
Abstract
Most event recognition approaches in sensor environments are based on manually constructed patterns for detecting events, and lack the ability to learn relational structures in the presence of uncertainty. We describe the application of \(\mathtt {OSL}\alpha \), an online structure learner for Markov Logic Networks that exploits Event Calculus axiomatizations, to event recognition for traffic management. Our empirical evaluation is based on large volumes of real sensor data, as well as synthetic data generated by a professional traffic micro-simulator. The experimental results demonstrate that \(\mathtt {OSL}\alpha \) can effectively learn traffic congestion definitions and, in some cases, outperform rules constructed by human experts.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Many real-world applications are characterized by both uncertainty and relational structure. Regularities in these domains are hard to identify manually, and thus automatically learning them from data is desirable. One framework that concerns the induction of probabilistic knowledge by combining the powers of logic and probability is Markov Logic Networks (MLNs) [12]. Structure learning approaches that focus on MLNs have been successfully applied to a variety of applications where uncertainty holds. However, most of these approaches are batch and cannot handle large training sets, due to their requirement to load all data in memory for inference in each learning iteration.
Recently, we proposed the \(\mathtt {OSL}\alpha \) [9] online structure learner for MLNs, which extends OSL [7] by exploiting a given background knowledge to effectively constrain the space of possible structures during learning. The space is constrained subject to the characteristics imposed by the rules governing a specific task, herein stated as axioms. As a background knowledge we are employing \(\mathtt {MLN}{\!-\!}\mathtt {EC}\) [14], a probabilistic variant of the Event Calculus [8, 10] for event recognition.
In event recognition [1, 3] the goal is to recognize composite events (CE) of interest given an input stream of simple derived events (SDEs). CEs can be defined as relational structures over sub-events, either CEs or SDEs, and capture the knowledge of a target application. Due to the dynamic nature of real-world applications, the CE definitions may need to be refined over time or the current knowledge may need to be enhanced with new definitions. Manual curation of event definitions is a tedious and cumbersome process, and thus machine learning techniques to automatically derive the definitions are essential.
We applied \(\mathtt {OSL}\alpha \) to learning definitions for traffic incidents using over 3 GiB of real data from sensors mounted on a 12 Km stretch of the Grenoble ring road, provided in the context of the SPEEDD projectFootnote 1. The goal of SPEEDD is to develop a system for proactive, event-based decision-making, where decisions are triggered by forecast events. To allow for event recognition and forecasting, \(\mathtt {OSL}\alpha \) is employed to construct and refine the necessary CE definitions. Due to the high volume of the dataset, the learning process must employ an online strategy. To evaluate further the predictive accuracy of \(\mathtt {OSL}\alpha \), we employed a synthetic dataset generated by a professional traffic micro-simulator [13], developed by domain experts to allow for the systematic testing of the SPEEDD components.
The remainder of the paper is organized as follows. Section 2 presents \(\mathtt {OSL}\alpha \), while Sect. 3 describes the application of \(\mathtt {OSL}\alpha \) to the traffic domain. Section 4 summarizes the presented work and outlines further research directions.
