
Abstract
In this paper, a nonsingular terminal sliding mode (NTSM) based tracking control (NTSMTC) scheme for an autonomous surface vehicle (ASV) subject to unmodelled dynamics and unknown disturbances is proposed. The salient features of the NTSMTC scheme are as follows: (1) The NTSMTC scheme is designed by combining the NTSM technique with an established finite-time unknown observer (FUO) which enhances the system robustness significantly and achieves accurate tracking performance; (2) By virtue of the NTSMTC scheme, not only that unknown estimation errors are controlled to zero but also tracking errors can be stabilized to zero in a finite time; (3) The finite-time convergence of the entire closed-loop control system can be ensured by the Lyapunov approach. Simulation studies are further provided to demonstrate the effectiveness and remarkable performance of the proposed NTSMTC scheme for trajectory tracking control of an ASV.
N. Wang—This work is supported by the National Natural Science Foundation of P.R. China (under Grants 51009017 and 51379002), Applied Basic Research Funds from Ministry of Transport of P.R. China (under Grant 2012-329-225-060), China Postdoctoral Science Foundation (under Grant 2012M520629), the Fund for Dalian Distinguished Young Scholars (under Grant 2016RJ10), the Innovation Support Plan for Dalian High-level Talents (under Grant 2015R065), and the Fundamental Research Funds for the Central Universities (under Grant 3132016314).
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Nonsingular terminal sliding mode (NTSM)
- Finite-time stability
- Finite-time unknown observer (FUO)
- Trajectory tracking control
- Autonomous surface vehicle (ASV)
1 Introduction
In last decades, autonomous surface vehicles (ASVs) have drawn more and more attention mainly due to important roles in military and civilian applications. However, suffering from a variety of external disturbance variations including winds, waves and currents, ASVs are highly nonlinear and the exact ASV model can hardly be known, which makes it much challenging and difficult when designing a controller for ASVs.
Traditionally, fuzzy logic systems (FLS) [1] and fuzzy neural networks (FNN) [2] are usually employed for tracking control of an ASV, which can explicitly take into account complicated unknowns including external disturbances and even unmodelled dynamics. As a result, the previous approximation-based methods can achieve many good properties including disturbance rejection capacity and high steady-state accuracy. However, it should be pointed out that only asymptotic or exponential convergence can be obtained in the previous works rather than finite-time convergence.
Recently, finite-time control theorems have been increasingly studied; for example, nonsingular terminal sliding mode (NTSM) technique [3], homogeneity [4] and adding a power integrator (API) [5] approaches. Note that fast convergence rate and high robustness can be achieved pertaining to the foregoing finite-time based methods. Motivated by the above observations, finite-time trajectory tracking and heading controller have been established by Wang in [6] and [7], respectively. However, finite-time control problems of an ASV in the presence of complicated unknowns is still largely open. It is mainly for this reason that finite-time convergence is pursued in this paper in order to achieve fast and precise tracking performance.
In this paper, a nonsingular terminal sliding mode (NTSM) based tracking control (NTSMTC) scheme is proposed. To be more specific, the NTSM technique and the designed finite-time unknown observer (FUO) are integrated to preserve the advantages of each method, i.e., fast convergence and high robustness. Moreover, rigorously proof has been given to ensure the overall closed-loop system to be finite-time stable and it has been proven that tracking errors can be stabilized to zero in a finite time, which as a result leads to accurate tracking performance.
