
Abstract
Fast Fourier Transforms (FFTs) are exploited in a wide variety of fields ranging from computer science to natural sciences and engineering. With the rising data production bandwidths of modern FFT applications, judging best which algorithmic tool to apply, can be vital to any scientific endeavor. As tailored FFT implementations exist for an ever increasing variety of high performance computer hardware, choosing the best performing FFT implementation has strong implications for future hardware purchase decisions, for resources FFTs consume and for possibly decisive financial and time savings ahead of the competition. This paper therefor presents gearshifft, which is an open-source and vendor agnostic benchmark suite to process a wide variety of problem sizes and types with state-of-the-art FFT implementations (fftw, clFFT and cuFFT). gearshifft provides a reproducible, unbiased and fair comparison on a wide variety of hardware to explore which FFT variant is best for a given problem size.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Fast Fourier transforms (FFTs, [31]) are at the heart of many signal processing and phase space exploration algorithms. Examples for their substantial usage include image reconstruction in life sciences [27, 28], amino acid sequence alignment in bioinformatics [22], phase space reduction for weather simulations [23], option price analysis and prediction in financial mathematics [19] and machine learning [5] to just name a few.
An FFT is a fast implementation of the discrete Fourier transform which is a standard text-book mathematical procedure. The forward transform is a mapping from an array x of n complex numbers in the time domain to an array X of n complex numbers in the frequency domain (referred to as Fourier domain):
with k being an integer index within \(0 \le k < n\) and the imaginary unit \({\mathrm {i}}^2=-1\). This operation was found to be computable in \(\mathcal {O}(n \log n)\) complexity by Cooley-Turkey [8], who rediscovered findings of Gauss [16]. The basis of the Cooley-Turkey approach is the observation that the DFT of size n can be rewritten by smaller DFTs of size \(n_1\) and \(n_2\) by the factorization of \(n=n_1n_2\). Given the indices \(j=j_1n_2{+}j_2\) and \(k=k_1{+}k_2n_1\), Eq. (1) can be re-expressed as:
Equation (2) describes a decomposition that can be performed recursively [15]. Here, \(n_1\) is denoted radix as it refers to \(n_1\) transforms of size \(n_2\). These smaller transforms are combined by a butterfly graph with \(n_2\) DFTs of size \(n_1\) on the outputs of the corresponding sub-transforms. Radix-2 DFTs (n being a power of two) are mostly implemented with the Cooley-Tukey algorithm [8]. Stockham’s formulations of the FFT can be applied [29] to avoid incoherent memory accesses. Arbitrary and mixed radices can be tackled with the prime-factorization or Chirp Z-transform implemented by the Bluestein’s algorithm [6].
The top ten list of the fastest worldwide computer installations (Top500 [24]) shows that the used hardware is by far not homogeneous in terms of vendor and composition. This trend can be even more observed in practice, where library architects and domain specialists are confronted with an essential question: Which FFT implementation works best on what hardware?
With increasing experimental data production [18] and simulation output bandwidths [23], input data to FFT libraries in the order of gigabytes becomes the standard. With the advent of graphics processing units (GPUs) for scientific computing around the beginning of the 21st century and the subsequent availability of general purpose programming paradigms to program these [11], vendor-specific and open-source libraries to perform FFTs on accelerators emerged (cuFFT [25] by Nvidia, open-source clFFT [3]) to offer performance which supersedes traditional high-performance implementations running on standard Central Processing Units (CPUs) such as the open-source fftw library [15] or the Intel specific MKL [20].
To our surprise, comprehensive and peer-reviewed benchmarks of FFT implementations across different hardware platforms have not been published extensively. Either only specific hardware is chosen for the benchmark [2, 12, 26] or only specific FFT implementation variants are tested [9, 10]. In addition, many performance benchmarks are tied to domain-specific implementations [14] that either lack comprehensiveness or the ability to map the results obtained to other implementation requirements.
