the aging or pollution effect. The main advantage of the proposed approach is that the complete enumeration of the system operation modes (configurations) is not necessary and it can model nonlinear behavior. However, it requires the knowledge about the global model in order to build the algebraic or differential equations between the system variables in each configuration. This may be a handicap for the diagnosis of large-scale hybrid dynamic systems.
1.3.6 Chapter 7
This chapter proposes a model-based approach for online fault diagnosis for a spark ignition automotive engine. The forward and backward motions of fluids, the different strokes of the piston cycle, fuel injection, ignition and combustion, etc., the transient dynamics of the automotive engine is best modeled as a hybrid system with nonlinear continuous dynamics in its various discrete modes. The proposed fault diagnosis scheme starts with a continuous state estimation stage from inputs and measurements using a single extended Kalman filter (EKF) estimator. This is followed by a residual prediction stage in order to predict a residual vector corresponding to each fault hypothesized. Then, the hypothesis testing stage generates fault detection functions for each fault using the predicted and actual residuals. Each detection function is compared to its respective thresholds, which are experimentally decided based on simulations, followed by the isolation stage that aims at isolating the fault source using predicate logic and knowledge of the process, under the assumption that at most a single fault could occur. Once the fault is isolated, the parameters (e.g., magnitude) of the isolated fault are identified using a joint estimation in the nominal EKF itself, or dual estimation, or some other separate estimators like particle filters. This approach is applied for the diagnosis of parametric faults of ignition engine such as a leak in the manifolds, injector block, cylinder valve wear, and sensor failures. The advantage of this approach is its computational efficiency allowing it to be used for on-board fault diagnosis implementations. However, it requires an additional computational computing in order to refine the set of isolated fault candidates. This may handicap its capacity to perform a precise fault diagnosis online.
1.3.7 Chapter 8
The chapter proposes a model-based, qualitative fault diagnosis framework for hybrid dynamic systems which can diagnose both parametric and discrete faults, and can handle observation delays. This approach is based on a structural model decomposition in order to decompose the model into independent submodels. The input and output variables are assigned locally to each submodel. Then, residuals are generated according to each submodel as well as the different switching modes. The residuals are transformed into qualitative 0 (no change), − (decrease), and + (increase) changes for the magnitude and slope in the residual. Once a residual is detected to deviate in a statistically significant manner from zero, symbols (0, −, +) are generated for that residual, and fed into the fault isolation module. Since local submodels are used, the residual generator will only contain the local modes of that submodel which is less than the number of system modes. Thus, fewer modes must be searched and the diagnosis efficiency is improved. The proposed approach is applied to two examples. The first example is an electric circuit that includes a voltage source, two capacitors, two inductors, two resistors and two switches, connected through a set of serial and parallel connections. Sensors measure the current or voltage in different locations. Each switch can be in one of two modes: on and off. Thus, this circuit can be represented as a hybrid system, with four system-level modes. The second example is the Advanced Diagnostics and Prognostics Testbed (ADAPT). It is an electrical power distribution system developed at NASA Ames Research Center and is used as a case study to demonstrate that the approach can correctly isolate faults in hybrid systems even if the system transitions among different modes and presents observation delays during the isolation process. It comprises a battery, circuit breakers, relays, AC to DC inverter, DC load and AC load. The structural model decomposition has the advantage to avoid the mode pre-enumeration problem and to facilitate the reusability of component models and their maintenance. In addition, it decreases the complexity of the hybrid system diagnosis problem since each submodel is dependent on only a subset of the system faults as well as a limited number of modes. However, the proposed approach is applied for single fault scenarios and considers that all mode change events are observable. In addition, it assumes the feasibility of finding a structure decomposition allowing obtaining independent submodels.
1.3.8 Chapter 9
This chapter proposes a model-based scheme to perform the online fault diagnosis of hybrid dynamic systems. The proposed scheme is based on two phases: offline and online. The offline phase comprises two steps. The first step aims at building the model of the system using the hybrid particle Petri net (HPPN) framework. The latter is built either from a multimode description of the system or directly from expert knowledge. This model comprises the health modes of the hybrid system (nominal, degraded, and failure modes). They are represented by combinations of discrete states, continuous dynamics and degradation dynamics. Transitions aim at modeling the changes of health modes from one health mode (one for each type) to another health mode. The second offline step is the generation of the diagnoser based on the HPPN model. In the online phase, the built diagnoser is used to perform the diagnosis using the system consecutive observations (inputs and outputs). The proposed diagnosis scheme is evaluated and illustrated using two examples. The first example is a mobile robot with a motor commanded by on/off command. The second example is the K11 planetary rover prototype. The K11 is a testbed developed by NASA Ames Research Center to be used for diagnostics and prognostics purposes. It is powered by 24 2:2 Ah lithium-ion single cell batteries. The battery charge depletion, the motor overheating, the failed motor temperature sensors are examples of the faults diagnosed by the proposed diagnosis scheme. The advantage of the proposed diagnosis scheme is its capacity to take into account the uncertainty in the system representation. However, the model is built intuitively. This may handicap the flexibility of the proposed scheme for the diagnosis of complex hybrid systems in particular the large-scale ones with multiple discrete modes.
