
Abstract
In this chapter, we document the reasoning students exhibited when engaged in an instructional sequence designed to support student development of notions of eigenvectors, eigenvalues, and the characteristic polynomial. Rooted in the curriculum design theory of Realistic Mathematics Education (RME; Gravemeijer, 1999), the sequence builds on student solution strategies from each problem to the next. Students’ used their knowledge of how matrix multiplication transforms space to engage in problems involving stretch factors and stretch directions. In working through these problems students reinvented general strategies for determining eigenvectors, eigenvalues, and the characteristic polynomial.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
1 Background
A number of researchers have studied various aspects of student conceptions of eigenvectors and eigenvalues (e.g., Gol Tabaghi & Sinclair, 2013; Salgado & Trigueros, 2015; Sinclair & Gol Tabaghi, 2010; Stewart & Thomas, 2006; Thomas & Stewart, 2011). This chapter focuses on aspects of student understanding relating to the equation \(A\vec{x} = \lambda \vec{x}\). Specifically, we introduce an instructional sequence from the IOLA curriculum which is based on the instructional design theory of Realistic Mathematics Education (RME; Gravemeijer, 1999). We document existing student understanding and how it informs their approaches in this task sequence. These examples also demonstrate the types of student understanding the curriculum makes possible by engaging students in reflection on their own prior mathematical activity.
In previous work, members of our research team explored student understanding of the equation \(A\vec{x} = \lambda \vec{x}\) or \(A\left[ {\begin{array}{*{20}c} x \\ y \\ \end{array} } \right] = 2\left[ {\begin{array}{*{20}c} x \\ y \\ \end{array} } \right]\) in which the students were told that A is a 2 × 2 matrix and \(\vec{x}\) is a vector or \(\left[ {\begin{array}{*{20}c} x \\ y \\ \end{array} } \right]\) is a vector in \({\mathbb{R}}^{2}\) (Henderson, Rasmussen, Sweeney, Wawro, & Zandieh, 2010; Larson, Zandieh, Rasmussen, & Henderson, 2009). Students who were in a linear algebra class but had not yet studied eigentheory interpreted the equations in a variety of ways such as concluding the equation was only true if A = 2, concluding that det(A) = 2, carrying out the multiplication to create a system of equations to solve for an \(x,y\) pair (or pairs), and arguing that the way A acts on the vector must be the same as what multiplication by 2 does to the vector. Students used a variety of symbolic, numeric, and geometric interpretations as they discussed the equation in terms of a system of equations, a linear transformation, or a vector equation. This is closely related to the framework of Larson and Zandieh (2013) who described a similar set of interpretations and representation used by students more broadly for the equation \(A\vec{x} = \vec{b}\). Building on this research, our team developed an instructional sequence for learning eigenvalues and eigenvectors to mitigate issues that students might have with the equation \(A\vec{x} = \lambda \vec{x}\). Rather than approaching eigentheory instruction by beginning with the equation \(A\vec{x} = \lambda \vec{x}\), the sequence uses geometric notions of stretch factors and stretch directions of a linear transformation.
The eigentheory instructional sequence consists of four tasks and is the third of three units in the Inquiry-Oriented Linear Algebra curriculum (IOLA, iola.math.vt.edu). Each unit was developed from the perspective of Realistic Mathematics Education, which holds students’ mathematical activity at the center of mathematical progress in the classroom (e.g., Freudenthal, 1991; Gravemeijer, 1999). Students work on tasks in small groups and explain their group’s work to the rest of the class. A role of the instructor is to serve as a broker between students’ mathematical activity and the mathematics of the mathematical community (Rasmussen, Zandieh, & Wawro, 2009; Zandieh, Wawro, & Rasmussen, 2017). One aspect of the role of the instructor is to introduce students to definitions and symbols used in the mathematics community that align with the mathematical activity in which students have already been engaged through their work on the tasks in the unit. In other words, in this curriculum definitions such as eigenvector and eigenvalue and symbols such as \(A\vec{x} = \lambda \vec{x}\) are introduced only after the students have been working with the tasks in ways that experts would recognize as appropriate to symbolize with this expression.
In Units 1 and 2, the curriculum develops and explores various linear algebra concepts and how they relate to each other. These include: linear combination, span, linear independence, row reduction, systems of equations, linear transformations, and matrix operations. Unit 3 of the IOLA curriculum develops diagonalization and eigentheory. The first two tasks of Unit 3 are discussed in detail in Zandieh, Wawro, and Rasmussen (2017). We summarize that student activity in the next section to help frame the story of this chapter, in which we share the third task of the sequence. Task 3 focuses on student exploration of the relationships that an expert would think of as being summarized by the equation \(A\vec{x} = \lambda \vec{x}\). Our discussion of Unit 3 Task 3 centers on examples of typical student responses from small group discussions in two classes. We collected these examples from students’ work during semester long implementations of the IOLA curriculum at two different universities. Students working on this Task drew on their mathematical experience with Tasks 1 and 2 of Unit 3 as well as their work in prior units. In order to provide a sense of how students in these two classes produced their responses, we briefly outline the IOLA curriculum prior to this task and the types of activity in which students had been engaging.