2 \(\mathtt {OSL}\alpha \): An Online Structure Learner Using Background Knowledge Axiomatization
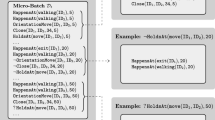
\(\mathtt {OSL}\alpha \) extends OSL by exploiting a given background knowledge. Figure 1 presents the components of \(\mathtt {OSL}\alpha \). The background knowledge consists of the \(\mathtt {MLN}{\!-\!}\mathtt {EC}\) axioms (i.e., domain-independent rules) and an already known (possibly empty) hypothesis (i.e., set of clauses). Each axiom contains query predicates \(\mathtt {HoldsAt}\in \mathcal {Q}\) that consist the supervision, and template predicates \(\mathtt {InitiatedAt}\), \(\mathtt {TerminatedAt}\in \mathcal {P}\) that specify the conditions under which a CE starts and stops being recognized. The latter form the target CE definitions that we want to learn. \(\mathtt {OSL}\alpha \) exploits these axioms in order to create mappings of supervision predicates into template predicates and search only for explanations of these template predicates. Upon doing so, \(\mathtt {OSL}\alpha \) does not need to search over time sequences; instead it only needs to find appropriate bodies over the current time-point for the following definite clauses:

Given the \(\mathtt {MLN}{\!-\!}\mathtt {EC}\) axioms, \(\mathtt {OSL}\alpha \) constructs a set \(\mathbf {T}\) that provides mappings of its axioms to the template predicates in \(\mathcal {P}\) that appear in their bodies. For instance, axiom (1) of \(\mathbf {T}\)

will be mapped to the template predicate \(\mathtt {InitiatedAt}(f,t)\) since the aim is to construct a rule for this predicate. The set \(\mathbf {T}\) is used during the search for structures (relational pathfinding) to find an initial search set \(\mathcal {I}\) of ground template predicates, and search the space of possible structures for specific bodies of the definite clauses.
At any step t of the online procedure, a training example (micro-batch)  arrives containing simple derived events (SDEs), e.g. a fast lane in a highway has average speed less than 25 km/h and sensor occupancy greater than \(55\%\).
arrives containing simple derived events (SDEs), e.g. a fast lane in a highway has average speed less than 25 km/h and sensor occupancy greater than \(55\%\).  is used together with the already learnt hypothesis to predict the truth values \(\mathbf {y}_t^P\) of the composite events (CEs) of interest. This is achieved by (maximum a posteriori) MAP inference based on LP-relaxed Integer Linear Programming [6]. Then \(\mathtt {OSL}\alpha \) receives the true label \(\mathbf {y}_t\) and finds all ground atoms that are in \(\mathbf {y}_t\) but not in \(\mathbf {y}_t^P\), denoted as \(\varDelta \mathbf {y}_t = \mathbf {y}_t{\setminus } \mathbf {y}_t^P\). Hence, \(\varDelta \mathbf {y}_t\) contains the false positives/negatives of the inference step. Given
is used together with the already learnt hypothesis to predict the truth values \(\mathbf {y}_t^P\) of the composite events (CEs) of interest. This is achieved by (maximum a posteriori) MAP inference based on LP-relaxed Integer Linear Programming [6]. Then \(\mathtt {OSL}\alpha \) receives the true label \(\mathbf {y}_t\) and finds all ground atoms that are in \(\mathbf {y}_t\) but not in \(\mathbf {y}_t^P\), denoted as \(\varDelta \mathbf {y}_t = \mathbf {y}_t{\setminus } \mathbf {y}_t^P\). Hence, \(\varDelta \mathbf {y}_t\) contains the false positives/negatives of the inference step. Given  , \(\mathtt {OSL}\alpha \) constructs a hypergraph that represents the space of possible structures as graph paths. Constants appear in the graph as nodes and true ground atoms as hyperedges that connect the nodes appearing as its arguments.
, \(\mathtt {OSL}\alpha \) constructs a hypergraph that represents the space of possible structures as graph paths. Constants appear in the graph as nodes and true ground atoms as hyperedges that connect the nodes appearing as its arguments.

The procedure of \(\mathtt {OSL}\alpha \).
Then for all incorrectly predicted CEs in \(\varDelta \mathbf {y}_t\), \(\mathtt {OSL}\alpha \) uses the set \(\mathbf {T}\) to find the corresponding ground template predicates for which the axioms belonging in \(\mathbf {T}\) are satisfied by the current training example. Consider, for instance, that one of these is axiom (1), and that we have predicted that the ground atom  is false (false negative). \(\mathtt {OSL}\alpha \) substitutes the constants of
is false (false negative). \(\mathtt {OSL}\alpha \) substitutes the constants of  into axiom (1). The result of the substitution will be the following partially ground axiom:
into axiom (1). The result of the substitution will be the following partially ground axiom:

Since t represents time-points and \(\mathtt {Next}\) describes successive time-points, there will be only one true grounding of  in the training data, having as argument the constant \(\mathtt {4}\). \(\mathtt {OSL}\alpha \) substitutes the constant \(\mathtt {4}\) into axiom (2) and adds
in the training data, having as argument the constant \(\mathtt {4}\). \(\mathtt {OSL}\alpha \) substitutes the constant \(\mathtt {4}\) into axiom (2) and adds  to the initial search set \(\mathcal {I}\). This procedure essentially reduces the hypergraph to contain only ground atoms explaining the template predicates. The pruning resulting from the template guided search is essential for learning in temporal domains.