1.3.9 Chapter 10
This chapter focuses on the use of the hybrid automaton framework to develop a method for diagnosing both structural and non-structural faults in hybrid dynamic systems. Diagnosis is directly performed by interpreting the events and measurements issued by the physical system with respect to the hybrid automaton model. The discrete event part of the hybrid automaton constrains the possible transitions among modes and is referred to as the underlying discrete event system (DES). Then, the residuals capturing the consistency of the continuous dynamics are defined for each discrete mode. The abstraction of these residuals generates events, referred to as signature events, and is used to enrich the underlying DES. This enrichment leads to obtain the so-called behavior automaton from which a diagnoser can be built. The latter can operate in a non-incremental and an incremental manner. In the non-incremental form, the diagnoser is built using the global model whereas in the incremental form only the useful parts of the diagnoser are built, developing the branches that are needed to explain the occurrence of incoming events. The proposed approach is evaluated using a representative part of the Barcelona sewer networks. The latter present several elements exhibiting numerous operating modes depending on the sewer flows. The used part of the sewer networks comprises nine virtual tanks, one real tank, three redirection gates, one retention gate, one four rain gauges to measure the rain intensity, and ten limnmeters to measure the sewer level. The control gates are commanded by a controller where actions are open or close gate depending on the flow in the sewer. The structural faults are the stuck-on and stuck-off faults while the non-structural faults are the faults in sensors. The advantage of the proposed approach is its capacity to be used in incremental manner. This allows to obtain a significant gain in terms of memory storage compared to building offline the full diagnoser. However, the proposed approach is not adapted to scale with large-scale systems with multiple discrete modes.
References
Van Der Schaft, A. J., & Schumacher, J. M. (2000). An introduction to hybrid dynamical systems (Vol. 251). London: Springer.
Branicky, M. S., Borkar, V. S., & Mitter, S. K. (1998). A unified framework for hybrid control: Model and optimal control theory. IEEE Transactions on Automatic Control, 43(1), 31–45.
Rodrigues, L., & Boyd, S. (2005). Piecewise-affine state feedback for piecewise-affine slab systems using convex optimization. Systems & Control Letters, 54(9), 835–853.
Louajri, H., & Sayed-Mouchaweh, M. (2014). Decentralized diagnosis and diagnosability of a class of hybrid dynamic systems. In 11th International conference on informatics in control, automation and robotics (ICINCO) (Vol. 2).
Shahbazi, M., Jamshidpour, E., Poure, P., Saadate, S., & Zolghadri, M. R. (2013). Open-and short-circuit switch fault diagnosis for nonisolated dc–dc converters using field programmable gate array. IEEE Transactions on Industrial Electronics, 60(9), 4136–4146.
David, R., & Alla, H. (2010). Discrete, continuous, and hybrid Petri nets. Berlin Heidelberg: Springer.
Wang, D., Arogeti, S., Zhang, J. B., & Low, C. B. (2008). Monitoring ability analysis and qualitative fault diagnosis using hybrid bond graph. IFAC Proceedings Volumes, 41(2), 10516–10521.
Henzinger, T. A. (2000). The theory of hybrid automata. In Verification of digital and hybrid systems (pp. 265–292). Berlin Heidelberg: Springer.
Sayed-Mouchaweh, M., & Lughofer, E. (2015). Decentralized fault diagnosis approach without a global model for fault diagnosis of discrete event systems. International Journal of Control, 88(11), 2228–2241.
Sayed-Mouchaweh, M. (2014). Discrete event systems: Diagnosis and diagnosability. New York: Springer.
Tabatabaeipour, M., Odgaard, P. F., Bak, T., & Stoustrup, J. (2012). Fault detection of wind turbines with uncertain parameters: A set-membership approach. Energies, 5(7), 2424–2448.
Hartert, L., & Sayed-Mouchaweh, M. (2014). Dynamic supervised classification method for online monitoring in non-stationary environments. Neurocomputing, 126, 118–131.
Sayed-Mouchaweh, M., & Messai, N. (2012). A clustering-based approach for the identification of a class of temporally switched linear systems. Pattern Recognition Letters, 33(2), 144–151.
Toubakh, H., & Sayed-Mouchaweh, M. (2015). Hybrid dynamic data-driven approach for drift-like fault detection in wind turbines. Evolving Systems, 6(2), 115–129.
Sayed-Mouchaweh, M. (2004). Diagnosis in real time for evolutionary processes in using pattern recognition and possibility theory. International Journal of Computational Cognition, 2(1), 79–112.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Sayed-Mouchaweh, M. (2018). Prologue. In: Sayed-Mouchaweh, M. (eds) Fault Diagnosis of Hybrid Dynamic and Complex Systems. Springer, Cham. https://doi.org/10.1007/978-3-319-74014-0_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-74014-0_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-74013-3
Online ISBN: 978-3-319-74014-0
eBook Packages: EngineeringEngineering (R0)