Thus, a new open-source benchmark package called gearshifft [17] has been developed. It is able to benchmark available state-of-the-art FFT libraries in a reproducible, automated, comprehensive and vendor-independent fashion on CPUs and GPUs. gearshifft helps library authors and domain-specific developers to choose the best FFT library available. The discussion above motivates the following design goals of gearshifft:
-
open-source and free code
-
standardized output format for downstream statistical analysis
-
state-of-the-art build system
-
open and extensible architecture with generic interface
-
community-ready and vendor independent project infrastructure through version control and public accessibility
Given the multitude of mathematical formulations and the heterogeneity of hardware, gearshifft approaches the challenge of benchmarking a variety of FFT libraries from a user perspective. This means, that the following parameters should be easy to study:
-
FFT dimension and radix-type (e.g. \(32 \times 32 \times 32\) as radix-2 3D FFT)
-
transform kinds, i.e. real-to-complex or complex-to-complex transforms
-
precision, i.e. 32-bit or 64-bit IEEE floating point number representation
-
memory mode
-
in-place: the input data structure is used for storing the output data (low memory footprint and low bandwidth are to be expected)
-
out-of-place: where the transformed input is written to a different memory location than where the input resides (high memory footprint and high bandwidth are to be expected)
-
-
transform direction, i.e. forward (from discrete space to frequency space) or backward (from frequency space to discrete space)
The remainder of this article is organized as follows: the C++ implementation of gearshifft is discussed in Sect. 2 after an introduction to modern FFT APIs. The largest part of the paper is dedicated to the presentation of first results in Sect. 3, after which our conclusions are presented in Sect. 4.
2 Implementation
2.1 Using a Modern FFT Library
Before discussing the design of gearshifft, a brief introduction into the use and application programming interfaces (APIs) of modern FFT libraries is required to illustrate the design choices made. Many FFT libraries today, and particularly those used in this study, base their API on fftw 3.0.
Here, in order to execute an FFT on a given pointer to data in memory, a data structure for plans has to be created first using a planner. For this, the FFT problem is defined in terms of rank (1D, 2D or 3D), shape of the input signal (the dimensional extent), type of the input signal (single or double precision of real or complex inputs), type of the transformation (real-to-complex, complex-to-complex, real-to-half-complex) and memory mode of the transformation (in-place versus out-of-place). These parameters describing the FFT problem are then used as input to the planner.
The planner is a piece of code inside fftw that tries to find the best suited radix factorization based on the shape of the input signal. By default, it then performs several FFTs derived from the mathematical descriptions discussed in Sect. 1 on the input data to sample the runtime of different FFT implementations available inside fftw. This ensemble of runtimes is then used to find the optimal FFT implementation to use. After the plan has been created, it is used to execute the FFT itself.

Listing 1 illustrates the fftw API for a single precision real-to-complex out-of-place transform. fftw offers the freedom to choose the degree of optimization for finding the most optimal FFT implementation for the signal at hand by means of the planner flag, also referred to as plan rigors. Listing 1 uses the FFTW_ESTIMATE flag as an example, which is described in the fftw manual [13]:
“FFTW_ESTIMATE specifies that, instead of actual measurements of different algorithms, a simple heuristic is used to pick a (probably sub-optimal) plan quickly. With this flag, the input/output arrays are not overwritten during planning.”
fftw offers five levels for this planning flag, where two further descriptions are given here:
“FFTW_MEASURE tells fftw to find an optimized plan by actually computing several FFTs and measuring their execution time. Depending on your machine, this can take some time (often a few seconds).
FFTW_WISDOM_ONLY is a special planning mode in which the plan is only created if wisdom is available for the given problem, and otherwise a NULL plan is returned.”
In fftw terminology, wisdom is a data structure representing a more or less optimized plan for a given transform. The fftw_wisdom binary, that comes with the fftw bundle, generates hardware adapted wisdom files, which can be loaded by the wisdom API into any fftw application. cuFFT and clFFT follow this API mostly, only discarding the plan rigors and wisdom infrastructure, cp. Listing 2.

2.2 The Architecture of gearshifft
gearshifft is developed as an open-source framework using C++ (following the 2014 ISO standard [21]) and the Boost Unit Test Framework (UTF, [7]). One goal is to have a unified benchmark infrastructure and an extensible set of FFT library clients. The benchmark framework is independent of the used FFT library and provides the measuring environment, data handling and processing of results. gearshifft involves template meta-programming for a compile-time constant interface between the clients and the benchmark framework. Such a generic approach is necessary to obtain comparable results between FFT libraries and reproducible data for later statistical analysis while keeping code redundancy and overhead at a minimum.
In gearshifft a benchmark is meant to collect performance indicators of the operations in Table 1 defining the interface for the FFT clients. Different parameters such as precision, FFT extents, transform variant, device type or FFT library relate to different benchmarks. gearshifft controls many of them by command line arguments. The FFT libraries are related to different gearshifft binaries (gearshifft_cufft, ...). For the full documentation of gearshifft the reader is referred to [17].
There are common interfaces for the context management and for the FFT workflow. The user has to implement the context and the FFT client class. The create and destroy context methods of the client encapsulate time-consuming device and library initialization, which are measured separately and run only once. The library only must be initialized within the FFT client when the library stores plan information (cp. fftw wisdoms). The client’s context class derives from ContextDefault which enables to access and extend the program options.

