
Abstract
This paper studies the nonconvex quadratic minimization problems with quadratic constraints (called it as \(\mathscr {P}_{qq}\)). These problems are from computational science, machine learning, data mining, pattern recognition, computational mechanics, and so on. When the quadratical matrix in the objective function is non-definition, it is very difficult to get the global optimization solutions. There is a very powerful method proposed by David Gao and it is called as canonical duality. It can help to convert \(\mathscr {P}_{qq}\) into a concave maximization dual problem over a convex set. In this work, we employ it to deal with a special class of \(\mathscr {P}_{qq}\). The canonical duality problems are formulated and the equation between optimization solution of \(\mathscr {P}_{qq}\) and canonical duality problem is presented in Theorem 1. Two conditions are given in Theorem 2. Under these conditions, we can prove that the canonical duality problem has a unique nonzero solution in the dual space. An algorithm is proposed to find out the global optimization solutions. Several examples are illustrated to show that the conditions are active and the proposed method is effective.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


1 Introduction
In recent years, nonconvex quadratic minimization problems with quadratic constraints have attracted more and more attentions. The problems are arising from applications in diverse fields such as computational science, machine learning, data mining, pattern recognition, computational mechanics, and so on.
In 2012, Feng, Lin, Sheu, and Xia [7] had studied the (nonconvex) quadratic minimization problem with one quadratic constraint(QP1QC). They showed that under given assumption, the nonconvex (QP1QC) problem could be solved through a dual approach with no duality gap. In 2014, Fabian and Gabriel [6] had considered quadratic minimization problems with finitely many linear equality and a single (nonconvex) quadratic inequality constraints. They characterized the strong duality, necessary and sufficient optimality conditions with or without the Slater assumption geometrically.
In 2013, Tuy and Tuan [28] had studied new strong duality conditions for multiple constrained quadratic optimization based on the topological minimax theorem. Their results showed that many quadratic programs to be solved by solving one or just a few semidefinite programs. In the last work of Tuy and Hoai-Phuong [27], they had proposed novel approach to get more appropriate approximate optimal solutions of the problems. In 2007, Jeyakumar et al. [21] had studied necessary global optimality conditions for special classes of quadratic optimization problems such as weighted least squares with ellipsoidal constraints, quadratic minimization with binary constraints, and so on.
In 2013, Misener and Floudas [23] had introduced the global mixed-integer quadratic optimizer(GloMIQO). The problems can be considered as the special cases of \(\mathscr {P}_{qq}\). They proposed a novel algorithm to solve the problems based on branch-and-bound method. In 2013, Peter et al. [22] had studied the spatial branch-and-bound method [26]. They proposed a novel method to perturb infeasible iterates along Mangasarian–Fromovitz directions to feasible points. Their numerical results showed that their proposed algorithm could perform well even for optimization problems where the standard branch-and-bound method did not converge to the correct optimal value.
In 2012, Yuan, Fang, and Gao [33] had considered a class of quadrinomial minimization problems with one quadratic constraint. In that work, the objective function is fourth order polynomial. Before this work, the canonical duality was employed to solve the altering support vector machine [32] and the corresponding problems with linear inequality constraints had been studied [31].
The nonconvex quadratic minimization problems with quadratic constraints can be formulated as follows (\((\mathscr {P}_{qq})\) in short)
where \({ A} ={ A}^{T}\in {\mathbb R}^{n \times n}\) is an indefinite matrix, the feasible space \(\mathscr {X}_a\) is defined by
in which, \({ Q_{i}}^{T} ={ Q_{i}}\in {\mathbb R}^{n \times n}\;\;(i=1,2,\cdots , m)\) are given nonsingular matrices, \(b_{i}\in {\mathbb R}^n,(i=1,2,\cdots , m)\) are given vectors which control the geometric centers. \(c_{i}(i=1,2,\cdots , m)\in {\mathbb R}\) are given input constants.
In order to make sure that the feasible space \(\mathscr {X}_a \) is nonempty, the quadratic constraints must satisfy the Slater regularity condition, i.e., there exists one point \(x_0\) such that \({\frac{1}{2} x_0^{T} Q_{i} x_0}+b_{i}^{T}x_0\leqslant {c_{i}},i=1,2,\cdots ,m\).