2 Problem Formulation
The kinematics and dynamics of an ASV moving in a planar space can be expressed as follows:
where
Here, \(\pmb {\upeta } = [x,y,\psi ]^{\mathrm {T}}\) is the 3-DOF position (x, y) and heading angle \((\psi )\) of the ASV, \(\pmb {\upnu } = [u,v,r]^{\mathrm {T}}\) is the corresponding linear velocities (u, v), i.e., surge and sway velocities, and angular rate (r), i.e., yaw, in the body-fixed frame, \(\pmb {\uptau }=[\tau _1,\tau _2,\tau _3]^{\mathrm {T}}\) and \(\pmb {\uptau }_{\updelta }:={\mathbf {M}}{\mathbf {R}}^{\mathrm {T}}(\psi )\pmb {\updelta }(t)\) with \(\pmb {\updelta }(t)=[\delta _1(t),\delta _2(t),\delta _3(t)]^{\mathrm {T}}\) denote control input and mixed external disturbance, and \({\mathbf {J}}(\psi )\) is a rotation matrix governed by
with the following properties:
where \({\mathbf {S}}(r)= \left[ \begin{array}{ccc} 0 &{} -r &{} 0 \\ r &{} 0 &{} 0 \\ 0 &{} 0 &{} 0 \end{array} \right] \), the inertia matrix \({\mathbf {M}}= {\mathbf {M}}^{\mathrm {T}} > 0\), the skew-symmetric matrix \({\mathbf {C}}(\pmb {\upnu })=-{\mathbf {C}}(\pmb {\upnu })^{\mathrm {T}}\), and the damping matrix \({\mathbf {D}}(\pmb {\upnu })\) can be written as follows:
where \(m_{11}=m-X_{{\dot{u}}},\;m_{22}=m-Y_{{\dot{v}}},\;m_{23}=mx_g-Y_{{\dot{r}}},\;m_{32}=mx_g-N_{{\dot{v}}}\), \(m_{33}=I_z-N_{{\dot{r}}};\; c_{13}(\pmb {\upnu })=-m_{11}v-m_{23}r,\;c_{23}(\pmb {\upnu })=m_{11}u;\; d_{11}(\pmb {\upnu })=-X_u-X_{|u|u}|u|-X_{uuu}u^2\), \(d_{22}(\pmb {\upnu })=-Y_{v}-Y_{|v|v}|v|,\; d_{23}(\pmb {\upnu })=-Y_r-Y_{|v|r}|v|-Y_{|r|r}|r|,\; d_{32}(\pmb {\upnu })=-N_{v}-N_{|v|v}|v|-N_{|r|v}|r|\;\) and \(d_{33}(\pmb {\upnu })=-N_r-N_{|v|r}|v|-N_{|r|r}|r|\). Here, m is the mass of the ASV, \(I_z\) is the moment of inertia about the yaw rotation, \(Y_{{\dot{r}}}=N_{{\dot{v}}}\), and symbols \(X_{*},Y_{*},N_{*}\) represent corresponding hydrodynamic derivatives.
Consider the desired trajectory generated by
where
Here, \(\pmb {\upeta }_d = [x_d,y_d,\psi _d]^{\mathrm {T}}\) and \(\pmb {\upnu }_d = [u_d,v_d,r_d]^{\mathrm {T}}\) represent the desired position and velocity vectors.
The objective in this context is to design a control law such that the actual trajectory in (1)–(2) can track exactly the desired targets generated by (6)–(7) in a finite time \(0<T<\infty \), i.e., \(\pmb {\upeta }(t)\equiv \pmb {\upeta }_d(t)\) and \(\pmb {\upnu }(t)\equiv \pmb {\upnu }_d(t),\forall \; t>T\).
3 Controller Design and Stability Analysis
3.1 Controller Design
Consider the following transformations on \(\pmb {\upnu }\) and \(\pmb {\upnu }_d\):
where \(\pmb {\upomega }=[\upomega _1,\upomega _2,\upomega _3]^{\mathrm {T}}\), \(\pmb {\upomega }_d=[\upomega _{d1},\upomega _{d2},\upomega _{d3}]^{\mathrm {T}}\), \({\mathbf {J}}={\mathbf {J}}(\psi )\) and \({\mathbf {J}}_d={\mathbf {J}}(\psi _d)\).