The FFT client implementation in Listing 3 is instantiated once per benchmark run and follows the resource allocation is initialization (RAII) idiom [30]. gearshifft invokes the FFT client methods listed in Table 1 to perform the benchmarks and to populate the benchmark data. The FFT client can assign user-defined template types to create different FFT client classes to mimic various use cases.
Depending on the FFT library, after a forward transform the same plan handle might be recreated for backward transform. This saves memory as there is only one plan allocated at any point in time. For example, a cuFFT plan allocation can be several times bigger than the actual signal data for the FFT. fftw can overwrite input and output buffers during the planning phase, when e.g. FFTW_MEASURE is used. Afterwards, the buffers can be filled with data. In turn, this plan handle cannot be recreated later on, as the result buffer of the previous plan would be overwritten at plan recreation. gearshifft’s compile-time interface supports this use case, where both plans are allocated before the round-trip FFT starts. The gearshifft interface also allows library-specific time measurements, which is only implemented for the cuFFT library at the moment, where CUDA events measure the runtime on GPU. For fftw and clFFT, the CPU timer exposed by the C++14 chrono header is used.

Listing 4 shows a type definition for the user implemented class MyFFTClient and specifies an in-place-real FFT (cp. Listing 3). This type is added to a list for the benchmark runner, as demonstrated in benchmark.cpp (Listing 5). The gearshifft::List is a compile-time constant list, which holds the different template instantiations of an FFT client. FFT_Is_Normalized denotes a compile time flag if the backward transformed data needs to be normalized in order to achieve identity with the input.


The benchmark framework of gearshifft using Boost UTF and a realized FFT interface; Here, only FFT interfaces are shown, that are measured (gray operations are measured by device timers if provided); Context also has an implicit interface, which is omitted here.
The back-end of gearshifft uses the Boost Unit Test Framework to generate the benchmark instances within a tree data structure, which is referred to as the benchmark tree. The measurement layout and benchmark framework are illustrated in Fig. 1. One single run comprises time measurement of each operation (allocate, ...). The total time measures all from allocate to destroy. The size of the allocated buffers and the memory information of the FFT library (if available) is recorded as well. The functor FFT calls the FFT client operations wrapped with time measurements. The input data buffer, filled with a see-saw function in [0, 1) in BenchmarkData, is held by the BenchmarkExecutor. A copy is given to the FFT functor in each run and is used for the output. For each benchmark configuration a number of warmups and benchmark repetitions is performed. After the last benchmark run the round-trip transformed data is validated against the original input data. The error \(\varepsilon \) is computed by the sample standard deviation of input and round-trip output. When that error is greater than \(10^{-5}\), the benchmark is marked as failed and gearshifft continues with the next configuration in the benchmark tree.
gearshifft adapts the API of the different FFT libraries to a common interface. The FFT functor defines the interface of the common FFT workflow. This pattern refers to Wrapper Facades and Static Adapter design pattern which provides static polymorphism at compile-time [4]. Currently, gearshifft implements three different FFT libraries, cuFFT (CUDA runtime, [25]) for Nvidia GPUs, clFFT (OpenCL runtime, [3]) for CPU and GPUs and fftw for CPU (C/C++ runtime, [15]). By this selection, an accelerator-only, a mixed CPU-GPU and a CPU-optimized library is covered. The cmake build system is used to setup build paths to construct one executable for each supported FFT library found by cmake as well as for collecting the include paths during the build process and library locations for linking later on. There are options for disabling FFT libraries or pointing to non-standard installation paths and to configure compile-time constants such as the error-bound as well as the number of warmups and repetitions.
For the command-line arguments, Boost is utilized, particularly for benchmark list creation and selection. There are several gearshifft program options to control benchmark settings, for example:

Here, the clFFT benchmarks would first run a \(128 \times 128\)-point FFT and then a 1024-point FFT, performing in-place transforms with real input data in single-precision. The default setting instructs gearshifft to use all CPU cores and to store the results into result.csv. The gearshifft benchmark selection syntax supports wildcards. The first wildcard * relates to the title of the FFT client (ClFFT in this example). The second one refers to the FFT extents.
3 Results
3.1 Experimental Environment
This section will discuss the results obtained with gearshifft v0.2.0 on various hardware in order to showcase the capabilities of gearshifft. Based on the applications in [27, 28], 3D real-to-complex FFTs with contiguous single-precision input data are chosen for the experiments. If not stated, this is the transform type assumed for all illustrations hereafter. Expeditions into other use cases will be made where appropriate. The curious reader may rest assured that a more comprehensive study is possible with gearshifft, however the mere multiplicity of all possible combinations and use cases of FFT render it neither feasible nor practical to discuss all of them here.
