
Abstract
Sliding mode control is an important method used to solve various problems in control systems engineering. In robust control systems, the sliding mode control is often adopted due to its inherent advantages of easy realization, fast response and good transient performance as well as insensitivity to parameter uncertainties and disturbance. In this work, we derive a novel second order sliding mode control method for the global stabilization of any nonlinear system. The global stabilization result is derived using novel second order sliding mode control method and established using Lyapunov stability theory. Chaos in nonlinear dynamics occurs widely in physics, chemistry, biology, ecology, secure communications, cryptosystems and many scientific branches. Synchronization of chaotic systems is an important research problem in chaos theory. As an application of the general result, the problem of global chaos control of a novel highly chaotic system is studied and a new sliding mode controller is derived. The Lyapunov exponents of the novel chaotic system are obtained as \(L_1 = 12.8393\), \(L_2 = 0\) and \(L_3 = -33.1207\). The large value of the maximal Lyapunov exponent (MLE) shows that the novel chaotic system is highly chaotic. The Kaplan-Yorke dimension of the novel chaotic system is obtained as \(D_{KY} = 2.3877\). We show that the novel highly chaotic system has three unstable equilibrium points. Numerical simulations using MATLAB have been shown to depict the phase portraits of the novel highly chaotic system and the global chaos control of the state trajectories of the novel highly chaotic system.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Chaos theory describes the quantitative study of unstable aperiodic dynamic behavior in deterministic nonlinear dynamical systems. For the motion of a dynamical system to be chaotic, the system variables should contain some nonlinear terms and the system must satisfy three properties: boundedness, infinite recurrence and sensitive dependence on initial conditions [4,5,6, 125,126,127].
Chaos theory has applications in several fields such as memristors [28, 30, 31, 34,35,36, 137, 140, 142], fuzzy logic [7, 49, 111, 146], communication systems [13, 14, 143], cryptosystems [10, 12], electromechanical systems [15, 58], lasers [8, 21, 145], encryption [22, 23, 147], electrical circuits [1, 2, 16, 120, 138], chemical reactions [75, 76, 78, 79, 81, 83, 85,86,87, 90, 92, 96, 112], oscillators [93, 94, 97, 98, 139], tokamak systems [91, 99], neurology [80, 88, 89, 95, 105, 141], ecology [77, 82, 106, 108], etc.
The problem of global control of a chaotic system is to device feedback control laws so that the closed-loop system is globally asymptotically stable. The problem of global chaos synchronization of chaotic systems is to find feedback control laws so that the master and slave systems are globally and asymptotically synchronized with respect to their states. There are many techniques available in the control literature for the regulation and synchronization of chaotic systems such as active control [17, 44, 45, 54, 118, 129], adaptive control [46,47,48, 51, 53, 64, 104, 115, 119, 120], backstepping control [37,38,39,40,41, 57, 122, 130, 135, 136], sliding mode control [19, 26, 56, 63, 65, 66, 73, 103, 107, 123], etc.
Some classical paradigms of 3-D chaotic systems in the literature are Lorenz system [24], Rössler system [42], ACT system [3], Sprott systems [50], Chen system [11], Lü system [25], Cai system [9], Tigan system [60], etc.
Many new chaotic systems have been discovered in the recent years such as Zhou system [148], Zhu system [149], Li system [20], Sundarapandian systems [52, 55], Vaidyanathan systems [67,68,69,70,71,72, 74, 84, 100, 102, 109, 110, 113, 114, 116, 117, 121, 124, 128, 131,132,133,134], Pehlivan system [27], Sampath system [43], Tacha system [59], Pham systems [29, 32, 33, 35], Akgul system [2], etc.
In this research work, we derive a general result for the global stabilization of nonlinear systems using second order sliding mode control (SMC) [61, 62]. The sliding mode control approach is recognized as an efficient tool for designing robust controllers for linear or nonlinear control systems operating under uncertainty conditions.
A major advantage of sliding mode control is low sensitivity to parameter variations in the plant and disturbances affecting the plant, which eliminates the necessity of exact modeling of the plant. In the sliding mode control, the control dynamics will have two sequential modes, viz. the reaching mode and the sliding mode. Basically, a sliding mode controller design consists of two parts: hyperplane design and controller design. A hyperplane is first designed via the pole-placement approach and a controller is then designed based on the sliding condition. The stability of the overall system is guaranteed by the sliding condition and by a stable hyperplane.
This work is organized as follows. In Sect. 2, we discuss the problem statement for the global stabilization of nonlinear systems. Then we derive a general result for the global stabilization of nonlinear systems using novel second order sliding mode control. In Sect. 3, we describe the novel highly chaotic system and its phase portraits. In Sect. 4, we describe the qualitative properties of the novel highly chaotic system. The Lyapunov exponents of the novel chaotic system are obtained as \(L_1 = 12.8393\), \(L_2 = 0\) and \(L_3 = -33.1207\). The Kaplan-Yorke dimension of the novel chaotic system is obtained as \(D_{KY} = 2.3877\). We show that the novel highly chaotic system has three unstable equilibrium points. In Sect. 5, we describe the second order sliding mode controller design for the global chaos control of the novel highly chaotic system and its numerical simulations. Section 6 contains the conclusions of this work.
2 Second Order Sliding Mode Control for Nonlinear Systems
We consider a general nonlinear system given by
where \(\mathbf {x} \in {\mathbf R}^n\) denotes the state of the system, \(A \in {\mathbf R}^{n \times n}\) denotes the matrix of system parameters and \(f(\mathbf {x}) \in {\mathbf R}^n\) contains the nonlinear parts of the system. Also, \(\mathbf {u}\) represents the sliding mode controller to be designed.