Combining (1)–(2) with (8a) yields
where
where
Using (9)–(10) and (11)–(12), we have
where
Here, \({\mathbf {S}}={\mathbf {S}}(\upomega _3)\), \({\mathbf {S}}_d={\mathbf {S}}(\upomega _{d3})\), \(\pmb {\upeta }_e=\pmb {\upeta }-\pmb {\upeta }_d:=[\upeta _{e1},\upeta _{e2},\upeta _{e3}]^{\mathrm {T}}\) and \(\pmb {\upomega }_e=\pmb {\upomega }-\pmb {\upomega }_d:=[\upomega _{e1},\upomega _{e2},\upomega _{e3}]^{\mathrm {T}}\).
Assumption 1
The unknown term \(\pmb {f}_u\) in (13)–(14) satisfies
for a bounded constant \(L_{fu}<\infty \).
In the light of (13)–(14), we define the nonsingular terminal sliding mode (NTSM) manifold as follows:
where \(\pmb {\upsigma }(t)=\left[ \upsigma _1(t),\upsigma _2(t),\upsigma _3(t)\right] ^{\mathrm {T}}\).
Differentiating \(\pmb {{\upsigma }}(t)\) with respect to time, we obtain
where \(\mathrm {diag}(\pmb {\upomega }_e^{({p}/{q})-1}):=\mathrm {diag}(\upomega _{e1}^{(p/q)-1},\upomega _{e2}^{(p/q)-1},\upomega _{e3}^{(p/q)-1})\) and \(\dot{\pmb {\upomega }}_e:=[{\dot{\upomega }}_{e1},{\dot{\upomega }}_{e2},{\dot{\upomega }}_{e3}]^{\mathrm {T}}\).

Control system diagram.
Concerning the ASV tracking error dynamics (13)–(14) and sliding functions (16)–(17), the NTSM based tracking control (NTSMTC) scheme can be designed accordingly
Here, \(\upbeta>0, p>0\) and \(q>0\) are positive old integers satisfying \(1<p/q<2\), \(\pmb {\upkappa }=\mathrm {diag}(\upkappa _1,\upkappa _2,\upkappa _3)\) with positive constants \(\upkappa _j(j=1,2,3)\), and \(\mathrm {sgn}\left( \pmb {\upsigma }\right) =\left[ \mathrm {sgn}(\upsigma _1),\mathrm {sgn}(\upsigma _2),\mathrm {sgn}(\upsigma _3)\right] ^{\mathrm {T}}\), with \(\pmb {\theta }_1\) derived by the following finite-time unknown observer (FUO):
where \(\pmb {\theta }_i:=[\theta _{i1},\theta _{i2},\theta _{i3}]^{\mathrm {T}},i=0,1,2\), \(\pmb {\upzeta }_k:=[\upzeta _{k1},\upzeta _{k2},\upzeta _{k3}]^{\mathrm {T}},k=0,1\), \(\uplambda _j>0,j=1,2,3\) and \({\pmb {\mathcal {L}}}=\mathrm {diag}(\ell _1,\ell _2,\ell _3)\). The corresponding control system diagram are also illustrated in Fig. 1.
3.2 Stability Analysis
The key result ensuring finite-time stability of the closed-loop is now stated.
Theorem 1
(NTSMTC). Consider the closed-loop system composed of (13)–(14), (16)–(17) and (18)–(19), the actual trajectory and velocity of the ASV system (1)–(2) will converge to the desired signals generated by (6)–(7) in a finite time \(0<T<\infty \), i.e., \(\pmb {\upeta }(t)\equiv \pmb {\upeta }_d(t)\) and \(\pmb {\upnu }(t)\equiv \pmb {\upnu }_d(t),\forall \; t>T\).
Proof
Consider the Lyapunov function as follows:
Differentiating V along (13)–(14) yields
Substituting (18) into (21) yields
Define unknown observation errors as follows:
Then the error dynamics can be derived as
i.e.,
According to [8], \(\pmb {\mathrm {z}}_1, \pmb {\mathrm {z}}_2\) and \(\pmb {\mathrm {z}}_3\) can be stabilized to zero in a finite time, and this yields
Combining (22) and (26) we have
Define
Clearly, when \(\upomega _{ej}\ne 0\), since p and q are positive old integers and \(1<p/q<2\), we have \(\uprho >0\). Thus,
Then finite-time stability can be ensured according to [9, Theorem 1].