In this work, one hard restriction is given that \(f \ne 0 \in {\mathbb R}^n\). The restriction is very important to guarantee the uniqueness of global optimization solution of \((\mathscr {P}_{qq})\). In physics, \(P(x)=\frac{1}{2}{x}^{T}{A x}-{ f}^{T}{ x}\) means energy function. The first part \(\frac{1}{2}{x}^{T}{A x}\) means kinetic energy or elastic energy or other one. The second part \({ f}^{T}{ x}\) means work under an input force f. If force \(f=0\)(object is on the stable state), the problems may have infinite global optimization solutions. For example, we consider the following problem
This problem has infinite solutions (x, y) in \(\mathbb R^2\) and \({x^2}+y^2=4\). In another word, the boundary points of feasible space are the global optimization solutions. If force \(f=(2,2)^{T}\), the problem is formulated as follows
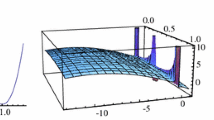
This problem has unique global optimization solution \((x^*,y^*)=(\sqrt{2},\sqrt{2})\) (Fig. 1).

Flowchart to show the difference between \(f=0\) and \(f\ne 0\). The color surface is the figure of the objective function on the feasible space (the disk). The left one is \(f=0\) and it shows that the problem has infinite global optimization solutions on the feasible space’s boundary. The right one is \(f=(2,2)^{T}\) and it shows that the problem has unique global optimization solution on the point \((\sqrt{2},\sqrt{2})\)
It is known that linear mixed 0–1, fractional, polynomial, bilevel, generalized linear complementarity problems, can be reformulated as special cases of \((\mathscr {P}_{qq})\). Such problems have attracted the attention of many researchers in recent years. The problem of minimizing nonconvex quadratic function with one convex quadratic constraint arises from applying the trust region method in solving unconstrained optimization. It was first proposed by Celis, Dennis, and Tapia (see in [2] and developed by Powell and Yuan in 1990 and 1991(see in [25, 30]. The subproblem of trust region method is described as follows

In which, \(\delta \) is the objective vector(after solving the model (3), we can construct the next iteration points with (\(x^{(k+1)}\) \(=x^{(k)}+\delta \))), \(g^{(k)}=\nabla f(x^{(k)})\) is the gradient vector, \(B^{(k)}\) is the Hessian matrix or approximate matrix of Hessian and \(\rho _{k}\) is the trust region parameter. If the objective function is nonconvex, this problem is NP-hard [24].
With two (general) convex quadratic constraints, recently, the problem is termed as the extended trust region subproblem(see in [2, 25, 29, 30]. In general, it is proved to be NP-hard (see in [1, 24]. Actually, the extended trust region subproblem is a special case of our presented problem \((\mathscr {P}_{qq})\). It can be formulated as follows [29]
Motivated by the difficulty of solving these problems, we are looking for some good and powerful method to check out the global optimization solution. There is a very powerful method proposed by Gao David (see in [12, 18]) and it is called as canonical duality. The idea is from Legendre duality(presented and explored by Ekeland (readers can refer to [3,4,5]). It is proved that it has some advantages in global optimization and nonlinear mechanics (see in [8,9,10,11,12,13,14,15,16,17,18,19,20]). In this work, we employ it to deal with a special class of \(\mathscr {P}_{qq}\) and use it to convert \(\mathscr {P}_{qq}\) into a concave maximization dual problem over a convex set .
The paper is organized as follows. In Sect. 2, one novel definition is introduced and stated as complementary positive definite matrix group. The basic procedure is presented to convert \(\mathscr {P}_{qq}\) into a concave maximization dual problem. Two theorems are presented to support us to find out the global optimization solution. Main result in Theorem 1 is the equation between optimization solution of \(\mathscr {P}_{qq}\) and canonical duality problem. Main result in Theorem 2 is to give conditions to make sure that the canonical duality problem has a unique optimization solution. In Sect. 3, we present the basic framework of the proposed algorithm. In Sect. 4, several examples are illustrated to show the correctness of given conditions and effectiveness of presented theorems. Finally, we make a conclusion.
2 Canonical Duality Problem
2.1 Complementary Positive Definite Matrix
In order to study the existence of the problem \(\mathscr {P}_{qq}\), we introduce a definition.
