
Abstract
In the present paper we introduce a numerical technique for solving fractional optimal control problems (FOCP) based on an orthonormal wavelet. First we approximate the involved functions by Sine-Cosine wavelet basis; then, an operational matrix is used to transfer the given problem in to a linear system of algebraic equations. In fact operational matrix of the Riemann-Liouville fractional integration and derivative of Sine-Cosine wavelet are employed to achieve a linear algebraic equation, in place of the dynamical system in terms of the unknown coefficients. The solution of this system, gives us the solution of original problem. A numerical example is also given.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Fractional optimal control problem
- Sine-Cosine wavelet
- Operational matrix
- Caputo derivative
- Riemann-Liouville fractional integration
1 Introduction
Many application of the fractional calculus is in basic sciences and engineering. Many realistic model of physical [8] phenomenon which has dependence at both the time instance and on the previous time history, can be utter with fractional calculus. For example it can be applied in nonlinear oscillations of earthquakes, fluid-dynamic traffic [9], frequency dependent damping behavior of various viscoelastic materials [2], solid mechanics [18], economics [3], signal processing [17], and control theory [4].
One of the main difficulties is how to solve the fractional differential equations. The most commonly techniques proposed to solve them are Adomian decomposition method (ADM) [22], Variational Iteration Method (VIM) [20], Operational Matrix Method [19], Homotopy Analysis Method [6, 7], Fractional Difference Method (FDM) [15] and Power Series Method [16].
A fractional optimal control problem is an optimal control problem in which the performance index or the differential equations governing the dynamic of the system or both contains at least one fractional order derivative term [25]. Integer order optimal controls have already been well established and a significant amount of works have been done in the field of optimal control of integer order systems. Agrawal formulated and developed a numerical scheme for the solution of FOCP [1] in the Caputo sense. Biswas proposed a pseudo-state space representation of a fractional dynamical system, which is exploited to solve a fractional optimal control problem using a direct numerical method [21]. Sweilam et al. solved some types of fractional optimal control problem with a Hamiltonian formula using a spectral method based on Chebyshev polynomials [24]. Bernstein polynomials have been used for finding the numerical solution of FOCP by using Lagrange multipliers [10].
Approximation by orthogonal families of basis functions is widely used in science and engineering. The main idea behind applying an orthogonal basis is reduction of the problem under consideration into a system of algebraic equations. This is possible by truncating series of orthogonal basis functions for the solution of the problem and applying operational matrices. The orthogonal functions are classified into three main category [23]: the first one is sets of piecewise constant orthogonal functions such as the Walsh functions and block pulse functions. The second one is orthogonal polynomials such as the Laguerre, Legendre and Chebyshev functions, and the last one is sine-cosine functions. In one hand approximating a continuous function with piecewise constant basis functions results in a piecewise constant approximation, on the other hand, if a discontinuous function is approximated with continuous basis functions, the resulting approximation is continuous which cannot properly model the discontinuities. So, neither continuous basis functions nor piecewise constant basis functions, if used alone, can efficiently model both continuity and discontinuity of phenomena at the same time. In the case that the function under approximation is not analytic, wavelet functions will be more effective.
In this paper, we propose a computational method based on Sine-Cosine wavelet with their fractional integration and derivative operational matrix to solve the FOCP. The main idea is reduction the problem under consideration into a system of algebraic equations. To this end, we expand the fractional derivative of the state variable and the control variable using the Sine-Cosine wavelet with unknown coefficients.
The paper is organized as follows. In first section we will give the definitions of fractional calculus, then express a brief review of block pulse function and the related fractional operational matrices. In Sect. 4, we describe Sine-Cosine wavelets and its application in function approximation. In Sect. 5, operational matrices of fractional integration and derivative for considered wavelet is given. In Sect. 6, the proposed method is described for solving the underlying FOCP. In the last section the proposed method is applied for solving numerical example.
2 Preliminaries of Fractional Calculus
The Riemann-Liouville fractional integration and Caputo differential operator of a function f of order \( \alpha \ge 0\) is defined in [13] as:
3 Review of Block Pulse Functions and the Related Fractional Operational Matrix
In this section first we introduce block pulse function (BPF), then it’s operational matrix of fractional integration.
