
Abstract
Tactical information can be determinant to use position data and measures in the aim of match analysis. By using information about collective behavior and tactics it is possible to re-organize tasks or even make decisions during matches. These measures are not limited to the space (as centroid or team’s dispersion) but can also provide information on how teammates interact in the specificity of game and in line with tactical principles. Definitions, graphical visualization, interpretation and case-studies will be presented on this chapter for the following measures: Inter-player Context, Teams’ Separateness, Directional Correlation Delay, Intra-team Coordination Tendencies, Sectorial Lines, Inter-axes of the team, Dominant Region, Major Ranges and Identification of Team’s Formations. The case studies presented involve two five-player teams in an SSG considering only the space of half pitch (68 m goal-to-goal and 52 m side-to-side) and another eleven-player team in a match considering the space of the entire field (106.744 m goal-to-goal and 66.611 m side-to-side) even though only playing in half pitch.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
6.1 Inter-player Context
6.1.1 Basic Concepts
By taking into account the position of a player in regards to the goals and the adversary team positions, one can establish context between players in accordance to game situations.
Definition 6.1
[26] Given a time-series of length N of the positions of a player across the pitch, and the time-series representing the positions of the players of the opposing team, the following contexts are defined for each positional situation:

The player position is represented as \(p_{pos}\), and the position of an opposing team player is represented by \(p_{t2_{pos}}\).
6.1.2 General Interpretation
The Inter-player Context represents the positional changes of players with respect to all other players, thus being the relative position with respect to teammates and opponents [25]. The Inter-player Context proposed has nine possible contexts [25]: (i) “Rear teammate between advanced opponent and own goal”; (ii) “Intermediate teammate between advanced opponent and own goal”; (iii) “Advanced teammate between advanced opponent and own goal”; (iv) “Rear teammate between advanced and rear opponent”; (v) “Intermediate teammate between advanced and rear opponent”; (vi) “Advanced teammate between advanced and rear opponent”; (vii) “Rear teammate between rear opponent and the opposing goal”; (viii) “Intermediate teammate between rear opponent and the opposing goal”; (ix) “Advanced teammate between rare opponent and the opposing goal”.
This measure can be used to classify the positioning of a given player considering the teammates and the opponents and to determine the percentage of time and frequency of time spent at different playing contexts. This measure can help coaches understand the influence of small-sided and constrained games or similar tasks in the development of specific tactical behavior of players. Moreover, the information about the player’s contexts can provide opportunities to optimize the behavior in next occasions.
6.2 Teams’ Separateness
6.2.1 Basic Concepts
Teams’ Separateness is calculated as the sum of the distances between each of the team’s players and their closest opponents.
Definition 6.2
[27] Given a time-series of length N with position data on each player of each team, and where each team is composed of \(N_{team}\) players, the Teams’ Separateness, TS, can be calculated as follows:
such that \(d(i) = \sqrt{(x_j(i) -x_k(i))^2 + (y_j(i) - y_k(i))^2 }\), \(j, k = 1, 2, 3, ..., N_{team}\), and where \((x_j(i), y_j(i))\) represents the positions of player j in instant i, where j is always a player of the first team, and \((x_k(i), y_k(i))\) represents the positions of player k in instant i, where k is always a player of the second team.
6.2.2 Real Life Examples
The results obtained by both teams in the SSG are presented in Table 6.1 with intervals of 30 s and for the entire 3 min in Table 6.2.
A screenshot of a representation of the Team’s Separateness captured from the uPATO software is displayed in Fig. 6.1.

Screenshot of the uPATO game animation with the representation and values of the teams’ separateness visible for both teams in the example SSG
No results are presented for the match because this metric required the existence of data from both teams, which is not available in the evaluated match.
6.2.3 General Interpretation
The Teams’ Separateness quantifies the degree of free movement each team has available and estimates the amount of space separating the players of both teams [27]. This can be measured by using the average distance between all players and their closest opponent, being interpreted as the average radius of action free of opponents [27].
In the original study conducted in different SSG it were found no significant changes in the Teams’ Separateness between different formats of the game (3 vs. 3, 4 vs. 4 and 5 vs. 5) [27]. Such results did not confirm the idea that the reduction of relative space of player decreases the distance values to immediate opponent players.