2 Students’ Prior Mathematical Activity
In general, the IOLA materials provide students with early and frequent opportunities to interpret problem situations using systems of equations, vector equations, and matrix equations, as well as to translate between these representations and explain connections between them. Specifically, in Unit 1, which is about span and linear independence, students have opportunities to represent travel scenarios (involving vectors representing travel on a magic carpet and a hover board to particular locations) as vector equations (Wawro, Rasmussen, Zandieh, & Larson, 2013; Wawro, Rasmussen, Zandieh, Sweeney, & Larson, 2012). Many students convert these vector equations to systems of equations, and some who have previous experience in linear algebra represent the equations using an augmented matrix or a matrix equation.
In Unit 2 of the IOLA curriculum, students represent geometric transformations of Cartesian space as a matrix times an input vector and, subsequently, as a matrix times a matrix of concatenated input vectors (Andrews-Larson, Wawro, & Zandieh, 2017; Wawro, Larson, Zandieh, & Rasmussen, 2012). This way of representing transformations begins with students’ work with the “Italicizing N” task. In this unit, students complete a series of tasks to determine matrices for various transformations based on a description of the transformations’ effect on specific input vectors. For instance, based on Fig. 1, students often generate the matrix equations \(\left[ {\begin{array}{*{20}c} a & b \\ c & d \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 0 \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 1 \\ 4 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} a & b \\ c & d \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 2 \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 3 \\ 4 \\ \end{array} } \right]\) as they try to determine the matrix A that acts on the pre-image “N” to produce an image of a larger, italicized “N.” Some students represent these two equations as a product between the unknown matrix and a matrix of concatenated input vectors: \(\left[ {\begin{array}{*{20}c} a & b \\ c & d \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 0 & 2 \\ 3 & 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 1 & 3 \\ 4 & 4 \\ \end{array} } \right]\). Students then rewrite these as systems of equations and solve for the variables a, b, c, and d to determine the matrix of the transformation in the standard basis.

Pre-image and image in the italicizing N task
Later, in Unit 2 Task 3, students explore the composition of linear transformations by representing the same transformation as before in two steps: one matrix that stretches the “N” to make it taller and another matrix to take the taller “N” as input and “italicize” it by shearing. The teacher builds from student work to assist them in developing an understanding of the composition of linear transformations as matrix multiplication through a substitution between the two equations. Finally, Unit 2 culminates in a task that engages students in determining the matrices that “undo” the three transformation matrices developed in Tasks 1 and 3, leading to the formal definition of the inverse of a matrix and a linear transformation. Throughout Unit 2, students are continually shifting between matrix equations and systems of linear equations to solve for unknown values in a given matrix.
Unit 3 begins with a task that describes a transformation from \({\mathbb{R}}^{2}\) to \({\mathbb{R}}^{2}\) that stretches vectors along two directions (represented by the linear equations y = x and y = −3x) by the stretch factors 1 and 2, respectively (Zandieh et al., 2017). Building upon the approaches developed during Unit 2, students often produce the matrix equations \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} { - 2} \\ 6 \\ \end{array} } \right]\). This typically leads to the development of a system of four equations with four unknowns. Along with this activity, students are asked to sketch the result of the transformation of the plane, which helps lead to a discussion about representing the plane relative to a basis comprised of vectors in the stretch directions and considering the linear transformation relative to that basis. This in turn motivates a change of basis, which instructors can readily represent with a commutative diagram and the diagonalization equation, A = PDP −1.
Although students typically solve Unit 3 Task 1 using the equations above, occasionally, students might represent their work using the equations \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right] = 1\left[ {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = 2\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right]\), in which the stretch factor is explicitly written as a scalar on the right-hand side of the matrix equation. These equations are what we are calling in this chapter “matrix times vector equals scalar times vector” (mtv = stv) equations. Specifically, we use the mtv = stv label to denote representations of the eigen equation that use numbers and variables in arrays of matrices and n-tuples. Although to the expert, these equations are simply a more specified version of the generalized eigen equation \(A\vec{x} = \lambda \vec{x}\), we want to distinguish student use of different types of symbolizations to emphasize transitions in their reasoning. As part of making this distinction we call the equation \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = 2\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right]\) an mtv = stv equation but call the equation \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} { - 2} \\ 6 \\ \end{array} } \right]\) an mtv = v equation. This choice may seem odd because the equations are distinguished only by whether the scalar is multiplied by the entries in the vector on the right-hand side of the equation. However, the equation \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} { - 2} \\ 6 \\ \end{array} } \right]\) may initially appear to students to be simply another example of equations such as \(\left[ {\begin{array}{*{20}c} a & b \\ c & d \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} 0 \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 1 \\ 4 \\ \end{array} } \right]\) that they encountered in Unit 2. We see equations such as \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} { - 2} \\ 6 \\ \end{array} } \right]\) as a fulcrum between the ideas about linear transformations from \({\mathbb{R}}^{2}\) to \({\mathbb{R}}^{2}\) the students learned in Unit 2 and the new ways of reasoning about mtv = stv and \(A\vec{x} = \lambda \vec{x}\) equations that the students need to learn in Unit 3.