Definition 1 For a given matrix \(A\in \mathbb R^{n\times n}\), \(\mathscr {G}_{+}(A)\subset \mathbb R^{n\times n}\) is called as complementary positive definite matrix group of A, if for any \( B \in \mathscr {G}_{+}(A)\), \(A+B\) is positive definite. Mathematically,
Especially, if \(A+B=I\), B is called identity complementary matrix of A, where I is the identity matrix of order n by n.
With the same idea, a new definition on complementary negative definite matrix group can be given.
2.2 Canonical Duality Problem of \(\mathscr {P}_{qq}\)
Following the standard procedure and ideas proposed by David Gao [15,16,17,18], we construct the geometrical mapping as follows
The indicator is defined by
With the indicator, the quadratic constraints in \((\mathscr {P}_{qq})\) can be relaxed and \((\mathscr {P}_{qq})\) takes the unconstrained form as following
Because \(\mathscr {I}(\varvec{\varepsilon })\) is convex and lower semi-continuous on \(\mathbb R^m\), their canonical dual variable \(\varvec{\sigma }\) satisfies the following duality relation
where \(\partial ^-\) is called the sub-differential of \(\mathscr {I}\) in convex analysis. \(\mathscr {I}^{*}(\varvec{\sigma })\) is Fenchel sup-conjugate of \(\mathscr {I}\) by
The canonical dual function of P(x) is defined by the following equation (referred to [8])
where
in which the notation \(sta \{*: x\in \mathbb R^n \}\) is the operator to find out the stationary point in the space \( \mathbb R^n\), \(G(\varvec{\sigma })\), \(F(\varvec{\sigma })\) and c are defined by
where \({\sigma }_{i}\) is the i-th element of \(\varvec{\sigma }\).
The dual feasible space is defined by
The canonical dual problem (\(\mathscr {P}^{d}\) in short) associated with \((\mathscr {P}_{qq})\) can be eventually formulated as follows
2.3 Two Important Theorems
In order to show that there is no duality gap, the following theorem is presented.
Theorem 1
If \(A, Q_{i}, b_{i}, f_{i}, c_{i},\) \(i=1,2,\cdots ,m,\) are given with definitions in \((\mathscr {P}_{qq})\) such that the dual feasible space
is not empty, the problem
is canonically (perfectly) dual to \((\mathscr {P}_{qq})\). In another words, if \(\bar{\varvec{\sigma }}\) is a solution of the dual problem \((\mathscr {P}^d)\),
is a solution of \((\mathscr {P}_{qq})\) and
Proof.
If \(\bar{\varvec{\sigma }}\) is a solution of the dual problem \((\mathscr {P}^d)\) such that (17) holds, it must satisfy the KKT conditions . Then, according to the complementarity conditions, we have
Let us pay attention to the (13) and \(\bar{x}\) must satisfy the constraints, we have
This result shows that \(\bar{x} =G(\bar{\varvec{\sigma }})^{-1}F(\bar{\varvec{\sigma }})\) is a KKT point of \((\mathscr {P}_{qq})\).
Next, we show the equivalence between the primal problem and canonical duality one. According to complementarity conditions (20), we have
Thus, in terms of \(\bar{x} =G(\bar{\varvec{\sigma }})^{-1}F(\bar{\varvec{\sigma }})=({ A}+\sum \limits _{i=1}^{m}Q_{i}\bar{{\sigma }}_{i})^{-1}(f-\sum \limits _{i=1}^{m}b_{i} \bar{{\sigma }}_{i})\), we have
then
which shows that there is no duality gap between \((\mathscr {P}_{qq})\) and \((\mathscr {P}^{d})\). The proof of the theorem is concluded.
In order to get the optimization solution of \((\mathscr {P}_{qq})\), we introduce the following subset
In order to hold on the uniqueness of optimal duality solution, the following existence theorem is presented.
Theorem 2
For any given symmetrical matrixes \( A, Q_i,\in \mathbb R^{n \times n}, \) \(\mathscr {G}_+(A)\) (defined by (5)) is the complementary positive definite matrix group of A, \(f, b_i \in \mathbb R^n, c_{i}\in \mathbb R\), \(i=1,2,\cdots ,m,\) if the following two conditions are satisfied
- \(C_{1}:\) :
-
\(\sum \limits _{i=1}^{m}Q_i \in \mathscr {G}_+(A)\) ;
- \(C_{2}:\) :
-
there must exist one \( k (1\le k \le m)\) such that \(Q_k\) is positive definite and \(Q_k\in \mathscr {G}_+(A)\), moreover,
$$\begin{aligned} \Vert D_kA^{-1}f\Vert >\Vert b_k^TD_k^{-1}\Vert +\sqrt{\Vert b_k^TD_k^{-1}\Vert ^2+2|c_k|}, \end{aligned}$$(24)where \(Q_k=D_k^TD_k\) and \(\Vert *\Vert \) is some vector norm .