Then the global stabilization problem for the system (1) can be stated as follows: Find a controller \(\mathbf {u}(\mathbf {x})\) so as to render the state \(\mathbf {x}(t)\) to be globally asymptotically stable for all values of \(\mathbf {x}(0) \in {\mathbf R}^n\), i.e.
We start the controller design by setting
In Eq. (3), \(B \in {\mathbf R}^n\) is chosen such that (A, B) is completely controllable.
By substituting (3) into (1), we get the closed-loop system dynamics
Next, we start the sliding controller design by defining the sliding variable as
where \(C \in {\mathbf R}^{1 \times n}\) is a constant vector to be determined.
The sliding manifold S is defined as the hyperplane
We shall assume that a sliding motion occurs on the hyperplane S.
In the second order sliding mode control, the following equations must be satisfied:
We assume that
The sliding motion is influenced by equivalent control derived from (7b) as
By substituting (9) into (4), we obtain the equivalent error dynamics in the sliding phase as follows:
where
We note that E is independent of the control and has at most \((n - 1)\) non-zero eigenvalues, depending on the chosen switching surface, while the associated eigenvectors belong to \(\text{ ker }(C)\).
Since (A, B) is controllable, we can use sliding control theory [61, 62] to choose B and C so that E has any desired \((n - 1)\) stable eigenvalues.
This shows that the dynamics (10) is globally asymptotically stable.
Finally, for the sliding controller design, we apply a novel sliding control law, viz.
In (12), \(\mathop {\mathrm {sgn}}(\cdot )\) denotes the sign function and the SMC constants \(k> 0, q > 0\) are found in such a way that the sliding condition is satisfied and that the sliding motion will occur.
By combining Eqs. (7b), (9) and (12), we finally obtain the sliding mode controller v(t) as
Next, we establish the main result of this section.
Theorem 1
The second order sliding mode controller defined by (3) achieves global stabilization for all the states of the system (1) where v is defined by the novel sliding mode control law (13), \(B \in {\mathbf R}^{n \times 1}\) is such that (A, B) is controllable, \(C \in {\mathbf R}^{1 \times n}\) is such that \(C B \ne 0\) and the matrix E defined by (11) has \((n - 1)\) stable eigenvalues.
Proof
Upon substitution of the control laws (3) and (13) into the state dynamics (1), we obtain the closed-loop system dynamics as
We shall show that the error dynamics (14) is globally asymptotically stable by considering the quadratic Lyapunov function
The sliding mode motion is characterized by the equations
By the choice of E, the dynamics in the sliding mode given by Eq. (10) is globally asymptotically stable.
When \(s(\mathbf {x}) \ne 0\), \(V(\mathbf {x}) > 0\).
Also, when \(s(\mathbf {x}) \ne 0\), differentiating V along the error dynamics (14) or the equivalent dynamics (12), we get
Hence, by Lyapunov stability theory [18], the error dynamics (14) is globally asymptotically stable for all \(\mathbf {x}(0) \in {\mathbf R}^n\).
This completes the proof. \(\blacksquare \)
3 A Novel Highly Chaotic System
In this work, we propose a novel highly chaotic system described by
where \(x_1, x_2, x_3\) are the states and a, b, c, d, p are constant, positive, parameters.
In this chapter, we show that the system (18) is chaotic when the parameters take the values
For numerical simulations, we take the initial state of the system (18) as
The Lyapunov exponents of the system (18) for the parameter values (19) and the initial state (20) are determined by Wolf’s algorithm [144] as
Since \(L_1 > 0\), we conclude that the system (18) is chaotic.
Since \(L_1 + L_2 + L_3 < 0\), we deduce that the system (18) is dissipative.
Hence, the limit sets of the system (18) are ultimately confined into a specific limit set of zero volume, and the asymptotic motion of the novel highly chaotic system (18) settles onto a strange attractor of the system.
From (21), we see that the maximal Lyapunov exponent (MLE) of the chaotic system (18) is \(L_1 = 12.8393\), which is very large.
Thus, we conclude that the proposed novel system (18) is highly chaotic.
Also, the Kaplan-Yorke dimension of the novel highly chaotic system (18) is calculated as
which shows the high complexity of the system (18).
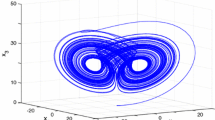
Figure 1 shows the 3-D phase portrait of the highly chaotic system (18) in \({\mathbf R}^3\).
Figures 2, 3 and 4 show the 2-D projections of the highly chaotic system (18) in \((x_1, x_2)\), \((x_2, x_3)\) and \((x_1, x_3)\) planes, respectively.

3-D phase portrait of the novel highly chaotic system in \({\mathbf R}^3\)

2-D phase portrait of the novel highly chaotic system in \((x_1, x_2)\) plane

2-D phase portrait of the novel highly chaotic system in \((x_2, x_3)\) plane

2-D phase portrait of the novel highly chaotic system in \((x_1, x_3)\) plane
4 Qualitative Properties of the Novel Highly Chaotic System
4.1 Dissipativity
In vector notation, the novel highly chaotic system (18) can be expressed as
where
We take the parameter values as in the chaotic case (19).
Let \(\varOmega \) be any region in \({\mathbf R}^3\) with a smooth boundary and also, \(\varOmega (t) = \varPhi _t(\varOmega ),\) where \(\varPhi _t\) is the flow of f. Furthermore, let V(t) denote the volume of \(\varOmega (t)\).
By Liouville’s theorem, we know that
The divergence of the novel chaotic system (23) is calculated as
where \(\mu = a + c + 1 = 21 > 0\).