Teams’ Separateness can be used by coaches to make decisions about which formats of play and pitch size must be designed to ensure greater or smaller free spaces without opponents. In specific circumstances such as in the last third of the pitch or in the scoring box it is required to develop the capacity to play in small spaces as best as possible. For these cases, the Teams’ Separateness will be smaller and the coach may organize tasks that replicate such context. In the other hand, in the first third of the pitch there are more space to organize the circulation of the ball and for that reason the free space is greater and coaches may use such values to adjust training tasks according to the values of the Teams’ Separateness.
6.3 Directional Correlation Delay
6.3.1 Basic Concepts
The Directional Correlation Delay is the delay that exists between the movements of a pair of players. It is calculated by selecting the delay where the correlation of players from the pair is maximum, within a selected time interval.
Definition 6.3
[21] The Directional Correlation function (\(C_{ij}(\tau )\)) in a given period of time, with a delay \(\tau \), between two players of a team, is calculated as follows:
where \(\overrightarrow{v_i}(t)\) is the normalized velocity vector of player i in instant t, and \(\overrightarrow{v_j}(t+\tau )\) is the normalized velocity vector of player j in instant \(t+\tau \). \(\langle \dots \rangle \) represents an average over time, for each instant t in that period of time.
Definition 6.4
The Directional Correlation delay (\(\tau ^*_{ij}\)) in a given period of time is determined by:
where \(C_{ij} (\tau )\) is the Directional Correlation function and w is the number of seconds of the player j that should be analyzed before and after the current instant.
Remark 6.1
In terms of implementation, the time interval was converted from continuous to discrete:
using \(w = 1\) and \(\epsilon = 0.1\).
6.3.2 Real Life Examples
The results obtained by Team A in the SSG are presented for the entire 3 min in Table 6.3. Empty cells represent invalid possibilities (diagonal of the table) or repeated cases already presented in other cells (cell ij is equal to cell ji).
The results obtained by Team B in the SSG are presented for the entire 3 min in Table 6.4.
These values can be compared to those obtained by another team in the match, presented for the entire 3 min in Table 6.5.
A screenshot of a representation of the Directional Correlation Delay captured from the uPATO software is displayed in Fig. 6.2.

Screenshot of the uPATO game animation with the representation and values of the directional correlation delay visible for both teams in the example SSG
6.3.3 General Interpretation
Directional Correlation Delay measures the delay between a movement and this “copied” movement from another player. This measure comes from the study of leaders in bird flocks [21]. The pairwise comparison allows to measure the directional leader-follower network during the match. The delay can either be positive or negative, with a positive delay meaning the first player is the leader, the one who performs the “original” movement, and a negative delay that it is the second player who is the leader.
In the same team it is possible to verify which players are more engaged with the teammates or with opponents and which ones act more independently of the remaining players. This can be interesting to classify the individual profile of players. Some of players may have the profile of leaders and others of followers.
This analysis can be determinant in youth teams to identify which teammates can promote the organization of the team. Moreover, in the case of the sectors (defensive, middle or forward) it is possible to identify the players that guide the colleagues in defensive and attacking movements.
6.4 Intra-team Coordination Tendencies
6.4.1 Basic Concepts
The Intra-team Coordination Tendencies of a team can be calculated by the percentage of time spent in-phase between each pair of players, which can be calculated through the relative phase between a pair of players on the same instant, which are then clustered through the k-means method into three clusters: high synchronization, intermediate synchronization and low synchronization.
Definition 6.5
[4] Given a time-series of length N, where each player has N position tuples of their position on each measured time instant, denoted as \(x_i, i=0,1, \dots , N-1\), the Discrete Hilbert Transform (DHT) of this time-series, \(H_i\), is a sequence \(H_i, i = 0, 1, \dots , N- 1\) defined by the following equation:
where \(coth (\alpha )\) is the hyperbolic cotangent.
Definition 6.6
[23] The relative phase between two signals, \(\Phi (t)\), is given by the following formula:
where \(s_i(t)\) is the signal i and \(H_i(t)\) its DHT.