to the initial search set \(\mathcal {I}\). This procedure essentially reduces the hypergraph to contain only ground atoms explaining the template predicates. The pruning resulting from the template guided search is essential for learning in temporal domains.
For all ground template predicate in \(\mathcal {I}\), the hypergraph is searched, guided by path mode declarations [7] using relational pathfinding [11] up to a predefined length, for definite clauses explaining the CEs. The search procedure recursively adds to the path hyperedges (i.e., ground atoms) that satisfy the mode declarations. The search ends when the path reaches the specified length or when no new hyperedges can be added.
The paths discovered during the search correspond to conjunctions of true ground atoms connected by their arguments and can be generalized into definite clauses by replacing constants in the conjunction with variables. Then, these conjunctions are used as a \(\mathrm {body}\) to form definite clauses using as head the template predicate present in each path. The resulting set of formulas is converted into clausal normal form and evaluated.
Evaluation takes place for each clause c individually. The difference between the number of true groundings of c in the ground-truth world \((\mathbf {x}_t,\mathbf {y}_t)\) and those in predicted world \((\mathbf {x}_t,\mathbf {y}_t^P)\) is then computed (note that \(\mathbf {y}_t^P\) was predicted without c). Only clauses whose difference in the number of groundings is greater than or equal to a predefined threshold \(\mu \) will be added to the MLN:
The intuition behind this measure is to add to the hypothesis clauses whose coverage of the ground-truth world is significantly (according to \(\mu \)) greater than that of the clauses already learned. Finally, the weights of the retained clauses are then optimized by the AdaGrad online learner [5], the weighted clauses are appended to the current hypothesis  , and the procedure is repeated for the next training example
, and the procedure is repeated for the next training example  .
.
Our implementations of \(\mathtt {OSL}\alpha \), AdaGrad, and MAP inference based on LP-relaxed Integer Linear Programming, are contributed to LoMRFFootnote 2, an open-source implementation of MLNs written in Scala. LoMRF enables knowledge base compilation, parallel and optimized grounding, inference and learning.
3 Empirical Evaluation
We applied \(\mathtt {OSL}\alpha \) to traffic management using real data from magnetic sensors mounted on the southern part of the Grenoble ring road (Rocade Sud), that links the city of Grenoble from the south-west to the north-east. In addition to sustaining local traffic, this road has a major role, since it connects two highways: the A480, which goes from Paris and Lyon to Marseilles, and the A41, which goes from Grenoble to Switzerland. Furthermore, the mountains surrounding Grenoble prevent the development of new roads, and also have a negative impact on pollution dispersion, making the problem of traffic regulation on this road even more crucial [4]. The dataset was made available by CNRS-Grenoble, our partner in the SPEEDD project, and consists of approximately 3.3 GiB of sensor readings (one month data). Sensors are placed in 19 collection points along a 12 km stretch of the highway. Each collection point has a sensor per lane. Sensor data are collected every 15 s, recording the total number of vehicles passing through a lane, average speed and sensor occupancy. Annotations of traffic congestion are provided by human traffic controllers, but only very sparsely.