Inserting the value of \(\nabla \cdot f\) from (26) into (25), we get
Integrating the first order linear differential equation (27), we get
Since \(\mu > 0\), it follows from Eq. (28) that \(V(t) \rightarrow 0\) exponentially as \(t \rightarrow \infty \).
This shows that the novel chaotic system (18) is dissipative. Hence, the limit sets of the system (18) are ultimately confined into a specific limit set of zero volume, and the asymptotic motion of the novel chaotic system (18) settles onto a strange attractor of the system.
4.2 Equilibrium Points
The equilibrium points of the novel highly chaotic system (18) are obtained by solving the equations
We take the parameter values as in the chaotic case (19).
Solving the system (29), we find that the system (18) has three equilibrium points given by
To test the stability type of the equilibrium points, we calculate the Jacobian of the system (18) at any \(\mathbf {x} \in {\mathbf R}^3\) as
The matrix \(J_0 = J(E_0)\) has the eigenvalues
This shows that the equilibrium point \(E_0\) is a saddle point, which is unstable.
The matrix \(J_1 = J(E_1)\) has the eigenvalues
This shows that the equilibrium point \(E_1\) is a saddle-focus, which is unstable.
The matrix \(J_2 = J(E_2)\) has the same eigenvalues as \(J_1 = J(E_1)\). Hence, we conclude that the equilibrium point \(E_2\) is also a saddle-focus, which is unstable.
Thus, all three equilibrium points of the novel highly chaotic system (18) are unstable.
4.3 Rotation Symmetry About the \(x_3\)-Axis
It is easy to see that the system (18) is invariant under the change of coordinates
Thus, the 3-D novel chaotic system (18) has rotation symmetry about the \(x_3\)-axis. Hence, it follows that any non-trivial trajectory of the system (18) must have a twin trajectory
4.4 Invariance
It is easy to see that the \(x_3\)-axis is invariant under the flow of the 3-D novel highly chaotic system (18). The invariant motion along the \(x_3\)-axis is characterized by
which is globally exponentially stable.
4.5 Lyapunov Exponents and Kaplan-Yorke Dimension
We take the parameters of the system (18) as
Also, we take the initial state of the system (18) as
The Lyapunov exponents of the system (18) for the parameter values (36) and the initial state (37) are determined by Wolf’s algorithm [144] as
Figure 5 describes the MATLAB plot for the Lyapunov exponents of the novel chaotic system (18).

Lyapunov exponents of the novel highly chaotic system
From (21), we see that the maximal Lyapunov exponent (MLE) of the chaotic system (18) is \(L_1 = 12.8393\), which is very large. Thus, novel system (18) is highly chaotic. Also, the Kaplan-Yorke dimension of the novel highly chaotic system (18) is calculated as
which shows the high complexity of the system (18).
5 Sliding Mode Controller Design for the Global Chaos Control of the Novel Highly Chaotic System
In this section, we describe the sliding mode controller design for the global chaos control of the novel highly chaotic system by applying the novel sliding mode control method described by Theorem 1 in Sect. 2.
Thus, we consider the controlled novel highly chaotic system given by
where \(x_1, x_2, x_3\) are the states and u is the sliding mode control to be designed.
We take the parameter values as in the chaotic case (19), i.e.
In matrix form, we can write the system dynamics (40) as
The matrices in (42) are given by
We follow the procedure given in Sect. 2 for the construction of the novel sliding controller to achieve global chaos stabilization of the chaotic system (42).
First, we set \(\mathbf {u}\) as
where B is selected such that (A, B) is completely controllable.
A simple choice of B is
It can be easily checked that (A, B) is completely controllable.
Next, we find a sliding variable \(s = C \mathbf {x}\) such that the matrix \(E = [ I - B (C B)^{-1} C ] A\) has two stable eigenvalues.
A simple calculation gives
We also note that the matrix \(E = [ I - B (C B)^{-1} C ] A\) has the eigenvalues
Next, we take the sliding mode gains as
From Eq. (13) in Sect. 2, we obtain the novel sliding control v as
As an application of Theorem 1 to the novel highly chaotic system (40), we obtain the main result of this section as follows.
Theorem 2
The novel highly chaotic system (40) is globally and asymptotically stabilized for all initial conditions \(\mathbf {x}(0) \in {\mathbf R}^3\) with the sliding controller \(\mathbf {u}\) defined by (44), where \(f(\mathbf {x})\) is defined by (43), B is defined by (45) and v is defined by (49). \(\blacksquare \)
For numerical simulations, we use MATLAB for solving the systems of differential equations using the classical fourth-order Runge-Kutta method with step size \(h = 10^{-8}\).
The parameter values of the novel highly chaotic system (40) are taken as in the chaotic case (47).
The sliding mode gains are taken as \(k = 6\) and \(q = 0.2\).
We take the initial state of the chaotic system (40) as
Figure 6 shows the time-history of the controlled states \(x_1, x_2, x_3\).

Time-history of the controlled states \(x_1, x_2, x_3\)
6 Conclusions
In robust control systems, the sliding mode control is commonly used due to its inherent advantages of easy realization, fast response and good transient performance as well as insensitivity to parameter uncertainties and disturbance. In this work, we derived a novel second order sliding mode control method for the global stabilization of nonlinear systems. We proved the main result using Lyapunov stability theory. As an application of the general result, the problem of global chaos control of a novel highly chaotic system was studied and a new second order sliding mode controller has been derived. Numerical simulations using MATLAB were shown to depict the phase portraits of the novel highly chaotic system and the second order sliding mode controller design for the global chaos control of the novel highly chaotic system.