Definition 6.7
[9] If the phase is between \(-30{}^{\circ }\) and \(30{}^{\circ }\), the signals are considered to be in-phase. The total time period in-phase, \(\Delta \Phi \), between a player pair is given by the following equation:
Definition 6.8
The Intra-team Coordination Tendencies of a team is determined by:
where \(\Delta t\) is the interval of time being analyzed.
Definition 6.9
[19] Given a set of player pairs and their in-phase time-periods, the k-means clustering algorithm classifies the Intra-Team Coordination Tendencies between pairs. The following formula specifies the objective of k-means clustering:
where \(S_i\) are the sets formed by the clustering algorithm, and x the observations, in this case, the \(\Delta \Phi \) of the player pairs.
Remark 6.2
In this case, considering we have three clusters: high, intermediate and low synchronization between players, \(k = 3\).
6.4.2 Real Life Examples
The results obtained from Team A in the SSG are presented for the entire 3 min in Table 6.6.
The results obtained from Team B in the SSG are presented for the entire 3 min in Table 6.7.
These values can be compared to those obtained by another team in the match, presented for the entire 3 min in Table 6.8.
A screenshot of a representation of the Intra-team Coordination Tendencies in the x axis captured from the uPATO software is displayed in Fig. 6.3.

Screenshot of the uPATO game animation with the representation and values of the intra-team coordination tendencies in the x axis visible for both teams in the example SSG
6.4.3 General Interpretation
The Intra-team Coordination Tendencies quantify the sharing of a common goal between pairs of players [9]. In this case, the percentage of time spent between −30\(^{\circ }\) and 30\(^{\circ }\) of relative phase was used to classify the sharing goals [9]. Intra-team Coordination Tendencies are measured at lateral and longitudinal directions.
The study of Intra-Team Coordination performed in 20 professional players revealed that central and lateral defenders were highly synchronized in lateral direction but little in longitudinal direction [9]. Specific clusters may emerge from context and the sectors of the team may contribute to high dependency between teammates. The coordination between sectors cannot be as high as intra-sector.
This measure can quantify the capacity of players to be coordinate in specific moments of the match and to classify the dependency between teammates. The intra-sector coordination in lateral or longitudinal displacement is highly important to build a solid team. The Intra-team Coordination Tendencies can be used to measure a capacity to move synchronously. Moreover, coaches can make decisions about which formation and group of players may contribute to a higher level of synchronization.
6.5 Sectorial Lines
6.5.1 Basic Concepts
The Sectorial Lines are lines that represent the regions of action of each role: defenders, midfielders and attackers. The line is the first degree polynomial that minimizes the Root Mean Squared Error (RMSE) between the polynomial and the players’ positions [5]. A line is defined by the expression \(y = \alpha + \beta x\), which can be calculated using a simple linear regression applied to the coordinates of the players performing that role, given in Definition 6.10.
Definition 6.10
[16] Given a set of points P with N elements (each player performing the same role as the line being calculated), where element i has coordinates \((x_i, y_i)\), the simple linear regression used to estimate the equation \(y = \alpha + \beta x\) calculates \(\alpha \) and \(\beta \) using the following equations:
where \(\overline{x}\) is the average of the values of x, and similarly \(\overline{y}\) is the average of the values of y.
6.5.2 Real Life Examples
The distance between two Sectorial Lines was calculated by the differences of value of x in the y position corresponding to the center of the field, as illustrated in Fig. 6.4.

Representation of how the distance is calculated between Sectorial Lines using the points of the line in \(y = \frac{l}{2}\), where l is the length of the field
The results obtained by Team A in the match are presented in Table 6.9 with intervals of 30 s represented in Table 6.10.
No results are presented for the teams in the SSG because this metric required the existence of a fixed role for each player, which is a flexible feature in SSGs.
6.5.3 General Interpretation
The Sectorial Lines define the three main lines of a team [5]: (i) defensive; (ii) middle; and (iii) forward. This measure allows to identify how close are the sectors of the team and how coordinate they are. The original study verified that small values of coordination were found between Sectorial Lines of the team [5].