Then, the canonical duality problem (16) has a unique nonzero solution \(\bar{\varvec{\sigma }}\) in the space \(\mathscr {S}_{+}\).
Proof.
If the condition \(C_{1}\) is satisfied, the dual feasible space defined by (23) is nonempty.
If \(C_{2}\) is also satisfied, we can get two results, the first one is that there is one positive definite matrix \(D_{k}\) such that
The second one is that the stationary point of quadratic objective function is out of the convex constraint defined by \(\frac{1}{2}x^TQ_kx+b_{k}^Tx\le c_{k}\). The first one is easy to be proved because \(Q_k\) is symmetrical positive definite. Next, we will show how to get the the second result. Because \(D_{k}\) from the first result is also positive definite, we have
if we pay attention to (24), from the above inequalities, the following inequalities are easy to obtain,
So, \(A^{-1}f\) is out of the constraint. According to complementary theory,
Then, there is nonzero solution for the canonical duality problem in the space \(\mathscr {S}_{+}\). Because the objective function is concave and differentiable in the space \(\mathscr {S}_{+}\), the canonical duality solution is unique. The proof of theorem is concluded.
3 Algorithm
In this section, an algorithm is proposed to solve the problem \((\mathscr {P}_{qq})\). The basic procedures are listed in Algorithm 1.

The algorithm has two important parts. The first one is to judge the conditions. The other one is to get the duality optimization solution.
In the first part, we need to complete two important steps, they are from the computation of eigenvalues of \(A+\sum _{k=1}^m Q_k\) and \(A+Q_i\). If we recall the parameters, n is the dimensional number of input variable x and m is the number of constrains. The complexity of the first part is
In the other part, the time complexity comes from the method to solve the canonical duality problem. The complexity is
The complexity of the final time complexity of our proposed algorithm is
4 Applications
In this section, several examples are illustrated to show how to use the presented theory to solve the problems. We employ the Quasi-Newton method to solve the canonical duality problems.
Example 1. First of all, let us consider two-dimensional quadratic minimization problem with one quadratic constraint. If we take \(A=\left( \begin{array}{cc}{2}&{} {0}\\ {0}&{} {-1} \end{array}\right) ,\) \(Q=\left( \begin{array}{cc}{4}&{} {0}\\ {0}&{} {2} \end{array}\right) ,f=\left( \begin{array}{c}{3}\\ {3}\end{array}\right) ,\) \(b=\left( \begin{array}{c}{0}\\ {-2}\end{array}\right) ,c=3\), the following minimization problem is obtained,
such that
This problem is to search the global minimize value of P(x) in the inner part of elliptic sphere whose boundary is determined by \({2x_{1}^2}+(x_{2}-1)^2=4\)(can be seen in Fig. 2).

The graph of p(x) on the quadratic constraint
We can easily verify that condition \(C_1\) in Theorem 2 is satisfied because the eigenvalues of matrix \(A+Q\) are 6 and 1. \(C_{2}\) is also satisfied because \(\Vert DA^{-1}f\Vert =5.1962\) and
where \(Q=D^TD\).
The corresponding dual problem is
such that \({\sigma }\geqslant 0.\)
Then we can present the solution of this problem. This dual problem has a unique solution:
The canonical duality global maximize value is
The graph of the canonical duality problem \(P^{d}({\sigma })\) on the interval \([-5,5]\) is shown in Fig. 3. In this figure, we easily see that \(\bar{{\sigma }}=1.5358\) is the global maximizer and \(\max P^{d}({\sigma })=P^{d}(1.5)=-14.0576.\)

The graph of \(P^{d}({\sigma })\) on the interval \([-5,5]\)
The optimal solution of primal problem can be obtained by
It is very easy to verify that
Let us pay attention to the solution, \(\bar{{\sigma }}=1.5358\) shows that the solution \(\bar{x}\) is on the boundary of the feasible space, in fact, we can understand this from Fig. 2. We can easily check that \(\bar{x}= \left( \begin{array}{c}0.3684 \\ 2.9309\end{array}\right) \) satisfies \({2x_{1}^2}+(x_{2}-1)^2=4\).