References
Akgul A, Hussain S, Pehlivan I (2016) A new three-dimensional chaotic system, its dynamical analysis and electronic circuit applications. Optik 127(18):7062–7071
Akgul A, Moroz I, Pehlivan I, Vaidyanathan S (2016) A new four-scroll chaotic attractor and its engineering applications. Optik 127(13):5491–5499
Arneodo A, Coullet P, Tresser C (1981) Possible new strange attractors with spiral structure. Commun Math Phys 79(4):573–576
Azar AT, Vaidyanathan S (2015) Chaos modeling and control systems design. Springer, Berlin, Germany
Azar AT, Vaidyanathan S (2016) Advances in chaos theory and intelligent control. Springer, Berlin, Germany
Azar AT, Vaidyanathan S (2017) Fractional order control and synchronization of chaotic systems. Springer, Berlin, Germany
Boulkroune A, Bouzeriba A, Bouden T (2016) Fuzzy generalized projective synchronization of incommensurate fractional-order chaotic systems. Neurocomputing 173:606–614
Burov DA, Evstigneev NM, Magnitskii NA (2017) On the chaotic dynamics in two coupled partial differential equations for evolution of surface plasmon polaritons. Commun Nonlinear Sci Numer Simul 46:26–36
Cai G, Tan Z (2007) Chaos synchronization of a new chaotic system via nonlinear control. J Uncertain Syst 1(3):235–240
Chai X, Chen Y, Broyde L (2017) A novel chaos-based image encryption algorithm using DNA sequence operations. Opt Lasers Eng 88:197–213
Chen G, Ueta T (1999) Yet another chaotic attractor. Int J Bifurcat Chaos 9(7):1465–1466
Chenaghlu MA, Jamali S, Khasmakhi NN (2016) A novel keyed parallel hashing scheme based on a new chaotic system. Chaos Solitons Fractals 87:216–225
Fallahi K, Leung H (2010) A chaos secure communication scheme based on multiplication modulation. Commun Nonlinear Sci Numer Simul 15(2):368–383
Fontes RT, Eisencraft M (2016) A digital bandlimited chaos-based communication system. Commun Nonlinear Sci Numer Simul 37:374–385
Fotsa RT, Woafo P (2016) Chaos in a new bistable rotating electromechanical system. Chaos Solitons Fractals 93:48–57
Kacar S (2016) Analog circuit and microcontroller based RNG application of a new easy realizable 4D chaotic system. Optik 127(20):9551–9561
Karthikeyan R, Sundarapandian V (2014) Hybrid chaos synchronization of four-scroll systems via active control. J Electr Eng 65(2):97–103
Khalil HK (2002) Nonlinear Syst. Prentice Hall, New York, USA
Lakhekar GV, Waghmare LM, Vaidyanathan S (2016) Diving autopilot design for underwater vehicles using an adaptive neuro-fuzzy sliding mode controller. In: Vaidyanathan S, Volos C (eds) Advances and applications in nonlinear control systems. Springer, Berlin, Germany, pp 477–503
Li D (2008) A three-scroll chaotic attractor. Phys Lett A 372(4):387–393
Liu H, Ren B, Zhao Q, Li N (2016) Characterizing the optical chaos in a special type of small networks of semiconductor lasers using permutation entropy. Opt Commun 359:79–84
Liu W, Sun K, Zhu C (2016) A fast image encryption algorithm based on chaotic map. Opt Lasers Eng 84:26–36
Liu X, Mei W, Du H (2016) Simultaneous image compression, fusion and encryption algorithm based on compressive sensing and chaos. Opt Commun 366:22–32
Lorenz EN (1963) Deterministic periodic flow. J Atmos Sci 20(2):130–141
Lü J, Chen G (2002) A new chaotic attractor coined. Int J Bifurcat Chaos 12(3):659–661
Moussaoui S, Boulkroune A, Vaidyanathan S (2016) Fuzzy adaptive sliding-mode control scheme for uncertain underactuated systems. In: Vaidyanathan S, Volos C (eds) Advances and applications in nonlinear control systems. Springer, Berlin, Germany, pp 351–367
Pehlivan I, Moroz IM, Vaidyanathan S (2014) Analysis, synchronization and circuit design of a novel butterfly attractor. J Sound Vib 333(20):5077–5096
Pham VT, Volos C, Jafari S, Wang X, Vaidyanathan S (2014) Hidden hyperchaotic attractor in a novel simple memristive neural network. Optoelectron Adv Mater Rapid Commun 8(11–12):1157–1163
Pham VT, Volos CK, Vaidyanathan S (2015) Multi-scroll chaotic oscillator based on a first-order delay differential equation. In: Azar AT, Vaidyanathan S (eds) Chaos modeling and control systems design. Studies in computational intelligence, vol 581. Springer, Germany, pp 59–72
Pham VT, Volos CK, Vaidyanathan S, Le TP, Vu VY (2015) A memristor-based hyperchaotic system with hidden attractors: dynamics, synchronization and circuital emulating. J Eng Sci Technol Rev 8(2):205–214
Pham VT, Jafari S, Vaidyanathan S, Volos C, Wang X (2016) A novel memristive neural network with hidden attractors and its circuitry implementation. Sci China Technol Sci 59(3):358–363
Pham VT, Jafari S, Volos C, Giakoumis A, Vaidyanathan S, Kapitaniak T (2016) A chaotic system with equilibria located on the rounded square loop and its circuit implementation. IEEE Trans Circuits Syst II: Express Briefs 63(9):878–882
Pham VT, Jafari S, Volos C, Vaidyanathan S, Kapitaniak T (2016) A chaotic system with infinite equilibria located on a piecewise linear curve. Optik 127(20):9111–9117