This measure represents one of the main observations made by coaches in top view analysis: the distance between ‘lines’. The lines are the lateral displacements of the players from a sector (defensive, middle or forward). During defensive moments, the lines must be close to avoid significant spaces between them. Great spaces between lines may allow the opponent team to penetrate with the ball and exploit the free space to move forward.
Small values of distance between Sectorial Lines are expected in defensive moments. On the other hand, the attacking moments will lead to a greater dispersion mainly between forward and middle line. Coaches can use the information of the distance between lines to characterize the defensive efficacy of the team during matches and to develop tasks that promote similar spaces in training sessions.
6.6 Principal Axes of the Team
6.6.1 Basic Concepts
From the position data of a team’s players, the point cloud formed by the players’ positions in a time instant has two principal axes that can be calculated from the eigenvectors of the point cloud. These axes can be calculated for the entire team, or for each sector separately, using only position data of the players of a single sector.
Preposition 6.1
[1, 6] Given a symmetric real matrix, \(A \in \mathbb {R}^{n \times n}\):
-
1.
all eigenvalues of A are real;
-
2.
all eigenvectors of A are real;
-
3.
if all eigenvalues of A are distinct, then their eigenvectors are orthogonal.
Definition 6.11
[1] Let A be a matrix of order n. The vector \(u \in \mathbb {R}^n \backslash \{0\}\) is an eigenvector of A if there exists a scalar \(\lambda \) such that:
Then, \(\lambda \) is an eigenvalue of A associated to the eigenvector u.
Definition 6.12
[2, 8, 13, 15, 28] Given a time-series of length N containing the positions of each player on every measured instant, the variance-covariance matrix of the data, \(M \in \mathbb {R}^{2 \times 2}\), can be described as follows:
where \(var(x) = \frac{1}{N-1} \sum _{i=1}^N (x_i - \overline{x})^2 \) and \(cov(x,y) = \frac{1}{N-1} \sum _{i=1}^N (x_i - \overline{x})(y_i - \overline{y})\).
If the nonzero eigenvalues of M are distinct, then the orthogonal eigenvectors of M define the direction of the Principal Axes of the team, and the length of the Principal Axes is given by the following equation:
Remark 6.3
In this case, the eigenvalues of \(M \in \mathbb {R}^{2 \times 2}\) are found through the following equation:
where the \(\lambda \in R \) are the eigenvalues of M and \(I_2 \in \mathbb {R}^{2 \times 2}\) is the identity matrix of order 2.
From each different nonzero eigenvalue, \(\lambda _i \in R, i=1,2\), of M, the corresponding eigenvector, \(u_i \in \mathbb {R}^2, i=1,2\) is given as the solution of the following equation:
Remark 6.4
The distance between the center of the Principal axes of two teams can be calculated as the Inter-team Distance, presented in Sect. 4.2.
6.6.2 Real Life Examples
A screenshot of a representation of the Inter-axes captured from the uPATO software is displayed in Fig. 6.5.

Screenshot of the uPATO game animation with the representation and values of the inter-axes visible for both teams in the example SSG
6.6.3 General Interpretation
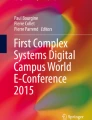
A set of dots can have a center of gravity and its two Principal Axes [13]. In the original articles that proposed this measure, the aim was to classify the positioning of defense considering the opponent’s team [13, 18]. The oscillation of both axes may represent the notion of ’block’ or ’in pursuit’ for the defense [12, 18]. The orientation of the axes indicates the direction of greater variance of position of the players of the team. This is better exemplified in Fig. 6.6, where the two axes point towards the direction of greater variance of the data. the length of the axes is double the length of the component vector calculated through 6.14, with L being the length of each extremity to the intersection point.

Example scheme of the Principal Axes of a point cloud. The largest axis points towards the direction of the greater dispersion of data, while the second axis is orthogonal to the first, and points towards the second largest dispersion
In the case of no classification of attack or defense, this measure can be readjusted to classify the interactions between Sectorial Lines.