This study concentrates on three modern and current FFT implementations available free of charge: fftw (3.3.6pl1, on x86 CPUs), cuFFT (8.0.44, on Nvidia GPUs) and clFFT (2.12.2, on x86 CPUs or Nvidia GPUs). This is considered as the natural starting point of developers beyond possible domain specific implementations. It should be noted, that this will infer not only a study in terms of hardware performance, but also how well the APIs designed by the authors of fftw, clFFT and cuFFT can be used in practice.
The results presented in the following sections were collected on three hardware installations: All systems presented in Table 2 will be used for the benchmarks in this section. Access was performed via an ssh session without running a graphical user interface on the target system. All measurements used the GNU compiler collection (GCC) version 5.3.0 as the underlying compiler. All used GPU implementations on Nvidia hardware interfaced with the proprietary driver and used the infrastructure provided by CUDA 8.0.44 if not stated otherwise. After a warmup step a benchmark is executed ten times. From this, the arithmetic mean and sample standard deviations are used for most of the figures.

Time-to-solution measured in gearshifft (cuFFT), in a standalone cuFFT application using multiple timer objects and in a standalone application using one timer object (standalone-tts) for a single-precision in-place real-to-complex round-trip FFTs on the K80 [33].
3.2 Overhead of gearshifft
gearshifft is designed to be a lightweight framework with a thin wrapper for the FFT clients, where the interface between back-end and front-end is resolved at compile-time. Performance indicators of each benchmark are collected and buffered to be processed after the last benchmark finished. For validation purposes, a cuFFT standalone code [17] was created that provides a timer harness like gearshifft (referred to as standalone). In addition, the time to solution of a straightforward implementation of a round-trip FFT was measured as well (referred to as standalone-tts). Both invoke a warm-up step and ten repetitions of the entire round-trip FFT process. Figure 2 shows the impact of the gearshifft internal time measurement with cuFFT for two input signal sizes. Figure 2a illustrates that the time measurement distribution of gearshifft overlaps with standalone code using multiple timers. A comparison of gearshifft and standalone-tts visually shows a shift in the average obtained timing result (most likely due to timer object latencies), the scale of this shift resides in the regime below \({2}{\%}\) which we consider negligible. We make this strong claim also because one of the goals of gearshifft is measuring individual runs of the benchmark for downstream statistical analysis, thus using one timer object would prohibit this core feature of the benchmark. Figure 2b shows the impact of larger input signals on the time measurement result. Here, the difference between gearshifft, standalone and standalone-tts decreases even more and converges to a permille level (the longer duration of the benchmark mitigates timer object latencies).
3.3 Time to Solution
The discussion begins with the classical use case for developers that might be accustomed to small size transforms. As such, an out-of-place transform with powerof2 3D signal shapes will be assumed. The memory volume required for this operation amounts to the real input array plus an equally shaped complex output array of the same precision. Figure 3 reports a comparison of runtime results of powerof2 single-precision 3D real-to-complex forward transforms from fftw and cuFFT. It is evident that given the largest device memory available of 16 GiB, the GPU data does not yield any points higher than 8 GiB. The more recent GPU models supersede fftw which used all \(2 \times 12\) CPU Intel Haswell cores. Any judgment on the superiority of cuFFT over fftw can be considered premature at this point, as fftw was used with the FFTW_ESTIMATE planner flag.

Time-to-solution for powerof2 3D single-precision real-to-complex out-of-place forward transforms using fftw (FFTW_ESTIMATE) and cuFFT. (b) shows the same data as (a) but in a log10–log2 scale.

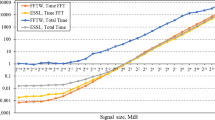
fftw on Intel E5-2680v3 CPU with FFTW_ESTIMATE, FFTW_MEASURE and FFTW_WISDOM_ONLY computing powerof2 3D single-precision real-to-complex in-place forward transforms. (a) reports the time to solution, whereas (b) shows the time spent for the execution of the forward transform only. Both figures use a log10–log2 scale.
