
Abstract
The aim of this study was to identify the soft-assembled exploratory hierarchical dynamics of tactical behavior under specific task constraints manipulations. Two teams of four professional male footballers played in small-sided games format against two different teams changing the number of opponents (3, 5, and 7). Resulting trials were analyzed by a combination of systematic observation and a non-differential global positioning system (15 Hz). Tactical patterns of each player formed 37 (4D categories) ×360 s data vectors. Using a soft-assembled hierarchy model by means of two statistical analyses: a hierarchical principal component analysis and the calculation of dynamic overlap order parameter q, we determined the hierarchical structure of the potential landscape of the team players and its dynamic properties. The sequential reduction of each set level of principal components (PCs) revealed one PC as the slowest collective variable forming the global basin of attraction of tactical patterns. The dynamic overlap showed the interaction of two separate time scales. The short time scale lasted a few seconds and corresponded to short-lived emergent task solutions. The long time scale corresponded to the shared tasks of offence and defense lasting tens of seconds. The stationary overlap of the exploratory dynamics showed the decrease on behavioral diversity with an increasing number of opposing players. The temporally nested structure of constraints shaped the emergence of tactical behavior providing a new rationale for practice task design.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In team sports, like football, a spontaneous social order emerges from the interaction of two confronting teams, where players try to adapt their behavior to the immediate changing environment. Ecological approach to cognition and action proposes that the exploratory behavior of athletes can maintain or change the nature and amount of available information in sport context been necessary for successful decision-making and action [1]. This permanent flow of player movement configurations due to task heterogeneity (different players have different immediate tasks to solve) and specific personal constraint reveals the hierarchically soft-assembled action landscape [2] which characterizes the metastability of player’s behavior attaining to a temporarily stable goal through flexible actions. It has been showed that this metastable dynamic landscape is suitable to be changed under specific task constraints promoting the emergence of specific tactical solutions [3–5].
Small-sided games (SSGs) are common training drill used by football coaches because represent the unstable, dynamic and unpredictable nature of football game [6, 7]. However, by allowing manipulations of some specific variables, different player’s behaviors can be elicited. Usually, these kinds of studies were conducted with aim of discovering the effect of task constrains on physical and physiological features (see [8] for review). However, few studies had theoretically explained the emergence of collective behavior in SSGs [9, 10]. To our knowledge, there were no empirical studies that explicitly show and model how tactical behavior is organized on different space-time scales and how task solutions, shared tactical behaviors, and task constraints are linked between them.
Therefore, the aim of this study was to identify the soft-assembled hierarchical structure of tactical behavior and demonstrate the temporally nested structure of game constraints that shape the emergence of offensive and defensive behaviors on different time scales.
2 Method
Eight male football players (age: 26 ± 4.96 years, playing experience: 19.6 ± 4.9years; training schedule of five sessions per week) were dividing into two team of four players. Similarly, the opponents were distributed in two different teams of up to seven players. Goalkeepers participated in the protocol but were excluded from the data analysis. All the SSGs were played on an artificial pitch measuring 40 × 30 m, and in accordance with the official rules of soccer. Three different SSGs were designed changing the magnitude of numerical imbalances and were played in randomized order involving two 3-min periods of play for each condition (360 s):
-
Small numerical advantage (4 vs. 3)
-
Small numerical disadvantage (4 vs. 5)
-
Large numerical disadvantage (4 vs. 7).
Data were gathered through a combination of systematic observation and the use of a 15 Hz non-differential global positioning system (SPI-ProX, GPSports, Canberra, ACT, Australia). The data collected for each player yielded binary data vectors derived from 37 categories, which belonged to the following four categories: tactical actions, inter-player context, pitch zones, and movement speeds (see Table 1); representing the full action configuration during the same time interval (1 s). The value of 1 was ascribed to the active category and a value of 0 to the inactive one. Finally, a binary (Boolean) matrix of size 37 × 360 s was obtained for each player.
The hierarchical principal component analysis (HPCA) procedure allowed reducing the dimensionality from 360 action configuration vectors sequentially to one final slowest collective variable. The number of significant first-level principal components was determined by identifying those that accounted for ≥80 % of the explained variance [11]. The component correlation matrix of the first-order principal components was then subjected to a further higher-order analysis revealing the hypothesized higher-order structure. The component score matrix was used in order to detect the most salient player action configuration that emerged during the game.