Moreover, Principal Axes can be also analyzed by sectors. It can be possible to identify the variation of distances between the intersection of the defensive and attacking axes of both teams or between middle axes. This may provide useful information to identify the behavior of the lines in specific situations. Some teams will opt to approximate the forward line to the opponent’s defensive line, while others will try to be far to gain some space. The relationship between middle axes will also be important to understand the dynamic in attacking and defensive moments.
6.7 Dominant Region
6.7.1 Basic Concepts
The playing field is divided in \(length \times width\) squares, where each square has \(1 \mathrm {m^{2}}\) of area. Each square is attributed to the player with the least euclidean distance to it. The set of squares belonging to a player define their Dominant Region.
Definition 6.13
[24] Given a time-series of length N containing the positions of each player on every measured instant, and dividing the field of play in \(length \times width\) squares, the Dominant Region of a player p on instant t is given by the following equation:
in which \( d(s_{i, j},k) = \sqrt{(x_{s_{i,j}} - pos_{k_x}(t))^2 + (y_{s_{i,j}} - pos_{k_y}(t))^2}\), and where s is the set of all squares that make up the field of play, \(s_{i,j}\) the square on position (i, j) of the field, and \((pos_{k_x}, pos_{k_y})\) the position of player k.
Definition 6.14
[24] Given a set of N squares, defining the Dominant Region of a player, the area of the Dominant Region is given by:
Definition 6.15
[24] Given a set of Dominant Region areas, \(DM_{a}\), containing the different Dominant Region areas of each player of a team, the area of the Dominant Region of a team is given by:

Representation of the values obtained in the dominant region visible in the example SSG
6.7.2 Real Life Examples
The results obtained by both teams in the SSG are represented for the entire 3 min in Fig. 6.7.

Screenshot of the uPATO game animation with the representation and values of the dominant region visible in the example SSG
A screenshot of a representation of the Dominant Region captured from the uPATO software is displayed in Fig. 6.8.
No results are presented for the match because this metric required the existence of data from both teams, which is not available in the evaluated match.
6.7.3 General Interpretation
The Voronoi region can be used to classify the spatial territory of a player [29]. This measure allows to quantify the spatial partitioning of the pitch area into cells, each associated with players according to their positions [11]. The cells result from applying the concept of nearest-neighbor rule in which each player is associated to all parts of the pitch that are nearer to that player than to any other player [11, 22]. Voronoi diagrams may help describe the interaction between the two teams by comparing the spatial pattern formed by the players and the oscillations of spatial occupation of players in specific moments of the game [10].
Moreover, the observation of individual spatial regions can characterize the capacity and dominance of players during the match and quantify the zones of influence of each player. The collective measure may also determine the territorial influence of the team during the game and to monitor which zones are more controlled by a team. This measure can help to classify the patterns of spatial occupation of teams and more specifically of players.
6.8 Major Ranges
6.8.1 Basic Concepts
The Major Range of each player is defined as an ellipse centered on its average position, with its axes defined as the standard deviation of the player’s movement.
Definition 6.16
[31] Given a time-series of length N containing the positions of each player on every measured instant, the Major Ranges of the team are the ellipses defined, for each player of the team, by the following equation:
where \(({\overline{x}}, {\overline{y}})\) is the average position of a player during the time-series and \(\sigma \) represents the standard deviation of the player’s position during the time series.
6.8.2 Real Life Examples
The results obtained by a player in each team in the SSG are presented for periods of 30 s in Table 6.11 and for the entire 3 min in Table 6.12.
These can be compared to those obtained by two players in the match, presented in Table 6.13 with intervals of 30 s and for the entire 3 min in Table 6.14.
A screenshot of a representation of the Major Ranges captured from the uPATO software is displayed in Fig. 6.9.

Screenshot of the uPATO collective metrics representation of the Major Ranges in the example SSG
6.8.3 General Interpretation
The Major Ranges approach was introduced in a soccer case study [31]. This measure contributes to assess the division of labor between players in a team [7]. As described by Duarte et al. [7] “the predominant area of each individual’s interventions during performance is defined by an ellipse centered at the 2-dimensional mean location of each performer, with semi-axes being the standard deviations in X and Y directions, respectively”.