Example 2. We now consider three-dimensional quadratic minimization problem with two quadratic constraints. If we take \(A=\left( \begin{array}{ccc}{-2}&{} {0}&{} {0}\\ {0}&{} {2}&{} {0}\\ {0}&{} {0}&{} {-2} \end{array}\right) ,\) \(Q_{1}=\left( \begin{array}{ccc}{4}&{} {0}&{} {0}\\ {0}&{} {4}&{} {0}\\ {0}&{} {0}&{} {4} \end{array}\right) ,\) \(Q_{2}=\left( \begin{array}{ccc}{4}&{} {0}&{} {0}\\ {0}&{} {-1}&{} {0}\\ {0}&{} {0}&{} {4} \end{array}\right) ,\) \(f=\left( \begin{array}{c}{4}\\ {2}\\ {4}\end{array}\right) ,\) \(b_{1}=\left( \begin{array}{c}{0}\\ {0}\\ {0}\end{array}\right) ,b_{2}=\left( \begin{array}{c}{-3}\\ {0}\\ {0}\end{array}\right) ,c_{1}=2,c_{2}=2\), the following minimization problem is obtained,
such that
and
This problem is to look for the global minimize value of P(x) in the communal inner part of one parabolic and one sphere which boundary is determined by \(2{x_{1}^2}+2x_{2}^2+2x_{3}^2= 2\) and \(2{x_{1}^2}-0.5x_{2}^2+2x_{3}^2-3x_{1}=2\) (can be seen in Fig. 4).

Two quadratic constrains figure bounded by \({2x_{1}^2}+2x_{2}^2+2x_{3}^2 \leqslant 2\) and \(2x_{1}^2-0.5x_{2}^2+2x_{3}^2-3x_{1} \leqslant 2\)
Also, we can easily verify that condition \(C_{1}\) in Theorem 2 is satisfied because the eigenvalues of \(A+Q_{1}+Q_{2}\) are 5, 6 and 6, the eigenvalues of \(A+Q_{1}\) are 2, 2 and 6. \(C_{2}\) is satisfied because \(\Vert D_1A^{-1}f\Vert =6\) and
where \(Q_1=D_1^TD_1\).
According to canonical duality theory, the canonical dual problem of (31) is as follows:
such that \({\sigma }_{1}\geqslant 0, {\sigma }_{2}\geqslant 0.\)
Then we can get the solution of this problem as following:
The canonical duality global maximized value is
The graph of canonical duality problem objective function \(P^{d}(\bar{{\sigma }}_{1},0)\) on the interval [1.8, 2.2] is shown in Fig. 5. In its figure, we easily guarantee that \((\bar{{\sigma }}_{1}=1.9447,\bar{{\sigma }}_{2}=0)\) is the global maximize point and \(\max P^{d}({\sigma }_{1},0)=P^{d}(1.9447,0)=-6.8627.\)

The graph of \(P^{d}({\sigma }_{1},0)\) on the interval [1.8, 2.2]
The optimal solution of primal problem can be obtained by
It is very easy to verify that
Example 3. We now consider four-dimensional quadratic minimization problem with three quadratic inequalities. constraint. If we take
\(b_{3}=\left( \begin{array}{cccc}{0}&{0}&{-1}&{0}\end{array}\right) ^T, c_{1}=9,c_{2}=c_{3}=8.5\), the following minimization problem is obtained,
such that
and
and
The equality of the first constraint is sphere, the second one is ellipsoid and the last one is hyperboloid.
Also, we can easily verify that condition \(C_{1}\) in Theorem 2 is satisfied because the eigenvalues of \(A+Q_{1}+Q_{2}+Q_{3}\) are 4, 7, 7 and 10, the eigenvalues of \(A+Q_{1}\) are 4, 4, 4 and 6. \(C_{2}\) is satisfied because \(\Vert D_1A^{-1}f\Vert =8.9855\) and
where \(Q_1=D_1^TD_1\).