In particular, mtv = v equations like \(\left[ {\begin{array}{*{20}c} q & r \\ s & t \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} { - 1} \\ 3 \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} { - 2} \\ 6 \\ \end{array} } \right]\) connect to students’ existing, concrete ways of thinking about linear transformations geometrically and to the matrix equation notation \(A\vec{x} = \vec{b}\). Another important connection is that mtv = stv equations can be converted into mtv = v equations and then rewritten as a system of equations, which students use to solve for unknown variables. Finally, mtv = stv equations can be used to support connecting these aspects of linear transformations more formally with the general eigen equation. Thus, the notation used in mtv = stv equations allows students to engage in specific, contextualized mathematical problem solving that is leveraged to support general notions of eigenvectors and eigenvalues.
We have provided this outline highlighting prior tasks in the curriculum to emphasize the types of thinking and solution strategies students in our courses typically have available when they approach the problems in Unit 3 Task 3. Of specific importance are their ways of representing transformations from \({\mathbb{R}}^{2}\) to \({\mathbb{R}}^{2}\) as a matrix times a vector (or matrix of concatenated vectors) and translate to a system of equations to solve for unknown values in these matrices and vectors, specifically using the mtv = stv and A = PDP −1 equations.
3 Discussing Task 3 and Results from Students’ Solutions
As stated in the introduction the overall learning goal for Task 3, which is composed of three problems, is for students to explore the relationships involved in the equation \(A\vec{x} = \lambda \vec{x}\) and to develop intuitive notions of eigenvalue and eigenvector. As with earlier tasks, we cast the problems in this task geometrically, in terms of stretch factors and stretch directions, but we ask students to provide numeric solutions, giving students the impetus to create and manipulate symbolic expressions to find those numeric solutions. The three problems are ordered in increasing level of difficulty. Having already asked students (in Task 1) to find a matrix given stretch factors and stretch directions, we now recast this by switching which information is given and which is requested, as follows:
-
P1.
The matrix and the stretch directions are given and students are asked to find the stretch factors.
-
P2.
The matrix and the stretch factors are given and students are asked to find the stretch directions.
-
P3.
The matrix is given, and students are asked to find both the stretch factors and the stretch directions.
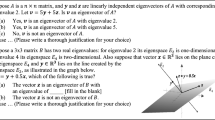
In creating the Task, we have chosen to restrict the problems so that students would work in \({\mathbb{R}}^{2}\), i.e., with 2 × 2 transformation matrices (Fig. 2). This keeps the systems small enough so that the students can realistically solve three of them within a single 50–75 min class period and also ensures that students encounter only linear and quadratic polynomials in their work.

Problem statements in Unit 3 Task 3
This sequence is intended to allow students to develop a connection between the problem statements, which are given in terms of stretch factors and stretch directions, and the general eigen equation \(A\vec{x} = \lambda \vec{x}\). As discussed above, the mtv = stv equation emerges from student work on the problems in the Task. At first the equation is more of an expression by students of the fact that the transformation matrix stretches or shrinks the stretch vector by the amount of the stretch factor. As the Task progresses, students must use variables to represent unknown stretch factors and stretch directions. From this need, variations on the mtv = stv equation emerge in students’ work. It is rare for students to use \(\lambda\) as the symbol for stretch factors; symbols such as \(c\) or \(k\) are more common. It is not until their work in this task is connected by the instructor to the broader mathematical community’s eigenvector and eigenvalue conventions that students switch to the more common \(\lambda\). Thus, in this chapter, we use k or c in our generic discussions of student symbolizations to help emphasize that students are not yet familiar with the terminology or common notation associated with eigenvectors and eigenvalues.
Because of their prior work in the unit, students are typically able to connect the stretch direction and stretch factor language with matrix multiplication notation, identifying how the product of a matrix and vector can come to represent a vector being stretched under a transformation of a vector space. This is consistent with student work in Unit 3 Task 1, in which students are asked to determine the matrix of a transformation that stretches vectors along two given lines by respective factors. In the time between Unit 3 Task 1 and Unit 3 Task 3, the students will have completed two lessons involved in developing notions of change of basis matrices as a means for representing linear transformations that stretch along a basis of stretch directions. This also provides students with the ability to incorporate the equation A = PDP −1 into their work.