Pham VT, Vaidyanathan S, Volos CK, Hoang TM, Yem VV (2016) Dynamics, synchronization and SPICE implementation of a memristive system with hidden hyperchaotic attractor. In: Azar AT, Vaidyanathan S (eds) Advances in chaos theory and intelligent control. Springer, Berlin, Germany, pp 35–52
Pham VT, Vaidyanathan S, Volos CK, Jafari S, Kuznetsov NV, Hoang TM (2016) A novel memristive time-delay chaotic system without equilibrium points. Eur Phys J: Spec Top 225(1):127–136
Pham VT, Vaidyanathan S, Volos CK, Jafari S, Wang X (2016) A chaotic hyperjerk system based on memristive device. In: Vaidyanathan S, Volos C (eds) Advances and applications in chaotic systems. Springer, Berlin, Germany, pp 39–58
Rasappan S, Vaidyanathan S (2012) Global chaos synchronization of WINDMI and Coullet chaotic systems by backstepping control. Far East J Math Sci 67(2):265–287
Rasappan S, Vaidyanathan S (2012) Hybrid synchronization of \(n\)-scroll Chua and Lur’e chaotic systems via backstepping control with novel feedback. Arch Control Sci 22(3):343–365
Rasappan S, Vaidyanathan S (2012) Synchronization of hyperchaotic Liu system via backstepping control with recursive feedback. Commun Comput Inf Sci 305:212–221
Rasappan S, Vaidyanathan S (2013) Hybrid synchronization of \(n\)-scroll chaotic Chua circuits using adaptive backstepping control design with recursive feedback. Malay J Math Sci 7(2):219–246
Rasappan S, Vaidyanathan S (2014) Global chaos synchronization of WINDMI and Coullet chaotic systems using adaptive backstepping control design. Kyungpook Math J 54(1):293–320
Rössler OE (1976) An equation for continuous chaos. Phys Lett A 57(5):397–398
Sampath S, Vaidyanathan S, Volos CK, Pham VT (2015) An eight-term novel four-scroll chaotic system with cubic nonlinearity and its circuit simulation. J Eng Sci Technol Rev 8(2):1–6
Sarasu P, Sundarapandian V (2011) Active controller design for generalized projective synchronization of four-scroll chaotic systems. Int J Syst Signal Control Eng Appl 4(2):26–33
Sarasu P, Sundarapandian V (2011) The generalized projective synchronization of hyperchaotic Lorenz and hyperchaotic Qi systems via active control. Int J Soft Comput 6(5):216–223
Sarasu P, Sundarapandian V (2012) Adaptive controller design for the generalized projective synchronization of 4-scroll systems. Int J Syst Signal Control Eng Appl 5(2):21–30
Sarasu P, Sundarapandian V (2012) Generalized projective synchronization of three-scroll chaotic systems via adaptive control. Eur J Sci Res 72(4):504–522
Sarasu P, Sundarapandian V (2012) Generalized projective synchronization of two-scroll systems via adaptive control. Eur J Sci Res 72(4):146–156
Shirkhani N, Khanesar M, Teshnehlab M (2016) Indirect model reference fuzzy control of SISO fractional order nonlinear chaotic systems. Proc Comput Sci 102:309–316
Sprott JC (1994) Some simple chaotic flows. Phys Rev E 50(2):647–650
Sundarapandian V (2013) Adaptive control and synchronization design for the Lu-Xiao chaotic system. Lect Notes Electr Eng 131:319–327
Sundarapandian V (2013) Analysis and anti-synchronization of a novel chaotic system via active and adaptive controllers. J Eng Sci Technol Rev 6(4):45–52
Sundarapandian V, Karthikeyan R (2011) Anti-synchronization of hyperchaotic Lorenz and hyperchaotic Chen systems by adaptive control. Int J Syst Signal Control Eng Appl 4(2):18–25
Sundarapandian V, Karthikeyan R (2012) Hybrid synchronization of hyperchaotic Lorenz and hyperchaotic Chen systems via active control. Int J Syst Signal Control Eng Appl 7(3):254–264
Sundarapandian V, Pehlivan I (2012) Analysis, control, synchronization, and circuit design of a novel chaotic system. Math Comput Modell 55(7–8):1904–1915
Sundarapandian V, Sivaperumal S (2011) Sliding controller design of hybrid synchronization of four-wing Chaotic systems. Int J Soft Comput 6(5):224–231
Suresh R, Sundarapandian V (2013) Global chaos synchronization of a family of n-scroll hyperchaotic Chua circuits using backstepping control with recursive feedback. Far East J Math Sci 73(1):73–95
Szmit Z, Warminski J (2016) Nonlinear dynamics of electro-mechanical system composed of two pendulums and rotating hub. Proc Eng 144:953–958
Tacha OI, Volos CK, Kyprianidis IM, Stouboulos IN, Vaidyanathan S, Pham VT (2016) Analysis, adaptive control and circuit simulation of a novel nonlinear finance system. Appl Math Comput 276:200–217
Tigan G, Opris D (2008) Analysis of a 3D chaotic system. Chaos Solitons Fractals 36:1315–1319
Utkin VI (1977) Variable structure systems with sliding modes. IEEE Trans Autom Control 22(2):212–222
Utkin VI (1993) Sliding mode control design principles and applications to electric drives. IEEE Trans Ind Electron 40(1):23–36
Vaidyanathan S (2011) Analysis and synchronization of the hyperchaotic Yujun systems via sliding mode control. Adv Intell Syst Comput 176:329–337
Vaidyanathan S (2012) Anti-synchronization of Sprott-L and Sprott-M chaotic systems via adaptive control. Int J Control Theory Appl 5(1):41–59
Vaidyanathan S (2012) Global chaos control of hyperchaotic Liu system via sliding control method. Int J Control Theory Appl 5(2):117–123