According to canonical duality theory, the canonical dual problem of (35) is as follows
such that \({\sigma }_{i}\geqslant 0,i=1,2,3.\)
Then we can get the solution of this problem as following:
The canonical duality global maximized value is
The optimal solution of primal problem can be obtained by
It is very easy to verify that
Example 4. Here, we present a ten-dimensional nonconvex quadratic programming with two quadratic constraints. If we let
the other corresponding coefficients are listed as follows
and \(c_{1}=c_{2}=20\).
Similar with the other three examples, we can easily verify that condition \(C_{1}\) in Theorem 2 is satisfied because the eigenvalues of \(A+Q_{1}+Q_{2}\) are listed as follows \(\{6.3635,\) 8.7851, 10.4295, 11.0365, 14.1675, 16.3225, 17.7796, 22.3263, 26.8958, \( 36.8937\}\), the eigenvalues of \(A+Q_{1}\) are listed as follows \(\{2.8501,\) 4.6238, 5.8963, 6.9364, 8.6136, 9.8704, 10.7933, 11.8424, 15.0207, \( 22.5531\}\). \(C_{2}\) is satisfied because \(\Vert D_1A^{-1}f\Vert =615.4753\) and
where \(Q_1=D_1^TD_1\).
The canonical duality solution is
The canonical duality global maximize value is
The optimal solution of primal problem can be obtained by
It is very easy to verify that
5 Conclusions
Nonconvex quadratic minimization problems with quadratic constraints are well known because they are very difficult to find out the global optimization solutions. In this paper, we have employed the canonical duality to convert them into a concave maximization dual problem over a convex set. With the presented conditions in Theorem 2, we have proved that the canonical duality problem (16) has a unique nonzero solution \(\bar{\varvec{\sigma }}\) in the space \(\mathscr {S}_{+}\). With Theorem 1, we can find out the global optimization solutions \(\bar{x}\) of the class of nonconvex quadratic minimization problems with quadratic constraints by (17). Several numerical examples can show that the given conditions and results in Theorems 1 and 2 are correct.
References
Anstreicher, K., Wolkowicz, H.: On Lagrangian relaxation of quadratic matrix constraints. SIAM J. Matrix Anal. Appl. 22(1), 41–55 (2000)
Celis, M.R., Dennis, J.E., Tapia, R.A.: A trust region strategy for nonlinear equality constrained optimization. In: Boggs, P.T., Byrd, R.H., Schnabel, R.B. (eds.) Numerical Optimization 1994 (Proceedings of the SIAM Conference on Numerical Optimization. Boulder, CO), SIAM, Philadelphia, pp. 71–82 (1985)
Ekeland, I., Temam, R.: Convex Analysis and Variational Problems. North-Holland, (1976)
Ekeland, I.: Convexity Methods in Hamiltonian Mechanics, pp. 1–247. Springer, Berlin (1990)
Ekeland, I.: Legendre duality in nonconvex optimization and calculus of variations. SIAM J. Control Optim. 15(4), 905–934 (1977)
Fabian, F.B., Gabriel, C.: A geometric characterization of strong duality in nonconvex quadratic programming with linear and nonconvex quadratic constraints. Math. Program. 145(1–2), 263–290 (2014)
Feng, J.M., Lin, G.X., Sheu, R.L., Yong, X.: Duality and solutions for quadratic programming over single non-homogeneous quadratic constraint. J. Glob. Optim. 54(2), 275–293 (2012)
Gao, D.Y.: Canonical dual transformation method and generalized triality theory in nonsmooth global optimization. J. Glob. Optim. 17(1/4), 127–160 (2000)
Gao, D.Y.: Duality Principles in Nonconvex Systems: Theory, Methods and Applications, pp. xviii+454. Kluwer Academic Publishers, Dordrecht (2000)
Gao, D.Y.: Duality-Mathematics. Wiley Encycl. Electr. Electr. Eng. 6(1), 68–77 (1999)
Gao, D.Y: Duality, triality and complementary extremum principles in nonconvex parametric variational problems with applications. IMA J. Appl. Math. 61(1), 199–235 (1998)
Gao, D.Y.: Dual extremum principles in finite deformation theory with applications to post-buckling analysis of extended nonlinear beam theory. Appl. Mech. Rev. 50(11), 64–71 (1997)
Gao, D.Y.: General analytic solutions and complementary variational principles for large deformation nonsmooth mechanics. Meccanica 34(1), 169–198 (1999)