Figure 4 compares the time-to-solution to the actual time spent for the FFT operation itself. FFTW_MEASURE imposes a total runtime penalty of 1 to 2 orders of magnitude with respect to FFTW_ESTIMATE. It however offers superior performance considering FFT execution time compared to FFTW_ESTIMATE. To compare FFTW_ESTIMATE or FFTW_MEASURE with plans using FFTW_WISDOM_ONLY, wisdom files are generated with the fftw_wisdom binary. fftw_wisdom precomputed plans for a canonical set of sizes (powers of two and ten up to \(2^{20}\)) in FFTW_PATIENT mode, which in all took about one day on Taurus [33] using (see [13] for command-line flag details):
As during plan creation, the wisdom has to be loaded from disk only, the planning times for calling the planner with FFTW_WISDOM_ONLY are drastically reduced. Figure 4b shows that the user is rewarded by pure FFT runtimes of less than an order of magnitude for small signal sizes. Unexpectedly, the FFT runtimes become larger than those of FFTW_ESTIMATE for input signal sizes of more than 32 KiB, which apparently contradicts the FFTW_PATIENT setting which should find better plans than FFTW_MEASURE. It must be emphasized that the planning times for FFTW_MEASURE become prohibitively long and reach minutes for data sets in the gigabyte range. This is a well-known feature of fftw as the authors note in [15]:
“In performance critical applications, many transforms of the same size are typically required, and therefore a large one-time cost is usually acceptable.”

Time-to-plan for powerof2 single-precision in-place real-to-complex forward transforms using fftw (Intel E5-2680v3 CPU), cuFFT (K80 GPU) and clFFT (K80 GPU). (a) reports the complete time to plan for 3D FFTs and (b) for 1D FFTs. “None” refers to the planning with cuFFT or clFFT as they do not support the plan rigor concept. Both figures use a log10–log2 scale.
gearshifft allows one to dissect this problem further and isolate the planning time only. Figure 5 illustrates the problem to its full extent. FFTW_MEASURE consumes up to 3–4 orders of magnitude more planning time than other plan-rigors and plans from GPU based libraries. The 3D planning is compared with its counterpart in 1D (see Fig. 5b). It is important to note that fftw planning in 1D appears to be very time consuming as the FFTW_MEASURE curve is very steep compared to Fig. 5a. At input sizes of 128 MiB in 1D, the planning phase exceeds the duration of 100s. The multi-threaded environment could be a problem for fftw (compiled against OpenMP): when using 24 threads in fftw the time to solution with FFTW_MEASURE was up to \(6{\times }\) slower than using 1 thread. Even worse, FFTW_PATIENT was up to \(50{\times }\) slower than in a single-thread environment. Unfortunately, the number of threads used for wisdoms, which usually run in FFTW_PATIENT mode, must be equal to the ones used by the client later on.
In practice, this imposes a challenge on the client to the fftw API. Not only is the time to solution affected by this behavior which is a crucial quantity in FFT-heavy applications. Moreover, in an HPC environment the runtime of applications needs to be known before executing them in order to allow efficient and rapid job placement on compute resources. From another perspective, this asserts a development pressure on the developer interfacing with fftw as she has to create infrastructure in order to perform the planning of fftw only once and reuse the resulting plan as much as possible. Furthermore, based on these observations of Figs. 4 and 5 weighing plan time versus execution time, it becomes more and more unclear for a user of fftw which plan rigor to use in general.
3.4 Comparing CPU versus GPU Runtimes
The last section finished by discussing a design artifact, that the fftw authors introduced in their API and which other FFT libraries adopted. Another important and common question is whether GPU accelerated FFT implementations are really faster than their CPU equivalents. Although this question cannot be answered comprehensively in our study, there are several aspects to be explored. First of all, modern GPUs are connected via the PCIe bus to the host system in order to transfer data, receive instructions and to be supplied with power. This imposes a severe bottleneck to data transfer and is sometimes neglected during library design. Therefore, the time for data transfer needs to be accounted for or removed from the measurement. gearshiffts results data model offers access to each individual step of a transformation, see Fig. 1. Hereby it is possible to isolate the runtime for the FFT transform.

Time for computing powerof2 out-of-place single-precision real-to-complex forward transforms for 3D and for 1D shapes. Both figures use a log10-versus-log2 scale. Curves on the Intel E5-2680v3 based node were obtained with fftw, the data on Nvidia GPUs was obtained with cuFFT and clFFT.
Figure 6 shows the runtime spent for computing the forward FFT for real single precision input data. This illustration is a direct measure for the quality of the implementation and the hardware underneath. For the 3D case in Fig. 6a fftw seems to provide compelling performance if the input data is not larger than 1 MiB on a double socket Haswell Intel Xeon E5 CPU. Above this limit, the GPU implementations offer a clear advantage by up to one order of magnitude. The current Pascal generation GPUs used with cuFFT provide the best performance, which does not come by surprise as both cards are equipped with GDDR5X or HBM2 memory which are clearly beneficial for an operation that yields rather low computational complexity such as the FFT. In the 1D case of Fig. 6b, the same observations must be made with even more certainty. The cross-over of fftw and the GPU libraries occurs at an earlier point of 64 KiB.