To deal with this issue, and test further \(\mathtt {OSL}\alpha \), we used a synthetic dataset generated by a professional traffic micro-simulator [13], developed in the context of SPEEDD. The simulator is based on AIMSUNFootnote 3 — a widely used transport modeling software that uses a microscopic model simulating individual vehicle movement, based on statistical laws from car-following and lane-changing theories. Typically, vehicles enter a transportation network using a statistical distribution of arrivals. The microscopic model incorporates sub-models for acceleration, speed adaptation, lane-changing, etc., to describe how vehicles move, interact with each other and the infrastructure. The synthetic dataset concerns the same location — the Rocade Sud — and consists of 6 simulations of one hour each (\({\approx }18.6\) MiB). The simulator has been calibrated using real traffic data. Unlike the real dataset, artificial sensors exist in 98 collection points of the highway, there is no distinction between (fast, queue, etc.) lanes, and sensor measurements additionally include vehicle density. Furthermore, the synthetic dataset is much better annotated than the real dataset.
3.1 Learning Challenges
Both datasets used for learning traffic congestions exhibit several challenges. Concerning the real dataset, the first challenge is its size, making the use of batch learners, as well as online learners such as OSL that cannot make use of background knowledge, prohibitive. For instance, in the empirical evaluation presented in [9], OSL was tested on a much smaller training set (\({\approx }2.6\) MiB) and required \({\approx }25\) h to process just 40% of the data. Second, as mentioned above, traffic congestion annotation is largely incomplete, leading to the incorrect penalization of good rules. This issue is illustrated in Fig. 2.
Third, the quality of information of each sensor differs considerably. This issue is illustrated in Fig. 3, that displays the average speed of the fast lane and the queue lane at the same location, as well as the congestion annotation. Figure 3 shows that the information provided by the sensors of the queue lane is largely uninformative.

Location 353708, fast lane: average speed (left) and occupancy (right). The blue points indicate the average speed (occupancy), the green windows indicate the congestion annotated by human experts, and red (dashed) windows the potentially missing annotations. (Color figure online)

Location 347549: fast lane (left) vs queue lane (right). The blue points indicate the average speed while green windows indicate the congestion annotated by human experts. (Color figure online)
Fourth, generic, location- and lane-agnostic rules are not sufficient. Consider, for example, a simple rule defining traffic congestion for any possible location regardless of the lane type:

According to the above rule, a congestion in some location is said to be initiated if the average speed is below 50 km/h and the occupancy is greater than 25%. Similar rules, not shown here to save space, terminate the recognition of congestion. The optimization of the weights of these rules had large fluctuations along the learning steps, leading to zero crossings, indicating that the rules correctly capture the concept of traffic congestion in a few locations, and completely fail in others. To deal with this issue, location- and lane-specific rules must be constructed.
On the other hand, the synthetic dataset introduces different types of challenge. Density and occupancy measurements are mostly noisy, while there are a lot of zero values in all sensor measurements, leading to detection errors. These issues are illustrated in Fig. 4. Furthermore, although supervision is more complete compared to the real dataset, there are cases of missing annotation.

Simulation 2 at location 1320: average speed (left), occupancy (middle) and density (right). The green windows indicate the congestion supervision. (Color figure online)
3.2 Experimental Setup and Results
Sensor readings constitute the simple derived events (SDEs), while traffic congestion is the target CE. The data are stored in a PostgreSQL database and the training sequence for each micro-batch, as shown in Fig. 1, is constructed dynamically by querying the database. A set of first-order logic functions is used to discretize the numerical data (speed, occupancy) and produce input events such as, for instance,  , representing that the speed in the fast lane of location 53708 is less than 55 km/h at time 100. The CE supervision indicates when a traffic congestion holds in a specific location. Each training sequence is composed of input SDEs (\(\mathtt {HappensAt}\)) over the first-order logic functions and the corresponding CE annotations (\(\mathtt {HoldsAt}\)). The total length of the training sequence in the real data case consists of 172, 799 time-points, and we consider only SDEs from fast lanes. In the synthetic data the total training sequence length consists of 238 time-points and there is no distinction between lanes.
