
Abstract
One of the main focal points in aircraft aerodynamics has been the study and development of high-lift devices and systems. These are designed in order to enable manipulation of the lifting force at various moments during flight (takeoff, cruising and landing) in such a way that the aircraft can increase or decrease the lift-to-drag ratio accordingly. High-lift systems are classified into trailing-edge and leading-edge devices. The first consists mainly of various types of flaps such as the plain flap, Fowler flap or the Krueger flap which act to increase the lifting force by reducing minimum speed, delaying flow separation or increasing the effective camber or the wing area. On the other hand, leading-edge devices consist mainly of fixed slots, movable slats, leading edge flaps or cuffs. The main idea of these devices is to sustain the lifting force even when the aircraft’s speed decreases. Nowadays, there has been increasing interest in the study of high-lift systems using Computational Fluid Dynamics (CFD), instead of the experimental techniques traditionally used. Nevertheless, CFD techniques still face some major challenges that in some cases can only be solved through experimentation.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The importance of the high-lift systems in modern transport aircraft is the significant payoff in the aircraft’s performance during take-off and landing stages. To design efficient high-lift systems, several methods have been employed; most recently, Computational Fluid Dynamics (CFD) simulations, with the rapid growth of computational capabilities, have achieved increased accuracy and reliability of their results making it a more suitable tool and complementing wind-tunnel tests. The use of numerical simulations has resulted in wing designs that enable the bearing of higher loads without reducing cruise performance.
Although, high-lift studies trace back to the late 1920s, most of those works were empirical and the experimental databases were not widely published. As a historical note, after the end of the Cold War, nations worldwide(especially NATO countries) required that military forces react quickly anywhere in the world; thus, military transport aircraft needed to be able to operate on short landing/take-off strips [1]. This demanded better designs of high-lift systems. It was not until Smith’s work in 1975 that a theoretical work published the explanations for those systems, establishing a baseline for future developments [2].
High lift-systems surfaced as a solution to reduce the extra baggage that the wing area constituted at cruising conditions, but was necessary for take-off and landing; namely flaps, slats, slots etc. Nowadays, high-lift systems are classified into two groups: leading-edge and trailing-edge devices. Trailing edge devices were the first to be developed, starting in the 1920s and 1930s. By far, the choice of wing area was established according to the speed at takeoff or landing [3]. However, the appearance of such devices provided sufficient lift while having a small wing area. The reduction in the wing area enabled designers to reduce structural weight; hence, skin- friction drag was decreased. The creation of this kind of devices had consequences in wing design and aircraft structure, therefore, also in fuel consumption, manufacturing and operational costs. Some of the standard devices employed since 1920 can be seen in Table 1, along with the respective increase in lift provided by each device.
2 Trailing Edge Devices
The first and most common high-lift system was the plain flap. Henri Farman first used this in 1908, however, engineers at the time were not interested in such devices. It was not until 1914 that they were installed in the SE-4 biplane and became standard on airplanes, built by Fairey beginning in 1916 [3]. The flaps are a movable part attached to the trailing edge of the wing. These are used to lower the minimum speed to produce sufficient lift force, such that the aircraft can fly, and also to increase the angle of deployment for takeoff and landing configurations. The plain flap is limited to a 20 degree angle of deployment that limits its capability to produce lift [4].
Three different innovators later developed the single-slotted flap independently: a German pilot G.V. Lanchman (1917), Sir Frederick Handley Page in England and an engineer working for Junkers in Germany. The principle of operation is that the high-pressure air below the wing is forced through the gap between flap and wing, delaying flow separation, while the airflow remains attached to the flap to increase lift. In the beginning, the patent was rejected with the argument that such a device could destroy the wing’s lift. However, after Prandtl at Gottingen University were convinced to perform wind-tunnel tests, it was found that lift increased by 63%, hence Lanchman got his patent and shared rights with Page. After a two-year, wind-tunnel testing program, the single-slotted flap’s viability was established beyond a doubt.