In Problem 2 (Fig. 2), students are given a different matrix and stretch factors and are asked to find the corresponding stretch directions. They should notice that there are infinitely many ways to describe the stretch direction for a given stretch factor. Also, importantly, students are not able to merely calculate the product of the matrix times a vector or the stretch factor times a vector as they may have before, but instead must use a generalized stretch direction vector in their approach the problem. Because of this, we conjecture that students are more likely than before to write a matrix equation with the product of the stretch direction and stretch factor on the right-hand side. Problem 3 only provides students with the matrix and asks them to find both stretch directions and stretch factors. In this problem, students will need to recognize that they cannot solve for any of the unknowns directly, but that there are infinitely many solutions for the stretch direction. In addition, students’ work (specifically, on problem 3) can be leveraged here and later in Task 4 to develop the idea of the characteristic polynomial and how finding its roots for a given matrix is equivalent to determining the stretch factors of that matrix.
In the following subsections, we provide examples of common student approaches to Problems 1–3. We have chosen the examples of student work based on how representative they are of students’ approaches and also based on their usefulness for being leveraged to support more general and formal ideas of eigentheory.
3.1 Finding Stretch Factors
As shown in Fig. 2, Problem 1 provides students with stretch directions and a given matrix and asks them to find the stretch factor for each stretch direction. Students initially realize they will need to find at least one vector that lies on the line y = 1/2x and at least one vector that lies on the line y = −x. Two common choices are \(\left[ {\begin{array}{*{20}c} 2 \\ 1 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} { - 1} \\ 1 \\ \end{array} } \right]\), respectively. Students then determine the factor by which each of these vectors is stretched when multiplied by the given matrix.
The first example of student work that we discuss (Fig. 3) exemplifies a typical approach that we have seen after several implementations of the IOLA curriculum. This group of students began by multiplying the given matrix \(A\) times the vectors \(\left[ {\begin{array}{*{20}c} 2 \\ 1 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} { - 1} \\ 1 \\ \end{array} } \right]\), which yielded the vectors \(\left[ {\begin{array}{*{20}c} { - 6} \\ { - 3} \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} { - 9} \\ 9 \\ \end{array} } \right]\), respectively. This is a form of the mtv = stv equation in which the scalar multiple is distributed into the vectors on the right-hand side. From this, the students re-wrote the vectors on the right-hand side of the equation as scalar multiples of the vectors on the left-hand side of the equation. Although not written on their board, the students indicated in class that they (correctly) interpreted their work to imply that the desired stretch factors were 3 and −9.

Most common approach to Task 3 Problem 1
In our second example, students leveraged the equation \(A = PDP^{ - 1}\) (see Fig. 4a). To do this, they relied on the knowledge that, for a given diagonalizable matrix \(A\), its stretch factors are the diagonal entries of \(D\) and its stretch directions, in column vector form, are the respective columns of the matrix \(P\). More specifically, this group parameterized the matrix D with the unknown diagonal entries a and d, determined the matrices \(P = \left[ {\begin{array}{*{20}c} 2 & 1 \\ 1 & { - 1} \\ \end{array} } \right]\) and \(P^{ - 1} = \left[ {\begin{array}{*{20}c} {1/3} & {1/3} \\ {1/3} & { - 2/3} \\ \end{array} } \right]\) from the given information, and substituted these matrices (and also the given matrix A) into the equation \(A = PDP^{ - 1}\). Following this, they multiplied the three matrices on the right and set the resulting matrix equal to the given matrix for the transformation. This allowed the students to solve for a and d by setting corresponding components of the matrices equal to each other.

Students’ work on Task 3 Problem 1 relying on PDP −1
In the last approach we discuss, another student group also used the diagonalization equation \(A = PDP^{ - 1}\) (Fig. 4b). In particular, this group determined how to use the given information in the diagonalization equation, manipulate the equation, and solve for the matrix \(D\). They wrote the diagonalization equation \(A = PDP^{ - 1}\) with the given matrix A. They represented the stretch direction of \(y = \frac{1}{2}x\) and the stretch direction \(y = - x\) as the column vectors \(\left[ {\begin{array}{*{20}c} 2 \\ 1 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} 1 \\ { - 1} \\ \end{array} } \right]\), respectively, and they used that information to create matrix P and substitute it and \(P^{ - 1}\) (we are not sure how they computed the inverse) into the diagonalization equation (Fig. 4b, line 1). The students explained that they left multiplied by \(P^{ - 1}\) and right multiplied by P to solve for D (Fig. 4b, lines 2–3). The product P −1 AP yields \(\left[ {\begin{array}{*{20}c} { - 3} & 0 \\ 0 & 9 \\ \end{array} } \right]\) (Fig. 4b, line 4), which the students equated to D and interpreted in terms of stretch factors and directions, namely that the transformation represented by \(A\) stretch \(y = \frac{1}{2}x\) by \(- 3\) and \(y = - x\) by \(9\).