Vaidyanathan S (2012) Sliding mode control based global chaos control of Liu-Liu-Liu-Su chaotic system. Int J Control Theory Appl 5(1):15–20
Vaidyanathan S (2013) A new six-term 3-D chaotic system with an exponential nonlinearity. Far East J Math Sci 79(1):135–143
Vaidyanathan S (2013) Analysis and adaptive synchronization of two novel chaotic systems with hyperbolic sinusoidal and cosinusoidal nonlinearity and unknown parameters. J Eng Sci Technol Rev 6(4):53–65
Vaidyanathan S (2014) A new eight-term 3-D polynomial chaotic system with three quadratic nonlinearities. Far East J Math Sci 84(2):219–226
Vaidyanathan S (2014) Analysis and adaptive synchronization of eight-term 3-D polynomial chaotic systems with three quadratic nonlinearities. Eur Phys J: Spec Top 223(8):1519–1529
Vaidyanathan S (2014) Analysis, control and synchronisation of a six-term novel chaotic system with three quadratic nonlinearities. Int J Modell Ident Control 22(1):41–53
Vaidyanathan S (2014) Generalised projective synchronisation of novel 3-D chaotic systems with an exponential non-linearity via active and adaptive control. Int J Modell Ident Control 22(3):207–217
Vaidyanathan S (2014) Global chaos synchronisation of identical Li-Wu chaotic systems via sliding mode control. Int J Modell Ident Control 22(2):170–177
Vaidyanathan S (2015) A 3-D novel highly chaotic system with four quadratic nonlinearities, its adaptive control and anti-synchronization with unknown parameters. J Eng Sci Technol Rev 8(2):106–115
Vaidyanathan S (2015) A novel chemical chaotic reactor system and its adaptive control. Int J ChemTech Res 8(7):146–158
Vaidyanathan S (2015) A novel chemical chaotic reactor system and its output regulation via integral sliding mode control. Int J ChemTech Res 8(11):669–683
Vaidyanathan S (2015) Active control design for the anti-synchronization of Lotka-Volterra biological systems with four competitive species. Int J PharmTech Res 8(7):58–70
Vaidyanathan S (2015) Adaptive control design for the anti-synchronization of novel 3-D chemical chaotic reactor systems. Int J ChemTech Res 8(11):654–668
Vaidyanathan S (2015) Adaptive control of a chemical chaotic reactor. Int J PharmTech Res 8(3):377–382
Vaidyanathan S (2015) Adaptive control of the FitzHugh-Nagumo chaotic neuron model. Int J PharmTech Res 8(6):117–127
Vaidyanathan S (2015) Adaptive synchronization of chemical chaotic reactors. Int J ChemTech Res 8(2):612–621
Vaidyanathan S (2015) Adaptive synchronization of generalized Lotka-Volterra three-species biological systems. Int J PharmTech Res 8(5):928–937
Vaidyanathan S (2015) Adaptive synchronization of novel 3-D chemical chaotic reactor systems. Int J ChemTech Res 8(7):159–171
Vaidyanathan S (2015) Analysis, properties and control of an eight-term 3-D chaotic system with an exponential nonlinearity. Int J Modell Ident Control 23(2):164–172
Vaidyanathan S (2015) Anti-synchronization of brusselator chemical reaction systems via adaptive control. Int J ChemTech Res 8(6):759–768
Vaidyanathan S (2015) Anti-synchronization of brusselator chemical reaction systems via integral sliding mode control. Int J ChemTech Res 8(11):700–713
Vaidyanathan S (2015) Anti-synchronization of chemical chaotic reactors via adaptive control method. Int J ChemTech Res 8(8):73–85
Vaidyanathan S (2015) Anti-synchronization of the FitzHugh-Nagumo chaotic neuron models via adaptive control method. Int J PharmTech Res 8(7):71–83
Vaidyanathan S (2015) Chaos in neurons and synchronization of Birkhoff-Shaw strange chaotic attractors via adaptive control. Int J PharmTech Res 8(6):1–11
Vaidyanathan S (2015) Dynamics and control of brusselator chemical reaction. Int J ChemTech Res 8(6):740–749
Vaidyanathan S (2015) Dynamics and control of Tokamak system with symmetric and magnetically confined plasma. Int J ChemTech Res 8(6):795–802
Vaidyanathan S (2015) Global chaos synchronization of chemical chaotic reactors via novel sliding mode control method. Int J ChemTech Res 8(7):209–221
Vaidyanathan S (2015) Global chaos synchronization of Duffing double-well chaotic oscillators via integral sliding mode control. Int J ChemTech Res 8(11):141–151
Vaidyanathan S (2015) Global chaos synchronization of the forced Van der Pol chaotic oscillators via adaptive control method. Int J PharmTech Res 8(6):156–166
Vaidyanathan S (2015) Hybrid chaos synchronization of the FitzHugh-Nagumo chaotic neuron models via adaptive control method. Int J PharmTech Res 8(8):48–60
Vaidyanathan S (2015) Integral sliding mode control design for the global chaos synchronization of identical novel chemical chaotic reactor systems. Int J ChemTech Res 8(11):684–699
Vaidyanathan S (2015) Output regulation of the forced Van der Pol chaotic oscillator via adaptive control method. Int J PharmTech Res 8(6):106–116
Vaidyanathan S (2015) Sliding controller design for the global chaos synchronization of forced Van der Pol chaotic oscillators. Int J PharmTech Res 8(7):100–111
Vaidyanathan S (2015) Synchronization of Tokamak systems with symmetric and magnetically confined plasma via adaptive control. Int J ChemTech Res 8(6):818–827