At the same time, in the US, the split flap was developed, which increased both lift and drag. The increase in drag was found beneficial during landing, resulting in a reduction of the lift-to-drag ratio, thus reducing the landing distance. This type of slat was the first type used on an airplane designed in the US, although it does not produce a significant increase in lift. The next development was the Fowler flap (see Fig. 1) by an engineer who worked with the Army Air Corps in 1924, Harlan D. Fowler. It combined two effects: The deflection of the flap was able to increase the effective camber of the wing to increasing lift. Additionally, the flap could be deployed increasing the lift by increasing the wing area. Up until 1932, the National Advisory Committee for Aeronautics (NACA) tested it, proving the value of this kind of flap. Later on, some variations of the Fowler flap were developed, such as the double-slotted Fowler flap. The single-slotted is rarely used in industry; however, the double or multiple-slotted Fowler flap are still used on modern aircraft. For instance, Boeing developed the triple-slotted Fowler flap to be used on the 727 jet transport in the 1960s. Further work resulted in the leading-edge slat and the era of leading-edge high-lift devices.

Fowler flaps
3 Leading Edge Devices
The leading-edge device is a small, highly cambered airfoil, placed on the leading edge of the airfoil, usually called a slat. This device increases the camber of the wing and slightly reduces chord; since there is a small gap between the slat and wing, it modifies the pressure distribution over the top surface of the airfoil, resulting in a higher pressure over the top surface on the main body of the wing. The most common leading edge devices are the fixed slots, movable slats, leading-edge flaps and cuffs [5]. Among them there are the rigid Kruegers and variable camber Kruegers, devices that today are used on jet transports [6].
The objective for the leading-edge design was to enable the wing to reach high angles of attack for takeoff and landing configurations. This can be achieved by providing sufficient slat-chord across the span and by defining suitable a slat placement [6].
Since 1932, NACA (today NASA) has been performing various tests in order to control the takeoff and landing configurations of aircrafts. In order to do so, the implementation of fixed slots at the leading edge of the wings was the first approach to improving the lift load on the wings [7]. This way, the lifting force could be sustained, even though the aircraft’s velocity decreased. The main issue with the slots is the fact that they remain fixed. However, the movable slats, provide the same effect as the slots; since these are able to move, the slats can change the angle of attack of the wing according to the situation (landing, takeoff or cruising). Also by separating itself from the wing, the slat configuration allows airflow such that the flow separation is delayed.
The leading-edge flaps, as well as the trailing-edge flaps, are intended to increase the camber of the wing. This in turn, leads to enforcing drastic changes in the lift-to-drag ratio. Finally, the leading-edge cuffs are intended to enforce the same effect as the flaps, however the cuffs are fixed to the wing. The main advantage of fixing the devices is primarily structural. Nevertheless, the movable devices prove to have better aerodynamic effects. As a result, small aircrafts, which are not necessarily heavily loaded, do not have the need to adapt drastically their lift-to-drag ratio and therefore tend to use fixed devices. On the other hand, larger commercial aircrafts use the movable devices in order to adapt effectively for landing and takeoffs [5].
In this regard, various studies [2, 8] show that the best results are obtained when both leading- and trailing-edge devices are used. This is what it is usually referred to as the “configuration” or the “multi-element airfoils”, which take advantage of both types of devices.
4 Physics of High-Lift Systems and Numerical Simulations
In order to understand the physical phenomena, the complex flows that take place over the wing have to be understood. Particularly in the case of high-lift systems and multi-element airfoils, this flow mixes subsonic and supersonic regimes. In 1975, Smith [2] published a large compendium of his aerodynamics lectures, where he explains the principles behind the aerodynamics of high-lift systems and provides clear insight into the fundamentals of multi-elements airfoil designs [2]. The importance of Smith’s work as a baseline for the next generation of high-lift systems is the explanation of the principle that, as the pressure splits, the flow separation over different elements is suppressed, thus, increasing the lifting force. Understanding this basic phenomenon led to the consideration of a more complex issue, namely, the behavior of viscous effects.