Because the stretch directions are given in equation form, the students must choose a single vector in each direction. This is consistent with and builds on the students’ work in Unit 3 Task 1, which first introduced the notions of stretch direction. As we saw in the first example, students are typically able to recognize that they only need to multiply the given matrix times a vector along the stretch direction and notice that the product is a scalar multiple of the original in order to answer the question. As demonstrated, students sometimes write this as an mtv = stv equation with the scalar factored out on the right-hand side (last row in Fig. 3). We have found this to be less common in our implementation of the curriculum, with students usually determining the stretch factors without explicitly factoring the right-hand side. However, as we demonstrate in the next section, Problem 2 tends to support students’ production of the mtv = stv equation with the scalar factored.
3.2 Finding Stretch Directions
In contrast to Problem 1, Problem 2 provides students with a matrix and two stretch factors and asks them to find the stretch directions. Most groups use an mtv = stv equation to generate a system of equations, while other groups use the equation B = PDP −1. Figure 5 shows a very detailed version of student work using the mtv = stv equation. This group used \(\left[ {\begin{array}{*{20}c} a \\ c \\ \end{array} } \right]\) as a generic stretch direction vector that is multiplied by the given matrix B on the left-hand side of the equation and the given scalar, 3, on the right-hand side of the equation. The vector \(\left[ {\begin{array}{*{20}c} b \\ d \\ \end{array} } \right]\) is their generic vector that is multiplied by the matrix B on the left and scalar 2 on the right. The group then used each of these matrix equations to generate a system of two equations with two unknowns. The students combined like terms to convert each system into standard form for systems with the variables on the left and a constant (in this case 0) on the right-hand side of the equation. The students do not state on the board why, but in each case they use the first of the two equations to write an expression of one variable in terms of the other (\(a = \frac{2}{11}c\) and d = 5b) and then convert these equations to a specific vector in each direction: \(\left[ {\begin{array}{*{20}c} a \\ c \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 2 \\ {11} \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} b \\ d \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 1 \\ 5 \\ \end{array} } \right]\). The students even reference a connection to the B = PDP −1 relationship at the bottom of their work by listing a matrix, P, with the two vectors they found as its column vectors.

Problem 2 solved by converting mtv = stv into a system of equations
Variations of this method include work similar to that in Fig. 6a, in which the group only wrote the first of the system’s two equations on their boards. This is sufficient since the two equations describe the same line and, thus, only one needs to be considered. Figure 6a is also different than Fig. 5 in that the students used \(\left[ {\begin{array}{*{20}c} x \\ y \\ \end{array} } \right]\) as their generic vector in each case and circled the results of \(y = 11/2x\) and \(y = 5x\). In this way they seemed to be emphasizing the standard format for a line through the origin where \(y\) is typically written in terms of \(x\). This group also found a particular vector in the direction of each line and multiplied that vector times the original matrix to check that indeed was multiplied by 3 (or 2).

Additional student work on Problem 2 using mtv = stv equations
In Fig. 6b we see a unique variation on this strategy. These students chose a vector \(\left[ {\begin{array}{*{20}c} 1 \\ x \\ \end{array} } \right]\), with 1 in the first component and therefore only one variable, relying on the fact that any vector in the stretch direction will work. (Their strategy would fail only if the eigenvector lies along the direction \(\left[ {\begin{array}{*{20}c} 0 \\ 1 \\ \end{array} } \right]\).) Because of the choice of \(\left[ {\begin{array}{*{20}c} 1 \\ x \\ \end{array} } \right]\) each of their equations solves for a single value of x, e.g., x = 5.5 when the scalar is 3. These students then converted their answer into a stretch direction stated as a vector with integer values, e.g., \(\left[ {\begin{array}{*{20}c} 2 \\ {11} \\ \end{array} } \right]\) instead of \(\left[ {\begin{array}{*{20}c} 1 \\ {5.5} \\ \end{array} } \right]\). This method emphasizes the stretch direction as a vector direction without stating it as the equation of a line as in the circled part of Fig. 6a. We also point out here that the groups whose work appears in Fig. 6 did not write the right-hand side of the equation as a scalar times a vector, but instead distributed each stretch direction into the vector on the right. This is a nontrivial distinction from other forms of the mtv = stv equation, specifically because the students’ distribution of the stretch factor into the stretch vector does not lend itself to the manipulation of a more general \(A\vec{x} = k\vec{x}\) equation that could be used to lead to the equation \(\left( {A - kI} \right)\vec{x} = \vec{0}\). Accordingly, it is important for instructors to point out these distinctions and, if necessary, draw out the connections during whole class discussion.
In Fig. 7 we see student work using B = PDP −1. Neither of these are resolved to a final solution. The method using PDP −1 creates a more complicated matrix with fractions (Fig. 7a). Resolving this equation into BP = PD creates simpler matrices (Fig. 7b). Once these matrices are multiplied and set equal, the next step would be to set the corresponding components of each of the resultant matrices equal. This would create four equations that are identical to the systems of equations created using the mtv = stv method. However, neither of these groups continued on the white board beyond creating the two resultant matrices.

