
Abstract
Objective: Practical deficiencies related to conventional transcranial Doppler (TCD) sonography have restricted its use and applicability. This work seeks to mitigate several such constraints through the development of a wearable, electronically steered TCD velocimetry system, which enables noninvasive measurement of cerebral blood flow velocity (CBFV) for monitoring applications with limited operator interaction.
Materials and Methods: A highly-compact, discrete prototype system was designed and experimentally validated through flow phantom and preliminary human subject testing. The prototype system incorporates a custom two-dimensional transducer array and multi-channel transceiver electronics, thereby facilitating acoustic beamformation via phased array operation. Electronic steering of acoustic energy enables algorithmic system controls to map Doppler power throughout the tissue volume of interest and localize regions of maximal flow. Multi-focal reception permits dynamic vessel position tracking and simultaneous flow velocimetry over the time-course of monitoring.
Results: Experimental flow phantom testing yielded high correlation with concurrent flowmeter recordings across the expected range of physiological flow velocities. Doppler power mapping has been validated in both flow phantom and preliminary human subject testing, resulting in average vessel location mapping times <14 s. Dynamic vessel tracking has been realized in both flow phantom and preliminary human subject testing.
Conclusions: A wearable prototype CBFV measurement system capable of autonomous vessel search and tracking has been presented. Although flow phantom and preliminary human validation show promise, further human subject testing is necessary to compare velocimetry data against existing commercial TCD systems. Additional human subject testing must also verify acceptable vessel search and tracking performance under a variety of subject populations and motion dynamics—such as head movement and ambulation.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
Introduction
Transcranial Doppler (TCD) sonography is a specialized Doppler ultrasound technique that enables the measurement of cerebral blood flow velocity (CBFV) from the basal intracerebral vessels. The use of TCD sonography is highly compelling as a cerebrovascular diagnostic modality because of its safety in prolonged studies, high temporal resolution, and relative portability. Although TCD sonography has been clinically indicated in a variety of neurovascular diagnostic applications [1], general acceptance of conventional TCD methods by the medical community has been impeded by several critical limitations—including the need for a highly-trained TCD operator, operator-dependent measurement results, and severe patient movement restrictions [2].
This work seeks to address these concerns through the development of a wearable TCD system with algorithmic steering capabilities. The wearable prototype form factor alleviates certain movement-related constraints particular to existing cart-based TCD systems, permitting applications requiring extended monitoring (e.g., emboli detection) [3]. Algorithmic vessel location and tracking can further reduce operator dependencies by both expediting and systematizing vessel location and identification procedures and by continuously updating acoustic focusing to regions of maximal flow, thereby ensuring measurement integrity. Additionally, autonomous operation can potentially lessen patient movement restrictions through a reduction in operator engagement and an increase in motion tolerance. Such capabilities eliminate the need for fine manual transducer adjustment and allow for an expansion of TCD measurement applications.
Materials and Methods
Recent advances in ultrasound electronics have led to substantial decreases in instrumentation dimensions. This work extends such reductions to a wearable form factor by identifying the anatomic, acoustic, and algorithmic constraints relevant to portable TCD sonography [4, 5].
To facilitate development and limit system complexity, this work concentrates on unilateral transtemporal acoustic window (TAW) insonation of the middle cerebral artery (MCA) for velocimetry applications. Of the major cerebral vessels, insonation and spectral Doppler (i.e., non-imaging) identification of the MCA through the TAW is generally the most straightforward due to favorable anatomical structure. The MCA is a high flow velocity, relatively large diameter cerebral vessel with approximately lateral course (i.e., normal to skull surface). TAW insonation of the ipsilateral MCA typically results in moderate insonation depths with modest steering and Doppler angles.
By restricting maximum steering angles and neglecting sonographic imaging requirements, electronic channel and transducer element count remain manageable without significant degradation in system performance. For azimuth and elevation steering angles less than ±17°, the 64 channel prototype device of this work maintains an acoustic focal intensity above the maximum on-axis intensity of an unfocused single element transducer at an equal acoustic output power. Grating lobes are generated by the relatively large transducer element pitch (1.6 mm ≈ 2λ), which produce spatial aliasing that may alter perceived volumetric position and combine backscattering from multiple regions at the same depth. These effects, however, have minimal influence on the accuracy of MCA spectral envelope generation when the MCA is the dominant source of positive volumetric flow at the depth of interest.
The discrete prototype electronic system has dimensions of 16.5 × 14 × 2.5 cm and is worn at the chest. The transducer array is affixed at the temporal region with an adjustable headframe. A block diagram of the discrete prototype system is presented Fig. 1.