When \(\upomega _{ej}=0\), substituting control law (18) into (13)–(14), we have
Hence,
And this yields
with \(j=1,2,3\).
Therefore, \(\dot{\upomega }_{ej}<0\) when \(\upsigma _j>0\), and \(\dot{\upomega }_{ej}>0\) when \(\upsigma _j<0\). Clearly, \(\dot{\upomega }_{ej}=0\) is not an attractor. It can be concluded that manifold (16) can be reached in a finite time \(t_1^*>0\).
Next, we will prove that once the manifold is reached, tracking errors \(\pmb {\upeta }_{e}\) and \(\pmb {{\upomega }}_{e}\) will converge to zero along the manifold in a finite time.
When \(\pmb {\upsigma }={0}\), from (16), we have
i.e.,
It follows that tracking errors \(\upeta _{ej}\) and \(\upomega _{ej}\) can be stabilized to zero along \(\upsigma _j=0\) at time \(t_2^*={p\upbeta ^{(-{q}/{p})}}\cdot \upeta _{ej}^{[1-({q}/{p})]}(t_1^*)/({p-q})+t_1^*\).
Now we can get the conclusion that the closed-loop system (13)–(14), (16)–(17) and (18)–(19) is finite-time stable. This completes the proof.
Remark 1
If \(p=q=1\), the NTSMTC scheme (18) will degrade to a sliding mode control SMC scheme (\(\pmb {\uptau }_{\mathrm {SMC}}\)) accordingly
with \(\pmb {\theta }_1\) derived by (19).
Remark 2
The chattering can be reduced by replacing the \(\mathrm {sgn}(\upsigma _j)\) function with a saturation function described by
with \(\upvarepsilon >0\) and \(0<\upvartheta <1\).
4 Simulation Studies
This section assesses the control performance of the proposed NTSMTC law in terms of trajectory tracking of an ASV. Simulations studies are conducted on a well-known ASV named CyberShip II [10].
Assume external disturbances in (1) are governed by
Consider the desired trajectory generated by (6)–(7), assume \(\pmb {\uptau }_d=[4, 3\cos ^2 (0.1\pi t),\sin ^2(0.1\pi t)]^{\mathrm {T}}\), the initial conditions are \(\pmb {\upeta }(0)=\left[ 15.5, 8,\pi /4\right] ^{\mathrm {T}}\), \(\pmb {\upnu }(0)=[0,0,0]^{\mathrm {T}}\), \(\pmb {\upeta }_d(0)=[16,7.8,\pi /3]^{\mathrm {T}}\) and \(\pmb {\upnu }_d(0)=[1,0,0]^{\mathrm {T}}\).
Correspondingly, parameters of the FUO are: \(\uplambda _1=2.2\), \(\uplambda _2=1.1\), \(\uplambda _3=0.8\), \(\pmb {\mathcal {L}}=\mathrm {diag}(30,30,30)\); and parameters of the NTSMTC scheme are: \(\upbeta =1\), \(p=5\), \(q=3\), \(\pmb {\upkappa }=\mathrm {diag}(3.6,3.6,3.6)\), \(\upvarepsilon =6.8\), \(\upvartheta =0.58\).

Desired and actual trajectories.

Curves of position tracking.

Curves of velocity tracking.

Curves of unknown estimation.

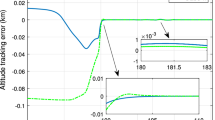
Curves of zero tracking errors.

Curves of smooth control inputs.