Student work on Problem 2 using B = PDP −1
3.3 Finding Both Stretch Factors and Stretch Directions
Students are typically able to draw on a variety of their prior approaches to solve Problem 3, which, in contrast to Problems 1 and 2, provides neither the stretch directions nor the stretch factors of the transformation. Because of this, in order to solve the problem, students must identify either the stretch factor or stretch direction and then use one to solve for the other.
There are several ways in which students can find the stretch factors first. Two of these are illustrated in Fig. 8. In each case students constructed an mtv = stv equation with variables for both components of the eigenvector and a variable for the eigenvalue. In Fig. 8a we see that one group set up proportions to generate a single equation in terms of k. Although this group of students did not make it explicit, the ratio is the slope of the line described by each equation. With the proportion in terms of k, the students developed a quadratic equation. They may have noticed in solving Problem 2 (or recognized because they are solving for a single eigendirection) that both equations in the system of equations describe the same line and thus have the same slope. After solving the quadratic for the stretch factor, the students were then able to determine the corresponding stretch directions, one of which is shown on their whiteboard (Fig. 8a).

Two groups’ solutions to Problem 3
The other group opted to solve the first equation for y and substituted it into the second equation (Fig. 8b). The second group then manipulated the resulting equation into the equation x(c − 5)(c − 3) = 0. This group did not indicate whether the x-component in the stretch direction might be zero, but focused on solutions for stretch factors. After determining the stretch factor values of 3 and 5, this group substituted these values into the original system of equations and interpreted the result of the substitution (the equations 2x = y and x = y) as stretch directions. A single vector from each direction was then chosen for the two columns of the matrix P.
The ways in which these two groups manipulated the system of equations can be leveraged to support a discussion of the characteristic polynomial and the standard manipulations used to calculate it. Specifically, it is helpful to juxtapose the two systems of equations in Fig. 8a with the matrix equations \(\left[ {\begin{array}{*{20}c} 7 & { - 2} \\ 4 & 1 \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} a \\ b \\ \end{array} } \right] = k\left[ {\begin{array}{*{20}c} a \\ b \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} {7 - k} & { - 2} \\ 4 & {1 - k} \\ \end{array} } \right]\left[ {\begin{array}{*{20}c} a \\ b \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 0 \\ 0 \\ \end{array} } \right]\), as well as the more generalized equations \(A\vec{x} = k\vec{x}\) and \(\left( {A - kI} \right)\vec{x} = \vec{0}\). We have found that this helps students to draw parallels between the three pairs of symbolizations so that each can be used to make sense of the other.
Furthermore, the instructor can draw on the Invertible Matrix Theorem to motivate the need to calculate \(\det \left( {A - kI} \right)\) and, in so doing, introduce the notion of the characteristic polynomial. Such a discussion would begin with the instructor pointing out (or supporting students to identify) the need for a nonzero vector as a solution to the original eigen equation and therefore to the equation \(\left( {A - kI} \right)\vec{x} = \vec{0}\). Students can then use their knowledge of the equivalences in the Invertible Matrix Theorem to discuss in class the properties of A − kI needed for \(\left( {A - kI} \right)\vec{x} = \vec{0}\) to have a nonzero solution. As part of this review, students should see that one such property is \(\det \left( {A - kI} \right) = 0\). The instructor can help students to see that the equation \(\det \left( {A - kI} \right) = 0\) is in fact the equation (or a variation of the equation) that they have already used to calculate the stretch directions. In telling the students that the name of this equation is the “characteristic equation”, the instructor serves as a broker connecting the students’ mathematics to the mathematical terminology used by the larger mathematics community (Rasmussen, Zandieh, & Wawro, 2009). More generally the instructor may choose to leverage the student work to make connections to the derivation of the standard method for calculating eigenvalues and eigenvectors through the equation \(\left( {A - kI} \right)\vec{x} = \vec{0}\).
Another method for solving this problem is to find the stretch directions first. Figure 9a, b show one group’s work, which we have separated into two images. As with the other groups, this group began with the mtv = stv equation and used it to generate a system of equations. However, in each equation of the system, they solved for the stretch factor, k, and set the remaining algebraic statements equal to each other in an equation that reflects a proportion. The group then simplified this equation to yield a quadratic in two variables: 4a 2 − 6ab + 2b 2 = 0. Factoring this and drawing on the zero product property, the group was able to produce the two equations b = 2a and b = a, which they recognized as the stretch directions. Following this, the group found the corresponding stretch factors by selecting a single vector along each stretch direction and continuing in a manner similar to their approach to Problem 1.

Student response to Problem 3 that uses mtv = stv approach
Although the first two approaches are much more common, Fig. 10 illustrates a unique approach that also incorporates the equation AP = PD, derived from the equation A = PDP −1. The students’ work is difficult to parse because the students did not show all of their work or denote implications. However, we can tell that the group began by generating a generic system of equations from the matrix with unknown stretch direction vectors and stretch factors (Fig. 10a). With this system, the group was able to combine the two equations and factor the resulting equation to yield 3(x − y) = c(x − y). The group then canceled the binomial (x − y) from each side of the equation to produce c = 3. Although it is not written on their whiteboard, this last step tacitly assumes that x − y ≠ 0.