Discrete prototype hardware block diagram
Beamforming is achieved on transmit and receive through timing delays at each channel. Delays are discretized to 31 ns, resulting in phase resolution of 22.5° at the 2 MHz carrier frequency and steering angle resolution of approximately 1.5°. Following initialization, the prototype system controls define a coarse volumetric grid over the entire volume of interest and scan each coarse grid location for the specified dwell period (10–20 ms). Each grid location is characterized by the relative Doppler power ratio P rel acquired over the dwell duration:
where X[n,λ) is the time-dependent discrete Fourier transform of the baseband receive waveform x[n] after clutter reject filtering, as described in [5, 6]. For unidirectional positive flow, spectral power at positive frequencies (0 < ω < π) greatly exceeds spectral power at negative frequencies (π < ω < 2π), yielding large values of P rel (~5–100). Because a simultaneous ratio of powers is employed, P rel values can be equitably compared without accounting for focal depth, acoustic attenuation and reflection, transducer beam pattern, transmit power level, and tissue backscattering coefficient.
For MCA localization, the search region extent is confined to −15 to +15 mm in both lateral dimensions and 40–65 mm in depth. A pulse repetition rate of 10 kHz with a 192 sample dwell period results in coarse search times of approximately 12 s—including communication overhead. For coarse grid locations yielding a Doppler power ratio above a specified threshold value, a subsampled local grid is defined and the dwell process repeated. The Doppler mapping procedure returns the location corresponding to maximal Doppler power ratio following local subsampling and redundancy checks. Because the MCA is generally the dominant source of positive flow within the search region, the search process nominally infers a suitable focal location for MCA velocimetry.
Vessel tracking is a continuous background process that defines a secondary receive focus. Tracking steers the secondary receive focus at offsets from the common transmit focus and compares the Doppler power ratio of the primary and secondary receive paths. Multiple range gates are added to the secondary receive path to increase effective tracking volume coverage. When the Doppler power ratio in the secondary path exceeds that of the primary velocimetry path for sufficient duration, the common transmit and primary receive focal points are updated. This process allows the system to track relative vessel motion simultaneous to CBFV measurement. Limitations in tracking robustness are highly dependent on both transmit 3 dB beamwidth at the depth of interest (≈2–4 mm) and relative vessel movement dynamics. If vessel tracking fails to maintain sufficient Doppler power ratio, the mapping search process is repeated until a suitable vessel segment is found.
Results
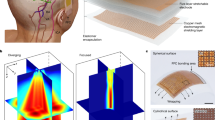
Velocimetry data from the prototype TCD system was validated on a Doppler flow phantom. Accurate flow velocity measurements were achieved over the expected range of physiological CBFV values (25 cm/s to 125 cm/s), yielding a normalized root-mean-square error < 3.0%, with a mean error of −1.7 cm/s and a standard deviation of the error of 2.4 cm/s. Figure 2a presents human subject test data from the vessel search procedure, where Doppler power ratio is measured throughout the search volume. Following Doppler power maximization, the system computes the spectrogram and spectral envelope, as shown in Fig. 2b. Under this procedure, operator interaction is limited to placement of the transducer array at the TAW via palpation; translation and angulation of the transducer array after placement is not required.

(a) Spatial variation of transcranial Doppler power ratio via coarse mapping. (b) Transcranial spectrogram at the algorithmically located Doppler power ratio maxima
Discussion
Flow phantom experiments have demonstrated accurate velocimetry operation of the prototype system. Such measurement conditions, however, differ significantly from human subject receive signal levels—due primarily to excessive acoustic attenuation and reflection introduced by cranial bone and minimal erythrocytic backscattering. Results from initial human subject testing are encouraging, but additional human testing is necessary to validate the system across a breadth of subjects and measurement environments.
Doppler mapping techniques have exhibited utility in determining suitable focal locations for flow velocimetry—a tedious manual process under conventional TCD techniques. The codification of vessel search and identification through algorithmic procedures may yield a reduction in inter-operator and intra-operator variability.
Although operator interaction with the TCD sonography system during monitoring may be significantly mitigated through the use of algorithmic control, operator proficiency remains essential in determining TAW location. Improvements in acoustic window detection techniques are needed to further reduce necessary TCD operator qualifications.
Conclusions
Enabling technological advancements and a changing atmosphere toward point-of-care testing and mobile health paradigms has stimulated interest in portable, non-invasive, and highly usable tools for cerebrovascular monitoring and diagnostics. Preliminary human validation demonstrates a compact, wearable, and algorithmically steered TCD system that largely resolves several key shortcomings of established TCD measurement techniques. The successful execution of our current objectives can profoundly alter the standard clinical approach to neurovascular evaluation, especially in applications where the role of non-invasive diagnostics has not yet been clearly established (e.g., extended monitoring, emergency assessment).
References
Sloan MA, Alexandrov AV, et al. Assessment: transcranial Doppler ultrasonography report of the Therapeutics and Technology Assessment Subcommittee of the American Academy of Neurology. Neurology. 2004;62:1468–81.
Shen Q, Stuart J, Venkatesh B, Wallace J, Lipman J. Inter observer variability of the transcranial Doppler ultrasound technique: impact of lack of practice on the accuracy of measurement. J Clin Monit Comput. 1999;15:179–84.
Mackinnon AD, Aaslid R, Markus HS. Ambulatory transcranial Doppler cerebral embolic signal detection in symptomatic and asymptomatic carotid stenosis. Stroke. 2005;36:1726–30.
Mackinnon AD, Aaslid R, Markus HS. Long-term ambulatory monitoring for cerebral emboli using transcranial Doppler ultrasound. Stroke. 2004;35:73–8.
Pietrangelo SJ. An electronically steered, wearable transcranial Doppler ultrasound system. S.M. Thesis. Cambridge, MA: Massachusetts Institute of Technology; 2013.
Jensen JA. Estimation of blood velocities using ultrasound: a signal processing approach. New York: Cambridge University Press; 1996.
Conflicts of interest statement
We declare that we have no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper

Cite this paper
Pietrangelo, S.J., Lee, HS., Sodini, C.G. (2018). A Wearable Transcranial Doppler Ultrasound Phased Array System. In: Heldt, T. (eds) Intracranial Pressure & Neuromonitoring XVI. Acta Neurochirurgica Supplement, vol 126. Springer, Cham. https://doi.org/10.1007/978-3-319-65798-1_24
Download citation
DOI: https://doi.org/10.1007/978-3-319-65798-1_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65797-4
Online ISBN: 978-3-319-65798-1
eBook Packages: MedicineMedicine (R0)