, representing that the speed in the fast lane of location 53708 is less than 55 km/h at time 100. The CE supervision indicates when a traffic congestion holds in a specific location. Each training sequence is composed of input SDEs (\(\mathtt {HappensAt}\)) over the first-order logic functions and the corresponding CE annotations (\(\mathtt {HoldsAt}\)). The total length of the training sequence in the real data case consists of 172, 799 time-points, and we consider only SDEs from fast lanes. In the synthetic data the total training sequence length consists of 238 time-points and there is no distinction between lanes.
In the experiments presented below, we compare:
-
\(\mathtt {OSL}\alpha \) starting with an empty hypothesis.
-
\(\mathtt {OSL}\alpha \) starting with manually constructed traffic congestion definitions developed in collaboration with domain experts.
-
The AdaGrad [5] online weight learner operating on the aforementioned hand-crafted definitions.
The evaluation results were obtained using MAP inference [6] and are presented in terms of \(F_1\) score. In the real dataset, all reported statistics are micro-averaged over the instances of recognized CEs using 10-fold cross validation over the entire dataset, using varying batch sizes. At each fold, an interval of 17, 280 time-points was left out and used for testing. In the synthetic data, the reported statistics are micro-averaged using 6-fold cross validation over 6 simulations by leaving one out for testing, using varying batch sizes. The experiments were performed on a computer with an Intel i7 4790@3.6 GHz processor (4 cores and 8 threads) and 16 GiB of RAM, running Ubuntu 16.04.

Real dataset: \(F_1\) score (left) and average batch processing time (right) for \(\mathtt {OSL}\alpha \) starting with an empty hypothesis (top), \(\mathtt {OSL}\alpha \) starting with manually constructed rules (middle) and AdaGrad operating on the manually constructed rules (bottom). In the left figures, the number of batches (see the Y axes) refers to number of learning iterations.
Real Dataset. Figure 5 presents the experimental results on the real dataset. AdaGrad and \(\mathtt {OSL}\alpha \) (when a starting with a non-empty hypothesis) were given location-specific rules defining traffic congestion in terms of speed and occupancy. The predictive accuracy of the learned models, both for \(\mathtt {OSL}\alpha \) and AdaGrad, is low. This arises mainly from the largely incomplete supervision. In \(\mathtt {OSL}\alpha \), the predictive accuracy increases (almost) monotonically as the learning iterations increase. On the contrary, the accuracy of AdaGrad is more or less constant. \(\mathtt {OSL}\alpha \), starting with or without the manually constructed rules, outperforms AdaGrad in terms of accuracy. (\(\mathtt {OSL}\alpha \) starting without (respectively with) the hand-crafted rules achieves a 0.64 (resp. 0.61) \(F_1\) score, while the best score of AdaGrad is 0.59.) This is a notable result. The aid of human knowledge can help \(\mathtt {OSL}\alpha \) — see the two middle points (batch size/learning iterations) in the two top left diagrams of Fig. 5. However, \(\mathtt {OSL}\alpha \) achieves the best score when starting with an empty hypothesis. The absence of proper supervision penalizes the hand-crafted rules, compromising the accuracy of the learning techniques that use them. \(\mathtt {OSL}\alpha \) starting with an empty hypothesis is not penalized in this way, and is able to construct rules with a better fit in the data, given enough learning iterations. For some locations of the motorway, \(\mathtt {OSL}\alpha \) has constructed rules with different thresholds for speed and occupancy than those of the hand-crafted rules.
With respect to efficiency (see the right diagrams of Fig. 5), unsurprisingly AdaGrad is faster and scales better to the increase in the batch size. At the same time, \(\mathtt {OSL}\alpha \) processes data batches efficiently — for example, \(\mathtt {OSL}\alpha \) takes less than 10 s to process a 50-minute batch including 4, 220 SDEs.