Group solution using a system of equations and AP = PD to finish Problem 3
Another aspect of the work in Fig. 10a is that it can be generalized to an interesting fact about eigenvalues of 2 × 2 matrices. That is, if the column entries add to the same number or (as in this case) subtract to opposite numbers then this number (or one of the opposite numbers) will be an eigenvalue of the matrix. For instance, in this case, the columns of the given matrix subtract to give \(7 - 4 = 3\) and \(- 2 - \left( { - 1} \right) = - 3\), yielding an eigenvalue of 3. Although students who develop this approach will likely not try to generalize this fact, it might be helpful for instructors to ask students to develop arguments for or against the generalizability of this pattern.
In their work, the students interpreted c = 3 as the first of two stretch factors, which they represented with the diagonal matrix \(\left[ {\begin{array}{*{20}c} 3 & 0 \\ 0 & d \\ \end{array} } \right]\) in the matrix equation AP = PD (Fig. 10d). The students in this group also generated another equation from the system by substituting for c to generate \(4x + y = y\left( {\frac{7x - 2y}{x}} \right)\), which could then be simplified (Fig. 10b). After substituting, the students were able to generate the quadratic equation y 2 = 3xy − 2x 2.
Importantly, because of the students’ prior work solving for stretch directions and stretch factors, they recognized that the solutions to this quadratic correspond to the components of the vector \(\left[ {\begin{array}{*{20}c} x \\ y \\ \end{array} } \right]\), representing the stretch directions of the transformation. Furthermore, the students realized that, with stretch direction vectors, the ratio of the components is important, rather than a specific value for x and y. This understanding is reflected in the group’s substitution of 1 for y to produce the equation 1 = 3x − 2x 2, which the students are able to solve more readily as a quadratic in one variable (x = 1 or ½). The group then interpreted the solutions of this quadratic equation as x components in vectors with 1 in the y component (Fig. 10c) and, more generally, as a ratio between x and y. Although there is no written evidence that the group was aware of the implications, they chose a nonzero y-value in the stretch direction vector. Their interpretation of these solutions is shown in Fig. 10d where they substituted the vectors \(\left[ {\begin{array}{*{20}c} 1 \\ 2 \\ \end{array} } \right]\) and \(\left[ {\begin{array}{*{20}c} 1 \\ 1 \\ \end{array} } \right]\) into the columns of the P matrix in the equation AP = PD. In this last step, the students used this explicit form of the AP = PD equation to solve for the remaining stretch factor of 5.
Students might not recognize that this approach would not generalize to matrices with stretch directions that align with standard basis vectors—specifically eigenvectors that have zero in the component that the students set equal to 1. This being said, the approach reflects an understanding that the stretch directions are proportion-based, rather than fixed vectors. Although this group’s approach is not as common as others, we find value in the types of conversations that such work can introduce into whole-class discussion. We also value the diversity in student approaches, whether they find the stretch factors first, the stretch directions first, or some combination of the two.
4 Concluding Remarks
In this chapter, we have delineated the usefulness of student fluidity between the eigen-equation in the various forms of matrix equations, systems of linear equations, and the equation \(A\vec{x} = \lambda \vec{x}\). The tasks in Unit 3 were developed in such a way as to build and extend work that students have previously done with \(A\vec{x} = \vec{b}\) equations and their various equivalent forms. The examples of student responses to the three problems in Unit 3 Task 3 that we provided in this chapter illustrate several important types of reasoning that support a robust understanding of eigentheory. Specifically, the task allows students to leverage their existing ways of representing linear transformations with matrix equations composed of numbers and variables—what we have denoted as mtv = stv or mtv = v equations. Students are then able to interpret these matrix equations as systems of equations in order to shift their reasoning towards developing approaches to solving equations of the form \(A\vec{x} = k\vec{x}\). As the task progresses, each subsequent problem varies which of the three components (eigenvector, eigenvalue or both) are unknown. This was designed intentionally to allow students to interpret the outcome of their activity in terms of stretch directions and stretch factors based on their work on the previous problem, as well as in Unit 3 Tasks 1–2. In this way, the students’ work with Unit 3 Task 3 is meant to involve referential activity, a key component of the instructional design theory of Realistic Mathematics Education (Gravemeijer, 1999).
Unit 3 Task 3 culminates in the instructor leveraging students’ solutions to Problem 3 and generalizing their use of the mtv = stv and mtv = v equations. In addition, the students we have worked with have begun to generalize the various relationships in the eigen-equation beyond the specific 2 × 2 examples of the task. This is meant to lead to an introduction and discussion of the characteristic polynomial, with its standard derivation resulting directly from generalizing activity. Furthermore, the instructor plays a crucial role as broker between the classroom and broader mathematical community by connecting students’ work with stretch factors and stretch directions with the more widely known terms of eigenvalues and eigenvectors, respectively. Through this discussion, students’ activity is guided toward a reinvention of eigentheory from a meaningful, problem-based approach.