The dynamic overlap 〈q d (t)〉 was calculated as an average cosine auto-similarity of the overlap between configurations with increasing time lag to determine the dynamic properties of player’s complex tactical patterns. This measure provides information about the time scale on which the exploratory behavior sufficiently saturates and opens a possibility of defining the scale of short- vs. long-term dynamics. The average dynamic overlap was fitted by the following equation, which is derived for systems with an intricate hierarchical structure (see Eq. 1 [12]):
where q stat is the asymptotic (i.e., stationary) value of the dynamic overlap, t is the time lag, and α is the dynamic exponent. The average dynamic overlap, 〈q d (t)〉, converges to a stationary value, 〈q stat〉, detecting the long-term exploratory breadth of the player. However, it initially shows a descending trajectory with a slope defined by the exponent α, corresponding to the short-term (time scale of seconds) exploratory breadth.
3 Results
Under the Kaiser-Guttman criterion, the HPCA initially revealed between 10 and 14 principal components (PCs) on the first-level PC. Each level PC structure was formed by salient correlated clusters of previous order PCs. A significant dimensional reduction was obtained, resulting in between four- or five-order PCs to analyze. Finally was obtained the highest level PCs with only one principal component which always captures the most robust and stable structure of associations within the data, whereas the lower order PCs are more sensitive to more detailed changes in impinging constraints. The projections of action on the lower order PCs yielded a metastable dynamic landscape, where certain action configuration of players attract the system dwelling few seconds inside before switch to another local metastable configuration attractor basin (see Fig. 1, as an example).

Typical time evolution of the potential landscape of action configurations of one player in 4 vs. 3. As time passes configurations are attracted to and repelled from certain PC subsets. Dark areas are attracting, while pale and white are repelling regions
Under the influence of numerical imbalance of opponent team, we can detect some differences in the slowest collective variable (highest order of PCs) that contained the dominant long-term persistent action configurations. While under small numerical advantage offensive actions were predominant, playing in numerical inferiority most of player offer to his teammate’s offensive coverage in order to maintain the ball and the difficulties to go forward. In 4 vs. 7 it can be seen that some players decided to perform demarks going in depth as unique offensive strategy. Constrained by the increased number of the opponents, the teams played nearer to their goal. Due to the density of opponents, the players performed their actions in contexts surrounded by opponents, placed between advanced and rear opponent, with high risk to lose the ball possession. The speed of action movements decreased with the increasing number of opponents.
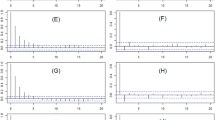
The average dynamic overlap 〈q d (t)〉 showed a characteristic behavior involving relaxation to an average stationary value 〈q stat〉. It can be seen in Fig. 2 that for different task conditions a different stationary value was attained in the lag interval from around 15–30 s. The first quickly relaxing part of the curve shows that exploration of different game patterns by individual players exists on a time scale of seconds. Over a scale of a few tens of seconds, however, the exploratory dynamics slows down and attains stationary values. On even larger time scales (hundreds of seconds), the degree of exploration is stationary, partly repeating the already created tactical patterns, showing a consistent increase in the stationary overlap of the tactical patterns with an increasing number of opposing players (4 vs. 3 = 0.202 ± 0.015; 4 vs. 5 = 0.230 ± 0.025; 4 vs. 7 = 0.254 ± 0.029) [15].

Profile of the average dynamic overlap 〈q d (t)〉 of each condition for different time lags; these dynamics unfold over three time scales (from seconds to several minutes)
4 Discussion
Results demonstrated that practice task constraints can be organized in a way that enables maximization of dynamic metastability affording players maximal ease and flexibility of discovering and switching between action configurations [3–5]. Therefore, constraining SSGs with modifying numerical imbalanced conditions change the probabilities of emergent tactical patterns and the dynamics of exploration in different regions of the task solution space. In that sense, the system’s capacity for exploration captures all the individual movement solutions for an immediate or more stable task goal [2] yielding a soft-assembled hierarchical structure of movement patterns which attract the system with different characteristic time scales.