Vaidyanathan S (2016) A novel 3-D conservative chaotic system with a sinusoidal nonlinearity and its adaptive control. Int J Control Theory Appl 9(1):115–132
Vaidyanathan S (2016) A novel 3-D jerk chaotic system with three quadratic nonlinearities and its adaptive control. Arch Control Sci 26(1):19–47
Vaidyanathan S (2016) A novel 3-D jerk chaotic system with two quadratic nonlinearities and its adaptive backstepping control. Int J Control Theory Appl 9(1):199–219
Vaidyanathan S (2016) Anti-synchronization of 3-cells cellular neural network attractors via integral sliding mode control. Int J PharmTech Res 9(1):193–205
Vaidyanathan S (2016) Generalized projective synchronization of Vaidyanathan Chaotic system via active and adaptive control. In: Vaidyanathan S, Volos C (eds) Advances and applications in nonlinear control systems. Springer, Berlin, Germany, pp 97–116
Vaidyanathan S (2016) Global chaos control of the FitzHugh-Nagumo chaotic neuron model via integral sliding mode control. Int J PharmTech Res 9(4):413–425
Vaidyanathan S (2016) Global chaos control of the generalized Lotka-Volterra three-species system via integral sliding mode control. Int J PharmTech Res 9(4):399–412
Vaidyanathan S (2016) Global chaos regulation of a symmetric nonlinear gyro system via integral sliding mode control. Int J ChemTech Res 9(5):462–469
Vaidyanathan S (2016) Hybrid synchronization of the generalized Lotka-Volterra three-species biological systems via adaptive control. Int J PharmTech Res 9(1):179–192
Vaidyanathan S (2016) Mathematical analysis, adaptive control and synchronization of a ten-term novel three-scroll chaotic system with four quadratic nonlinearities. Int J Control Theory Appl 9(1):1–20
Vaidyanathan S, Azar AT (2015) Analysis, control and synchronization of a nine-term 3-D novel chaotic system. In: Azar AT, Vaidyanathan S (eds) Chaos modelling and control systems design. Studies in computational intelligence, vol 581. Springer, Germany, pp 19–38
Vaidyanathan S, Azar AT (2016) Takagi-Sugeno fuzzy logic controller for Liu-Chen four-scroll chaotic system. Int J Intell Eng Inform 4(2):135–150
Vaidyanathan S, Boulkroune A (2016) A novel 4-D hyperchaotic chemical reactor system and its adaptive control. In: Vaidyanathan S, Volos C (eds) Advances and applications in chaotic systems. Springer, Berlin, Germany, pp 447–469
Vaidyanathan S, Madhavan K (2013) Analysis, adaptive control and synchronization of a seven-term novel 3-D chaotic system. Int J Control Theory Appl 6(2):121–137
Vaidyanathan S, Pakiriswamy S (2016) A five-term 3-D novel conservative chaotic system and its generalized projective synchronization via adaptive control method. Int J Control Theory Appl 9(1):61–78
Vaidyanathan S, Pakiriswamy S (2013) Generalized projective synchronization of six-term Sundarapandian chaotic systems by adaptive control. Int J Control Theory Appl 6(2):153–163
Vaidyanathan S, Pakiriswamy S (2015) A 3-D novel conservative chaotic system and its generalized projective synchronization via adaptive control. J Eng Sci Technol Rev 8(2):52–60
Vaidyanathan S, Pakiriswamy S (2016) Adaptive control and synchronization design of a seven-term novel chaotic system with a quartic nonlinearity. Int J Control Theory Appl 9(1):237–256
Vaidyanathan S, Rajagopal K (2011) Hybrid synchronization of hyperchaotic Wang-Chen and hyperchaotic Lorenz systems by active non-linear control. Int J Syst Signal Control Eng Appl 4(3):55–61
Vaidyanathan S, Rajagopal K (2012) Global chaos synchronization of hyperchaotic Pang and hyperchaotic Wang systems via adaptive control. Eur J Sci Res 7(1):28–37
Vaidyanathan S, Rajagopal K (2016) Adaptive control, synchronization and LabVIEW implementation of Rucklidge chaotic system for nonlinear double convection. Int J Control Theory Appl 9(1):175–197
Vaidyanathan S, Rajagopal K (2016) Analysis, control, synchronization and LabVIEW implementation of a seven-term novel chaotic system. Int J Control Theory Appl 9(1):151–174
Vaidyanathan S, Rasappan S (2014) Global chaos synchronization of \(n\)-scroll Chua circuit and Lur’e system using backstepping control design with recursive feedback. Arab J Sci Eng 39(4):3351–3364
Vaidyanathan S, Sampath S (2011) Global chaos synchronization of hyperchaotic Lorenz systems by sliding mode control. Commun Comput Inf Sci 205:156–164
Vaidyanathan S, Volos C (2015) Analysis and adaptive control of a novel 3-D conservative no-equilibrium chaotic system. Arch Control Sci 25(3):333–353
Vaidyanathan S, Volos C (2016) Advances and applications in chaotic systems. Springer, Berlin, Germany
Vaidyanathan S, Volos C (2016) Advances and applications in nonlinear control systems. Springer, Berlin, Germany
Vaidyanathan S, Volos C (2017) Advances in memristors, memristive devices and systems. Springer, Berlin, Germany
Vaidyanathan S, Volos C, Pham VT, Madhavan K, Idowu BA (2014) Adaptive backstepping control, synchronization and circuit simulation of a 3-D novel jerk chaotic system with two hyperbolic sinusoidal nonlinearities. Arch Control Sci 24(3):375–403