References
Andrews-Larson, C., Wawro, M., & Zandieh, M. (2017). A hypothetical learning trajectory for conceptualizing matrices as linear transformations. International Journal of Mathematical Education in Science and Technology, 1–21. https://doi.org//10.1080/0020739X.2016.1276225.
Freudenthal, H. (1991). Revisiting mathematics education. Dordrecht: Kluwer Academic Publishers.
Gol Tabaghi, S., & Sinclair, N. (2013). Using dynamic geometry software to explore eigenvectors: The emergence of dynamic-synthetic-geometric thinking. Technology, Knowledge and Learning, 18(3), 149–164.
Gravemeijer, K. (1999). How emergent models may foster the constitution of formal mathematics. Mathematical Thinking and Learning, 1, 155–177.
Henderson, F., Rasmussen, C., Zandieh, M., Wawro, M., & Sweeney, G. (2010). Symbol sense in linear algebra: A start toward eigen theory. Proceedings of the 13th Annual Conference on Research in Undergraduate Mathematics Education. Raleigh, N.C. Retrieved from: http://sigmaa.maa.org/rume/crume2010.
Larson, C., Zandieh, M, Rasmussen, C., & Henderson, F. (2009). Student Interpretations of the Equal Sign in Matrix Equations: The Case of Ax = 2x. Proceedings for the Twelfth Conference On Research In Undergraduate Mathematics Education.
Larson, C., & Zandieh, M. (2013). Three interpretations of the matrix equation Ax = b. For the Learning of Mathematics, 33(2), 11–17.
Rasmussen, C., Zandieh, M., & Wawro, M. (2009). How do you know which way the arrows go? The emergence and brokering of a classroom mathematics practice. In W.M. Roth (Ed.), Mathematical representation at the interface of body and culture (pp. 171–218). Charlotte, NC: Information Age Publishing.
Salgado, H., & Trigueros, M. (2015). Teaching eigenvalues and eigenvectors using models and APOS Theory. The Journal of Mathematical Behavior, 39, 100–120.
Sinclair, N., & Gol Tabaghi, S. (2010). Drawing space: Mathematicians’ kinetic conceptions of eigenvectors. Educational Studies in Mathematics, 74, 223–240.
Stewart, S. & Thomas, M. O. J. (2006). Process-object difficulties in linear algebra: Eigenvalues and eigenvectors. In Novotná, J., Moraová, H., Krátká, M. & Stehlíková, N. (Eds.), Proceedings 30th Conference of the International Group for the Psychology of Mathematics Education (Vol. 5, pp. 185–192). Prague: PME.
Thomas, M. O. J., & Stewart, S. (2011). Eigenvalues and eigenvectors: Embodied, symbolic and formal thinking. Mathematics Education Research Journal, 23(3), 275–296.
Wawro, M., Larson, C., Zandieh, M., & Rasmussen, C. (2012). A hypothetical collective progression for conceptualizing matrices as linear transformations. In S. Brown, S. Larsen, K. Marrongelle, and M. Oehrtman (Eds.), Proceedings of the 15th Annual Conference on Research in Undergraduate Mathematics Education (pp. 1-465–1-479), Portland, OR.
Wawro, M., Rasmussen, C., Zandieh, M., & Larson, C. (2013). Design research within undergraduate mathematics education: An example from introductory linear algebra. In T. Plomp & N. Nieveen (Eds.), Educational design research—Part B: Illustrative cases (pp. 905–925). Enschede: SLO.
Wawro, M., Rasmussen, C., Zandieh, M., Sweeney, G. F., & Larson, C. (2012). An inquiry-oriented approach to span and linear independence: The case of the magic carpet ride sequence. PRIMUS: Problems, Resources, and Issues in Mathematics Undergraduate Studies, 22(8), 577–599. https://doi.org//10.1080/10511970.2012.667516.
Zandieh, M., Wawro, M., & Rasmussen, C. (2017). An Example of Inquiry in Linear Algebra: The Roles of Symbolizing and Brokering, PRIMUS: Problems, Resources, and Issues in Mathematics Undergraduate Studies, 27(1), 96–124. https://doi.org//10.1080/10511970.2016.1199618.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

Cite this chapter
Plaxco, D., Zandieh, M., Wawro, M. (2018). Stretch Directions and Stretch Factors: A Sequence Intended to Support Guided Reinvention of Eigenvector and Eigenvalue. In: Stewart, S., Andrews-Larson, C., Berman, A., Zandieh, M. (eds) Challenges and Strategies in Teaching Linear Algebra. ICME-13 Monographs. Springer, Cham. https://doi.org/10.1007/978-3-319-66811-6_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-66811-6_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-66810-9
Online ISBN: 978-3-319-66811-6
eBook Packages: EducationEducation (R0)