However, each level processes is interlinked in a kind of circular causality, since the large-scale task goal (avoid the goal) governs the shorter-small scale task solution (pass the ball, marking the opponent, etc.), and vice versa [16, 17].
5 Scientific Validation
This paper has been unanimously validated in a collaborative review mode with the following reviewers:
-
Paul Rodriguez. UC San Diego, USA
-
Ricardo Fernandes. Faculdade de Desporto, Universidade do Porto, Portugal
-
Ludovic Seifert. Faculty of Sports Sciences, University of Rouen, France.
References
Araujo D, Davids K, Hristovski R (2006) The ecological dynamics of decision making in sport. Psychol Sport Exerc 7:653–676
Hristovski R, Davids K, Araújo D, Passos P (2011) Constraints-induced emergence of functional novelty in complex neurobiological systems: a basis for creativity in sport. Nonlinear Dyn Psychol Life Sci 15:175–206
Hristovski R, Davids K, Araújo D, Button C (2006) How boxers decide to punch a target: emergent behaviour in nonlinear dynamical movement systems. J Sport Sci Med 5:60–73
Pinder RA, Davids K, Renshaw I (2012) Metastability and emergent performance of dynamic interceptive actions. J Sci Med Sport 15:437–443
Torrents C, Ric A, Hristovski R (2015) Creativity and emergence of specific dance movements using instructional constraints. Psychol Aesthet Creat Arts 9:65–74
Davids K, Araújo D, Correia V, Vilar L (2013) How small-sided and conditioned games enhance acquisition of movement and decision-making skills. Exerc Sport Sci Rev 41:154–161
Passos P, Milho J, Fonseca S, Borges J, Araújo D, Davids K (2011) Interpersonal distance regulates functional grouping tendencies of agents in team sports. J Mot Behav 43:155–163
Aguiar MVD, Botelho GMA, Gonçalves BSV, Sampaio JE (2013) Physiological responses and activity profiles of football small-sided games. J Strength Cond Res 27:1287–1294
Sampaio JE, Lago C, Gonçalves B, Maçãs VM, Leite N (2014) Effects of pacing, status and unbalance in time motion variables, heart rate and tactical behaviour when playing 5-a-side football small-sided games. J Sci Med Sport 17:229–233
Frencken W, Lemmink K, Delleman N, Visscher C (2011) Oscillations of centroid position and surface area of soccer teams in small-sided games. Eur J Sport Sci 11:215–223
Joliffe IT (2002) Principal component analysis. Springer, New York
Sibani P, Dall J (2003) Log-Poisson statistics and full aging in glassy systems. EPL 64:8
Costa IT, Garganta J, Greco PJ, Mesquita I, Maia J (2011) System of tactical assessment in soccer (FUT-SAT): development and preliminary validation. System 7:69–83
Folgado H, Duarte R, Fernandes O, Sampaio J (2014) Competing with lower level opponents decreases intra-team movement synchronization and time-motion demands during pre-season soccer matches. PLoS One 9:e97145
Ric A, Hristovski R, Gonçalves B, Torres L, Sampaio J, Torrents C (2016) Timescales for exploratory tactical behaviour in football small-sided games. J Sports Sci 34:1723
Balague N, Torrents C, Hristovski R, Davids K, Araújo D (2013) Overview of complex systems in sport. J Syst Sci Complex 26:4–13
Araújo D, Passos P, Esteves P, Duarte R, Lopes J, Hristovski R, Davids K (2015) The micro-macro link is understanding sport tactical behaviours: integrating information and action at different levels of system analysis in sport. Mov Sport Sci 2015:1–32
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Ric, A., Torrents, C., Hristovski, R. (2017). Emerging Collective Shared Behaviors from Individual Exploration in Football Small-Sided Games. In: Bourgine, P., Collet, P., Parrend, P. (eds) First Complex Systems Digital Campus World E-Conference 2015. Springer Proceedings in Complexity. Springer, Cham. https://doi.org/10.1007/978-3-319-45901-1_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-45901-1_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45900-4
Online ISBN: 978-3-319-45901-1
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)