3.1 Definition of BPF
A set of BPFs \(B_{m'} (t)\) containing \(m'\) component functions in the interval [0, T) is given by
The ith component of the BPF vector \(B_{m'} (t)\) is defined as
A square integrable function f can be expanded into a BPF series as
3.2 Operational Matrix for Fractional Integration of BPF
Suppose that \(F^\alpha \) be the block pulse operational matrix of fractional integration [12]. It is defined as follows,
4 Description of Sine-Cosine Wavelets and Its Application in Function Approximation
4.1 The Sine-Cosine Wavelet
Sine-cosine wavelets \(\psi _{n,m} (t)\) are defined as follows [11],
with
\(n=0,1,\cdots ,2^k-1 ,k=0,1,\cdots \), where l is any positive integer.
4.2 Function Approximation
A function \(f(t)\in L^2 [0,1)\) can be approximated as:
where \(c_{n,m}=\langle f(t),\psi _{n,m}\rangle \) and \(\langle .,.\rangle \) denotes the inner product as:
where \( \varPsi (t)\) represent considered wavelet. C and \(\varPsi (t)\) are \(2^k (2l+1)\times 1\) matrices which are given by:
5 Operational Matrix of Fractional Calculus for Sine-Cosine Wavelet
In this section we find the operational matrix of fractional derivative for the considered wavelet using the operational matrix of fractional integration for BPF.
5.1 Express \(\varPsi (t)\) in Terms of BPF
\(\psi _{n,m} (t)\) as a function can be express in terms of blockpulse function
Now we calculate \(f_i\) for different value of \(i=0,1,\cdots ,m'-1\)
For \(m=0\) we have
For \(m=1, 2, \cdots , l\)
And for \(m=l+1, \cdots , 2l\) we get
Therefore we have \(\varPsi (x)=\varPhi _{m'\times m'} B_{m'} (x)\) where \(\varPhi _{m'\times m'}=\text {diag}(\varPhi _0,\varPhi _1,\cdots ,\) \(\varPhi _{2^k-1}) \), \(\varPhi _n\) is defined as follows, in the following matrix, \(i=n(2l+1)\)
5.2 Operational Matrix of Fractional Integration and Derivative for Sine-Cosine Wavelet
For finding operational matrix of fractional derivative of vector \(\varPsi (t)\), first of all we try to find the operational matrix of fractional integration.
where \(P^\alpha \) is the operational matrix of fractional integration, which calculate as follows
Now we calculate operational matrix of derivative using \(P^\alpha \)
For \(\alpha \in \)(0,1) we have \(n=1\) thus
where D is operational matrix of derivative for \(\varPsi (t)\) which defined as \(D= \text {diag}(w, w,\) \(\cdots , w)\), which is \(2^k (2l+1)\times 2^k (2l+1)\) matrix and w is of size \((2l+1)\times (2l+1)\)
6 Solution of the Fractional Optimal Control Problem by Sine-Cosine Operational Matrix
Consider the fractional optimal control problem with quadratic performance index
where A and B are constant matrices with the appropriate dimensions, also in cost functional S and Q are symmetric positive semi-definite matrices and R is a symmetric positive definite matrix. In this section, the Sine-Cosine wavelet is used for solving the above problem. We approximate each \(x_i (t)\) and \(u_i (t)\), in terms of Sine-Cosine wavelets as
where \(X_i\), \(U_i\) are vectors of order \(2^k (2l+1)\times 1\), X and U are vectors of order \(s2^k (2l+1)\times 1\) and \(q2^k (2l+1)\times 1\) respectively. \(\otimes \) denotes the kronecker product. By substituting the above mentioned relation into objective function
Since considered wavelet is orthonormal, it means \(\int _0^1 \varPsi ^T (t)\varPsi (t)dt=I\), we can rewrite Eq. (38) as follows
Similarly, we do the same method for Eq. (32)
As in a typical tau method [5] we generate \(2^k(2l+1)-1\) linear equations by applying
Also, by substituting Eq. (35) in (33) we get
Equations (43) and (44) generate \(2^k(2l+1)\) set of linear equations. These linear equations can be solved for unknown coefficients of the vectors \(X^T\) and \(U^T\). Consequently, X(t) and U(t) can be calculated.
7 Illustrative Example
We applied the method presented in this paper and solved the undergoing example.
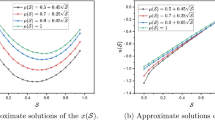
Example 1
Consider the following time invariant FOCP [14],
We want to find a control variable u(t) which minimizes the quadratic performance index J. This problem is solved by proposed method with \(\alpha =1, m=5\) and \(n=7\), the numerical value obtained for J is 0.1979, which is close to the exact solutions in the case \(\alpha = 1 (0.1929)\).