Gao, D.Y.: Analytic solution and triality theory for nonconvex and nonsmooth variational problems with applications. Nonlinear Anal. 42(7), 1161–1193 (2000)
Gao, D.Y.: Perfect duality theory and complete set of solutions to a class of global optimization. Optimization 52(4–5), 467–493 (2003)
Gao, D.Y.: Complete solutions to constrained quadratic optimization problems. J. Glob. Optim. 29(2), 377–399 (2004)
Gao, D.Y.: Sufficient conditions and canonical duality in nonconvex minimization with inequality constraints. J. Ind. Manag. Optim. 1(1), 53–63 (2005)
Gao, D.Y.: Complete solutions and extremality criteria to polynomial optimization problems. J. Glob. Optim. 35(1), 131–143 (2006)
Gao, D.Y., Strang, G.: Geometric nonlinearity: potential energy, complementary energy, and the gap function. Quart. Appl. Math. 47(3), 487–504 (1989)
Gao, D.Y., Strang, G.: Dual extremum principles in finite deformation elastoplastic analysis. Acta Appl. Math. 17(1), 257–267 (1989)
Jeyakumar, V., Rubinov, A.M., Wu, Z.Y.: Non-convex quadratic minimization problems with quadratic constraints: global optimality conditions. Math. Program. Ser. A 110(3), 521–541 (2007)
Kirst, P., Stein, O., Steuermann, P.: An Enhanced Spatial Branch-and-Bound Method in Global Optimization with Nonconvex Constraints. IOR-Preprint, Karlsruhe Institute of Technology (KIT). 2/2013, March 2013
Misener, R., Floudas, C.A.: GloMIQO: global mixed-integer quadratic optimizer. J. Glob. Optim. 57(1), 3–50 (2013)
Pardalos, P.M., Schnitger, G.: Checking local optimality in constrained quadratic programming is NP-hard. Oper. Res. Lett. 7(1), 33–35 (1988)
Powell, M.J.D., Yuan, Y.: A trust region algorithm for equality constrained optimization. Math. Program. 49(1), 189–211 (1990)
Smith, E.M.B., Pantelides, C.C.: A symbolic reformulation/spatial branch-and-bound algorithm for the global optimisation of nonconvex MINLPs. Comput. Chem. Eng. 23(4–5), 457–478 (1999)
Tuy, H., Hoaiphuong, N.T.: A robust algorithm for quadratic optimization under quadratic constraints. J. Glob. Optim. 37(4), 557–569 (2007)
Tuy, H., Tuan, H.D.: Generalized S-Lemma and strong duality in nonconvex quadratic programming. J. Glob. Optim. 56(3), 1045–1072 (2013)
Ye, Y., Zhang, S.: New results on quadratic minimization. SIAM J. Optim. 14(1), 245–267 (2003)
Yuan, Y.: On a subproblem of trust region algorithms for constrained optimization. Math. Program. 47(1), 53–63 (1990)
Yuan, Y.B.: Optimal solutions to a class of nonconvex minimization problems with linear inequalities constraints. Appl. Math. Comput. 203(1), 142–152 (2008)
Yuan, Y.B.: Canonical duality solution for alternating support vector machine. J. Ind. Manag. Optim. 8(3), 611–621 (2012)
Yuan, Y.B., Fang, S.C., Gao, D.Y.: Perfect Duality Theory and Optimal Solutions to Non- convex Quadratic Minimization Problems with Quadratic Constraints. J. Glob. Optim. 52(1), 195–209 (2012)
Acknowledgements
The author would like to offer sincere thanks to reviewers. Their comments and suggestions are very important to improve the presentation and technical sounds. The author would like to offer his sincere thanks to Professor David Yang Gao at the Federation University Australia. Six years ago, he taught me some good ideas to deal with some difficult mathematical problems. Especially, he told me that the canonical duality theory is a very powerful principle to discover the secrets between mathematics and mechanics. This research has been supported by the National Natural Science Foundation under Grant(No. 61001200).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Yuan, Y.B. (2017). Global Optimization Solutions to a Class of Nonconvex Quadratic Minimization Problems with Quadratic Constraints. In: Gao, D., Latorre, V., Ruan, N. (eds) Canonical Duality Theory. Advances in Mechanics and Mathematics, vol 37. Springer, Cham. https://doi.org/10.1007/978-3-319-58017-3_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-58017-3_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-58016-6
Online ISBN: 978-3-319-58017-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)