Another observation in Fig. 6a is that the general structure of the runtime curves of GPU FFT implementations follows an inverse roofline curve [32]. That is for input signals smaller than the roofline turning point at 1 MiB the FFT implementation appears to be of constant cost, i. e. to be compute bound. Above the aforementioned threshold, the implementation appears to be memory bound and hence exposes a linear growth with growing input signals which corresponds to the \(\mathcal {O}(n \log n)\) complexity observed in Sect. 1 and validates the algorithmic complexity in [32] as well.
Finally, it is not to our surprise that the clFFT results reported in Fig. 6 cannot be considered optimal. As we executed clFFT on Nvidia hardware interfacing with the OpenCL runtime coming with CUDA and interfaced to the Nvidia proprietary driver, OpenCL performance can not be considered a first-class citizen in this environment. Only in Fig. 6b, the clFFT runtimes are below those of fftw. These experiments should be repeated on AMD hardware where the OpenCL performance is expected to be better.
3.5 Non-powerof2 Transforms
It is often communicated, that input signals should be padded to powerof2 shapes in order to achieve the highest possible performance. With gearshifft the availability and quality of the common mathematical approaches across many FFT libraries can now be examined in detail. For the sake of brevity, only the results for fftw (Intel E5-2680v3 CPU) and cuFFT (P100) are presented here.

fftw and clFFT on Intel E5-2680v3 CPU with 24 threads versus cuFFT on P100 GPU computing single-precision real-to-complex out-of-place forward transforms of 3D shapes. Both figures use a log10-versus-log2 scale.
Figure 7 confirms that powerof2 transforms are generally faster than radix357 and oddshape transforms. Excluding the long planning time fftw offers the fastest FFT runtime until the turning point at 1 MiB, see Fig. 7a. However, looking at time to solution in Fig. 7b clFFT on the CPU outperforms fftw by 1 to 2 orders of magnitude due to the long planning times of fftw. At very small input signal sizes, cuFFT lacks behind clFFT on the CPU until 1 KiB for powerof2 shapes, where cuFFT offers superior or comparable runtimes thereafter. clFFT only offers support for powerof2 and radix357 shape types but has almost the same performance for either. cuFFT shows an FFT runtime difference of up to one order of magnitude on the P100 for large input signals (Fig. 7a) of powerof2 and oddshape type, where the time to solution converges due to planning and transfer penalties (Fig. 7a).
For a large range of input signal sizes between \(2^{-10}\) MiB \(2^7\) MiB a padding to powerof2 might be justified when using cuFFT if enough memory is available on the device. For fftw non-powerof2 signals can be padded at signal sizes above \(2^{-3}\) MiB = 128 KiB. clFFT on CPU is only a good choice, when short planning times are more important than transform runtime. clFFT provides similar performance on the P100 as on CPU, but it is not shown here.
3.6 Data Types
It is a common practice that complex-to-complex transforms are considered more performant than real-to-complex transforms. Therefore, in order to transform a real input array, a complex array is allocated and the real part of each datum is filled with the signal. The imaginary part of each datum is left at 0.
Figure 8 restricts itself to larger signal sizes in order to aid the visualization. Note that in Fig. 8a, a data point at the same number of elements of the input signal does have different size in memory. fftw exposes a factor of 2 and more of runtime difference for signals larger than \(2^{15}\) elements comparing real and complex input data types in Fig. 8a. Below this threshold, the performance can be considered identical except for very small input signals although real FFTs always remain faster than complex ones. The situation is different for cuFFT, where the overall difference is smaller in general. In the compute bound region of cuFFT (below \(2^{19}\) elements), complex transforms perform equally well than real transforms given the observed uncertainties. In the memory bound region (above \(2^{19}\) elements), real transforms can be a factor of 2 ahead of complex ones which is clearly related to twice the memory accesses.
If single-precision can be used instead of double-precision, then the possible performance gain can be estimated by Fig. 8b. On the high grade server GPU, the Nvidia Tesla P100, the performance difference remains around \(2{\times }\) in the memory bound region due to double the memory bandwidth required. The results for fftw vary more around 1.5 to 2.5 fold regressions between single and double precision inputs across a wider input signal range.

Time for computing a forward FFT using 3D powerof2 input signals using fftw and cuFFT on respective hardware versus the number of elements in the input signal. (a) computes a real-to-complex transform and compares it to a complex-to-complex transform for single precision input data, whereas (b) shows a real-to-complex transform for either single or double precision. Both figures use a log2-versus-log2 scale.