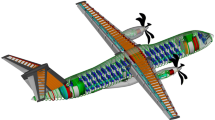
The effect of high-lift systems on the flow is depicted in Figs. 2 and 3. The multi-element airfoil shown consists of the main airfoil, the Krueger flap leading-edge and trailing-edge flap. This is the configuration of the Common Research Model designed by NASA [6]. The streamlines show the flow attached to the airfoil and over both devices, i.e., the flap and the slat.

Streamlines over a wing section of the NASA’s High-lift Common Research Model at angle of attack \(8^\circ \). Upper right: zoom-in of the slat; lower right: zoom-in of the flap
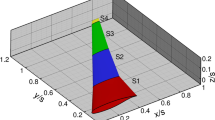
Figure 3 shows the development of the wake at various positions (15, 41, 68% and near the tip approx. 100%) over the wingspan and the effect of the trailing-edge flap delaying airflow detachment. One can observe at the root of the wing the possible interaction between the airfoil wake and the flap’s boundary layer as the wake is large and turbulent. On the other hand, towards the wingtip, the wake is shorter.

Turbulent viscosity ratio at four position over the wing span of the NASA’s CRM at angle of attack \(8^\circ \)
Flow over high-lift systems is dominated by viscous effects due to the interaction between the boundary layer from one element and the turbulent wake induced by another. Meredith listed some of the viscous phenomena present in multi-elements airfoils [9]. Boundary-layer transition, viscous-wake interactions, boundary-layer interactions and flow separation, among others, still constitute challenging issues for CFD simulations and the aerospace industry.
Preceding the current series of workshops on the matter of high-lift systems that have been organized by the American Institute of Aeronautics and Astronautics (AIAA), the High-Lift Aerodynamics Conference held in Canada was one of the first scientific meeting where CFD showed its potential to accurately capture the flow physics by solving the Navier-Stokes equations. The goals of the High-lift Prediction Workshop series’ remain similar, as it aims to improve the understanding of the physics underlying transport aircraft in high-lift stages by means of numerical computations. Additionally, it aims to assess the current CFD capabilities for predicting aerodynamic performance and to establish fundamental knowledge for numerical simulations.
During the past decade, the ability to design more efficient high-lift systems has increased. The main reason is the better understanding of the flow, thanks to the use of computational tools. However, there are still many complex issues to face, which make the simulation of aircraft by CFD computations a demanding process.
A comprehensive survey of CFD methods applied to the computation of high-lift configurations, given by Rumsey and Ying, established the challenges that CFD must confront nowadays [10]:
-
1.
Quantify what is required to accurately predict flow fields near maximum lift, using 3D CFD. To do so, advances in CFD methods, such as adaptive grid techniques and quality 3D high-lift datasets, are needed.
-
2.
The increased need to obtain more experimental database for CFD validation. This is especially important for the accurate definition of boundary conditions and for validation of the wide range of CFD codes.
-
3.
Determine the cause of slat-wake mispredictions by RANS, whose causes could be related to poor modeling of transition effects, lack of unsteady effects, neglecting 3D effects and turbulence models not capturing the relevant physics of the flow.
-
4.
Improve turbulent shear-stress predictions since they depend on the turbulence model employed. Since this relates to transition effects, the capability to accurately predict transition has to improve.
The aerospace engineering community has undertaken an effort to advance the issues listed above. Although the complexities inherent in high-lift systems remain and add a significant degree of uncertainty to the CFD computations, global variables like the surface-pressure distribution and skin-friction coefficient can be predicted with good accuracy.