8 Conclusion
In this paper, we derive a numerical method for fractional optimal control based on the operational matrix for the fractional integration and differentiation. The procedure of constructing these matrices is summarized. An example is given to show the efficiency of method. The obtained matrices can also be used to solve problems such as fractional optimal control with delay. Moreover we could find these matrices using another set of orthogonal functions instead of BPFs, it seems if we use a set of continuous orthogonal function the numerical result will improve.
References
Agrawal OP (2008) A formulation and numerical scheme for fractional optimal control problems. J Vibr Control 14(9–10):1291–1299
Bagley RL, Torvik P (1983) A theoretical basis for the application of fractional calculus to viscoelasticity. J Rheol 27(3):201–210
Baillie RT (1996) Long memory processes and fractional integration in econometrics. J Econometrics 73(1):5–59
Bohannan GW (2008) Analog fractional order controller in temperature and motor control applications. J Vibr Control 14(9–10):1487–1498
Canuto C, Hussaini MY, Quarteroni A, Zang TA Jr (1988) Spectral methods in fluid dynamics. Annu Rev Fluid Mech 57(196):339–367
Dehghan M, Manafian J, Saadatmandi A (2010) The solution of the linear fractional partial differential equations using the homotopy analysis method. Z Naturforsch A 65(Z. Naturforsch):935–949
Dehghan M, Manafian J, Saadatmandi A (2010) Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numer Methods Partial Differ Equ 26(2):448–479
He J (1998) Nonlinear oscillation with fractional derivative and its applications. In: International conference on vibrating engineering, Dalian, China, vol 98, pp 288–291
He J (1999) Some applications of nonlinear fractional differential equations and their approximations. Bull Sci Technol 15(2):86–90
Jafari H, Tajadodi H (2014) Fractional order optimal control problems via the operational matrices of bernstein polynomials. Upb Sci Bull 76(3):115–128
Kajani MT, Ghasemi M, Babolian E (2006) Numerical solution of linear integro-differential equation by using sine-cosine wavelets. Appl Math Comput 180(2):569–574
Li Y, Sun N (2011) Numerical solution of fractional differential equations using the generalized block pulse operational matrix. Comput Math Appl 62(3):1046–1054
Liu F, Agrawal OP et al (1999) Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Academic Press
Lotfi A, Dehghan M, Yousefi SA (2011) A numerical technique for solving fractional optimal control problems. Comput Math Appl 62(3):1055–1067
Momani S, Odibat Z (2007) Numerical comparison of methods for solving linear differential equations of fractional order. Chaos Solitons Fractals 31(5):1248–1255
Odibat ZM, Shawagfeh NT (2007) Generalized taylor’s formula. Appl Math Comput 186(1):286–293
Panda R, Dash M (2006) Fractional generalized splines and signal processing. Sig Process 86(9):2340–2350
Rossikhin YA, Shitikova MV (1997) Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl Mech Rev 50:15–67
Saadatmandi A, Dehghan M (2010) A new operational matrix for solving fractional-order differential equations. Comput Math Appl 59(3):1326–1336
Saez D (2009) Analytical solution of a fractional diffusion equation by variational iteration method. Comput Math Appl 57(3):483–487
Sen S (2011) Fractional optimal control problems: A pseudo-state space approach. J Vibr Control 17(17):1034–1041
Shawagfeh NT (2002) Analytical approximate solutions for nonlinear fractional differential equations. Appl Math Comput 131(2–3):517–529
Sohrabi S (2011) Comparison chebyshev wavelets method with bpfs method for solving abel’s integral equation. Ain Shams Eng J 2(3–4):249–254
Sweilam NH, Alajami TM, Hoppe RHW (2013) Numerical solution of some types of fractional optimal control problems. Sci World J 2013(2):306237
Tangpong XW, Agrawal OP (2009) Fractional optimal control of continuum systems. J Vibr Acoust 131(2):557–557
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Kheirabadi, A., Vaziri, A.M., Effati, S. (2018). A New Approach for Solving Optimal Control Problem by Using Orthogonal Function. In: Xu, J., Gen, M., Hajiyev, A., Cooke, F. (eds) Proceedings of the Eleventh International Conference on Management Science and Engineering Management. ICMSEM 2017. Lecture Notes on Multidisciplinary Industrial Engineering. Springer, Cham. https://doi.org/10.1007/978-3-319-59280-0_18
Download citation
DOI: https://doi.org/10.1007/978-3-319-59280-0_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59279-4
Online ISBN: 978-3-319-59280-0
eBook Packages: EngineeringEngineering (R0)