In comparison with the traditional SMC approach \(\pmb {\uptau }_{\mathrm {SMC}}\) in (35), it can be clearly seen from Fig. 2 that the actual trajectory (solid line) can track the desired (dashed line) one with faster convergence rate. Correspondingly, the actual position \(\pmb {\upeta }=[x,y,\psi ]^{\mathrm {T}}\) and the desired signal \(\pmb {\upeta }_d=[x_d,y_d,\psi _d]^{\mathrm { T}}\) are shown in Fig. 3, which exhibits the higher tracking accuracy. In addition to precise position tracking, actual velocity vector \(\pmb {\upnu }=[u,v,r]^{\mathrm {T}}\) can track the desired target \(\pmb {\upnu }_d=[u_d,v_d,r_d]^{\mathrm {T}}\) very quickly, as shown in Fig. 4. The time-varying unknowns \(\pmb {f}_{u}=[f_{u1},f_{u2},f_{u3}]^{\mathrm {T}}\) and the finite-time identification results \( {\pmb {\theta }}_1=[\theta _{11},\theta _{12},\theta _{13}]^{\mathrm {T}}\) are shown in Fig. 5, which shows the remarkable unknown estimation ability associated with the proposed FUO. It should be noted that trajectory tracking errors can be rendered to zero in a finite time, as shown in Fig. 6. Moreover, control inputs of the NTSMTC scheme are plotted in Fig. 7, which shows the smooth control actions dynamically.
5 Conclusion
In this paper, to pursue finite-time control of an autonomous surface vehicle (ASV) in the presence of unmodelled dynamics and external disturbances, a nonsingular terminal sliding mode (NTSM) based tracking control (NTSMTC) scheme has been proposed. Under the NTSMTC scheme, not only that unmodelled dynamics and unknown disturbances can be completely identified but also finite-time convergence property can be achieved, and thereby contributing to fast convergence rate and high robustness. In addition, comprehensive simulation studies have also been presented to confirm not only the closed-loop control performance but also the effectiveness of the NTSMTC scheme in terms of exact unknown observation.
References
Wang, N., Er, M.J.: Direct adaptive fuzzy tracking control of marine vehicles with fully unknown parametric dynamics and uncertainties. IEEE Trans. Control Syst. Technol. 24(5), 1845–1852 (2016)
Wang, N., Er, M.J.: Self-constructing adaptive robust fuzzy neural tracking control of surface vehicles with uncertainties and unknown disturbances. IEEE Trans. Control Syst. Technol. 23(3), 991–1002 (2015)
Feng, Y., Yu, X.H., Man, Z.H.: Non-singular terminal sliding mode control of rigid manipulators. Automatica 38(12), 2159–2167 (2002)
Hong, Y.G., Xu, Y.S., Huang, J.: Finite-time control for robot manipulators. Syst. Control Lett. 46(4), 243–253 (2002)
Qian, C.J., Lin, W.: A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control 46(7), 1061–1079 (2002)
Wang, N., Qian, C.J., Sun, J.C., Liu, Y.C.: Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles. IEEE Trans. Control Syst. Technol. 24(4), 1454–1462 (2016)
Wang, N., Lv, S.L., Liu, Z.Z.: Global finite-time heading control of surface vehicles. Neurocomputing 175, 662–666 (2016)
Shtessel, Y.B., Shkolnikov, I.A., Levant, A.: Smooth second-order sliding modes: missile guidance application. Automatica 43(8), 1470–1476 (2007)
Bhat, S.P., Bernstein, D.S.: Finite-time stability of homogeneous systems. In: Proceedings of the 1997 American Control Conference, pp. 2513–2514 (1997)
Skjetne, R., Fossen, T.I., Kokotovi’c, P.V.: Adaptive maneuvering with experiments for a model ship in a marine control laboratory. Automatica 41(2), 289–298 (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Lv, S., Wang, N., Wang, Y., Yin, J., Er, M.J. (2017). Nonsingular Terminal Sliding Mode Based Trajectory Tracking Control of an Autonomous Surface Vehicle with Finite-Time Convergence. In: Cong, F., Leung, A., Wei, Q. (eds) Advances in Neural Networks - ISNN 2017. ISNN 2017. Lecture Notes in Computer Science(), vol 10262. Springer, Cham. https://doi.org/10.1007/978-3-319-59081-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-59081-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59080-6
Online ISBN: 978-3-319-59081-3
eBook Packages: Computer ScienceComputer Science (R0)