This measure represents the range of a player during different periods of the match and may provide important information about variations of spatial occupation in different scenarios. It can be also assessed the coordination between teammates during the performance and identify if the patterns of spread or contract may be associated between playing roles. Task constraints (e.g., opponents, goal, match status, possession of the ball) may influence the variations of Major Ranges in the players. The variation of the ellipses in longitudinal or lateral axes may also indicate some patterns to explore different playing styles in defensive and attacking phases. In attacking moments, an ellipse with prominence in longitudinal axis may indicate a tendency to exploit the direct playing style. In the other hand, a higher range in lateral axis may indicate that the team varies the zone of play by using circulation of the ball. The variation of the ellipse in different periods of the match can be also useful to identify how team’s behave over the match in their playing style.
6.9 Identify Team’s Formations
6.9.1 Basic Concepts
From the position data of a team’s players, and taking into account the roles defined for each player initially, by taking the average position of a player on a given role, and forming a cost matrix based on the distance of a player to a role, the Hungarian Method can be applied to find the minimum cost for attributing each role to a player, based on its current position.
Definition 6.17
[3] Given a time-series of length N containing the positions of each player on every measured instant, the cost matrix of a player occupying each role, in each instant, can be calculated as follows:
where d(p, q) represents the euclidean distance between two points, p and q, and \(\overline{pos_i}\) represents the average position of the player associated with role i, and \(pos_{p_k}\) represents the position of player k in an instant.
Definition 6.18
[3, 17] Given a cost matrix CM, the minimum cost for each player occupying a specific position p can be given by the following algorithm:

6.9.2 Real Life Examples
The results obtained by Team A in the match are presented in Table 6.15 with intervals of 0.1 s.
6.9.3 General Interpretation
The aim of team’s formation is to classify the regular playing position of players in specific periods or moments of the match [14]. An approach on soccer preprocessed the trajectories of players and segmented the positions into game phases [3, 30]. Another approach was made in field hockey [20].
This measure can be used to visualize the most recurrent position of players in periods of the match and based on the status of possession. Moreover, coaches can use this information to classify the formation of the team and the variations that emerge during the match. The opponents can be also classified by this measure, thus providing information about the spatial mean spatial territory of players and the numeric relationship by sectors. However, it is important to highlight that this measure only represents a static position and other dynamic measures must be used to identify the territory and the typical movements of the players.
References
Alexander Ed, Poularikas, D (1998) The handbook of formulas and tables for signal processing. CRC Press, Boca Raton, FL, USA, pp 73–79
Beezer RA (2008) A first course in linear algebra. Beezer
Bialkowski A, Lucey P, Carr P, Yue Y, Matthews I (2014) Win at home and draw away: automatic formation analysis highlighting the differences in home and away team behaviors. In: Proceedings of 8th annual MIT sloan sports analytics conference. pp 1–7
Cizek V (1970) Discrete hilbert transform. IEEE Trans Audio Electroacoust 18(4):340–343
Clemente FM, Couceiro MS, Martins FML, Mendes RS, Figueiredo AJ (2014) Developing a football tactical metric to estimate the sectorial lines: a case study. Computational science and its applications. Springer, Berlin, pp 743–753
Cullum JK, Willoughby, RA (2002) Lanczos algorithms for large symmetric eigenvalue computations, vol. 1: Theory. SIAM
Duarte R, Araújo D, Correia V, Davids K (2012) Sports teams as superorganisms: implications of sociobiological models of behaviour for research and practice in team sports performance analysis. Sport Med 42(8):633–642