4 Summary
With this paper gearshifft is presented to the HPC community and other performance enthusiasts as an open-source, vendor-independent and free FFT benchmark suite for heterogeneous platforms. gearshifft is a C++14 modular benchmark code that allows to perform forward and backward FFT transforms on various types of input data (both in shape, memory organization, precision and data type). gearshifft’s design offers an extensible architecture to accommodate FFT packages with very low overhead. gearshifft’s design choices address both FFT practitioners, FFT library developers, HPC admins or integrators and decision makers supporting a wide range of use cases.
To showcase the capabilities of gearshifft, a first study of three common FFT libraries, fftw, clFFT and cuFFT is presented. The performances of CPU based implementations Haswell Xeon CPUs to state-of-the-art Pascal generation Nvidia GPUs are compared. The results indicate that for input signal sizes of less than 1 MiB, the CPU implementation is superior whereas for larger input data size the GPU offers better turn-around. The difference between runtimes of powerof2, radix357 and power-of-19 shaped input data was demonstrated to be negligible for fftw and non-negligible for cuFFT transforms used in this study. The results further indicate runtime differences when using complex versus real arrays and when comparing double versus single precision data types.
As we warmly welcome contributions of benchmarks from various pieces of hardware, we hope to extend the gearshifft repository with many more data sets from platforms used in the HPC arena of today and tomorrow. It is planned to run gearshifft on non-x86 hardware to establish a basis for hardware performance comparisons. Connected to this, we plan to explore more state-of-the-art FFT libraries such as Intel IPPS, Intel MKL, AMD’s rocFFT, cusFFT etc. It is a future task to consolidate the benchmark data structure and to open another benchmark paths for e.g. FFT callbacks, so that many more analyses are possible than were presented in this paper both in terms of performance exploration as well as energy consumption.
References
Helmholtz-Zentrum Dresden-Rossendorf Abteilung IT-Infrastruktur. Hypnos. http://www.hzdr.de/db/Cms?pOid=12231&pNid=852
Akin, B., Franchetti, F., Hoe, J.C.: FFTs with near-optimal memory access through block data layouts: algorithm, architecture and design automation. J. Sig. Proc. Syst. 85, 67–82 (2015)
AMD. clFFT. A software library containing FFT functions written in OpenCL (2016). https://github.com/clMathLibraries/clFFT
Bachmann, P.: Static and metaprogramming patterns and static frameworks: a catalog. An application. In: Proceedings of the 2006 Conference on Pattern Languages of Programs, PLoP 2006, pp. 17:1–17:33. ACM, Portland (2006). ISBN: 978-1-60558-372-3. doi:10.1145/1415472.1415492
Bahrampour, S., Ramakrishnan, N., Schott, L., Shah, M.: Comparative study of caffe, neon, theano, and torch for deep learning. In: CoRR abs/1511.06435 (2015). http://arxiv.org/abs/1511.06435
Bluestein, L.: A linear filtering approach to the computation of discrete Fourier transform. IEEE Trans. Audio Electroacoust. 18(4), 451–455 (1970). doi:10.1109/TAU.1970.1162132. ISSN: 0018–9278
C++ Boost. Libraries (2016). http://www.boost.org/
Cooley, J.W., Tukey, J.W.: An algorithm for the machine calculation of complex Fourier series. Math. Comput. 19(90), 297–301 (1965)
Danalis, A., Marin, G., McCurdy, C., Meredith, J.S., Roth, P.C., Spafford, K., Tipparaju, V., Vetter, J.S.: The scalable heterogeneous computing (SHOC) benchmark suite. In: Proceedings of the 3rd Workshop on General-Purpose Computation on Graphics Processing Units, pp. 63–74. ACM (2010)
Dongarra, J., Luszczek, P.: HPC Challenge: Design, History, and Implementation Highlights. In: Contemporary High Performance Computing: From Petascale Toward Exascale (2013)
Du, P., Weber, R., Luszczek, P., Tomov, S., Peterson, G., Dongarra, J.: From CUDA to OpenCL: towards a performance-portable solution for multi-platform GPU programming. Parallel Comput. 38(8), 391–407 (2012)
Eleftheriou, M., Fitch, B., Rayshubskiy, A., Ward, T.J.C., Germain, R.: Performance measurements of the 3D FFT on the Blue Gene/L supercomputer. In: Cunha, J.C., Medeiros, P.D. (eds.) Euro-Par 2005. LNCS, vol. 3648, pp. 795–803. Springer, Heidelberg (2005). doi:10.1007/11549468_87