Vaidyanathan S, Azar AT, Rajagopal K, Alexander P (2015) Design and SPICE implementation of a 12-term novel hyperchaotic system and its synchronisation via active control. Int J Modell Ident Control 23(3):267–277
Vaidyanathan S, Idowu BA, Azar AT (2015) Backstepping controller design for the global chaos synchronization of Sprott’s jerk systems. In: Azar AT, Vaidyanathan S (eds) Chaos modeling and control systems design. Springer, Berlin, Germany, pp 39–58
Vaidyanathan S, Rajagopal K, Volos CK, Kyprianidis IM, Stouboulos IN (2015) Analysis, adaptive control and synchronization of a seven-term novel 3-D chaotic system with three quadratic nonlinearities and its digital implementation in LabVIEW. J Eng Sci Technol Rev 8(2):130–141
Vaidyanathan S, Volos CK, Kyprianidis IM, Stouboulos IN, Pham VT (2015) Analysis, adaptive control and anti-synchronization of a six-term novel jerk chaotic system with two exponential nonlinearities and its circuit simulation. J Eng Sci Technol Rev 8(2):24–36
Vaidyanathan S, Volos CK, Pham VT (2015) Analysis, adaptive control and adaptive synchronization of a nine-term novel 3-D chaotic system with four quadratic nonlinearities and its circuit simulation. J Eng Sci Technol Rev 8(2):181–191
Vaidyanathan S, Volos CK, Pham VT (2015) Global chaos control of a novel nine-term chaotic system via sliding mode control. In: Azar AT, Zhu Q (eds) Advances and applications in sliding mode control systems. Studies in computational intelligence, vol 576. Springer, Germany, pp 571–590
Vaidyanathan S, Volos CK, Rajagopal K, Kyprianidis IM, Stouboulos IN (2015) Adaptive backstepping controller design for the anti-synchronization of identical WINDMI chaotic systems with unknown parameters and its SPICE implementation. J Eng Sci Technol Rev 8(2):74–82
Vaidyanathan S, Madhavan K, Idowu BA (2016) Backstepping control design for the adaptive stabilization and synchronization of the Pandey jerk chaotic system with unknown parameters. Int J Control Theory Appl 9(1):299–319
Volos CK, Kyprianidis IM, Stouboulos IN, Tlelo-Cuautle E, Vaidyanathan S (2015) Memristor: a new concept in synchronization of coupled neuromorphic circuits. J Eng Sci Technol Rev 8(2):157–173
Volos CK, Pham VT, Vaidyanathan S, Kyprianidis IM, Stouboulos IN (2015) Synchronization phenomena in coupled Colpitts circuits. J Eng Sci Technol Rev 8(2):142–151
Volos CK, Pham VT, Vaidyanathan S, Kyprianidis IM, Stouboulos IN (2016) Synchronization phenomena in coupled hyperchaotic oscillators with hidden attractors using a nonlinear open loop controller. In: Vaidyanathan S, Volos C (eds) Advances and applications in chaotic systems. Springer, Berlin, Germany, pp 1–38
Volos CK, Pham VT, Vaidyanathan S, Kyprianidis IM, Stouboulos IN (2016) The case of bidirectionally coupled nonlinear circuits via a memristor. In: Vaidyanathan S, Volos C (eds) Advances and applications in nonlinear control systems. Springer, Berlin, Germany, pp 317–350
Volos CK, Prousalis D, Kyprianidis IM, Stouboulos I, Vaidyanathan S, Pham VT (2016) Synchronization and anti-synchronization of coupled Hindmarsh-Rose neuron models. Int J Control Theory Appl 9(1):101–114
Volos CK, Vaidyanathan S, Pham VT, Maaita JO, Giakoumis A, Kyprianidis IM, Stouboulos IN (2016) A novel design approach of a nonlinear resistor based on a memristor emulator. In: Azar AT, Vaidyanathan S (eds) Advances in chaos theory and intelligent control. Springer, Berlin, Germany, pp 3–34
Wang B, Zhong SM, Dong XC (2016) On the novel chaotic secure communication scheme design. Commun Nonlinear Sci Numer Simul 39:108–117
Wolf A, Swift JB, Swinney HL, Vastano JA (1985) Determining Lyapunov exponents from a time series. Physica D 16:285–317
Wu T, Sun W, Zhang X, Zhang S (2016) Concealment of time delay signature of chaotic output in a slave semiconductor laser with chaos laser injection. Opt Commun 381:174–179
Xu G, Liu F, Xiu C, Sun L, Liu C (2016) Optimization of hysteretic chaotic neural network based on fuzzy sliding mode control. Neurocomputing 189:72–79
Xu H, Tong X, Meng X (2016) An efficient chaos pseudo-random number generator applied to video encryption. Optik 127(20):9305–9319
Zhou W, Xu Y, Lu H, Pan L (2008) On dynamics analysis of a new chaotic attractor. Phys Lett A 372(36):5773–5777
Zhu C, Liu Y, Guo Y (2010) Theoretic and numerical study of a new chaotic system. Intell Inf Manage 2:104–109
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Vaidyanathan, S. (2017). Global Stabilization of Nonlinear Systems via Novel Second Order Sliding Mode Control with an Application to a Novel Highly Chaotic System. In: Vaidyanathan, S., Lien, CH. (eds) Applications of Sliding Mode Control in Science and Engineering. Studies in Computational Intelligence, vol 709. Springer, Cham. https://doi.org/10.1007/978-3-319-55598-0_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-55598-0_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-55597-3
Online ISBN: 978-3-319-55598-0
eBook Packages: EngineeringEngineering (R0)