Euler L (1767) Du mouvement d’un corps solide quelconque lorsqu’il tourne autour d’un axe mobile. Mémoires de l’Académie des Sciences de Berlin, 16(1760):176–227
Folgado H, Duarte R, Fernandes O, Sampaio J (2014) Competing with lower level opponents decreases intra-team movement synchronization and time-motion demands during pre-season soccer matches. PloS one 9(5)
Fonseca S, Milho J, Travassos B, Araújo D, Lopes A (2013) Measuring spatial interaction behavior in team sports using superimposed voronoi diagrams. Int J Perform Anal Sport 13(1):179–189
Fonseca S, Milho J, Travassos B, Araújo D (2012) Spatial dynamics of team sports exposed by voronoi diagrams. Hum Mov Sci 31(6):1652–1659
Grehaigne JF, Bouthier D, David B (1997) Dynamic-system analysis of opponent relationships in collective actions in soccer. J Sports Sci 15(2):137–149 PMID: 9258844
Gréhaigne JF, Mahut B, Fernandez A (2001) Qualitative observation tools to analyse soccer. Int J Perform Anal Sport 1(1):52–61
Gudmundsson J, Horton M (2017) Spatio-temporal analysis of team sports. CSUR 50:1–34
Jolliffe I (2002) Principal component analysis. Wiley Online Library
Kenney JF, Keeping ES (1962) Linear regression and correlation. Mathematics of statistics. Van Nostrand, Princeton, NJ, pp 252–285
Kuhn HW (1955) The Hungarian method for the assignment problem. Nav Res Logist Q 2(1–2):83–97
Lemoine A, Jullien H, Ahmaidi S (2005) Technical and tactical analysis of one-touch playing in soccer–study of the production of information. Int J Perform Anal Sport 5(1)
Likas A, Vlassis N, Verbeek JJ (2003) The global k-means clustering algorithm. Pattern Recognit 36(2):451–461
Lucey P, Bialkowski A, Carr P, Morgan S, Matthews I, Sheikh Y (2013) Representing and discovering adversarial team behaviors using player roles. In: 2013 IEEE conference on computer vision and pattern recognition. pp 2706–2713, June
Nagy M, Akos Z, Biro D, Vicsek T (2010) Hierarchical group dynamics in pigeon flocks. Nature 464(7290):890–893
Okabe A, Boots B, Sugihara K, Chiu SN (2000) Spatial tesselations: concepts and applications of Voronoi diagrams. Wiley, New York
Palut Y, Zanone P-G (2005) A dynamical analysis of tennis: concepts and data. J Sports Sci 23(10):1021–1032
Rein R, Raabe D, Perl J, Memmert D (2016) Evaluation of changes in space control due to passing behavior in elite soccer using voronoi-cells. In: Proceedings of the 10th international symposium on computer science in sports (ISCSS)
Ric A, Hristovski R, Gonçalves B, Torres L, Sampaio J, Torrents C (2016) Timescales for exploratory tactical behaviour in football small-sided games. J Sports Sci 34(18):1723–1730 PMID: 26758958
Ric A, Hristovski R, Gonçalves B, Torres L, Sampaio J, Torrents C (2016) Timescales for exploratory tactical behaviour in football small-sided games. J Sports Sci 34(18):1723–1730
Silva P, Vilar L, Davids K, Araújo D, Garganta J (2016) Sports teams as complex adaptive systems: manipulating player numbers shapes behaviours during football small-sided games. SpringerPlus 5(1):191
Taboga M (2012) Lectures on probability theory and mathematical statistics. CreateSpace Independent Pub
Taki T, Hasegawa J (2000) Visualization of dominant region in team games and its application to teamwork analysis. In: Proceedings of the international conference on computer graphics, CGI ’00. IEEE Computer Society, Washington, DC, USA, pp 227–235
Wei X, Sha L, Lucey P, Morgan S, Sridharan S (2013) Large-scale analysis of formations in soccer. In: 2013 international conference on digital image computing: techniques and applications (DICTA), pp 1–8, Nov
Yue Z, Broich H, Seifriz F, Mester J (2008) Mathematical analysis of a football game. part I: individual and collective behaviors. Stud Appl Math 121(3):223–243
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2018 The Author(s)
About this chapter
Cite this chapter
Clemente, F.M., Sequeiros, J.B., Correia, A.F.P.P., Silva, F.G.M., Martins, F.M.L. (2018). Measuring the Tactical Behavior. In: Computational Metrics for Soccer Analysis. SpringerBriefs in Applied Sciences and Technology. Springer, Cham. https://doi.org/10.1007/978-3-319-59029-5_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-59029-5_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59028-8
Online ISBN: 978-3-319-59029-5
eBook Packages: EngineeringEngineering (R0)