FFTW User Manual, 29 November 2016. http://www.fftw.org/fftw3_doc/index.html#Top
Fialka, O., Cadik, M.: FFT and convolution performance in image filtering on GPU. In: Tenth International Conference on Information Visualisation (IV 2006), pp. 609–614. IEEE (2006)
Frigo, M., Johnson, S.G.: The design and implementation of FFTW3. Proc. IEEE 93(2), 216–231 (2005). Special issue on "Program Generation, Optimization, and Platform Adaptation"
Gauss, C.F.: Theoria interpolationis methodo nova tractata, vol. 3, pp. 265–327. Königliche Gesellschaft der Wissenschaften, Göttingen (1866)
gearshifft: Benchmark Suite for Heterogeneous FFT Implementations (2016). https://github.com/mpicbg-scicomp/gearshifft
Huisken, J., Swoger, J., Del Bene, F., Wittbrodt, J., Stelzer, E.H.: Optical sectioning deep inside live embryos by selective plane illumination microscopy. Science 305(5686), 1007–1009 (2004)
Hurd, T.R., Zhou, Z.: A Fourier transform method for spread option pricing. SIAM J. Fin. Math. 1(1), 142–157 (2010)
MKL Intel. Intel math kernel library (2007)
Information technology — Programming languages — C++. Norm (2014)
Katoh, K., Misawa, K., Kuma, K.I., Miyata, T.: MAFFT: a novel method for rapid multiple sequence alignment based on fast Fourier transform. Nucleic Acids Res. 30(14), 3059–3066 (2002)
Maronga, B., Gryschka, M., Heinze, R., Hoffmann, F., Kanani-Sühring, F., Keck, M., Ketelsen, K., Letzel, M.O., Sühring, M., Raasch, S.: The Parallelized Large-Eddy Simulation Model (PALM) version 4.0 for atmospheric and oceanic flows: model formulation, recent developments, and future perspectives. Geosci. Model Dev. Discuss. 8(2), 1539–1637 (2015)
Meuer, H., Strohmaier, E., Dongarra, J., Simon, H.D.: Top. 500 supercomputing sites. Technical report top. 500.org (2011). https://www.top.500.org/lists/2016/11/
NVIDIA. CUFFT library. Version (2010). https://developer.nvidia.com/cufft
Park, Y.S., Park, K.R., Kim, J.M., Jeong, H.Y.: Fast Fourier transform benchmark on X86 Xeon system for multimedia data processing. Multimedia Tools Appl., 1–16 (2015)
Preibisch, S., Amat, F., Stamataki, E., Sarov, M., Singer, R.H., Myers, E., Tomancak, P.: Efficient Bayesian-based multiview deconvolution. Nat. Methods 11(6), 645–648 (2014)
Schmid, B., Huisken, J.: Real-time multi-view deconvolution. Bioinformatics 31(20), 3398–3400 (2015)
Stockham Jr., T.G.: High-speed convolution and correlation. In: Proceedings of the April 26–28, 1966, Spring Joint Computer Conference, pp. 229–233. ACM (1966)
Stroustrup, B.: The Design and Evolution of C++. Pearson Education India, Hoboken (1994)
Van Loan, C.: Computational Frameworks for the Fast Fourier Transform, vol. 10. SIAM, New Delhi (1992)
Williams, S., Waterman, A., Patterson, D.: Roofline: an insightful visual performance model for multicore architectures. Commun. ACM 52(4), 65–76 (2009)
Zentrum für Informationsdienste und Hochleistungsrechnen, TU Dresden. Taurus. https://doc.zih.tu-dresden.de/hpc-wiki/bin/view/Compendium/SystemTaurus
Acknowledgments
The work was funded by Nvidia through the GPU Center of Excellence (GCOE) at the Center for Information Services and High Performance Computing (ZIH), TU Dresden, where the K20Xm and K80 GPU cluster Taurus was used. We would like to thank the Helmholtz-Zentrum Dresden-Rossendorf for providing the infrastructure to host the Nvidia Tesla P100 (provided by Nvidia for the GCOE) in the Hypnos HPC cluster. We would also like to thank the Max Planck Institute of Molecular Cell Biology and Genetics for supporting this publication by providing computing infrastructure and service staff working time.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Steinbach, P., Werner, M. (2017). gearshifft – The FFT Benchmark Suite for Heterogeneous Platforms. In: Kunkel, J.M., Yokota, R., Balaji, P., Keyes, D. (eds) High Performance Computing. ISC High Performance 2017. Lecture Notes in Computer Science(), vol 10266. Springer, Cham. https://doi.org/10.1007/978-3-319-58667-0_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-58667-0_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-58666-3
Online ISBN: 978-3-319-58667-0
eBook Packages: Computer ScienceComputer Science (R0)