Synthetic Dataset. To test the behavior of \(\mathtt {OSL}\alpha \) under better supervision, we made use of a synthetic dataset produced by a professional traffic micro-simulator. The dataset concerns the same location: the southern part of the Grenoble ring road. Figure 6 presents the experimental results using only SDEs for average speed. As mentioned in Sect. 3.1, density and occupancy measurements are mostly noisy in the synthetic data. Consequently, AdaGrad and \(\mathtt {OSL}\alpha \) (when a starting with a non-empty hypothesis) were given rules defining traffic congestion only in terms of speed. These rules were location-agnostic since the artificial sensors do not distinguish between lanes. Not surprisingly, the predictive accuracy of the learned models in these experiments is much higher as compared to real dataset. Moreover, the accuracy of \(\mathtt {OSL}\alpha \) and AdaGrad is affected mostly by the batch size: accuracy increases as the batch size increases. The synthetic dataset is smaller than the real dataset and thus, as the batch size decreases, the number of learning iterations is not large enough to improve accuracy. The best performance of \(\mathtt {OSL}\alpha \) and AdaGrad is almost the same (approximately 0.89). In other words, \(\mathtt {OSL}\alpha \) starting with an empty hypothesis can match the performance of techniques taking advantage of rules crafted by human experts. This is another notable result.
The right diagrams of Fig. 6 report the average batch processing times. These diagrams verify that AdaGrad is more efficient than \(\mathtt {OSL}\alpha \), and that \(\mathtt {OSL}\alpha \) achieves a good performance, processing batches much faster than their duration. For example, \(\mathtt {OSL}\alpha \) takes less than 3 s to process a 25-minute batch.

Synthetic dataset with speed measurements: \(F_1\) score (left) and average batch processing time (right) for \(\mathtt {OSL}\alpha \) starting with an empty hypothesis (top), \(\mathtt {OSL}\alpha \) starting with manually constructed rules (middle) and AdaGrad operating on the manually constructed rules (bottom).
To evaluate further the behavior of \(\mathtt {OSL}\alpha \), we performed additional experiments using the synthetic dataset, this time keeping the noisy occupancy measurements. The aim of the experiments was to test \(\mathtt {OSL}\alpha \) in a well-annotated setting with noisy SDEs. The evaluation results are shown in Fig. 7. The hand-crafted rules defining traffic congestion combined speed with occupancy. Figure 7 shows that the noisy occupancy readings have affected the accuracy of \(\mathtt {OSL}\alpha \) and AdaGrad. However, \(\mathtt {OSL}\alpha \) starting with the manually constructed rules is affected much less, outperforming significantly both \(\mathtt {OSL}\alpha \) starting with an empty hypothesis and AdaGrad. \(\mathtt {OSL}\alpha \) has augmented the hand-crafted rules with additional clauses that focus on speed, and reduced the weight values of rules combining speed with occupancy. This way, \(\mathtt {OSL}\alpha \) was able to minimize the effect of noisy SDEs.
For completeness, the right diagrams of Fig. 7 report the average batch processing times of \(\mathtt {OSL}\alpha \) and AdaGrad.

Synthetic dataset with speed and occupancy measurements: \(F_1\) score (left) and average batch processing time (right) for \(\mathtt {OSL}\alpha \) starting with an empty hypothesis (top), \(\mathtt {OSL}\alpha \) starting with manually constructed rules (middle) and AdaGrad operating on the manually constructed rules (bottom).
4 Summary and Further Work
We presented the application of \(\mathtt {OSL}\alpha \), a recently proposed structure learner for Markov Logic Networks that exploits background knowledge in the form of Event Calculus theories, to complex event recognition for traffic management. We performed an extensive empirical evaluation using over 3 GiB of real data, allowing us to test the scalability of our approach, and a synthetic dataset that enabled us to test systematically the predictive accuracy of the structure learner. The experimental evaluation showed that \(\mathtt {OSL}\alpha \), without the aid of hand-crafted knowledge, performs at least as good as the AdaGrad weight learner operating on rules constructed by human experts. The aid of hand-crafted rules allows \(\mathtt {OSL}\alpha \) to outperform significantly AdaGrad in the presence of noisy SDEs. With respect to efficiency, \(\mathtt {OSL}\alpha \) processes data batches much faster than their duration.