More recently, in order to progress the state of the art in predicting high-lift flows, an international workshop series has been carried out. The First High-Lift Prediction Workshop (HiLiftPW-1), held in Chicago (2010), focused on the three-element NASA Trapezoidal Wing Configuration [11]. One of the main conclusions for this first version was the trend of CFD to underestimate the lift, drag and magnitude of the pitching moment [12]. The Second High-Lift Prediction Workshop (HiLiftPW-2), held in San Diego (2013), used the DLR-F11 three-element, wing-body model as the base geometry. This body was more representative of a transport aircraft configuration than the NASA Trapezoidal Wing, and there were available experimental data at low and high Reynolds numbers; this was the focus of this occurrence of the workshop. The ability to predict differences between low and high Reynolds numbers was observed in detail [13]. Likewise, the HiLiftPW-1 CFD results lacked consistency, but efforts to quantify and isolate possible causes were done, for example, to include a verification case and iterative convergence information as prerequisites for future workshops. The last occurrence, the Third High Lift Workshop (HiLiftPW-3), held in Denver (2017), posed two geometries: NASA’s High-Lift Common Research Model and the Japan Aerospace Exploration Agency (JAXA) Standard Model (JSM). Among the main conclusions were: predicting flow near maximum lift is still challenging; some participants, codes or turbulence models get better agreement but there is not a clear explanation for this; finer grids are needed when flow is separated.
References
Advisory Group for Aerospace Research and Development: High Lift Systems Aerodynamics. In: AGARD Conference Proceedings 515. Neuilly Sur Seine (1992)
Smith, A.M.O.: High-Lift aerodynamics. J. Aircr. 12, 501–530 (1975)
Anderson, L.D.: Aircraft Performance and Design, p. 21. TATA McGrawHill (2010)
Rudolph, Peter K.C.: High lift systems on commercial subsonic airlines. In: NASA Contractor Report 4746. Seatle (1996)
Federal Aviation Administration, Chapter 6: Floght Controls, in Pilot’s Handbook of Aeronautical Knowledge, pp. 6-1–6-12. Washington D.C. (2016)
Lacy, D., Sclafani, A.: Development of the high lift common research model (HL-CRM): a representative high lift configuration for transonic transport. In: AIAA SciTech Forum, 54th AIAA Aerospace Sciences Meeting, San Diego (2016)
Weich, F.E.: Preliminary Investigation of Modifications to Conventional Airplanes to give Nonstalling and short-landing Characteristics. National Advisory Committee for Aeronautics, Washington D.C. (1932)
Tinoco, E.N., Ball, D.N., Rice, F.A.: PAN AIR analysis of a transport high-lift configuration. J. Aircr. 24, 181–187 (1987)
Meredit, P.T.: Viscous phenomena affecting high lift systems. In: Proceedings of the High Lift Systems and Suggestions for Further CFD Development, pp. 19.1–19-8. AGARD (1992)
Rumsey, C.L., Ying, S.X.: Prediction of high lift: review of present CFD capability. Prog. Aerosp. Sci. 38, 145–180 (2002)
Slotnik, J.P., Hammon, J.A., Chaffin, M.: In Overview of the First AIAA CFD High Lift Prediction Workshop (Invited), AIAA paper 2011–862(2011)
Rumsey, C.L., Slotnik, J., Long, M., Stuever, R.A., Wayman, T.R.: Summary of the first AIAA CFD high lift prediction workshop. J. Aircr. 48, 2068–2079 (2011)
Rumsey, C.L., Slotnik, J.P.: In Overview of the Second AIAA High Lift Prediction Workshop (Invited), AIAA paper (2013)
HiLiftPW Committee: Summary next steps and discussion. In: Third High Lift Prediction Workshop, AIAA (2017) (cited 24 July 2017). https://hiliftpw.larc.nasa.gov/
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Matiz-Chicacausa, A., Sedano, C.A. (2018). Review on High-Lift Systems for Aerodynamic Applications. In: López Mejia, O., Escobar Gomez, J. (eds) Numerical Simulation of the Aerodynamics of High-Lift Configurations. Springer, Cham. https://doi.org/10.1007/978-3-319-62136-4_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-62136-4_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-62135-7
Online ISBN: 978-3-319-62136-4
eBook Packages: EngineeringEngineering (R0)