There are several directions for further work. We aim to extend \(\mathtt {OSL}\alpha \) in order to handle effectively the absence of annotation. We are also performing a human factors evaluation involving traffic controllers — see [2] for the initial results.
References
Artikis, A., Skarlatidis, A., Portet, F., Paliouras, G.: Logic-based event recognition. Knowl. Eng. Rev. 27(4), 469–506 (2012)
Baber, C., Starke, S., Morar, N., Howes, A., Kibangou, A., Schmitt, M., Ramesh, C., Lygeros, J., Fournier, F., Artikis, A.: Deliverable 8.5 - intermediate evaluation report of SPEEDD prototype for traffic management. SPEEDD Project. http://speedd-project.eu/sites/default/files/D8.5_-_Intermediate_Evaluation_Report-revised.pdf
Cugola, G., Margara, A.: Processing flows of information: from data stream to complex event processing. ACM Comput. Surv. 44(3), 15 (2012)
de Wit, C.C., Bellicot, I., Garin, F., Grandinetti, P., Ladino, A., Singhal, R., Kibangou, A., Morbidi, F., Schmitt, M., Hempel, A., Baber, C., Cooke, N.: Deliverable 8.1 - user requirements and scenario definition. SPEEDD project. http://speedd-project.eu/sites/default/files/D8.1_User_Requirements_Traffic_updated_final.pdf
Duchi, J., Hazan, E., Singer, Y.: Adaptive subgradient methods for online learning and stochastic optimization. J. Mach. Learn. Res. 12, 2121–2159 (2011)
Huynh, T.N., Mooney, R.J.: Max-margin weight learning for Markov logic networks. In: Buntine, W., Grobelnik, M., Mladenić, D., Shawe-Taylor, J. (eds.) ECML PKDD 2009. LNCS, vol. 5781, pp. 564–579. Springer, Heidelberg (2009). doi:10.1007/978-3-642-04180-8_54
Huynh, T.N., Mooney, R.J.: Online structure learning for Markov logic networks. Proc. ECML PKDD 2, 81–96 (2011)
Kowalski, R., Sergot, M.: A logic-based calculus of events. New Gener. Comput. 4(1), 67–95 (1986)
Michelioudakis, E., Skarlatidis, A., Paliouras, G., Artikis, A.: Online structure learning using background knowledge axiomatization. Proc. ECML-PKDD 1, 237–242 (2016)
Mueller, E.T.: Event calculus. in handbook of knowledge representation. In: Foundations of Artificial Intelligence, vol. 3, pp. 671–708. Elsevier (2008)
Richards, B.L., Mooney, R.J.: Learning relations by pathfinding. In: Proceedings of AAAI, pp. 50–55. AAAI Press (1992)
Richardson, M., Domingos, P.M.: Markov logic networks. Mach. Learn. 62(1–2), 107–136 (2006)
Singhal, R., Andreev, A., Kibangou, A.: Deliverable 8.4 - final version of micro-simulator. SPEEDD project. http://speedd-project.eu/sites/default/files/SPEEDD-D8-4_Final_Version.pdf
Skarlatidis, A., Paliouras, G., Artikis, A., Vouros, G.A.: Probabilistic event calculus for event recognition. ACM Trans. Comput. Log. 16(2), 11:1–11:37 (2015)
Acknowledgments
Funded by EU FP7 project SPEEDD (619435).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Michelioudakis, E., Artikis, A., Paliouras, G. (2017). Online Structure Learning for Traffic Management. In: Cussens, J., Russo, A. (eds) Inductive Logic Programming. ILP 2016. Lecture Notes in Computer Science(), vol 10326. Springer, Cham. https://doi.org/10.1007/978-3-319-63342-8_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-63342-8_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-63341-1
Online ISBN: 978-3-319-63342-8
eBook Packages: Computer ScienceComputer Science (R0)